Данное изобретение относится к области ракетно-космической техники и может быть использовано для повышения эффективности работы систем наблюдения за космической обстановкой, например, системы контроля космического пространства и системы средств навигации.
Практика космической деятельности показала, что в перспективе роль космической компоненты будет неуклонно возрастать, а орбитальные средства будут активно использоваться в целях социально-экономического развития, безопасности и национальной обороны.
Требуют повышения эффективности контроля и наблюдения разрабатываемые сложные многофункциональные системы, например, такие как «Многофункциональная космическая система автоматизированного управления и оперативного контроля (мониторинга) критически важных объектов и территорий Союзного государства «Россия-Беларусь», заявка на изобретение №2006143879/09 от 13.12.2006 (RU).
Известен как аналог вариант создания инструментальных средств имитационного моделирования процесса интегрированного функционирования космической системы наблюдения и комплекса ракетного оружия на морском театре военных действий. Инструментарий представляет собой информационно-моделирующую систему комплекса средств наблюдения и воздействия [Использование современных информационных технологий для моделирования применения космических средств. «Военная мысль». №8. 2004 г., стр.76-80].
Одним из важнейших факторов, влияющих на эффективность функционирования регулярных систем космических аппаратов (КА), требующих постоянного контроля и управления, является стабильность их орбитальных структур. Под стабильностью орбитальных структур КА понимается сохранение взаимных положений в пространстве всех КА, входящих в систему, в заданных пределах по координатам и времени.
Пространственные орбитальные структуры систем КА трехмерны и динамичны. Количество космических объектов постоянно увеличивается. Поэтому становится все более актуальной проблема создания наглядных форм оперативного представления и прогнозирования взаимного положения КА в космических системах и группировках на основе точного и быстрого определения их координат.
Известен патент «Способ определения параметров орбит геостационарного спутника» RU №2313104, заключающийся в том, что выполняют измерения наклонной дальности от наземной станции до геостационарного спутника в сеансах на протяжении несколько суток, делят полученную совокупность измерений на две части - обучаемую и контрольную, делят определяемые параметры спутника в плоскости орбиты - внутриплоскостные и положение этой плоскости внеплоскостные, производят серию оценок внутриплоскостных параметров орбиты статистической обработкой измерений из обучаемой совокупности при различных фиксированных значениях внеплоскостных параметров и рассчитывают соответствующие величины отклонений значений измерений из контрольной части от расчетных значений измерений из контрольной совокупности, после чего осуществляют выбор оценок параметров орбиты геостационарного спутника, для который сумма квадратом величины отклонений значений из контрольной совокупности является минимальной.
Способ позволяет увеличить точность и информативность состояния КА на геостационарной орбите и сочетается с существующими тенденциями развития управления полетом геостационарных спутников.
Однако данный способ обеспечивает отображение баллистического состояния группировки КА только на геостационарной орбите и не отвечает требованиям выполнения оперативного контроля за орбитальной группировкой КА в околоземном пространстве из-за недостаточного охвата номенклатуры космических объектов и невысокой динамичности измерений.
Известен патент «Способ определения координат космического объекта» RU №2319171.
Способ относится к области траекторных измерений параметров орбит подвижных космических объектов на фоне звездного неба и обеспечивает повышение точности определения координат этих объектов. Это достигается тем, что угловые измерения координат космических объектов пересчитываются во вторую экваториальную систему координат путем привязки космических объектов к каталожным звездам, координаты которых известны с высокой точностью.
Недостатком предлагаемого способа является то, что метод прямого пересчета линейных координат, полученных в измерительной системе оптико-электронного прибора, в угловые координаты второй экваториальной системы координат обеспечивает повышение точности измерения, но в рамках данного способа отсутствует пересчет координат в обобщенный образ группировки космических объектов, удобный для восприятия и обработки информации оператором.
Решение, защищенное указанным выше патентом RU №2319172, выбрано в качестве прототипа.
Целью предлагаемого изобретение является повышение оперативности обработки информации о состоянии группировки КА в космическом пространстве на основе пересчета их координат для представления в виде, наиболее удобном для восприятия и обработки операторами системы контроля космического пространства и другими пользователями.
