Предлагаемые технические решения относятся к области радиолокации и могут быть использованы для распознавания радиолокационных объектов.
Известен способ распознавания объектов с использованием в качестве признака распознавания преобразования вида:
где S - величина, характеризующая степень корреляции амплитуд принятых импульсов;
Am - амплитуда принятого РЛС m-го импульса, отраженного от радиолокационного объекта;
Up - порог распознавания.
[1. Атаянц Б.А., Румянцев В.П. Эффективность различения при некоторых инвариантных преобразованиях сигналов. Радиоэлектроника, Известия вузов MB и ССО СССР, 1983, т.26, №9, с.58, формула (3)].
Способ распознавания основан на том, что интенсивность и характер флуктуации амплитуд отраженных импульсов для разных типов объектов различаются. Поэтому различной для разных объектов будет и величина S. Положительным свойством преобразования (1) является инвариантность величины S относительно средней эффективной поверхности рассеяния (ЭПР) объекта.
Недостатком данного способа распознавания является низкая вероятность правильного распознавания и ухудшение распознавания при изменении ракурса, скорости и дальности объекта (изменении отношения сигнал/шум).
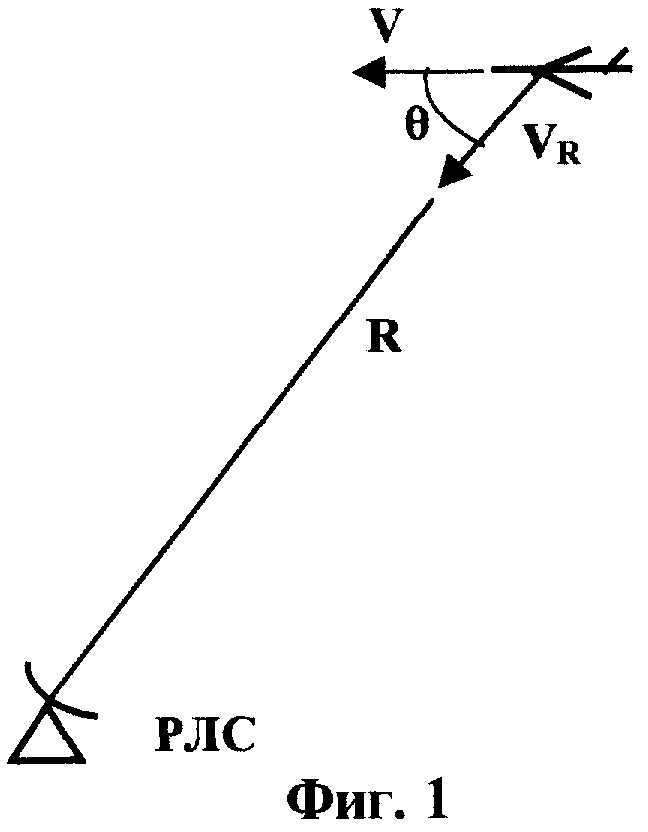
Под ракурсом здесь и далее понимается угол θ между линией визирования РЛС - объект и вектором путевой скорости V (или продольной осью объекта в направлении движения), фиг.1. Ракурс объекта определяется по формуле
где VR - радиальная составляющая вектора путевой скорости V.
Известно устройство распознавания объектов по патенту ФРГ №1541652 [2. Небабин В.Г., Сергеев В.В. Методы и техника радиолокационного распознавания. М.: Радио и связь, 1984, с.30-31], в котором реализовано распознавание объектов по амплитудным и частотным флуктуациям принятых РЛС импульсов. Устройство содержит РЛС, частотный анализатор, два запоминающих устройства (ЗУ) эталонов, два устройства сравнения и три индикатора.
