Предлагаемое изобретение относится к вибрационной технике и может быть использовано при проектировании и модернизации существующего технологического оборудования.
Вибрации широко используются в различных производствах для выполнения транспортных операций, сортировки и классификации сыпучих средств, упрочнения поверхностей деталей в рабочей среде, совершающей периодические встряхивания, при изготовлении литейных ферм и др. Во многих случаях технологические машины представлены вибростендами различных конструкций, виброгрохотами, питателями, бункерами, то есть реализуются в конструктивно-технических формах, предполагающих возможности наличия рабочих органов, создающих определенные, так называемые вибрационные поля. Взаимодействие рабочих сред, отдельных деталей между собой, согласование действий агрегатов и устройств оборудования требует разработки методов оценки, контроля, настройки и формирования распределения амплитуд колебаний точек рабочих органов на всем их функциональном пространстве.
Возбуждение колебаний рабочих органов вибростендов реализуется, как правило, соответствующими вибраторами, чаще всего инерционного типа, создающими воздействия в локальных зонах и малыми вариативными возможностями изменения пространственных распределений и разновидностей связности движения фрагментов вибростенда.
В процессе патентного поиска выявлен ряд изобретений-аналогов.
Известно изобретение [Антипов В.И., Антипова Р.И., Кошелев А.В., Денцов Н.Н. «Вибрационная транспортирующая машина», 2532235 С2, МПК В06В 1/00, приоритет 27.10.2014], представляющее собой вибрационную транспортирующую машину с рабочим органом, соединенным упругой связью с реактивной частью, несущей средство для сообщения резонансных однонаправленных колебаний, и амортизаторы малой жесткости, отличающаяся тем, что средство для сообщения резонансных однонаправленных колебаний выполнено в виде смонтированных на реактивной части машины, по меньшей мере, пары одинаковых параметрических вибровозбудителей, установленных с возможностью вращения роторов инерционных элементов в противоположных направлениях в вертикальных плоскостях и приводимых во вращение от независимых электродвигателей, а резонансная частота средства для сообщения резонансных однонаправленных колебаний определяется из соотношений ω=λ1+λ2, λ1=ν⋅ω, 0<ν<1, где ω - усредненное значение парциальных угловых скоростей роторов, λ1 - эффективная собственная частота качающихся маятников роторов инерционных элементов, λ2=√(C/Мпр) - парциальная собственная частота рабочего органа, соответствующая противофазной форме однонаправленных свободных колебаний, Мпр=М1М2/(М1+М2) - приведенная масса, С - жесткость упругой связи, M1 - масса рабочего органа, М2 - общая масса реактивной части машины.
К недостаткам рассматриваемого аналога можно отнести отсутствие возможностей контроля динамического состояния вибрационной машины.
Известна вибрационная машина [Серга Г.В., Резниченко С.М. «Вибрационная машина для предпосевной обработки семян», 2585476 С1, МПК А01С 1/00, приоритет 27.05.2016], предназначенная для предпосевной обработки семян, содержащая шлифовальный барабан, внутренняя поверхность которого покрыта слоем резины, с разгрузочным окном, рабочий орган, бункер дозатор, выгрузной лоток, установленные упруго на основании, отличающаяся тем, что шлифовальный барабан, внутренняя поверхность которого покрыта слоем резины, выполнен коническим, многозаходным, винтовым и смонтирован из направляющих элементов, выполненных из трех и более скрученных по винтовой линии в продольном направлении относительно продольной оси и изогнутых по винтовой линии в поперечном направлении на оправке в виде параболоида вращения полос, выполненных с боковыми кромками выпуклой криволинейной формы с напусками, и описанные кривыми различного порядка и степени кривизны, при этом по всей длине внутри шлифовального барабана образованы напуски в виде винтовых лопастей, причем по всей длине шлифовального барабана смонтирована коническая пружина с плоским сечением витков и с устройством для изменения шага витков путем растяжения или сжатия пружины.
Недостатками данного изобретения являются отсутствие средств контроля и стабилизации динамического состояния вибрационной машины.
