Область техники, к которой относится изобретение
Данное изобретение относится к средствам для поочередного подъема уложенных в штабель листов, перемещения их и укладки на станок для дальнейшей обработки, в частности для лазерной резки.
Уровень техники
В настоящее время известны манипуляторы, обеспечивающие подъем листов из штабеля и их перемещение к столу для резки. Это, к примеру, двухкоординатный стол с подъемными присосками (международная заявка WO 2008/139409, опубл. 20.11.2008).
Однако данное устройство не обеспечивает возможности точного позиционирования листа, поскольку способно перемещать лист только в одном направлении.
Известны устройства для вертикального перемещения каретки с присосками и горизонтальное смещение этой каретки с поднятым листом к станку (авторское свидетельство СССР №1268257, опубл. 07.11.1986; патент Германии №4217148, опубл. 03.02.1994).
Однако эти устройства также не могут обеспечить точное позиционирование листа, если необходимо хотя бы немного довернуть его вокруг вертикальной оси.
Известны устройства, позволяющие поочередно перемещать листы из штабеля по вертикали, сдвигать их в двух направлениях по горизонтали и поворачивать на некоторый угол вокруг вертикали (патент США №5187958, опубл. 23.02.1993; заявка Японии №2001-252842, опубл. 28.09.2001).
Однако эти устройства весьма сложны по конструкции.
Раскрытие изобретения
Таким образом, задача, на решение которой направлено настоящее изобретение, состоит в обеспечении достаточно простого устройства для поочередного подъема уложенных в штабель листов, перемещения их и точной укладки на станок для дальнейшей обработки, в частности для лазерной резки.
Для решения этой задачи и получения технического результата в виде упрощения устройства при обеспечении точного позиционирования укладываемого листа предложен манипулятор, предназначенный для подъема верхнего листа из уложенных в штабель листов и переноса его на рабочий стол обрабатывающего станка и содержащий: силовой портал, имеющий две продольные опоры, разнесенные в пространстве на заранее заданное расстояние в практически горизонтальной плоскости, и одну поперечную направляющую, которая расположена практически горизонтально на заранее заданной высоте над продольными опорами, направляющие рельсы по числу продольных опор, выполненные с возможностью перемещения каждой из продольных опор вдоль соответствующего направляющего рельса; каретку, выполненную с возможностью перемещения вдоль поперечной направляющей; захватное средство, выполненное с возможностью захвата верхнего листа; подъемное средство, установленное на каретке и выполненное с возможностью вертикального перемещения захватного средства; приводные двигатели по числу продольных опор, выполненные каждый с возможностью независимого перемещения своей продольной опоры; при этом каждая из продольных опор выполнена с возможностью отклонения в горизонтальной плоскости от направления своего направляющего рельса.
Особенность манипулятора по настоящему изобретению состоит в том, что каждая из продольных опор имеет по меньшей мере два опорных ролика, разнесенных по длине соответствующей продольной опоры, и каждый из опорных роликов установлен на соответствующей оси с возможностью качения по соответствующему направляющему рельсу, причем положение одного из этих опорных роликов зафиксировано на соответствующей оси для предотвращения перемещения данного опорного ролика вдоль этой оси, а каждый из остальных опорных роликов каждой продольной опоры имеет возможность перемещения вдоль своей оси для обеспечения возможности отклонения продольной опоры в горизонтальной плоскости от направления своего направляющего рельса. Предпочтительно, каждая из продольных опор имеет три опорных ролика, положение среднего из которых зафиксировано на соответствующей оси.
Еще одна особенность манипулятора по настоящему изобретению состоит в том, что заранее заданное расстояние в горизонтальной плоскости и заранее заданная высота выбраны в соответствии с максимально возможными шириной листа и высотой штабеля.