Устройство работает следующим образом. Амплитуды принятого сигнала с выхода РЛС поступают одновременно на входы первого индикатора, частотного анализатора и вход первого устройства сравнения, в котором производится сравнение амплитудных флуктуаций сигнала с выхода РЛС с эталонными флуктуациями ряда радиолокационных объектов, информация о которых хранится в первом ЗУ эталонов. При совпадении сравниваемых величин амплитудных флуктуаций в первом устройстве сравнения с одним из эталонных на втором индикаторном устройстве отображается тип радиолокационного объекта. В частотном анализаторе определяется спектр выходного сигнала РЛС. Спектральные составляющие сравниваются во втором устройстве сравнения с эталонными, принадлежащими ряду радиолокационных объектов. Информация об эталонных спектрах хранится во втором ЗУ эталонов. При совпадении спектральных составляющих принятого сигнала и одного из ряда заданных эталонных спектров объектов на третьем индикаторе отображается тип радиолокационного объекта.
Недостатком устройства по патенту ФРГ №1541652 является ухудшение распознавания при изменении ракурса объекта, его скорости и дальности.
Наиболее близким к заявляемому способу является способ распознавания радиолокационных объектов с использованием сигнала в виде пачки зондирующих импульсов [3. Трубицын Е.Г., Ермоленко В.П. Алгоритмы распознавания воздушных целей. Зарубежная радиоэлектроника, 1992, №10, с.82-84]. Суть способа заключается в следующем.
РЛС излучает пачку М зондирующих импульсов. Производится прием отраженных от объекта импульсов и измерение амплитуд Um каждого m-го импульса. На основе измерения амплитуд вычисляется величина ρ, которая характеризует степень корреляции флуктуации амплитуд отраженных от объекта импульсов

Величина ρ сравнивается с порогом распознавания Upij, индексы i и j обозначают номера распознаваемых типов объектов:
i=1, ..., N; j=1, ...,N; i≠j, N - количество распознаваемых типов объектов.
По результатам сравнения принимается решение о принадлежности объекта к определенному типу.
Распознавание с использованием формулы (2) может проводиться как при перестройке несущей частоты зондирующих импульсов, так и при соответствующем временном разносе импульсов на одной несущей частоте, а также при использовании того и другого способов зондирования вместе. Это следует из известной эквивалентности усреднения по времени и усреднения по несущей частоте [4. Ширман Я.Д. и др. Методы радиолокационного распознавания и их моделирование. Радиолокация и радиометрия, вып.III, 2000 г., стр.8-9, рис.3, 4, 5, 6; стр.9, левый столбец, второй абзац сверху]. Поэтому далее для предлагаемых технических решений не имеет значения, какая пачка зондирующих импульсов используется - на одной несущей частоте с временным разносом импульсов, с перестройкой несущей частоты от импульса к импульсу или с применением того и другого способов зондирования совместно.
Известно, что амплитудные (при временном разносе импульсов) и амплитудные частотные (при перестройке несущей частоты) флуктуации отраженного от объекта радиолокационного сигнала зависят как от сложности объекта (числа и взаимного расположения локальных центров отражения и их отражательных характеристик), так и от параметров и динамики его движения относительно РЛС: ракурса, скорости движения, дальности, а также рыскания по курсу, крену и тангажу [2. стр.131-133], [5. Справочник по радиолокации. Под ред. М.Сколника, т.1, M., Советское радио, 1976, глава 10, стр.398-400, стр.416-418, стр.421 (первый абзац сверху)].
Недостатком наиболее близкого известного технического решения (способа-прототипа) является ухудшение распознавания при изменении ракурса, скорости полета объекта и его дальности. Это видно, в частности, из рис.2 на стр.83 в [3], где показаны зависимости вероятностей правильного распознавания "от величины углового сектора изменения азимутальной ориентации целей" (имеются в виду изменения ракурса объекта в азимутальной плоскости).
