Изобретение относится к области подвесных систем высокоточной угловой стабилизации и может быть использовано для подвески и угловой стабилизации аэростатной платформы с вращающейся антенной радиолокационной станции, а также в подъемно-транспортных устройствах, предназначенных для работы с объектами (грузами) повышенной опасности и при проведении высокоточных монтажных работ в труднодоступных местах, например, с помощью вертолетов или высотных кранов.
Известна радиолокационная станция, размещенная внутри дирижабля, включающая антенну, вращающуюся относительно вертикальной оси, жестко установленной на форменном основании (Пат. США 2929551, кл. 244-30, 1960 г.). Указанная конструкция имеет следующие недостатки:
1 - из-за жесткой связи оси вращения антенны с несущей конструкцией дирижабля последняя будет неизбежно колебаться под действием ветровых и других нагрузок по тангажу и крену, что приведет к снижению радиолокационных характеристик системы в целом;
2 - для защиты чувствительной к механическим перегрузкам радиолокационной аппаратуры необходимо организовать ее виброзащиту, особенно от высокочастотных колебаний и ударных нагрузок в процессе эксплуатации, что неизбежно приведет к увеличению габаритно-массовых характеристик системы.
Известно устройство радиолокационного картографирования ледового покрова, содержащее аэростат со стабилизаторами в виде хвостового оперения, привязным кабель-тросом и радиолокационной станцией с вращающейся относительно вертикальной оси антенной и блоком передачи радиолокационной информации, расположенных на грузовой площадке, подвешенной на растяжках в нижней части аэростата (Авторское свидетельство СССР 1803343, МПК В 64 В 1/50, G 01 S 13/89, 1991 - прототип).
Недостатки приведенного устройства аналогичны недостаткам предыдущего аналога. Авторы прототипа отмечают, что стабилизаторы (горизонтальное и вертикальное хвостовое оперение) аэростата обеспечивают его стабильное положение при ветре. Однако, как показывают результаты теоретических и экспериментальных исследований влияния атмосферной турбулентности на устойчивость привязного аэростата (Дж. Де Лаурье. Расчет реакции привязного аэростата на атмосферную турбулентность. De Laurier J.Journal of Aircraft Engineering Notes, 1977, v. 14, 4, p. 407-409), наличие у привязного аэростата стабилизаторов в виде хвостового оперения не исключает его колебаний и, соответственно, грузовой площадки с антенной по тангажу и крену под действием атмосферной турбулентности в продольном и поперечном направлениях. Особенно вредное воздействие на грузовую площадку с радиолокационной станцией оказывают в процессе эксплуатации продольные и поперечные перегрузки в горизонтальной плоскости, т.к. из-за выполнения подвески антенны в виде физического маятника они неизбежно приведут к ее раскачиванию и, соответственно, снижению радиолокационных характеристик системы в целом.
Техническим результатом изобретения является повышение точности угловой стабилизации подвешенного объекта, а также обеспечение его защиты от колебаний и ударных нагрузок в процессе эксплуатации.
Это достигается тем, что устройство угловой стабилизации подвешенного объекта на транспортном средстве, содержащее платформу с местами установки объекта с одной стороны и узлы крепления подвески к нижней части несущей конструкции транспортного средства с другой, снабжено источником сжатого газа, первой системой, имеющей датчик углового отклонения упомянутой платформы от вертикали по крену, второй системой, имеющей датчик углового отклонения от вертикали по тангажу, виброизоляцией для упомянутой первой и второй систем, кардановым подвесом, имеющим наружную в внутреннюю рамки, основанием, имеющим узлы крепления к упомянутой нижней части и жестко прикрепленным к упомянутой внутренней рамке с возможностью одновременного поворота платформы относительно основания во углам крена и тангажа, при этой каждая из упомянутых систем имеет пневмораспределительное устройство, пневмопривод двойного действия, имеющий рабочие камеры из резинокордных оболочек, соединенные с упомянутым пневмораспределительным устройством, магистраль к упомянутому источнику газа, выходы обоих датчиков углового отклонения от вертикали подключены через сумматор и инвертор к соответствующему преобразовательно-усилительному блоку, предназначенному для связи с упомянутым пневмораспределительным устройством, упомянутые оболочки установлены враспор между внутренней и наружной рамками карданового подвеса, а также между наружной рамкой карданового подвеса и упомянутым основанием соответственно, при этом оба упомянутых датчика предназначены для обратной связи углового положения платформы относительно упомянутого основания.