Еще одна особенность манипулятора по настоящему изобретению состоит в том, что захватное средство выполнено в виде пневматических присосок, расположенных на горизонтальной перекладине П-образной рамы, вертикальные концы которой установлены в соответствующих подъемных пневмоцилиндрах подъемного средства, при этом каретка снабжена приводным пневмоцилиндром для ее перемещения и вакуумной системой для селективной запитки всех пневмоцилиндров и пневматических присосок.
Наконец, еще одна особенность манипулятора по настоящему изобретению состоит в том, что каждый из направляющих рельсов снабжен по своей длине зубчатым ремнем, а каждый из приводных двигателей представляет собой электродвигатель и содержит редуктор для зацепления с зубчатым ремнем.
Краткое описание чертежей
Манипулятор по настоящему изобретению иллюстрируется чертежами, на которых одинаковые элементы обозначены одними и теми же ссылочными позициями.
На фиг.1 представлен вид в изометрии манипулятора по настоящему изобретению.
На фиг.2 этот же манипулятор показан в разобранном виде.
На фиг.3 схематически проиллюстрирована установка опорных роликов на продольной опоре.
Подробное описание изобретения
Как показано на фиг.1 и 2, манипулятор по настоящему изобретению содержит силовой портал 1, имеющий две продольные опоры 2, разнесенные в пространстве на заранее заданное расстояние в практически горизонтальной плоскости, и одну поперечную направляющую 3, которая расположена практически горизонтально на заранее заданной высоте над продольными опорами 2. Указанные заранее заданное расстояние в практически горизонтальной плоскости и заранее заданная высота выбраны в соответствии с максимально возможными шириной листа и высотой штабеля.
Продольные опоры 2 установлены на соответствующих направляющих рельсах 4, выполненных с возможностью перемещения каждой из продольных опор 2 вдоль соответствующего направляющего рельса 4. Для этого каждый из направляющих рельсов 4 снабжен по своей длине зубчатым ремнем 5, а на силовом портале 1 установлены приводные двигатели 6, каждый их которых представляет собой электродвигатель и содержит редуктор (не показано) для зацепления с зубчатым ремнем 5. На фиг.2 показана петля зубчатого ремня 5, зубцы которого обращены внутрь этой петли. Редуктор приводного двигателя 6 входит в эту петлю, формирование которой задается двумя вертикально проходящими по бокам редуктора стержнями. При вращении редуктора зубчатый ремень 5, закрепленный на концах направляющего рельса 4 и охватывающий этот редуктор своей петлей, перемещается вдоль направляющего рельса 4 и обеспечивает перемещение продольной опоры вдоль направляющего рельса 4.
Специалистам понятно, что вместо зубчатого ремня и редуктора можно использовать любые средства, обеспечивающие перемещение продольной опоры 2 вдоль направляющего рельса 4. К примеру, зубчатый ремень можно не использовать, а редуктор можно заменить фрикционным диском. Конкретное выполнение средств для перемещения продольной опоры 2 по направляющему рельсу 4 общеизвестно специалистам из уровня техники и не входит в объем притязаний по настоящему патенту.
По поперечной направляющей 3 может перемещаться каретка 7 с помощью приводного пневмоцилиндра 8. На этой каретке 7 установлено подъемное средство в виде подъемных пневмоцилиндров 9 для вертикального перемещения П-образной рамы 10, вертикальные концы которой установлены в соответствующих подъемных пневмоцилиндрах 9 подъемного средства. На горизонтальной перекладине П-образной рамы 10 установлено захватное средство, выполненное в виде пневматических присосок 11.
Приводной пневмоцилиндр 8, подъемные пневмоцилиндры 9 и пневматические присоски 11 могут селективно запитываться от вакуумной системы 12, размещенной на каретке 7. Конкретное выполнение пневмоцилиндров 8 и 9 и пневматических присосок 11, рáвно как и вакуумной системы 12, общеизвестно специалистам из уровня техники и не входит в объем притязаний по настоящему патенту.