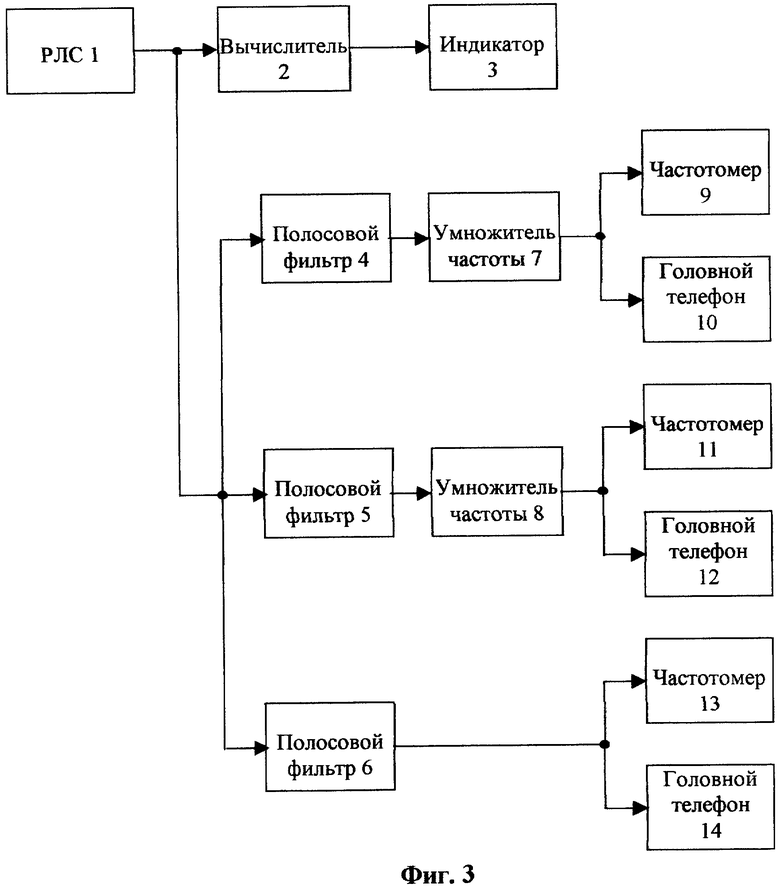
Наиболее близким устройством к заявляемому техническому решению является устройство по патенту США №3733603 [2, с.133-134, рис.4.22], содержащее РЛС 1, вычислитель 2 (ЭВМ), индикатор 3, полосовые фильтры 4, 5, 6, умножители частоты 7, 8, частотомеры 9, 11, 13 и головные телефоны 10, 12, 14, причем выход РЛС 1 соединен параллельно с входами каждого из полосовых фильтров 4, 5, 6 и входом вычислителя 2, выход которого подключен к входу индикатора 3; выходы полосовых фильтров 4 и 5 соединены соответственно с входами умножителей частоты 7 и 8, выход умножителя частоты 7 подключен параллельно к входу частотомера 9 и входу головного телефона 10, выход умножителя частоты 8 подключен параллельно к входу частотомера 11 и входу головного телефона 12, выход полосового фильтра 6 подключен параллельно к входу частотомера 13 и входу головного телефона 14.
Устройство работает следующим образом. Отраженные от объекта импульсы принимаются РЛС 1 и с ее выхода и поступают одновременно на входы трех полосовых фильтров 4, 5, 6. Каждый из фильтров 4, 5, 6 настроен на определенные флуктуации амплитуд отраженных импульсов, вызванных перемещением объекта по траектории, колебаниями корпуса объекта и "турбинной" модуляцией. Поступающие импульсы, вызванные перемещением объекта по траектории и колебаниями его корпуса, следуют с частотами от единиц до десятков герц. Поэтому для восприятия их ухом оператора импульсы с выходов фильтров 4 и 5 поступают соответственно на умножители частоты 7 и 8, после чего подаются на частотомеры 9, 11 и головные телефоны 10, 12. Импульсы с выхода фильтра 6, соответствующие "турбинной" модуляции, подаются непосредственно на частотомер 13 и головной телефон 14. По результатам анализа характера флуктуации поступающих импульсов оператор определяет тип объекта. Одновременно с выхода РЛС 1 импульсы поступают на вычислитель 2 для автоматического распознавания. С выхода вычислителя 2 результаты распознавания поступают для отображения на вход индикатора 3.
Таким образом, решаемой задачей (техническим результатом) предлагаемого способа является повышение вероятности правильного распознавания радиолокационных объектов за счет снижения влияния на результаты распознавания таких параметров, как ракурс, скорость и дальность объекта.
Технический результат предлагаемого устройства заключается в расширении арсенала имеющихся средств для распознавания объектов.
