Изобретение относится к двухкоординатным графопостроителям на линейных электродвигателях с программным управлением и может быть использовано для регистрации графической информации, в прецизионных станках и т.п. высокоточных копирующих устройствах.
Из уровня техники известны двухкоординатные столы с программным управлением, содержащие перпендикулярно расположенные направляющие, головку (каретку) с рабочим органом и средства перемещения, выполненные в виде линейных электродвигателей (см. Авт. св. СССР 1239736, кл. G 06 K 15/22, 1986 г. ; Патент США 4392642, кл. 269/73, 1983 г.; Патент США 4667139, кл. 318/681, 1987 г.). Основной недостаток известных решений заключается в невысокой точности воспроизведения информации.
Более высокой точностью, надежностью и долговечностью характеризуются координатные устройства, содержащие две параллельные направляющие, расположенные вдоль противоположных сторон стола, портал, установленный с возможностью реверсивного перемещения по этим направляющим, головку с рабочим органом, которая установлена на портале с возможностью реверсивного перемещения, средства перемещения портала и головки, выполненные преимущественно в виде линейных (шаговых) электродвигателей, и программный блок управления (см. Авт. св. СССР 150339, кл. B 23 B 39/04, 1962 г.; Авт. св. СССР 288593, кл. B 43 L 13/00, 1970 г.; Авт. св. СССР 1743303, кл. G 06 K 15/22, 1995 г.; Патент Франции 2603720, кл. G 06 K 15/22, 1987 г.; Патент США 538272, кл. 33/181, 1995 г.; EP 0195091, кл. G 06 K 15/22, 1985 г.) Однако в силу конструктивных особенностей отдельных узлов известные устройства эффективно работают лишь при небольших нагрузках и при координировании на небольших поверхностях.
Наиболее близким к изобретению является координатный стол, содержащий основание, две параллельные направляющие, закрепленные вдоль противоположных сторон основания, портал, установленный с возможностью реверсивного перемещения по направляющим, головку с рабочим органом, установленную с возможностью реверсивного перемещения вдоль портала, средства перемещения портала и головки с рабочим органом, которые выполнены в виде линейных электродвигателей, и программный блок управления (см. Авт. св. 745720, кл. B 43 L 13/02, 1980 г.).
К недостатку данного координатного стола можно отнести ограниченные функциональные возможности и недостаточную точность из-за использования винтовых пар и отсутствия синхронизированного привода на обе параллельные направляющие, по которым перемещается портал.
Используемые в координатном столе для реверсивного перемещения портала и головки с рабочим органом линейные индукторные двигатели, которые обеспечивают прецизионный электропривод, содержат статор, который закрепляют на несущей направляющей балке или портале, и подвижный элемент (индуктор), снабженный, как правило, аэростатическими опорами (см. Патент США 4667139, кл. 319/681, 1987 г.).
Для повышения точности программного перемещения несущую балку изготавливают из металла или гранита, что приводит к увеличению веса и соответственно мощности электродвигателя. При этом для повышения точности регулирования силы тяги линейные электродвигатели выполняют многофазными с шихтованными в продольном направлении зубчатым статором и подвижным элементом-индуктором, состоящим из фазных электромагнитных модулей, включающих П-образные магнитопроводы, обмотки управления и постоянные магниты (см. Авт. св. СССР 1629950, кл. H 02 K 41/02, 1991 г.). Однако известные способы изготовления шихтованных пакетов магнитопроводов (см. Авт. св. СССР 886141, кл. H 02 K 1/02, 1985 г.) или практически малопригодны для изготовления многофазных модульных индукторов, или очень сложны (см. Патент РФ 2014712, кл. H 02 K 41/025, 1994 г.), поскольку основаны на технологии газотермического напыления, или не обеспечивают достаточной точности из-за того, что при наборе шихтованного пакета магнитопроводов фазных электромагнитных модулей из профилированных пластин, которые вырезают из листов электротехнической стали (см. Авт. св. СССР 1515279, кл. H 02 K 41/02, 1989 г.), трудно выдержать заданные, расчетные геометрические параметры, обеспечивающие оптимальные рабочие характеристики линейного электродвигателя.