На чертежах приведены схема и общий вид устройства угловой стабилизации подвешенного объекта на транспортом средстве.
На фиг.1 изображена функциональная схема устройства угловой стабилизации подвешенного объекта на транспортном средстве с одной степенью свободы.
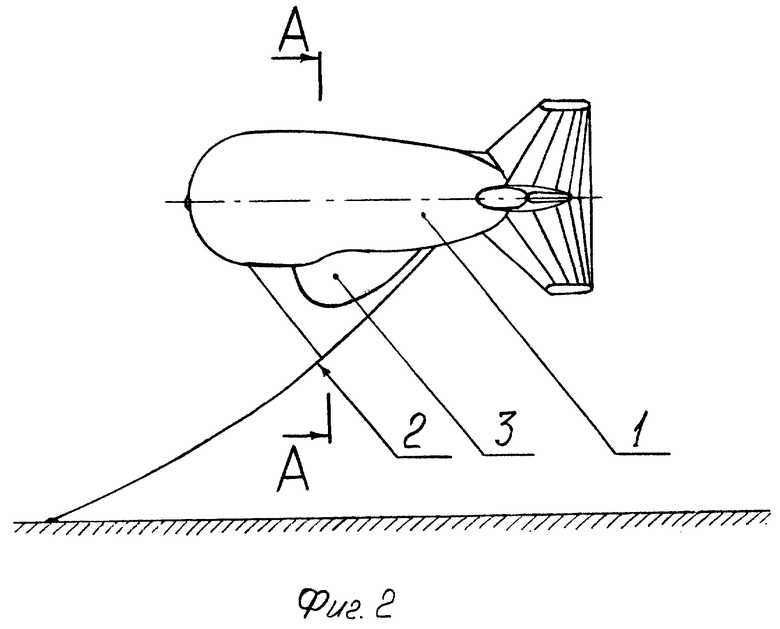
На фиг.2 представлен комплекс привязного аэростата с вращающейся относительно вертикальной оси антенной радиолокационной станции, прикрепленной к устройству угловой стабилизации подвешенного объекта на транспортном средстве.
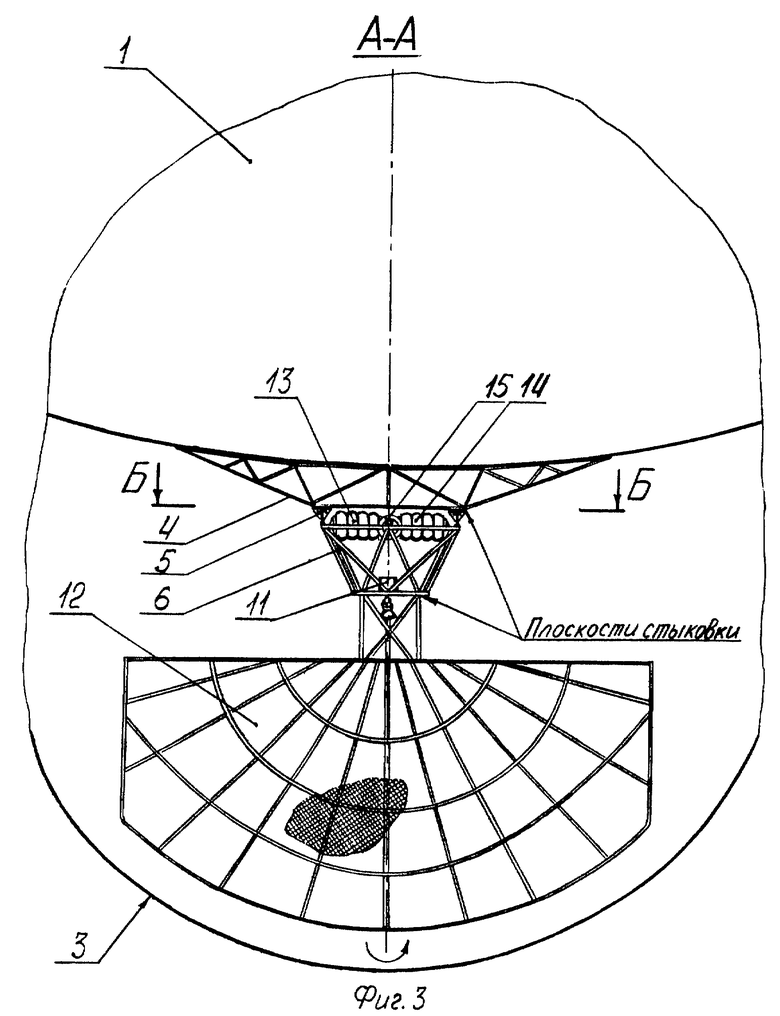
На фиг.3 показан разрез комплекса привязного аэростата по A-A (компрессор, ресиверы, пневмораспределительные устройства с электромеханическими преобразователями и гироскоп условно не показаны).