Технический результат достигается тем, что в известном способе, включающем излучение сигнала в виде пачки М зондирующих импульсов с постоянным временным разносом между импульсами и/или с перестройкой несущей частоты от импульса к импульсу, прием пачки отраженных от объекта импульсов, измерение амплитуды Um каждого принятого РЛС m-го импульса, вычисление величины ρ, характеризующей степень корреляции флуктуации амплитуд принятых импульсов, по формуле
где Um - амплитуда принятого РЛС m-го отраженного от объекта импульса;
М - количество зондирующих импульсов в пачке,
сравнение величины ρ с порогами распознавания и принятие решения о типе объекта, согласно изобретению для определения порогов распознавания дополнительно измеряют дальность до объекта R, радиальную составляющую вектора путевой скорости объекта VR, модуль вектора путевой скорости объекта V, определяют ракурс объекта

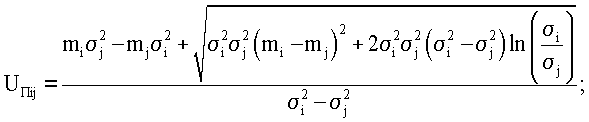
и вычисляют пороги распознавания UПij по формуле

где индексы i и j обозначают номера распознаваемых типов объектов: i=1, ..., N; j=1, ..., N; i≠j, N - количество распознаваемых типов объектов;
mi,  и mj,
и mj,  - соответственно математическое ожидание и дисперсия величины ρ, вычисляемые для i-го и j-го типов объектов
- соответственно математическое ожидание и дисперсия величины ρ, вычисляемые для i-го и j-го типов объектов
где
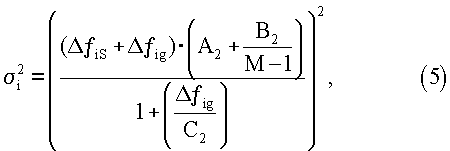
А1, В1, С1, А2, В2, С2 - аппроксимирующие коэффициенты, которые выбираются в зависимости от используемого диапазона радиоволн; в сантиметровом диапазоне радиоволн А1=0.025, B1=0.012, С1=140, А2=0.004, В2=0.021, С1=120;
ΔƒiS - ширина амплитудного спектра отраженного сигнала, обусловленная случайным рысканием объекта в процессе полета и задаваемая на основе априорных знаний о i-м типе распознаваемых объектов;
Δƒig - ширина амплитудного спектра отраженного сигнала, обусловленная динамикой полета и ракурсом объекта

Li - средняя геометрическая протяженность объекта i-го типа, которая задается на основе априорных знаний о данном типе объектов;
λ - средняя длина волны зондирующих импульсов пачки;
R - дальность до объекта.
Технический результат достигается также тем, что в известное устройство распознавания, содержащее последовательно соединенные РЛС 1, вычислитель 2 и индикатор 3, согласно изобретению введены второй (координатный) выход РЛС 1, который соединен со вторым входом вычислителя 2, и запоминающее устройство (ЗУ) 4, вход которого соединен со вторым выходом вычислителя 2, а выход подключен к третьему входу вычислителя 2.
Изобретение иллюстрируется следующими чертежами:
Фиг.1 - движение объекта с ракурсом θ относительно РЛС.
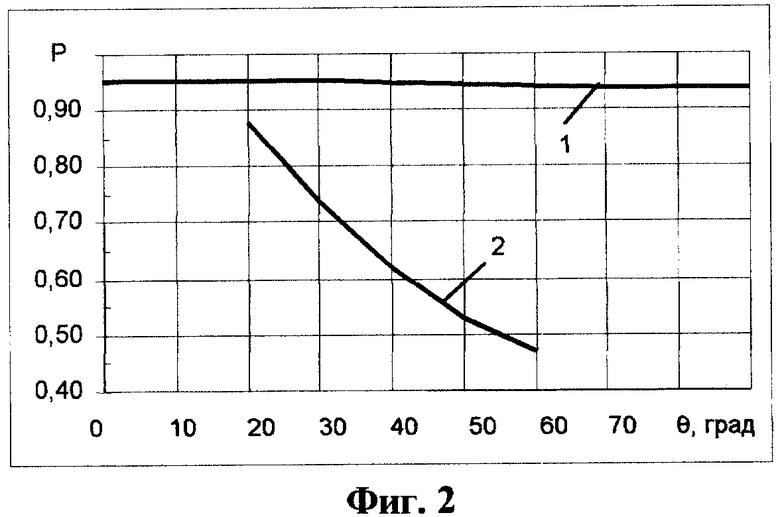
Фиг.2 - зависимости средней вероятности правильного распознавания от ракурса наблюдаемого объекта: кривая 1 - предлагаемый способ; кривая 2 - способ-прототип (кривая 2 получена путем усреднения вероятностей, представленных в [3], стр.83, рис.4).
