Изобретение относится к области машиностроения, а именно к устройствам, обеспечивающим линейное перемещение обрабатываемого изделия по двум взаимоперпендикурярным осям, и может быть использовано в высокоточном технологическом оборудовании, например, при обработке изделий лазерным инструментом.
Известен координатный стол, содержащий модуль продольного перемещения, состоящий из основания с направляющими, портала, выполненного в виде взаимодействующих с направляющими кареток, балки и привода, и модуль поперечного перемещения, выполненный в виде размещенных на балке портала направляющих, взаимодействующей с направляющими каретки, привода каретки и скрепленной с кареткой головки с рабочим органом. Для соединения балки с каретками модуля поперечного перемещения выполнены шарнирные соединения [1].
Однако при перемещении рабочего органа на портал действуют значительные динамические нагрузки, связанные с ускорением. При этом происходит изменение центра тяжести балки с размещенным на ней модулем поперечного перемещения. Это ухудшает точность позиционирования рабочего органа, а в некоторых случаях вызывает заклинку кареток поперечного перемещения. К тому же шарнирные соединения, особенно с тремя степенями свободы, сложны в изготовлении.
Результат, для достижения которого направлено данное техническое решение, заключается в повышении точности позиционирования при одновременном упрощении конструкции.
Указанный результат достигается за счет того, что координатный стол, содержащий модуль продольного перемещения, состоящий из основания с направляющими, портала, выполненного в виде взаимодействующих с направляющими кареток, балки и привода, и модуль поперечного перемещения, выполненный в виде размещенных на балке портала направляющих, взаимодействующей с направляющими каретки, привода каретки и скрепленной с кареткой головки с рабочим органом, снабжен скрепленными с каретками модуля продольного перемещения эластичными элементами, противоположные концы которых скреплены с нижней и верхней частями соответствующих торцов балки.
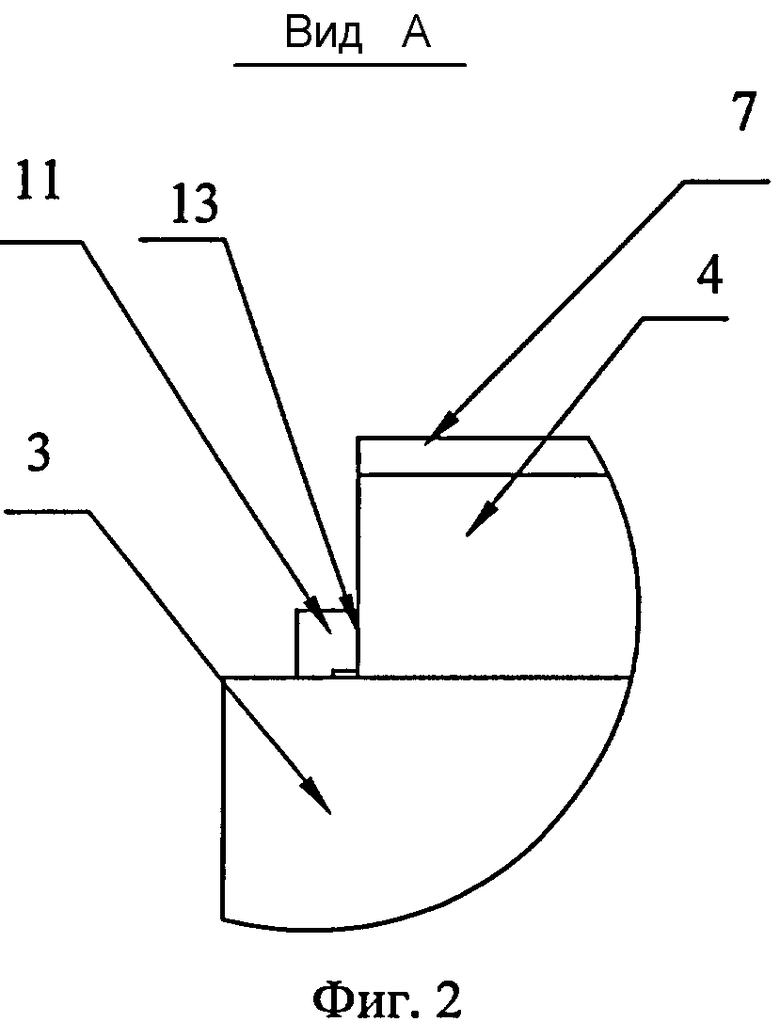
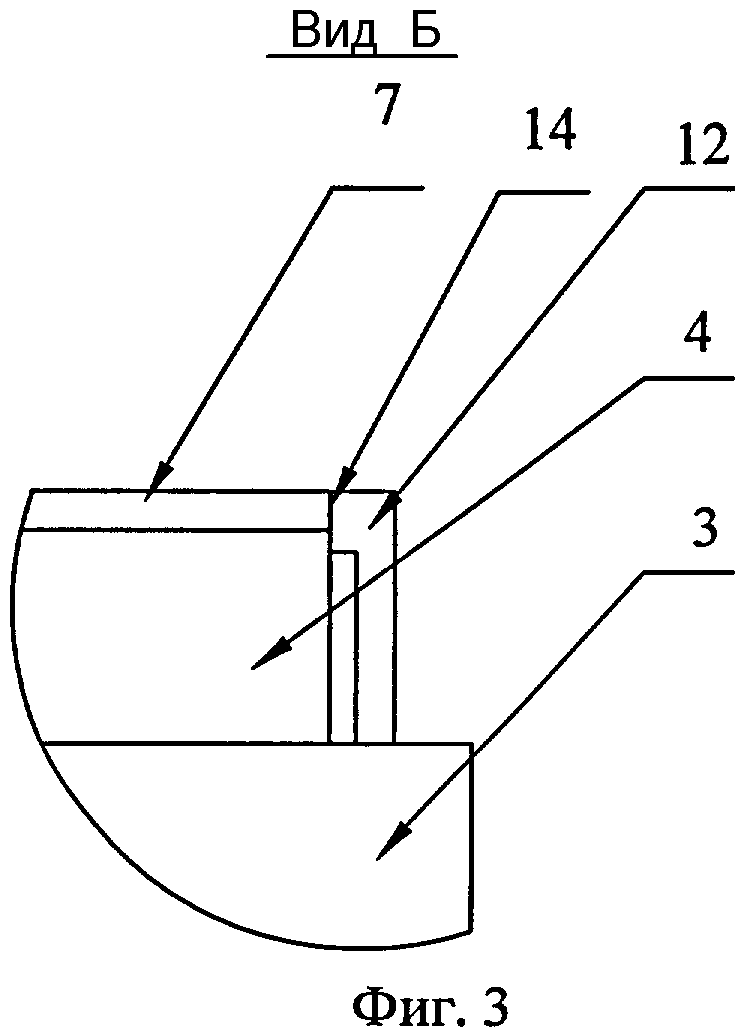
Изобретение поясняется чертежами, где на фиг.1 изображено заявляемое устройство, на фиг.2 - место А, на фиг.3 - место Б.