Сущность предлагаемого изобретения заключается в использовании в системах контроля космической обстановки способа представления информации о космической группировке, разнообразной по типам КА, количеству КА, составляющих группировку, их баллистическому построению в виде наглядного двумерного изображения, свернутой с помощью пересчета их координат и приведения внутриплоскостных отклонений положений КА от расчетных к единой условной орбитальной системе координат и приведения характеристик положения плоскостей реальных орбит КА в пространстве - к двумерному графику.
Способ отображения баллистического состояния орбитальной группировки космических аппаратов для оперативного контроля и управления в системе контроля космического пространства заключается в том, что параметры движения космического аппарата в орбитальной группировке представляют в аналитическом и геометрическом виде относительно сопровождающей его условной орбитальной системы координат (УОСК), движущейся по круговой орбите с радиусом, равным средней расчетной величине большой полуоси орбит всех космических аппаратов системы, и привязанной к исходному времени и аргументу широты, а взаимное расположение круговых орбит, по которым движутся УОСК, и привязка движений УОСК по времени соответствуют расчетным теоретическим характеристикам орбитальной структуры группировки космических аппаратов, прогнозируемым на момент времени, относительно которого осуществляется контроль, причем для космических аппаратов, движущихся в одной плоскости, вводится единая расчетная круговая орбита, на которой движение космического аппарата отмечают идентифицирующей меткой, а для одновременного представления космических аппаратов, движущихся во всех плоскостях, УОСК этих космических аппаратов совмещают на экране устройства оператора для отображения в единой системе космической обстановки.
По предлагаемому способу с помощью поисковой системы оператора в единой системе отображения космической обстановки на экран оператора выводят по запросу оператора выборку отображений космических аппаратов, имеющих контролируемые параметры плоскостей орбиты и орбитального движения.
При таком способе отображения отклонения КА от штатного движения различные маневры и другие нарушения структуры орбитальной группировки становятся легко заметными для оператора.
Такое преобразование позволяет отображать на одном экране значительное число наблюдаемых космических объектов. А дополнительная информация (о типе КА, государства регистрации КА, технических данных и т.п.) при кодировании точек, изображающих КА на экране с помощью индикаторов, создает оператору условия для быстрого и эффективного принятия решения по результатам контроля космического пространства.
Кроме этого, оператор имеет возможность управлять количеством выводимых на экран объектов по их типам и другой идентифицирующей информации с помощью запросов из массива расчетных данных по параметрам КА.
Предлагаемый способ может быть интегрирован с устройствами оптико-электронного комплекса для контроля космического пространства. Например, с использованием опорно-поворотного устройства для телескопов, изготавливаемого ОАО "Златоустовский машиностроительный завод" (разработчики - ОАО "НПК "Системы прецизионного приборостроения" (Москва), ОАО "Конструкторское бюро специального машиностроения" (Санкт-Петербург) и Санкт-Петербургский Университет информационных технологий, механики и оптики).
Для реализации предлагаемого способа используются штатные методы определения координат орбит КА. (Основы теории полета космических аппаратов. Под ред. Г.С.Нариманова. М.: Машиностроение, 1972, П.Е.Эльясберг. Определение движения по результатам измерений. Главная редакция физико-математической литературы издательства, М.: Наука, 1976)
Затем орбитальное движение каждого спутника, входящего в орбитальную группировку КА, представляется в аналитическом и геометрическом виде относительно сопровождающей его условной орбитальной системы координат (УОСК), движущейся по круговой орбите с радиусом, равным средней расчетной величине большой полуоси орбит всех КА системы. Движение начала УОСК по этой круговой орбите привязывается ко времени моментом t0 с аргументом широты ω0.
Взаимное расположение круговых орбит, по которым движутся УОСК, и привязка движений УОСК по времени соответствуют расчетным теоретическим характеристикам орбитальной группировки КА, прогнозируемым на момент времени, относительно которого осуществляется контроль. Для КА, которые в проектной структуре системы должны двигаться в одной плоскости, вводится единая расчетная круговая орбита. Движение по ней в УОСК для каждого КА различается только моментами прохождения заданных точек (или точки).
Для одновременного представления и контроля взаимного положения во всех плоскостях КА, образующих орбитальную группировку КА, координаты в УОСК всех КА совмещаются на экранах устройств отображения в единой орбитальной системе координат (ЕОСК).
Отклонения параметров положения плоскостей реальных орбит КА в пространстве от расчетных значений характеризуются разностями величин наклонений и прямых восхождений восходящих узлов реальных и расчетных орбит.