Фиг.3 - структурная схема устройства-прототипа.
Фиг.4 - структурная схема предлагаемого устройства, реализующего заявленный способ.
Из сопоставления зависимостей средних вероятностей правильного распознавания 1 и 2 на фиг.2 видно, что заявленный по предлагаемому способу технический результат достигается.
Предлагаемое устройство распознавания объектов, реализующее заявленный способ, содержит РЛС 1, вычислитель 2, индикатор 3 и ЗУ 4, причем первый (сигнальный) выход РЛС 1 соединен с первым входом вычислителя 2, первый выход которого подключен к входу индикатора 3, второй (координатный) выход РЛС 1 соединен со вторым входом вычислителя 2, второй выход которого соединен с входом ЗУ 4, выход которого подключен к третьему входу вычислителя 2.
В качестве РЛС 1 может быть использована радиолокационная станция, описанная в книге "Теоретические основы радиолокации", под ред. Я.Д.Ширмана. - М.: Сов. радио, 1970, стр.221.
Вычислитель 2 может быть выполнен на стандартном вычислительном процессоре типа Pentium или Celeron (М.Гук. Аппаратные средства IBM PC. - СПб.: Издательский дом "Питер", 2002, с.227-228).
Вычислитель 2 работает по следующему алгоритму;
- расчет величины ρ, характеризующей степень корреляции флуктуации амплитуд принятых РЛС импульсов;
- вычисление математических ожиданий и дисперсий величины ρ для распознаваемых типов радиолокационных объектов в соответствии с эталонами, поступающими из ЗУ 4, и координатной информацией, поступающей из РЛС 1;
- определение порогов распознавания между i-м и j-м распознаваемыми типами радиолокационных объектов;
- сравнение величины ρ с порогом распознавания и принятие решения о типе радиолокационного объекта по предлагаемому способу.
В качестве индикаторного устройства 3 может быть использован классический дисплей на электронно-лучевой трубке (М.Гук. Аппаратные средства IBM PC. СПб.: Издательский дом "Питер", 2002, с.498-499).
Цифровое ЗУ 4 выполнено на стандартных микросхемах (Интегральные микросхемы. Справочник под ред. Т.В.Тарабрина. - М.: Радио и связь, 1984).
ЗУ 4 содержит эталоны ширины спектра амплитудных флуктуаций сигналов, обусловленных случайными рысканиями объектов в процессе полета, и эталоны средних длин распознаваемых типов объектов.
Работа предлагаемого устройства происходит следующим образом. С сигнального выхода 1 РЛС 1 на первый вход вычислителя 2 поступают амплитуды принятых РЛС 1 импульсов, а с координатного выхода 2 РЛС 1 на второй вход вычислителя 2 поступают значения дальности R и скоростей: VR - радиальной скорости и V - модуля вектора путевой скорости. В вычислителе 2 осуществляется вычисление величины ρ, характеризующей степень корреляции флуктуации амплитуд принятой РЛС пачки импульсов по формуле
где Um - амплитуда m-го импульса принятой РЛС пачки;
М - количество зондирующих импульсов.
В вычислителе 2 также определяется значение ракурса объекта по формуле , которое поступает со второго выхода вычислителя 2 на вход ЗУ 4. В зависимости от значения ракурса объекта с выхода ЗУ 4 на третий вход вычислителя 2 поступают соответствующие эталоны ширины спектра амплитудных флуктуации ΔƒiS, обусловленных случайным рысканием объекта в процессе полета, а также эталоны средней геометрической протяженности Li распознаваемых типов объектов.