На фиг.3 схематически показана установка трех опорных роликов 13-15 на продольной опоре 2. Каждый из опорных роликов 13-15 установлен на соответствующей оси с возможностью качения по соответствующему направляющему рельсу 4. На фиг.3 каждый из опорных роликов 13-15 показан имеющим по окружности канавку, которая приходится на выступ соответствующего сечения на направляющем рельсе 4. Однако специалистам понятно, что каждый из опорных роликов 13-15 может, наоборот, иметь выступ по своей окружности, тогда направляющий рельс 4 будет иметь соответствующее углубление по своей длине. В данном случае применимо любое известное средство, обеспечивающее фиксацию опорного ролика 13-15 на направляющем рельсе 4.
Как показано на фиг.3, положение одного из этих опорных роликов - среднего опорного ролика 14 по фиг.3 - зафиксировано на соответствующей оси для предотвращения перемещения данного опорного ролика 14 вдоль этой оси, например, благодаря двум выступам на противоположных стенках продольной опоры 2. Каждый из двух крайних опорных роликов 13 и 15 имеет возможность перемещения вдоль своей оси для обеспечения возможности отклонения продольной опоры 2 в горизонтальной плоскости от направления своего направляющего рельса 4. Т.е. продольная опора 2 благодаря такой установке опорных роликов может немного отклоняться от направления своего направляющего рельса 4.
Специалистам понятно, что опорных роликов может быть не обязательно три. Вполне возможны конструкции, к примеру, с двумя опорными роликами, разнесенными по длине соответствующей продольной опоры 2. Число опорных роликов может быть и больше трех, например четыре, пять и т.д. При этом не обязательно должен быть зафиксирован именно средний опорный ролик, как на фиг.3. Возможно, скажем, зафиксировать от перемещения вдоль оси любой из крайних опорных роликов 13, 15 на фиг.3 либо один из опорных роликов, если их использовано всего два.
В то же время, описанный выше вариант осуществления по фиг.3, в котором продольная опора 2 может перемещаться по направляющему рельсу 4 с помощью соответственно установленных опорных роликов 13-15, является предпочтительным, но не единственно возможным. Действительно, возможен, к примеру, вариант осуществления, в котором каждая продольная опора 2 имеет возможность перемещаться по направляющему рельсу 4 на двух или более опорных роликах, положение которых фиксировано на соответствующих осях. При этом опорные ролики перемещаются в углублении направляющего рельса 4, имеющем ширину, превышающую ширину каждого опорного ролика. Продольная опора 2 в этом случае выполнена охватывающей направляющий рельс 4 в поперечном сечении и снабжена на обоих своих концах парами регулируемых упоров, каждый из которых может скользить по внешней стороне охватываемого направляющего рельса 4. Пара регулируемых упоров может быть установлена на скобе, охватывающей продольную опору 2 в поперечной плоскости и шарнирно закрепленной в середине, а сами регулируемые упоры могут в этом случае проходить в сквозные отверстия в боковых сторонах продольной опоры 2. Тогда небольшой поворот скобы вокруг оси своего шарнирного закрепления в ту или иную сторону будет приводить к вдвижению одного регулируемого упора внутрь продольной опоры 2, а другого - к выдвижению из этой продольной опоры 2. Если эти регулируемые упоры на одном конце каждой продольной опоры 2 смещаются так, что с одной стороны упор выступает больше, чем с другой, а на другом конце каждой продольной опоры 2 регулируемые упоры выступают с обеих сторон одинаково, обе продольные опоры 2 повернутся на некоторый угол относительно направляющих рельсов 4. Этот угол еще увеличится, если на другом конце каждой продольной опоры 2 регулируемые упоры смещаются в направлении, противоположном направлению смещения другой пары регулируемых упоров, имеющейся на этой продольной опоре 2.
Специалисту понятно, что могут иметь место и иные варианты осуществления продольных опор с возможностью их отклонения в горизонтальной плоскости от направления своего направляющего рельса.