Одним из аналогов является вибрационное устройство для просеивания и подачи материала [ЧЖУ Синлян (CN) «Вибрационное устройство для просеивания и подачи материала», 2567250 С2, МПК В07В 1/28, В07В 1/42, приоритет 10.11.2015], выполненное с одним валом и с возможностью изменения траектории движения, содержит вибрационный короб, нижнюю опорную плиту, вибрационную пружину, вибрационный вал, установленный на вибрационном коробе. Вибрационная пружина установлена между вибрационным коробом и нижней опорной плитой. На двух сторонах вибрационного короба установлено множество групп стержневых узлов, ограничивающих траекторию движения и расположенных наклонно. Каждая группа стержневых узлов, ограничивающих траекторию движения, содержит два стержневых узла, ограничивающих траекторию движения, которые расположены симметрично с обеих сторон вибрационного короба, причем оба конца каждого стержневого узла, ограничивающего траекторию движения, шарнирно прикреплены к вибрационному коробу и нижней опорной плите.
К недостаткам данного изобретения можно отнести сложность конструктивного исполнения, а также отсутствие устройства изменения динамического состояния.
За прототип принимается способ и устройство управления и изменения динамического состояния виброзащитной системы и устройство для его осуществления [Елисеев С.В., Елисеев А.В., Большаков Р.С, Николаев А.В., Выонг К.Ч., Миронов А.С. «Способ управления и изменения динамического состояния виброзащитной системы и устройство для его осуществления», 2696062 С1, МПК F16A 15/04, F16F 7/08, B60N 2/54, приоритет 30.07.2019], согласно которому виброзащитная система снабжается дополнительными элементами, обеспечивающими настройку и контроль ее динамического состояния с помощью датчиков и блока обработки информации и управления этими процессами, отличающийся тем, что формирование требуемых динамических реакций осуществляется путем изменения приведенной жесткости обобщенной пружины. Устройство отличается тем, что управление динамическим состоянием виброзащитной системы осуществляется при помощи изменения приведенной жесткости обобщенной пружины, состоящей из соединенных винтового несамотормозящегося механизма и параллельно введенной обычной пружины и последовательно соединенного с ними пневматического баллона, жесткость которого регулируется компрессором и управляемым дросселем для сброса избыточного давления.
К основным недостаткам прототипа можно отнести наличие излишнего числа дополнительных элементов, отвечающих за контроль динамического состояния.
Задачей предлагаемого изобретения является управление динамическим состоянием вибрационной технологической машины при помощи регулирования параметров упругих блоков и связанных с ними демпферных камер за счет изменения диаметров управляемых дросселей.
Устройство управления динамическим состоянием вибрационной технологической машины, состоящее из пневмобаллонов, компрессора, средств возбуждения колебаний, датчиков контроля динамического состояния, блока регистрации и обработки информации, отличающееся тем, что дополнительно симметрично по обе стороны установлены пневмобаллоны и демпферные камеры, соединенные через дроссели, отвечающие за формирование управляющего сигнала для регулирования давления воздуха.
Способ управления динамическим состоянием вибрационной технологической машины, включающий возбуждение колебаний рабочего органа вибрационной технологической машины и регистрацию смещения координат движения вибрационной технологической машины по п. 1., отличающийся тем, что симметрично размещают блоки из упругих элементов и демпферных камер и настройку параметров распределения амплитуд колебаний рабочего органа обеспечивают путем общего регулирования давления воздуха в пневмобаллонах.
Суть изобретения поясняется чертежами.
На фиг. 1 приведена принципиальная схема вибрационной технологической машины с устройством для управления динамическим состоянием рабочего органа, содержащая опорную поверхность 1, жесткие демпферные камеры 2, 8, компрессоры 3, 7, коммуникации 4, 6, 9, 11, 20, 22, блок регистрации и обработки информации 5, управляемые дроссели 10, 15, 17, 19, 21, резинокордные пневмоамортизаторы 12, 23, датчики (виброметры) 13, 24, рабочий орган 14, вибровозбудитель 14, 14' трубопровод 16, 18.
На фиг. 2 показана расчетная схема вибрационной технологической машины.
На фиг. 3 представлена структурная схема эквивалентной в динамическом отношении системы автоматического управления.
Изобретение работает следующим образом.
Предлагаемое устройство представляет собой механическую колебательную систем с двумя степенями свободы с рабочим органом в виде протяженного твердого тела, обладающего массой М и моментом инерции J, опирающегося на две специальные упруго-пневматические опоры двух камерного типа, соединенные между собой трубопроводами 16, 18 с регулируемым дросселем 17.