Далее в вычислителе 2 производится распознавание типов объектов по заявляемому способу:
- вычисление ширины спектра амплитудных флуктуации Δƒig, обусловленных динамикой полета и ракурсом объекта по формуле:
где λ - средняя длина волны пачки зондирующих импульсов;
- вычисление математических ожиданий и дисперсий величины ρ для распознаваемых типов радиолокационных объектов по формулам:


где A1, B1, C1, A2, B2, C2 - аппроксимирующие коэффициенты, которые выбираются в зависимости от используемого диапазона радиоволн;
i=1, ..., N; j=1, ..., N; i≠j;
N - количество распознаваемых типов объектов;
- определение порогов UПij распознавания между i-м и j-м типами радиолокационных объектов по формуле
- сравнение величины ρ, характеризующей степень корреляции флуктуаций амплитуд принятой РЛС пачки импульсов с порогом распознавания

- принятие решения о типе радиолокационного объекта.
С первого выхода вычислителя 2 решение о типе объекта передается для отображения на вход индикатора 3.
Таким образом, предлагаемый способ позволяет повысить вероятность правильного распознавания объектов за счет более точного определения порогов распознавания, учитывающих такие параметры, как дальность до объекта R, радиальную составляющую вектора путевой скорости объекта VR, модуль вектора путевой скорости объекта V и ракурс объекта θ. В заявляемом устройстве при реализации предлагаемого способа достигаются более широкие возможности по распознаванию объектов.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ распознавания радиолокационных объектов | 2017 |
|
RU2667516C1 |
| СПОСОБ РАСПОЗНАВАНИЯ РАДИОЛОКАЦИОННЫХ ОБЪЕКТОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2317568C1 |
| МНОГОПОЛЯРИЗАЦИОННЫЙ СПОСОБ РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ | 1998 |
|
RU2139553C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО РАСПОЗНАВАНИЯ ГРУППЫ ОДНОТИПНЫХ МАЛОРАЗМЕРНЫХ БЕСПИЛОТНЫХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2021 |
|
RU2787843C1 |
| РЛС РАСПОЗНАВАНИЯ ЦЕЛЕЙ | 1996 |
|
RU2095825C1 |
| УСТРОЙСТВО ИДЕНТИФИКАЦИИ ВОЗДУШНЫХ ОБЪЕКТОВ ПО СТРУКТУРЕ ДАЛЬНОСТНОГО ПОРТРЕТА | 2012 |
|
RU2513041C2 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО КЛАССИФИКАЦИИ ВИБРИРУЮЩИХ ЛЕТАТЕЛЬНЫХ АППАРАТОВ С ТРАЕКТОРНЫМИ НЕСТАБИЛЬНОСТЯМИ ПОЛЕТА В ПРИЗЕМНЫХ СЛОЯХ АТМОСФЕРЫ | 2009 |
|
RU2407031C1 |
| РАДИОЛОКАЦИОННАЯ СТАНЦИЯ С ПОИМПУЛЬСНОЙ ПЕРЕСТРОЙКОЙ НЕСУЩЕЙ ЧАСТОТЫ, НЕЙРОСЕТЕВЫМ РАСПОЗНАВАНИЕМ ОБЪЕКТОВ И ИНВЕРСНЫМ СИНТЕЗИРОВАНИЕМ АПЕРТУРЫ АНТЕННЫ | 2011 |
|
RU2439611C1 |
| РАДИОЛОКАЦИОННОЕ РАСПОЗНАЮЩЕЕ УСТРОЙСТВО | 1996 |
|
RU2095824C1 |
| Способ обнаружения воздушных объектов при зондировании сверхкороткими радиоимпульсами | 2022 |
|
RU2791275C1 |