Изобретение направлено на создание координатного стола с прецизионным электроприводом на многофазных линейных электродвигателях с повышенной точностью, надежностью и долговечностью работы.
Кроме того, целью изобретения является повышение точности и упрощение технологии сборки при изготовлении индуктора многофазного линейного электродвигателя, используемого в качестве средства перемещения портала и головки с рабочим органом координатного стола.
Решение поставленной задачи обеспечивается тем, что в координатном столе, содержащем основание, две параллельные направляющие, закрепленные вдоль противоположных сторон основания, портал, установленный с возможностью реверсивного перемещения по направляющим, головку с рабочим органом, установленную с возможностью реверсивного перемещения вдоль портала, средства перемещения портала и головки с рабочим органом, которые выполнены в виде многофазовых линейных электродвигателей, согласно изобретению статоры линейных электродвигателей размещены соответственно на каждой боковой направляющей и на портале, а их подвижные элементы-индукторы снабжены трехсторонними аэростатическими опорами, при этом подвижные элементы боковых линейных электродвигателей прикреплены к концам портала посредством шарнирных опор, соответственно с двумя и тремя степенями свободы, а на подвижном элементе портального линейного электродвигателя смонтирована головка с рабочим органом.
Возможно выполнение основания координатного стола в виде вакуумного планшета, при этом портал может быть снабжен вакуумными присосками.
Предпочтительно, чтобы головка с рабочим органом была закреплена на подвижном элементе портального линейного электродвигателя с помощью магнитного фиксатора, выполненного в виде постоянного магнита с боковыми замыкателями, снабженного подвижной шунтирующей перемычкой.
При этом в портале координатного стола, содержащего несущую балку, на которой расположен зубчатый статор линейного электродвигателя, согласно изобретению несущая балка выполнена в виде пустотелого профиля, а по бокам вдоль зубчатого статора с обеих сторон симметрично закреплены опорные бруски из гранита, базальта или подобных твердых горных пород и материалов без остаточных внутренних напряжений.
Кроме того, решение поставленной задачи достигается также тем, что в способе изготовления индуктора многофазного линейного двигателя в виде модульной конструкции, включающем набор пакета магнитопроводов фазных электромагнитных модулей из профилированных пластин, вырезанных из листов электротехнической стали, размещение на них обмоток управления, соединение модулей в монолитную конструкцию с установкой между ними постоянных магнитов, согласно изобретению первоначально из листов электротехнической стали вырезают профилированные заготовки-полосы, состоящие из последовательно расположенных на заданном расстоянии пластин магнитопроводов, прикрепленных технологическими перемычками к несущей рамке, набирают из них общий пакет магнитопроводов, размещают обмотку управления и постоянные магниты, формируют монолитный блок, после чего удаляют технологические перемычки.
Предложенное конструктивное выполнение портала и наличие шарнирного соединения последнего с индукторами - подвижными элементами боковых линейных электродвигателей в сочетании с использованием многофазных линейных индукторных электродвигателей оригинальной конструкции и технологии изготовления обеспечивает высокую точность программного перемещения рабочего органа по двум координатам, исключает возможность заклинивания или стопорения портала при его перекосе из-за погрешностей в синхронной работе боковых линейных электродвигателей и деформации даже при минимальных рабочих (воздушных) зазорах в зубцовой зоне, улучшает тяговые характеристики, что в итоге повышает надежность и долговечность работы координатного стола.
На фиг. 1 схематично представлен общий вид координатного стола.
На фиг. 2 - сечение 1-1 на фиг. 1.