Функционирование изобретения осуществляется механической колебательной системой, состоящей из твердого тела (14), обладающего массой М (центр масс в т. О) и моментом инерции J, опирающегося на поверхность 1 с помощью двух пневмоупругих блоков, каждый из которых состоит, в свою очередь, из двух частей: резинокордных пневмоамортизаторов соответственно 12, 23, объединенных с демпферными камерами 2, 8 с помощью управляемых дросселей 10 и 21; при этом демпферные камеры 2 и 8 имеют дополнительные управляемые дроссели 15 и 19, через которые демпферные камеры соединяются трубопроводами 16, 18, через дроссель 17; динамическое состояние системы формируется инерционным вибровозбудителем 14', смещенным относительно центра масс (т. О) на плечо длиной  параметры колебаний рабочего органа 14 измеряются с помощью виброметров 13, 24, установленных в тт. A, F, что обеспечивает, в целом, необходимые движения рабочего органа.
параметры колебаний рабочего органа 14 измеряются с помощью виброметров 13, 24, установленных в тт. A, F, что обеспечивает, в целом, необходимые движения рабочего органа.
Устройство для управления динамическим состоянием рабочего органа вибрационной машины, состоящее из настраиваемой и управляемой пневмосистемы с помощью дросселей, регулирующих перетекание воздуха между упругой и демпферной полостей пневмоблоков 12, 23, а также демпферных блоков между собой с помощью дросселей 10, 21 через трубопроводы 16, 18, контролируемые дросселем 17, имеющие систему поддержания постоянных параметров воздушной среды в камерах через компрессоры 3, 7, связанные с демпферными камерами 2 и 8, обеспечивающие согласованные действия управляемых дросселей через информацию, получаемую от командного блока 5, в котором реализуется алгоритм управления динамическим состоянием на основе получения информации от датчиков 13, 24 через коммуникации 11, 22, а также коммуникационные связи 4, 6, 9, 20, обеспечивающих работу системы в целом путем открытия и закрытия дросселей по сигналам командного блока, обеспечивающих работу системы в целом путем открытия и закрытия дросселей по сигналам командного блока, обеспечивающей необходимое соотношение амплитуд колебаний в т. A, В, определяющих параметры и структуру вибрационного поля при возбуждениях со стороны вибратора.
Теоретическое обоснование
Расчетная схема вибрационной технологической машины с многофункциональной системой управления приводится на фиг. 2. Твердое тело массой М имеет центр тяжести в т. О и обладает относительно этой точки моментом инерции J. Твердое тело опирается на два пневмоупругих блока, каждый из которых состоит из двух камер: рабочей (объемом V1) и демпферной - объемом V10. Камеры соединены между собой регулируемым дросселем. Аналогично устроен и второй блок с параметрами V2 и V20. Дроссельные устройства, соединяющие рабочие и демпферные камеры, обладают свойствами вязкого демпфирования, что учитывается коэффициентами вязкого трения b1 и b2 соответственно.
Демпферные камеры с объемами V10 и V20 соединены между собой через трубопровод большого диаметра, который имеет управляемый демпфер с коэффициентом демпфирования b3. Таким образом, управление динамическим состоянием системы (фиг. 2) может осуществляться в нескольких вариантах (b1=0, b2≠0, b3≠0; b1≠0, b2=0, b3≠0; b1=0, b2=0, b3≠0; b1→∞, b2=0, b3=0 и т.д.).
Построение математической модели системы проводится с учетом использования следующих соотношений: 
 (т. E - точка приложения гармонической силы возбуждения колебаний).
(т. E - точка приложения гармонической силы возбуждения колебаний).
Математическое моделирование в данном случае может быть построено на основе структурного математического моделирования, в рамках которого исходной механической колебательной системе сопоставляется эквивалентная в динамическом отношении структурная схема системы автоматического управления (в соответствии с [1, 2] используется технология операционного исчисления Лапласа).
1. Рассмотрим случай, когда b3=0, b1≠0, b2≠0, что позволяет отобразить в операторной форме приведенные жесткости системы по координатам  и
и  полагая, что объему воздуха V1 в резинокордном блоке определяет жесткость упругого элемента как k1; соответственно для демпферной камеры имеем k10. Аналогично по координате
полагая, что объему воздуха V1 в резинокордном блоке определяет жесткость упругого элемента как k1; соответственно для демпферной камеры имеем k10. Аналогично по координате  твердое тело, таким образом, будет опираться на элемент с приведенной жесткостью
твердое тело, таким образом, будет опираться на элемент с приведенной жесткостью