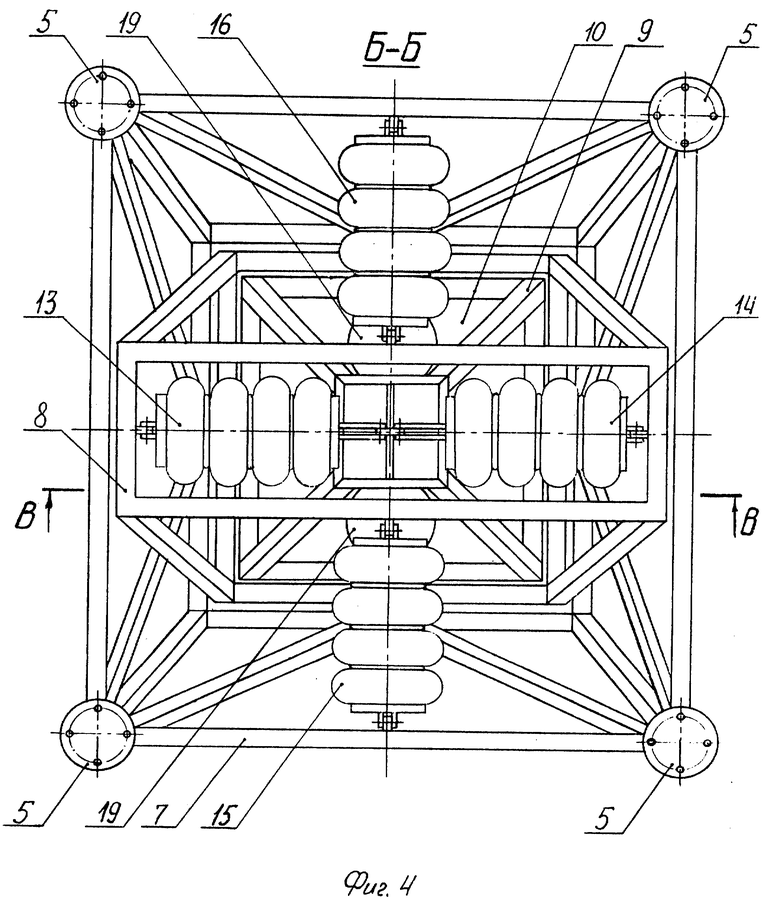
На фиг.4 изображен разрез Б-Б, выполненный по плоскости стыковки устройства угловой стабилизации подвешенного объекта на транспортном средстве и несущей конструкции аэростата (вращающаяся антенна радиолокационной станции условно не показана).
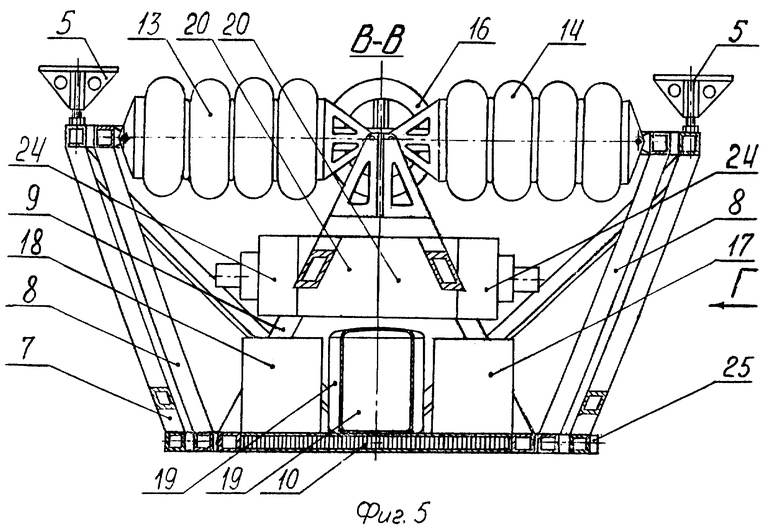
На фиг. 5 показан разрез устройства угловой стабилизации подвешенного объекта на транспортном средстве по B-B.