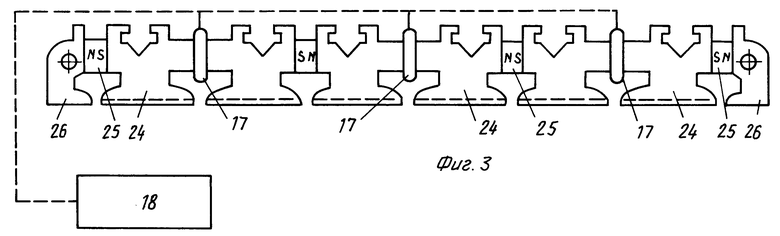
На фиг. 3 изображена схема индуктора.
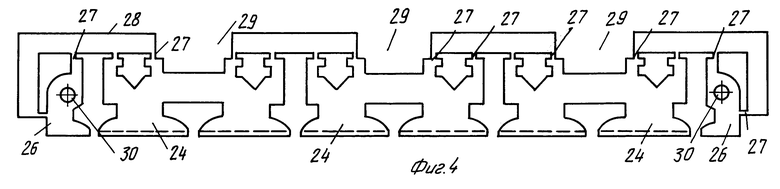
На фиг. 4 представлен общий вид профилированной полосы-заготовки для изготовления индуктора.
Координатный стол содержит основание 1, две боковые направляющие 2 из гранита или базальта, параллельно расположенные вдоль противоположных сторон основания 1, на которых закреплены зубчатые статоры 3 боковых линейных индукторных двигателей, подвижные элементы-индукторы 4 которых прикреплены к концам портала 5 посредством шарнирных опор 6 и 7, имеющих соответственно две и три степени свободы. Портал 5 выполнен в виде несущей пустотелой балки 8 (см. фиг. 2) из металла или стеклопластика прямоугольного профиля, на которой закреплены посередине зубчатый статор 9 портального линейного индуктора электродвигателя и симметрично с обоих сторон последнего опорные бруски 10 из гранита или базальта, а к подвижному элементу-индуктору 11 портального линейного электродвигателя с помощью магнитного фиксатора 12 прикреплена головка 13 с рабочим органом (пером, лазером, резцом, сверлом и т.п. средством).
Подвижные элементы-индукторы 4 и 11 линейных электродвигателей снабжены трехсторонними симметрично расположенными аэростатическими опорами 14 и 15 (на каждом подвижном элементе симметрично относительно продольной оси установлены три пары несущих опор 14 и две пары боковых опор 15), которые подключены к компрессорному блоку 16, а обмотки 17 управления индукторов 4 и 11 электрически связаны с программным блоком 18 управления, который может быть выполнен на базе персонального компьютера.
Магнитный фиксатор 12 выполнен в виде постоянного магнита 19 с боковыми замыкателями 20, снабженного подвижной шунтирующей перемычкой 21, что обеспечивает удобство и быстроту замены головки 13 и рабочего органа.
Основание 1 координатного стола может быть выполнено в виде вакуумного планшета, подключенного к системе 22 вакуумирования, что обеспечивает надежное закрепление обрабатываемой поверхности, кроме того, на портале 5 целесообразно размещение дополнительных вакуумных присосок 23, также подключенных к системе 22 вакуумирования, которые обеспечивают возможность автоматического перемещения обрабатываемой поверхности (бумаги, пленки и т.д.) относительно основания 1 координатного стола.
Согласно изобретению в координатном столе в качестве средств реверсивного перемещения используются трехфазные линейные индукторные двигатели, содержащие шихтованные в продольном направлении зубчатый статор 3, 9 и подвижный элемент-индуктор 4, 11, который состоит из трех фазных электромагнитный модулей (см. фиг. 3), включающих П-образный магнитопровод 24 с зубчатой рабочей поверхностью и размещенную на его поперечине обмотку 17 управления, постоянных магнитов 25 и замыкателей 26 магнитных потоков, собранных в монолитную конструкцию.
Изготовляют индукторы следующим образом.