Баллистическое построение орбитальной группировки КА описывается элементами их орбиты - величинами, полностью определяющими положение и скорость точки, движущейся по кеплеровой орбите в заданный момент времени.
Матрица для расчета для заданных моментов времени оскулирующих элементов круговых орбит, по которым движутся УОСК для всех КА, системы имеет вид:
 ,
,  ,
,  ,
,  ,
, 
……………………………………
,  ,
,  ,
,  ,
, 
……………………………………
 ,
,  ,
,  ,
,  ,
, 
где Ω0 - прямое восхождение узла орбиты;
i0 - наклонение плоскости орбиты;
ω0 - угловое расстояние от узла до перицентра орбиты;
t0 - время прохождения перицентра орбиты;
a0 - большая полуось орбиты.
Нижний индекс у параметров матрицы - 0 - означает его величину в начальный момент времени.
Нижний индекс n - означает номер КА.
Для кластеров КА, движущихся в одной плоскости, параметры в
столбах равны между собой (i0, ω0, t0, a0) или различаются на постоянную величину (Ω0,  ).
).
Движение орбитальной группировки КА прогнозируют на заданный момент времени на основе параметров реального движения КА и представляют в виде матрицы следующего вида:
 ,
,  ,
,  ,
,  ,
,  , e
, e
……………………………………
 ,
,  ,
,  ,
,  ,
,  , ei
, ei
……………………………………
 ,
,  ,
,  ,
,  ,
,  , e
, e
где Ωi - долгота восходящего узла орбиты на i-м витке (1<i<n);
ii - наклонение плоскости орбиты на i-м витке (1<i<n);
ωi - угловое расстояние от узла до перицентра орбиты на i-витке (1<i<n);
tni - время прохождения перигея орбиты на i-м витке (1<i<n);
ai - большая полуось орбиты на i-м витке (1<i<n);
ei - эксцентриситет орбиты на i-м витке (1<i<n).
Оперативные данные параметров орбитальной группировки КА в эталонной динамической матрице пересчитывают из прямоугольных координат (X, Y, Z) для каждого КА в координаты условной орбитальной системы (УОСК) в функции времени t.