Манипулятор по настоящему изобретению работает следующим образом. Штабель 16 (показанный пунктиром на фиг.1) высотой Н предназначенных для последующей обработки листов - к примеру, металлических - с длиной L и шириной W устанавливается между направляющими рельсами 4, например, с помощью автопогрузчика. Манипулятор по настоящему изобретению сконструирован так, что продольные опоры 2 силового портала 1 разнесены одна от другой на расстояние не менее L, а горизонтальная направляющая 3 силового портала 1 расположена на такой высоте, чтобы пневматические присоски 11 при полностью поднятой П-образной раме 10 оказались на высоте не менее Н от поверхности, на которой находится штабель 16. При этом силовой портал 1 сдвинут от этого штабеля 16 практически до конца направляющих рельсов 4 в сторону обрабатывающего станка (влево по фиг.1), чтобы не препятствовать установке штабеля 16.
После установки штабеля 16 осуществляется одновременная запитка приводных двигателей 6 (электродвигателей), и продольные опоры 2, перемещаясь вдоль направляющих рельсов 4, передвигают силовой портал 1 к штабелю 16. Когда захватное средство (присоски 11) оказывается над верхним листом штабеля 16, силовой портал 1 останавливается, и П-образная рама 10 с помощью подъемных пневмоцилиндров 9 опускается до касания присосками 11 верхнего листа в штабеле 16. Пневматические присоски 11 (посредством вакуумной системы 12) захватывают верхний лист, после чего П-образная рама 10 поднимается подъемными пневмоцилиндрами на требуемую высоту. Далее каретка 7 перемещается вдоль поперечной направляющей 3 с помощью приводного пневмоцилиндра 8 до требуемого положения.
Приводные двигатели 6 запитываются таким образом, чтобы обеспечить перемещение соответствующих продольных опор 2 вдоль направляющих рельсов 4 для подачи поднятого листа к обрабатывающему станку. Поскольку положение каждого листа в штабеле 16 не обязательно строго повторяет положение предыдущего (или последующего) листа, может потребоваться некоторый доворот листа вокруг вертикальной оси. Это выполняется путем, например, запитки приводных двигателей 6 напряжениями разной величины или запиткой их в течение разного времени, чтобы обеспечить неравномерное движение продольных опор 2 вдоль своих направляющих рельсов 4. При этом из-за подвижности некоторых из опорных роликов 13-15 вдоль своих осей в каждой продольной опоре 2 и фиксированного положения определенных опорных роликов (поз.14 на фиг.3) продольные опоры 2 слегка «перекашиваются» в своем перемещении по направляющим рельсам 4. Учитывая, что длина продольных опор 2 достаточно велика, это «перекашивание» обеспечивает поворот поднятого листа на требуемый (как правило, достаточно малый) угол.
После укладки перенесенного листа на станок для дальнейшей обработки (к примеру, станок для лазерной резки) за счет опускания захватного средства с помощью подъемных пневмоцилиндров 9 в пневматических присосках 11 восстанавливается атмосферное давление, в результате чего лист остается на рабочем столе станка в требуемом положении. Пневматические присоски 11 на горизонтальной перекладине 10 П-образной рамы поднимаются вверх подъемными пневмоцилиндрами 9, и силовой портал 1 перемещается к штабелю 16 для захвата и переноса следующего листа.
Специалисту понятно, что в случае иного варианта осуществления продольных опор изменится только способ управления их «перекашиванием». К примеру, при использовании вышеописанных регулируемых упоров отклонение продольных опор в горизонтальной плоскости будет происходить, как в и предпочтительном варианте, но за счет смещения регулируемых упоров, а не за счет разной запитки двигателей каждой из продольных опор.
Работа манипулятора по настоящему изобретению может быть автоматизирована при снабжении манипулятора датчиками положения листа (к примеру, видеодатчиками), сигналы с которых будут подаваться в программируемый блок обработки (к примеру, соответственно запрограммированный процессор), выходные сигналы которого будут в нужные моменты времени подаваться на приводные двигатели 6, приводной пневмоцилиндр 8, подъемные пневмоцилиндры 9 и пневматические присоски 11.