по координате  имеем соответственно
имеем соответственно

где p=jω - комплексная переменная (j=√-1); значок <-> над переменной означает ее изображение по Лапласу [1, 2].
2. При отсутствии связи (в виде трубопровода) между пневмоблоками kпр1(p) и kпр2(p) и действии гармонической силы  приложенной в т. Е на расстоянии
приложенной в т. Е на расстоянии  от центра масс (т. О, фиг. 2), уравнение движения в операторной форме принимает вид
от центра масс (т. О, фиг. 2), уравнение движения в операторной форме принимает вид


В уравнениях (3), (4) приняты следующие обозначения:

Полагаем, что выражения (3), (4) можно использовать в качестве математической модели (точнее ее структурного варианта) построить структурную схему эквивалентной в динамическом отношении системы автоматического управления, как показано на фиг. 3.
Передаточная функция межпарциальной связи имеет вид

Сделаем промежуточные преобразования и получим, что

После подстановки (1), (2) в (7) выражение примет вид

Выражение может быть приведено к дробно-рациональному виду с полиномами 4-го порядка в числителе и знаменателе.
Аналогичным образом могут быть введены в рассмотрение и использование и другие связи, формируемые, к примеру, при условии b1≠0, b2≠0, b3≠0, или b1≠0, b2≠0, b3 → ∞ и др. Алгоритм управления соотношением координат  предопределяет возможности управления распределением амплитуд колебаний точек рабочего органа по его длине, то есть осуществлять формирование структуры вибрационного поля и управление, таким образом, динамическим состоянием вибрационной технологической машины.
предопределяет возможности управления распределением амплитуд колебаний точек рабочего органа по его длине, то есть осуществлять формирование структуры вибрационного поля и управление, таким образом, динамическим состоянием вибрационной технологической машины.
В частности, при всех открытых дросселях, когда b1=0, b2=0, b3=0, исходная система (точнее расчетная схема технологической машины трансформируется к виду как показано на фиг. 2, но приведенные жесткости упругих элементов будут иметь другие значения). В этом случае система принимает упрощенную конфигурацию, где рабочий орган машин, как твердое тело, опирается на упругие элементы (квазипружины) с жесткостями

по координате  имеем соответственно
имеем соответственно

Возможности системы управления при формировании динамических состояний рабочих органов могут быть существенно расширены при использовании дросселей 15, 19 (фиг. 1) с коэффициентами демпфирования b4 и b5 в демпферных камерах 8 и 2 соответственно.
Таким образом, в настроечных операциях могут быть использованы параметры b1÷b5, каждый из которых может, кроме значений ординарного порядка, принимать и экстремальные значения, равные нулю или бесконечности.
В конечном счете система управления вибростендом при соответствующей предварительной подготовке может получить заранее выбранную программу, реализуемую микропроцессором в процессе отработки заданного режима.
Список использованных источников.
1. Елисеев С.В., Артюнин А.И. Прикладная теория колебаний в задачах динамики линейных механических систем. Новосибирск: Наука, 2016. 459 с.
2. Елисеев СВ. Прикладной системный анализ и структурное математическое моделирование (динамика транспортных и технологических машин: связность движений, вибрационные взаимодействия, рычажные связи): монография - Иркутск: ИрГУПС, 2018. - 692 с.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство настройки, коррекции, формирования и управления динамическим состоянием вибрационной технологической машины и способ для его реализации | 2020 |
|
RU2751042C1 |
| Устройство для формирования вибрационного перемещения рабочей среды | 2021 |
|
RU2773825C1 |
| Устройство коррекции динамического состояния рабочего органа вибрационной технологической машины и способ для его осуществления | 2020 |
|
RU2749987C1 |
| Устройство настройки, корректировки и формирования динамического состояния вибрационной технологической машины и способ для его реализации | 2020 |
|
RU2755646C1 |
| Способ настройки динамического состояния вибрационной технологической машины и устройство для его осуществления | 2018 |
|
RU2718177C1 |
| Устройство формирования специфических режимов динамического состояния рабочего органа вибрационной технологической машины и способ для его реализации | 2020 |
|
RU2756393C1 |
| Способ формирования, настройки и корректировки динамического состояния рабочих органов технологических вибрационных машин на основе введения дополнительных упругих связей и устройство для его реализации | 2019 |
|
RU2749364C2 |
| Способ управления динамическим состоянием технического объекта при вибрационных воздействиях и устройство для его осуществления | 2018 |
|
RU2696506C1 |
| Самонастраивающийся амортизатор | 2018 |
|
RU2696150C1 |
| Способ коррекции динамического состояния рабочего органа технологической вибрационной машины с вибровозбудителем на упругой опоре и устройство для его реализации | 2019 |
|
RU2728886C1 |