Координатный стол содержит модуль продольного и поперечного перемещения.
Модуль продольного перемещения состоит из основания 1 с направляющими 2, портала, выполненного в виде взаимодействующих с направляющими кареток 3, балки 4 и приводов кареток, каждый из которых может быть выполнен в виде линейного двигателя с индуктором 5 и якорем 6.
Модуль поперечного перемещения выполнен в виде размещенных на балке 4 портала направляющих 7, взаимодействующей с направляющими 7 каретки 8, привода каретки (на чертеже не показанного) и скрепленной с кареткой головки 9 с рабочим органом 10. Привод каретки модуля поперечного перемещения может быть выполнен в виде линейного двигателя с индуктором и якорем.
Координатный стол снабжен скрепленными с каретками 3 модуля продольного перемещения эластичными элементами 11, 12, противоположные концы которых скреплены с нижней и верхней частями соответствующих торцов 13 и 14 балки 4. Гибкий элемент может быть выполнен в виде пластины.
При перемещении портала гибкий элемент 12, скрепленный с верхней торцевой частью 14 балки 4, позволяет компенсировать непараллельность направляющих 2 портала модуля продольного перемещения за счет собственного изгиба. Кроме того, пластина 12 позволяет компенсировать (предотвратить заклинивание и чрезмерную нагрузку на каретки направляющих) неперпендикулярность модуля продольного и поперечного перемещения за счет собственного кручения.
Гибкий элемент 11, скрепленный с нижней торцевой частью 13 балки 4, позволяет компенсировать неперпендикулярность модуля продольного и поперечного перемещения за счет собственного кручения.
При движении кареток 3 по направляющим 2 модуля продольного перемещения с установленным на них модулем поперечного перемещения посредством гибких пластин 11, 12 возможно возникновение статических и динамических отклонений от параллельности и перпендикулярности взаимного положения модулей. Деформация гибких пластин 11, 12 позволяет предотвратить заклинивание и создание чрезмерной нагрузки на каретки 3, что позволяет им перемещаться с минимальными силами трения. В результате повышается точность позиционирования рабочего органа.
Таким образом, предложенное техническое решение позволит:
- повысить точность позиционирования рабочего органа;
- упростить конструкцию.