Матрицу параметров орбитальной группировки КА в УОСК используют для формирования когнитивного образа совокупного движения элементов группировки и отображения ситуации в космическом пространстве на экране.
Для этого рассчитывают кривые, характеризующие расчетное и фактическое движения каждого КА, с присвоением КА цветных, геометрических, символьных идентификаторов.
Так в обобщенный образ баллистического состояния орбитальной группировки КА входят:
эталонный (расчетный) след движения КА по расчетной орбите в расчетных положениях;
реальная (фактическая) траектория КА;
отображения параметров движения КА, например по высоте;
отображения положения КА на эталонном (расчетном) следе и траектории отклонения от него.
Сущность изобретения иллюстрируют фигуры:
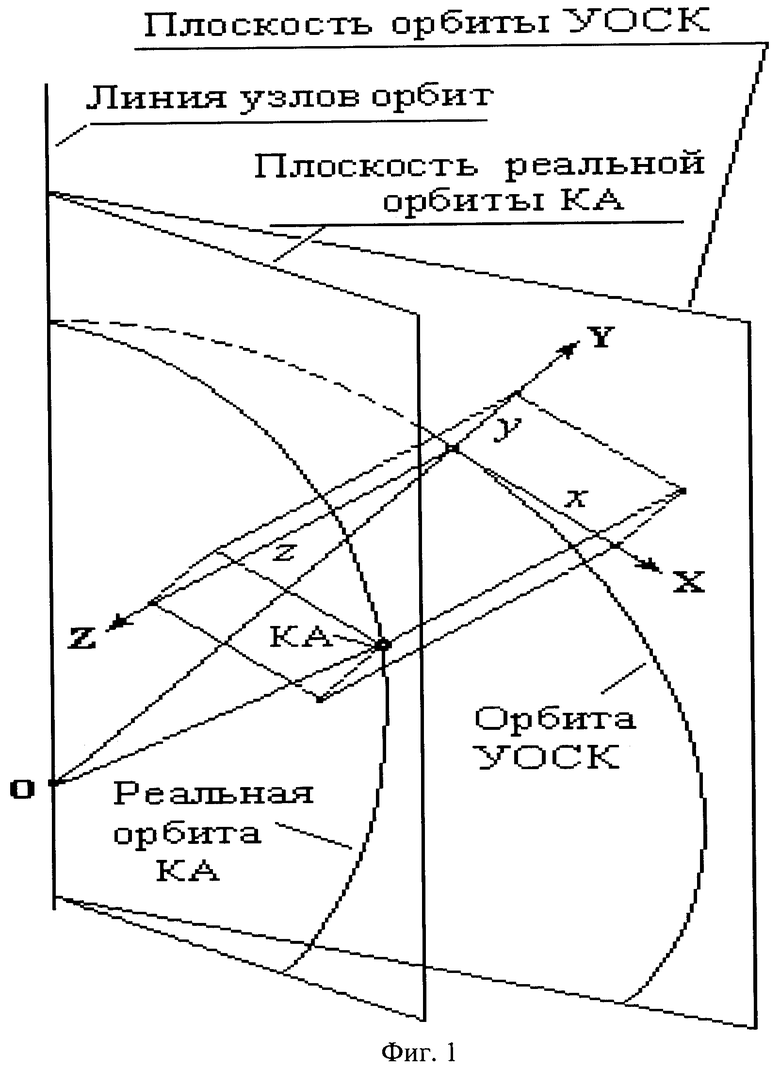
фиг.1 - перевод координат реальной орбиты КА в прямоугольные координаты в условной орбитальной системе координат;
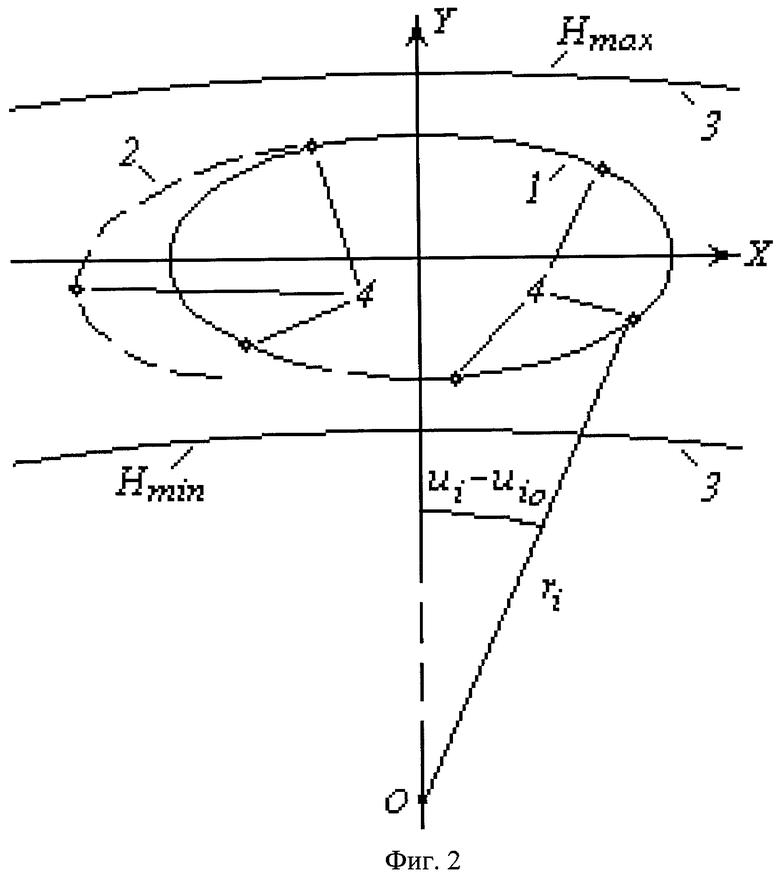
фиг.2 - траектории, отображающие расчетное и фактическое движения КА в УОСК;
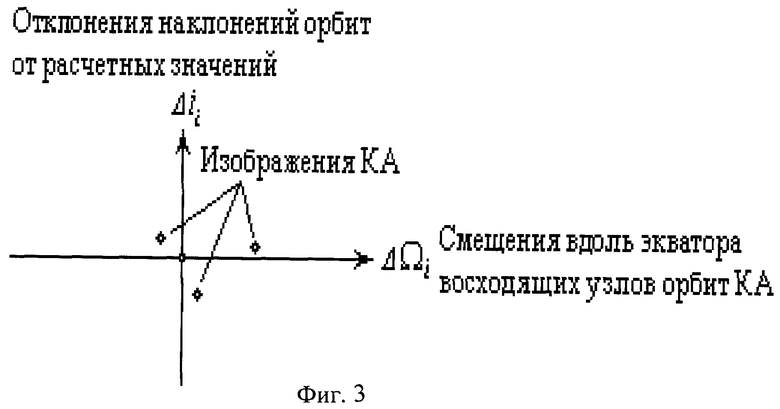
фиг.3 - отображение отклонений наклонений орбит от расчетных значений параметров плоскостей реальных орбит КА;
фиг.4 - пример обработки исходных параметров орбитальной группировки КА и пересчета их в обобщенный геометрический образ орбитальной группировки КА с координатами (r, ui-u0), где r - радиус-вектор КА (от притягивающего центра до КА), (ui-u0) - изменение угла, образуемого проекцией радиуса вектора на плоскость, ортогональную оси Z с фиксированным направлением в указанной плоскости.