Первоначально из листов электротехнической стали вырезают (выштамповывают) заготовки - профилированные полосы (см. фиг. 4), состоящие из последовательно расположенных на заданном расчетном расстоянии пластины магнитопроводов 24 и замыкателей 26, прикрепленных технологическими перемычками 27 к несущей рамке 28, имеющей окна 29 для удобства выполнения обмотки 17 управления, и технологические отверстия 30 для облегчения процесса точной сборки. Затем из этих профилированных полос, используя шаблонную оснастку под технологические отверстия 30, собирают общий пакет магнитопроводов, соединяя профилированные полосы между собой путем склеивания или спекания, размещают (наматывают) через окна 29 на поперечинах П-образных фазных магнитопроводов 24 обмотки 17 управления, устанавливают постоянные магниты 25 и формируют монолитный блок, заливая конструкцию эпоксидной смолой или аналогичным по свойствам компаундом.
На конечном этапе в полученном монолитном блоке удаляют, например лазерным лучом, технологические перемычки, при этом образуется монолитная конструкция трехфазного индуктора со строго выдержанными геометрическими параметрами - расстояниями между фазными электромагнитными модулями.
Координатный стол работает следующим образом.
По сигналам программного блока 18 управления одновременно и независимо друг от друга формируются токи управления, которыми запитывают обмотки 17 управления подвижных элементов-индукторов 4 боковых линейных двигателей и обмотки 17 управления подвижного элемента-индуктора 11 портального линейного двигателя.
При этом ток, протекающий по обмоткам 17 управления, порождает магнитный поток управления, который замыкается через ветви магнитопровода 24, через воздушный зазор между зубчатыми рабочими поверхностями индуктора 4, 11 и статора 3, 9 и через статор 3, 9. Этот магнитный поток, взаимодействуя с потоком возбуждения от постоянных магнитов 25, который замыкается через соседние магнитопроводы 24, замыкатели 26, через воздушный зазор между индуктором 4, 11 и статором 3, 9 и через статор 3, 9, создает тяговое усилие, действующее на подвижный элемент-индуктор 4, 11 линейных электродвигателей, в результате чего происходит перемещение соответственно портала 5 по боковым направляющим 2 и головки 13 с рабочим органом вдоль портала 5, которое обеспечивает двухкоординатное движение рабочего органа с высокой точностью по любой заданной траектории.
Программный блок 13 управления обеспечивает также нормальную работу аэростатических опор 14 и 15, которые исключают механическое трение между подвижными элементами-индукторами 4, 11 и статорами 3, 9 линейных электродвигателей, регулируя подачу воздуха от компрессорного блока 16 в три пары несущих опор 14, каждая из которых расположена так, что компенсирует силу притяжения к статору 3, 9 в основном одного соответствующего магнитопровода 24, и в две пары боковых опор 15, и управляет работой подключенных к системе 22 вакуумирования вакуумных присосок основания 1 - вакуумного планшета и вакуумных присосок 23, установленных на портале 5.