На фиг.6 изображен разрез по B-B устройства угловой стабилизации подвешенного объекта на транспортном средстве при отклонении аэростата во углу крена на угол α.
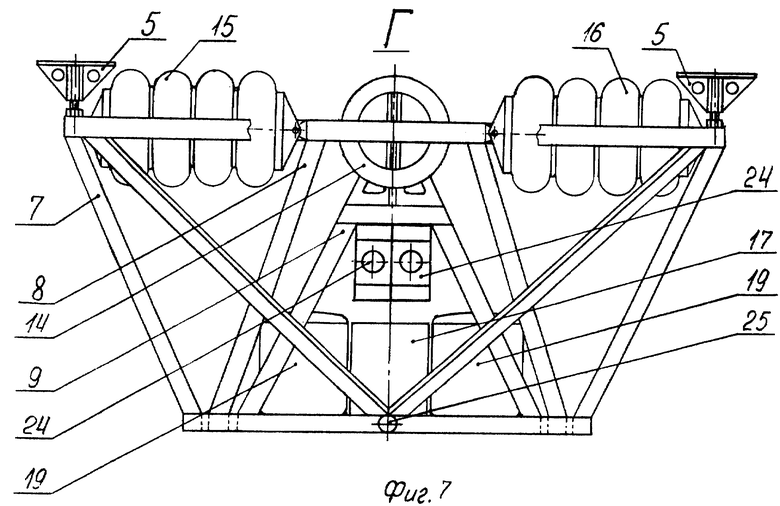
На фиг. 7 показан вид Г на устройство угловой стабилизации подвешенного объекта на транспортном средстве.
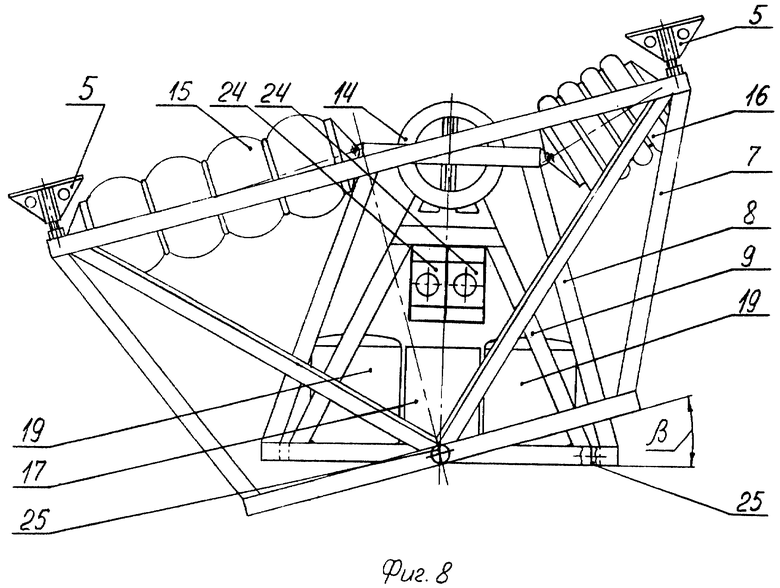
На фиг. 8 показан вид Г на устройство угловой стабилизации подвешенного объекта на транспортном средстве при отклонении аэростата по углу тангажа на угол β.
Устройство угловой стабилизации подвешенного объекта на транспортном средстве реализовано на примере подвешенной к комплексу привязного аэростата вращающейся антенны радиолокационной станции следующим образом.