Предлагаемые изобретения могут быть использованы в области радиолокационной техники для распознавания радиолокационных объектов. Достигаемым техническим результатом является повышение вероятностей правильного распознавания радиолокационных объектов за счет применения порогов распознавания, учитывающих такие параметры, как дальность до объекта, радиальная составляющая вектора путевой скорости, модуль вектора путевой скорости и ракурс объекта. Указанный результат достигается за счет того, что для определения порогов распознавания дополнительно измеряют дальность до объекта, радиальную составляющую вектора путевой скорости объекта, модуль вектора путевой скорости объекта, определяют ракурс объекта и с помощью вычислителя, соединенного с координатным выходом РЛС и запоминающим устройством, вычисляют пороги распознавания. 2 н.п. ф-лы, 4 ил.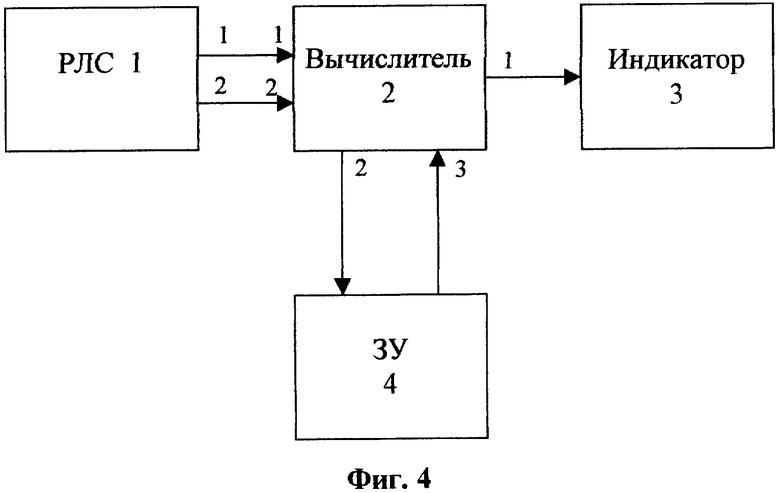

 ,
,
где Um - амплитуда принятого РЛС m-го отраженного от объекта импульса;
М - количество зондирующих импульсов в пачке,
сравнение величины ρ с порогами распознавания и принятие решения о типе объекта, отличающийся тем, что для определения порогов распознавания дополнительно измеряют дальность до объекта R, радиальную составляющую вектора путевой скорости объекта VR, модуль вектора путевой скорости объекта V, определяют ракурс объекта
и вычисляют пороги распознавания UПij по формуле
 ,
,
где индексы i и j обозначают номера распознаваемых типов объектов; i=1, ..., N; i≠j;
N - количество распознаваемых типов объектов;
mi,  и mj,
и mj,  - соответственно математическое ожидание и дисперсия величины ρ, вычисляемые для i-го и j-го типов объектов
- соответственно математическое ожидание и дисперсия величины ρ, вычисляемые для i-го и j-го типов объектов
 ,
,
 ,
,
где А1, В1, С1, А2, В2, С2 - аппроксимирующие коэффициенты, которые выбираются в зависимости от используемого диапазона радиоволн;
Δfis - ширина амплитудного спектра отраженного сигнала, обусловленная случайным рысканием объекта в процессе полета и задаваемая на основе априорных знаний о i-м типе распознаваемых объектов;
Δfig - ширина амплитудного спектра отраженного сигнала, обусловленная динамикой полета и ракурсом объекта
 ,
,
Li - средняя геометрическая протяженность объекта i-го типа, которая задается на основе априорных знаний о данном типе объектов;
λ - средняя длина волны зондирующих импульсов пачки;
R - дальность до объекта.
| ТРУБИЦЫН Е.Г., ЕРМОЛЕНКО В.П | |||
| Алгоритмы распознавания воздушных целей | |||
| Зарубежная радиоэлектроника, 1992, №10, с.82-84 | |||
| US 3733603 А, 15.05.1973 | |||
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 1995 |
|
RU2095822C1 |
| РАДИОЛОКАЦИОННОЕ УСТРОЙСТВО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ЦЕЛЕЙ | 1995 |
|
RU2079857C1 |
| УСТРОЙСТВО ЛОГИЧЕСКОГО РАСПОЗНАВАНИЯ ВОЗДУШНЫХ ОБЪЕКТОВ | 1998 |
|
RU2149420C1 |
| Способ изготовления искусственной замши | 1934 |
|
SU48132A1 |
| ЕР 1022581 А2, 26.07.2000 | |||
| US 6140982 А, 31.10.2000. | |||