| название | год | авторы | номер документа |
|---|---|---|---|
| КООРДИНАТНОЕ УСТРОЙСТВО | 2000 |
|
RU2173625C1 |
| КООРДИНАТНЫЙ СТОЛ (ВАРИАНТЫ) | 2003 |
|
RU2244617C1 |
| КООРДИНАТНЫЙ СТОЛ | 2010 |
|
RU2472606C2 |
| КООРДИНАТНОЕ УСТРОЙСТВО | 2003 |
|
RU2242348C1 |
| Сверлильный станок | 1982 |
|
SU1047610A2 |
| КООРДИНАТНЫЙ СТОЛ | 2009 |
|
RU2417870C2 |
| Координатный стол | 1981 |
|
SU996165A1 |
| Координатная измерительная машина | 1986 |
|
SU1425426A1 |
| Координатная измерительная машина | 1984 |
|
SU1151060A1 |
| Сверлильный станок | 1978 |
|
SU770674A1 |

Изобретение относится к двухкоординатным устройствам на линейных двигателях с программным управлением, и может быть использовано в прецизионных станках, высокоточных копирующих устройствах, в графических установках. Вдоль противоположных сторон основания стола закреплены две параллельные направляющие. Портал установлен с возможностью перемещения на направляющих. Средства перемещения выполнены в виде линейных электродвигателей. Зубчатые статоры размещены на каждой боковой направляющей и на портале. Подвижные элементы-индукторы снабжены трехсторонними аэростатическими опорами. При этом подвижные элементы боковых линейных электродвигателей прикреплены к концам портала посредством шарнирных опор, имеющих соответственно две и три степени свободы. На подвижном элементе электродвигателя смонтирована головка с рабочим органом. Портал содержит пустотелую несущую балку, на которой посередине установлен зубчатый статор. С обеих сторон статора симметрично закреплены опорные бруски из гранита или базальта. Индукторы изготовляют следующим образом. Первоначально из листов электротехнической стали вырезают профилированные полосы. Их располагают на заданном расстоянии и прикрепляют технологическими перемычками к несущей рамке. Набирают из них общий пакет магнитопроводов. Размещают обмотки управления и постоянные магниты. Формируют монолитный блок, после чего удаляют технологические перемычки. Изобретение позволяет обеспечить высокую точность обработки на координатном столе, надежность и долговечность работы электродвигателей. 3 с. и 2 з.п. ф-лы, 4 ил.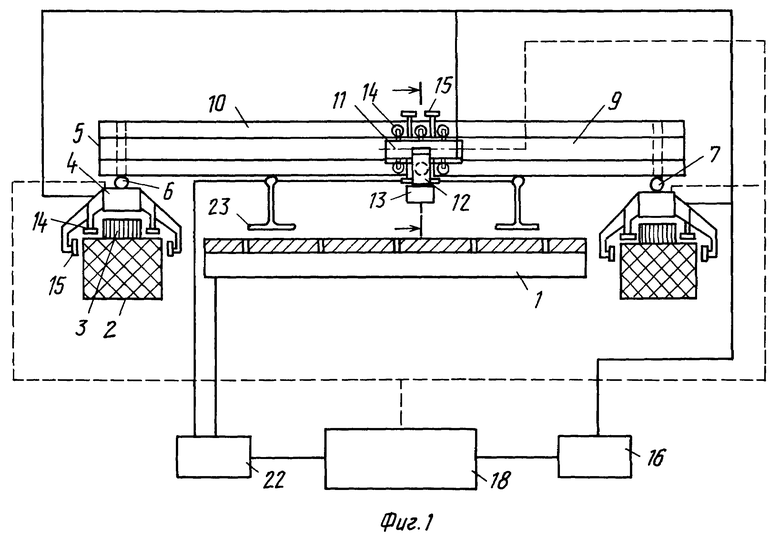
| Координатный чертежный прибор | 1978 |
|
SU745720A1 |
| Вторичный элемент линейного индукторного электродвигателя | 1987 |
|
SU1515279A1 |
| Координатограф | 1983 |
|
SU1239736A1 |
| ЧЕРТЕЖНАЯ ДВУХКООРДИНАТНАЯ МАШИНА С ПРОГРАММНБ1М УПРАВЛЕНИЕМ | 0 |
|
SU288593A1 |
| ЭЛЕКТРОМЕХАНИЧЕСКОЕ ЗАЖИМНОЕ УСТРОЙСТВО | 1991 |
|
RU2083345C1 |
| СТОЛ ДЛЯ ЗАКРЕПЛЕНИЯ ДЕТАЛЕЙ | 1993 |
|
RU2091201C1 |
| СПОСОБ ПРИЖАТИЯ ТОНКОЛИСТОВОЙ ЗАГОТОВКИ К ОПРАВКЕ | 1995 |
|
RU2104852C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ИЗОЛИРОВАННОЙ ПЛАСТИНЫ ОБМОТКИ СТАТОРА АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ | 1991 |
|
RU2041550C1 |
| ПЕРВИЧНЫЙ ЭЛЕМЕНТ ЛИНЕЙНОГО ЭЛЕКТРОДВИГАТЕЛЯ ПОДЪЕМНОГО УСТРОЙСТВА | 1992 |
|
RU2044391C1 |
| Линейный индукторный двигатель | 1988 |
|
SU1629950A1 |