Привязной аэростат 1 прикрепляется к устройству причаливания (условно не показано), расположенному на земной или водной поверхности, кабель-тросом 2. В нижней части аэростата 1 под оболочкой обтекателя 3 установлена несущая форменная конструкция 4, к которой через узлы крепления 5 пристыковано устройство угловой стабилизации подвешенного объекта на транспортном средстве 6 с системами стабилизации подвешенного объекта на транспортном средстве по углам крена α и тангажа β, выполненное в виде форменного основания 7 с узлами крепления 5 и кардановым подвесом в виде шарнирно прикрепленной к основанию 7 наружной рамки 8. Наружная райка 8 шарнирно связана с внутренней рамкой 9. К внутренней рамке 9 жестко прикреплена платформа 10 с пристыкованной, вращающейся от привода 11 антенной радиолокационной станции 12, при этом оси вращения рамок в антенны взаимно перпендикулярны. Привод 11 установлен на платформе 10, ось вращения антенны проходит через центр платформы и совпадает с вертикалью, а две другие оси карданового подвеса совпадают соответственно с продольной и поперечной осями аэростата 1. Между несущими элементами конструкций соответственно основания 7, наружной рамки 8 и внутренней рамки 9 на заданном расстоянии от соответствующих осей вращения, обеспечивающем требуемый вращающий момент, шарнирно, враспор установлены рабочие камеры 13 в 14, 15 и 16 соответствующих пневмоприводов двойного действия, выполненные в виде одно- или многосекционных резинокордных оболочек, герметизированных крышками с кронштейнами крепления. На платформе 10 также установлен двухстепенной прецизионный гироскоп 17, ориентированный в пространстве по крену и тангажу относительно вертикальной оси. На конструкции внутренней части платформы 10 установлены компрессор 18 в ресиверы 19, связанные магистральным пневмоприводом (фиг.1, на остальных фиг. условно не показан) с соответствующим каждому из пневмоприводов 13-16 пневмораспределительным устройством 20, установленным на несущих элементах конструкции внутренней рамки 9, при этом выходы гироскопа 17 по каждой из степеней подвижности подключены через соответствующие сумматор 21 в инвертор 22 к соответствующим преобразовательно-усилительным блокам, выполненным в виде усилителей мощности 23 с электромеханическими преобразователями 24, связанными с соответствующими пневмораспределительными устройствами 20, соединяющими пневмоприводами рабочие камеры пневмоприводов 13-16, образующих два пневмопривода двойного действия, установленных с возможностью углового перемещения платформы 10 относительно основания 7 по углам крена α и тангажа β и ее фиксации с наружной атмосферой и магистральным пневмоприводом. При этом обратная связь по угловому положению платформы 10 относительно основания 7 каждой из стабилизирующих систем (по углам крена α и тангажа β) выполнена в виде кинематически связанных с соответствующими осями вращения наружной и внутренней рамок 8 в 9 потенциометрических датчиков 25.
На фиг. 1 представлена функциональная схема устройства угловой стабилизации подвешенного объекта на транспортном средстве для одной из двух степеней подвижности, например, при повороте системы по углу крена α. Функциональная схема устройства угловой стабилизации подвешенного объекта для другой степени подвижности, например, при повороте системы по углу тангажа β полностью идентична первой и на фиг.1 не показана. На фиг.2-8 условно не показаны сумматор 21 и инвертор 22, магистральный и соединительные пневмопроводы и соответствующая им арматура, а также усилители мощности 23.
Работает устройство угловой стабилизации подвешенного объекта в составе аэростатного радиолокационного комплекса следующим образом.
По команде с пункта управления кабель-трос 2 отпускается и аэростат 1 поднимается на заданную высоту. При этом управление устройством угловой стабилизации подвешенного объекта на транспортном средстве 6 от прецизионного гироскопа 17 и потенциометрических датчиков 25 углового положения платформы 10 с вращающейся антенной радиолокационной станции 12 отключено, а избыточное одинаковое давление в рабочих камерах соответствующих пар пневмоприводов 13 и 14, 15 и 16 обеспечивает требуемую жесткость устройства угловой стабилизации подвешенного объекта на транспортном средстве 6 и фиксацию его углового положения относительно основания 7. После подъема аэростата 1 на заданную высоту по команде с пункта управления производится включение управления устройством угловой стабилизации подвешенного объекта на транспортном средстве 6 от прецизионного гироскопа 17 и потенциометрических датчиков 25. При этом в случае отклонения аэростата 1 с жестко прикрепленным к его несущей ферменной конструкции 4 основанием 7 по углу крена α (фиг.6) прецизионный гороскоп 17 вырабатывает управляющие сигналы, которые через соответствующие сумматор 21, инвертор 22 и усилители мощности 23 подаются на соответствующие электромеханические преобразователи 24, осуществляющие управление положением рабочих органов пневмораспределительных устройств 20. При этом пневмораспределительное устройство 20 пневмопривода 13 соединяет его рабочую камеру с магистральным пневмопроводом и происходит его наполнение из ресивера 19 сжатым газом, поддержание рабочего давления которого осуществляется автоматически периодическим включением компрессора 18 от датчика давления, установленного на магистральном пневмопроводе, а пневмораспределительное устройство 20 пневмопривода 14 соединяет его рабочую камеру с атмосферой и обеспечивает стравливание из нее сжатого газа. В результате происходит согласованное увеличение длины пневмопривода 13 и, соответственно, уменьшение длины пневмопривода 14. При повороте аэростата 1 по углу крена α в обратном направлении происходит, наоборот, увеличение длины пневмопривода 14 и, соответственно, уменьшение длины пневмопривода 13. Согласованное изменение длин пневмоприводов 13 и 14, внутренние торцы которых шарнирно связаны с рычагом внутренней рамки 9 в виде четырехгранной пирамиды, а внешние - с наружной рамкой 8, обеспечивает поворот внутренней рамки 9 относительно наружной рамки 8 и основания 7 на угол α в противоположном от поворота аэростата 1 направлении, но с одинаковой угловой скоростью. Благодаря этому обеспечивается стабилизация пространственного положения платформы 10 и, соответственно, вертикальное направление оси вращения антенны радиолокационной станции 12 независимо от колебаний аэростата 1 по углу крена α.