Таким образом, манипулятор по настоящему изобретению, будучи простым по конструкции, обеспечивает возможность точного позиционирования укладываемого листа.
| название | год | авторы | номер документа |
|---|---|---|---|
| КООРДИНАТНЫЙ СТОЛ (ВАРИАНТЫ) | 2003 |
|
RU2244617C1 |
| КООРДИНАТНЫЙ СТОЛ ДЛЯ ЛАЗЕРНОГО СТАНКА | 2020 |
|
RU2731492C1 |
| СТАНОК ДЛЯ ЛАЗЕРНОЙ РЕЗКИ МАТЕРИАЛОВ | 2011 |
|
RU2468903C1 |
| КОМБИНИРОВАННОЕ ЗАХВАТНОЕ УСТРОЙСТВО РОБОТА-МАНИПУЛЯТОРА | 2019 |
|
RU2730343C1 |
| УСТРОЙСТВО РУБКИ ДВИЖУЩЕЙСЯ ЛЕНТЫ ДРЕВЕСНОГО ШПОНА С НОЖОМ И МЕХАНИЗМОМ ВЕРТИКАЛЬНОГО ПЕРЕМЕЩЕНИЯ | 2009 |
|
RU2403148C1 |
| Линия погрузки стеклотары в контейнер | 1989 |
|
SU1742175A1 |
| УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ РЕМИЗНОГО НАБОРА В ОСНОВОПРОБОРНОЙ МАШИНЕ | 1991 |
|
RU2072010C1 |
| Станок для сборки и сварки полотнищ с поперечными ребрами | 1976 |
|
SU662302A1 |
| УСТРОЙСТВО ДЛЯ ПРИВАРКИ УСИЛИТЕЛЯ К ПЛОСКОМУ ЛИСТУ | 2024 |
|
RU2834726C1 |
| Загрузочно-разгрузочное устройство | 1988 |
|
SU1569179A1 |


Изобретение относится к манипуляторам, в частности, для поочередного подъема уложенных в штабель листов, перемещения их и укладки на станок для дальнейшей обработки. Манипулятор содержит силовой портал с двумя продольными опорами и одной поперечной направляющей, рельсы для перемещения по ним продольных опор вдоль соответствующего направляющего рельса, каретку, выполненную с возможностью перемещения вдоль поперечной направляющей, захватное средство, выполненное с возможностью захвата верхнего листа, подъемное средство для вертикального перемещения захватного средства, установленное на каретке, приводные двигатели по числу продольных опор для независимого их перемещения. Каждая из продольных опор выполнена с возможностью отклонения в горизонтальной плоскости от направления своего направляющего рельса. Обеспечивается упрощение устройства при обеспечении точного позиционирования укладываемого листа. 5 з.п. ф-лы, 3 ил.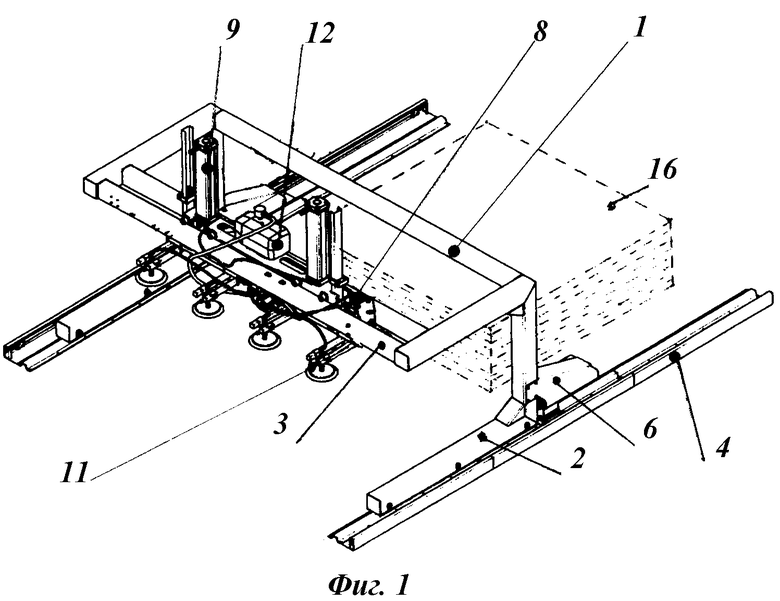
1. Манипулятор для подъема верхнего листа из уложенных в штабель листов и переноса его на рабочий стол обрабатывающего станка, содержащий силовой портал, имеющий две продольные опоры, разнесенные в пространстве на заранее заданное расстояние в практически горизонтальной плоскости, и одну поперечную направляющую, которая расположена практически горизонтально на заранее заданной высоте над упомянутыми продольными опорами, направляющие рельсы по числу упомянутых продольных опор, выполненные с возможностью перемещения каждой из упомянутых продольных опор вдоль соответствующего направляющего рельса, каретку, выполненную с возможностью перемещения вдоль упомянутой