Группа изобретений относится к области машиностроения. Устройство состоит из пневмобаллонов, компрессора, средств возбуждения колебаний, датчиков контроля динамического состояния, блока регистрации и обработки информации. Дополнительно симметрично по обе стороны установлены пневмобаллоны и демпферные камеры, соединенные через дроссели, отвечающие за формирование управляющего сигнала для регулирования давления воздуха. Способ включает следующие операции. Возбуждение колебаний рабочего органа вибрационной технологической машины. Регистрацию смещения координат движения вибрационной технологической машины. Симметрично размещают блоки из упругих элементов и демпферных камер. Обеспечивают настройку параметров распределения амплитуд колебаний рабочего органа путем общего регулирования давления воздуха в пневмобаллонах. Достигается повышение производительности работы оборудования, обеспечение надежности и безопасности его эксплуатации. 2 н.п. ф-лы, 3 ил.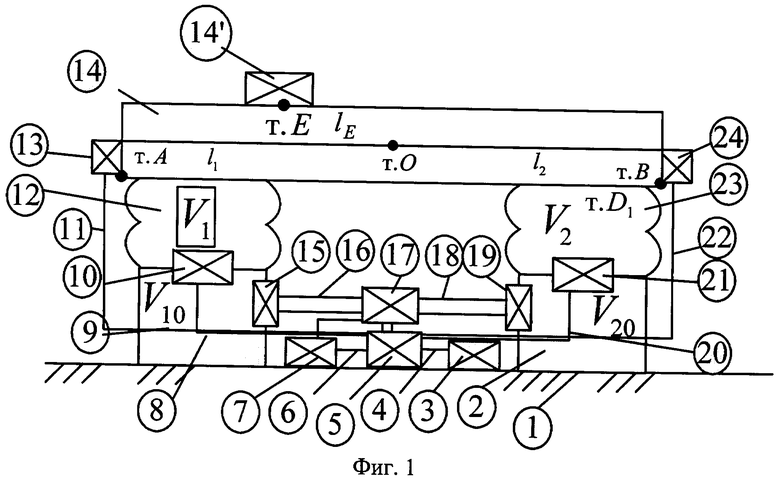
1. Устройство управления динамическим состоянием вибрационной технологической машины, состоящее из пневмобаллонов, компрессора, средств возбуждения колебаний, датчиков контроля динамического состояния, блока регистрации и обработки информации, отличающееся тем, что дополнительно симметрично по обе стороны установлены пневмобаллоны и демпферные камеры, соединенные через дроссели, отвечающие за формирование управляющего сигнала для регулирования давления воздуха.
2. Способ управления динамическим состоянием вибрационной технологической машины, реализуемый устройством по п. 1, включающий возбуждение колебаний рабочего органа вибрационной технологической машины и регистрацию смещения координат движения вибрационной технологической машины, отличающийся тем, что симметрично размещают блоки из упругих элементов и демпферных камер и настройку параметров распределения амплитуд колебаний рабочего органа обеспечивают путем общего регулирования давления воздуха в пневмобаллонах.
| СПОСОБ УПРАВЛЕНИЯ И ИЗМЕНЕНИЯ ДИНАМИЧЕСКОГО СОСТОЯНИЯ ВИБРОЗАЩИТНОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2018 |
|
RU2696062C1 |
| Способ изменения и настройки динамического состояния вибрационной технологической машины и устройство для его осуществления | 2018 |
|
RU2710314C1 |
| US 5179516 A, 12.01.1993 | |||
| US 5100113 A, 31.03.1992. | |||