Аналогично работает устройство угловой стабилизации подвешенного объекта 6 при колебаниях аэростата 1 по углу тангажа β (фиг.8). При этом происходит согласованное увеличение длины пневмопривода 15 и, соответственно, уменьшение длины пневмопривода 16, а при повороте аэростата 1 по углу тангажа β в обратном направлении происходит, наоборот, увеличение длины пневмопривода 16 и, соответственно, уменьшение длины пневмопривода 15. В случае одновременного поворота аэростата 1 по углу крена α и тангажа β происходит одновременная согласованная работа пневмоприводов 13-16, управляемых соответствующими пневмораспределительными устройствами 20 от сигналов, формируемых прецизионным гироскопом 17. При возникновении нештатной ситуации, когда амплитуды угловых колебаний аэростата 1 по крену, тангажу или совместно достигают предельно допустимых значений, в целях исключения выхода из строя устройства угловой стабилизации подвешенного объекта на транспортном средстве 6 управляющие сигналы от прецизионного гироскопа 17 отключаются и дальнейшее управление осуществляется по сигналам от потенциометрических датчиков 25 углового положения платформы 10. При этом пневмораспределительные устройства 20 перекрывают каналы всех рабочих камер пневмоприводов 13-16 в происходит жесткая угловая фиксация платформы 10 с антенной радиолокационной станции 12 относительно основания 7. После уменьшения амплитуды угловых колебаний аэростата 1 по крену, тангажу или совместных до допустимых значений управляющие сигналы от потенциометрических датчиков 25 углового положения платформы 10 отключаются, а управление возобновляется по сигналам от прецизионного гироскопа 17.
Периодически для проведения профилактических работ осуществляют спуск аэростата 1. При этом кабель-трос 2 наматывается на барабан лебедки причального устройства, а устройство угловой стабилизации подвешенного объекта на транспортном средстве 6 работает, как и при подъеме, обеспечивая жесткую угловую фиксацию платформы 10 с антенной радиолокационной станции 12 относительно основания 7.
Регулировкой пневмораспределительных устройств 20 исключается возможность изменения давления в рабочих камерах пневмоприводов 13-16 за допустимые пределы. Электропитание устройства угловой стабилизации подвешенного объекта 6 осуществляется от бортовой энергосистемы.
Предлагаемое устройство угловой стабилизации подвешенного объекта на транспортном средстве 6 позволяет не только повысить точность угловой стабилизации подвешенного объекта на транспортном средстве и защитить его от колебаний и ударных нагрузок в процессе эксплуатации, но и обеспечивать при необходимости угловое наведение вращающейся антенны радиолокационной станции, а также за счет установки соответствующих пар пневмоприводов враспор исключить люфты в их шарнирных соединениях и повысить кинематическую точность системы в целом. Кроме того, применение в предлагаемом устройстве угловой стабилизации подвешенного объекта исполнительных органов в виде пневмоприводов наделяет его следующими присущими им основными преимуществами по сравнению с системами, включающими традиционные гидравлические и электромеханические исполнительные органы: простота конструкции, малая масса, надежность, значительный срок службы и хранения, хорошая готовность к действию и высокая скорость срабатывания, возможность работы в сложных условиях окружающей среды (при значительных изменениях температуры и давления, при радиации и высоких магнитных полях, а также нечувствительности к перегрузкам, при которых происходит остановка устройства без поломок).