поперечной направляющей, захватное средство, выполненное с возможностью захвата упомянутого верхнего листа, подъемное средство, установленное на упомянутой каретке и выполненное с возможностью вертикального перемещения упомянутого захватного средства, приводные двигатели по числу упомянутых продольных опор, выполненные каждый с возможностью независимого перемещения своей продольной опоры, при этом каждая из упомянутых продольных опор выполнена с возможностью отклонения в горизонтальной плоскости от направления своего направляющего рельса.
2. Манипулятор по п.1, в котором каждая из упомянутых продольных опор имеет по меньшей мере два опорных ролика, разнесенных по длине соответствующей продольной опоры, и каждый из упомянутых опорных роликов установлен на соответствующей оси с возможностью качения по соответствующему направляющему рельсу, причем положение одного из этих опорных роликов зафиксировано на соответствующей оси для предотвращения перемещения данного опорного ролика вдоль этой оси, а каждый из остальных опорных роликов каждой продольной опоры имеет возможность перемещения вдоль своей оси для обеспечения упомянутой возможности отклонения продольной опоры в горизонтальной плоскости от направления своего направляющего рельса.
3. Манипулятор по п.2, в котором каждая из упомянутых продольных опор имеет три упомянутых опорных ролика, положение среднего из которых зафиксировано на соответствующей оси.
4. Манипулятор по п.1, в котором упомянутые заранее заданное расстояние в горизонтальной плоскости и заранее заданная высота выбраны в соответствии с максимально возможными шириной упомянутого листа и высотой упомянутого штабеля.
5. Манипулятор по п.1, в котором упомянутое захватное средство выполнено в виде пневматических присосок, расположенных на горизонтальной перекладине П-образной рамы, вертикальные концы которой установлены в соответствующих подъемных пневмоцилиндрах упомянутого подъемного средства, при этом упомянутая каретка снабжена приводным пневмоцилиндром для ее перемещения и вакуумной системой для селективной запитки всех упомянутых пневмоцилиндров и пневматических присосок.
6. Манипулятор по п.1, в котором каждый из упомянутых направляющих рельсов снабжен по своей длине зубчатым ремнем, а каждый из упомянутых приводных двигателей представляет собой электродвигатель и содержит редуктор для зацепления с упомянутым зубчатым ремнем.
| Манипулятор | 1986 |
|
SU1463463A1 |
| ПОРТАЛЬНЫЙ РОБОТ БЕЛЯЕВА Н.П. | 1992 |
|
RU2080243C1 |
| Устройство для отделения листовой заготовки от стопы и подачи ее в зону обработки | 1988 |
|
SU1611524A1 |
| Портальный робот | 1987 |
|
SU1472251A1 |
| Козловой кран | 1990 |
|
SU1754633A1 |