Источники информации
1. Патент РФ №2173625, МКИ B23Q 1/25, 2000 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| КООРДИНАТНЫЙ СТОЛ | 2010 |
|
RU2472606C2 |
| КООРДИНАТНЫЙ СТОЛ (ВАРИАНТЫ) | 2003 |
|
RU2244617C1 |
| КООРДИНАТНОЕ УСТРОЙСТВО | 2000 |
|
RU2173625C1 |
| КРЕСТОВЫЙ СТОЛ | 2009 |
|
RU2418667C2 |
| КООРДИНАТНЫЙ СТОЛ, ПОРТАЛ КООРДИНАТНОГО СТОЛА И СПОСОБ ИЗГОТОВЛЕНИЯ ИНДУКТОРА МНОГОФАЗНОГО ЛИНЕЙНОГО ЭЛЕКТРОДВИГАТЕЛЯ | 1998 |
|
RU2133184C1 |
| Устройство для установки на печатные платы радиоэлементов, преимущественно поверхностного монтажа | 1988 |
|
SU1777256A1 |
| КООРДИНАТНЫЙ СТОЛ ДЛЯ ЛАЗЕРНОГО СТАНКА | 2020 |
|
RU2731492C1 |
| МОДУЛЬ ПЕРЕМЕЩЕНИЯ КООРДИНАТНОГО УСТРОЙСТВА | 2009 |
|
RU2421317C2 |
| КООРДИНАТНЫЙ СТОЛ | 1992 |
|
RU2029447C1 |
| Графопостроитель | 1979 |
|
SU877587A1 |
Изобретение относится к области машиностроения, а именно к устройствам, обеспечивающим линейное перемещение обрабатываемого изделия по двум взаимоперпендикулярным осям. Координатный стол содержит модуль продольного и поперечного перемещения. Модуль продольного перемещения состоит из основания 1 с направляющими 2, портала, выполненного в виде взаимодействующих с направляющими кареток 3, балки 4 и приводов кареток, каждый из которых может быть выполнен в виде линейного двигателя с индуктором 5 и якорем 6. Модуль поперечного перемещения выполнен в виде размещенных на балке 4 портала направляющих 7, взаимодействующей с направляющими 7 каретки 8, привода каретки и скрепленной с кареткой головки 9 с рабочим органом 10. Привод каретки модуля поперечного перемещения может быть выполнен в виде линейного двигателя с индуктором и якорем. Координатный стол снабжен скрепленными с каретками 3 модуля продольного перемещения гибкими элементами 11, 12, противоположные концы которых скреплены с нижней и верхней частями соответствующих торцов 13 и 14 балки 4. Обеспечивается повышение точности позиционирования при одновременном упрощении конструкции. 3 ил.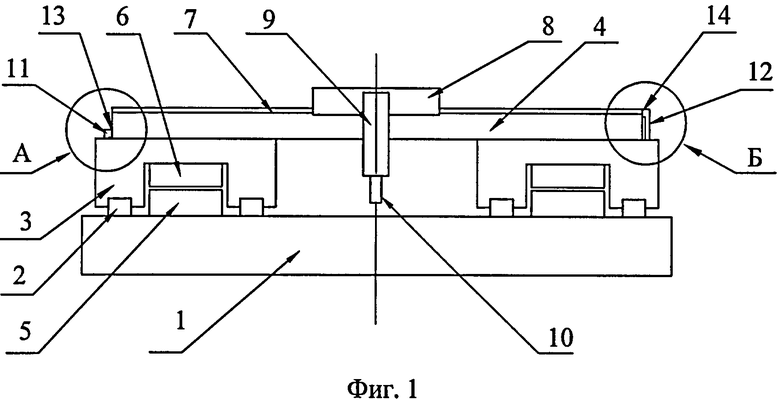
Координатный стол, содержащий модуль продольного перемещения, состоящий из основания с направляющими, портала, выполненного в виде взаимодействующих с направляющими кареток, балки и привода, и модуль поперечного перемещения, выполненный в виде размещенных на балке портала направляющих, взаимодействующих с направляющими каретки, привода каретки и скрепленной с кареткой головки с рабочим органом, отличающийся тем, что он снабжен скрепленными с каретками модуля продольного перемещения гибкими элементами, противоположные концы которых скреплены с нижней и верхней частями соответствующих торцов балки.
| КООРДИНАТНОЕ УСТРОЙСТВО | 2000 |
|
RU2173625C1 |
| Способ сборки портального станка | 1988 |
|
SU1657331A1 |
| US 4834353 A, 30.05.1989. | |||