Изобретение относится к области оборудования летательных аппаратов. Устройство представляет собой платформу с местами установки объекта, связанную через кардановый подвес с основанием, прикрепленным к нижней части несущей конструкции транспортного средства. Устройство снабжено следящими системами с виброизоляцией, размещенными в кардановом подвесе и предназначенными для одновременного поворота платформы относительно основания по углам крена и тангажа. Предусмотрены пневмоприводы с рабочими камерами в виде резинокордных оболочек. Изобретение направлено на повышение точности угловой стабилизации и защиты от колебаний и ударных нагрузок в процессе эксплуатации. 8 ил.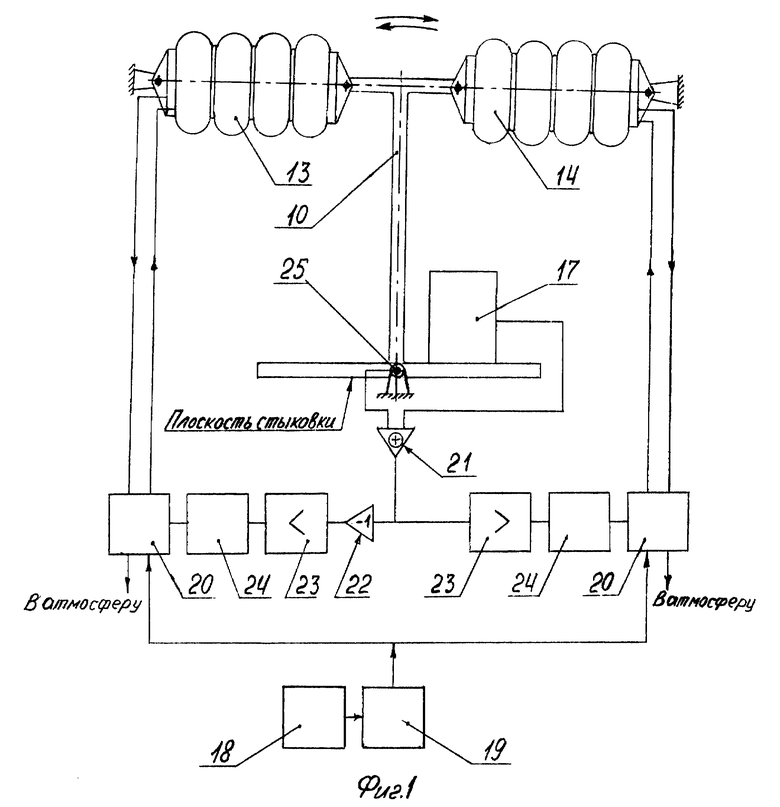
Устройство угловой стабилизации подвешенного объекта на транспортном средстве, содержащее платформу с местами установки объекта с одной стороны и узлы крепления подвески к нижней части несущей конструкции транспортного средства с другой, отличающееся тем, что оно снабжено источником сжатого газа, первой системой, имеющей датчик углового отклонения упомянутой платформы от вертикали по крену, второй системой, имеющей датчик углового отклонения от вертикали по тангажу, виброизоляцией для упомянутых первой и второй систем, кардановым подвесом, имеющим наружную и внутреннюю рамки, основанием, имеющим узлы крепления к упомянутой нижней части и жестко прикрепленным к упомянутой внутренней рамке с возможностью одновременного поворота платформы относительно основания по углам крена и тангажа, при этом каждая из упомянутых систем имеет пневмораспределительное устройство, пневмопривод двойного действия, имеющий рабочие камеры из резинокордных оболочек, соединенные с упомянутым пневмораспределительным устройством, магистраль к упомянутому источнику газа, выходы обоих датчиков углового отклонения от вертикали подключены через сумматор и инвертор к соответствующему преобразовательно-усилительному блоку, предназначенному для связи с упомянутым пневмораспределительным устройством, упомянутые оболочки установлены враспор между внутренней и наружной рамками карданового подвеса, а также между наружной рамкой карданового подвеса и упомянутым основанием соответственно, при этом оба упомянутых датчика предназначены для обратной связи углового положения платформы относительно упомянутого основания.
| Устройство для радиолокационного картографирования ледового покрова | 1991 |
|
SU1803343A1 |
| US 43665770 А, 28.12.1982 | |||
| Аналоговое запоминающее устройство | 1978 |
|
SU771729A1 |