Пример схемы для пересчета параметров орбиты одного КА с реальной (фактической) в орбиту сопровождающей его УОСК (условную) в функции времени t показан на фиг.1.
На фиг.1 показаны плоскости реальной орбиты КА и орбиты УОСК пересекающихся по линии узлов орбит и соотношение пересчитываемых координат (x, y, z) для положения КА в определенный момент времени.
На фиг.2 показан пример отображения траектории движении одного КА на экране в УОСК с координатами (ri,, ui-u0), где 1 - эталонный след движения КА по расчетным орбитам в расчетных положениях, 2 - реальная траектория отклоняющегося КА, 3 - ограничения по высоте, 4 - изображения КА на эталонном следе и на траектории уклонения от него.
Из совокупности рассчитанных точек формируются геометрические образы, представляющие в компактном, наглядном, удобном для быстрой и надежной сравнительной оценки виде основные характеристики взаимного расположения и движения КА в системе.
Например, на фиг.3 показаны изображения на экране космических аппаратов с отклонениями ΔΩi и Δtni реальных орбит от расчетных значений Ωi и Δtni.
Синхронное созвездие КА, представляющее собой взаимное расположение КА в орбитальной плоскости в единой для всех ОСК (ЕОСК) в единый момент времени, вычисляется и отображается совместно. Положение каждого КА в единой ОСК отображается точкой с координатами (ri,, ui-u0);
Эталонный след движения КА в орбитальной плоскости в единой ОСК системы является основным геометрическим образом изображения. Относительно него визуально оцениваются реальные отклонения КА от заданного положения в орбитальной группировке. Вычисляется с приведением текущего значения большой полуоси орбиты ai к начальному значению a0 и образуется системой точек для различных значений эксцентрической аномалии 0≤E≤2π. Количество расчетных точек выбирают практическим путем.
Прогнозируемый в единой ОСК след одиночного КА, для которого обнаружено значительное отклонение величин основных элементов от средних для системы, вычисляется в зависимости от располагаемого времени и представляет собой совокупность расчетных точек. Точки отображаемых групп КА в орбитальной группировке КА идентифицируют с помощью цвета и маркирующих символов.
Повышение быстродействия предлагаемого способа достигается введением упрощений, несущественно снижающих точность оперативных оценок. К их числу относятся:
исключение учета абсолютных возмущений движения КА. Такое допущение основано на том, что изменение взаимных положений КА в системе определяется влиянием не абсолютных возмущений, а их разностей, величины которых существенно меньше;
упрощение учета некомпланарности оскулирующих орбит реальных КА в орбитальных плоскостях соответствующих им УОСК:
плоскости этих орбит принимаются компланарными, поправка вводится в продольном движении для учета долгот восходящих узлов, величина поправки вычисляется по приближенной формуле:
Δu=(Ωоскулирующей орбиты-Ωрасчетной круговой орбиты)·Cos i0 ,
где Δu - поправка к положению КА в УОСК вдоль орбиты,
Ωоскулирующей орбиты - долгота восходящего узла оскулирующсй орбиты,
Ωрасчетной круговой орбиты - долгота восходящего узла расчетной круговой орбиты,
i0 - наклонение условной круговой орбиты.
На фиг.4 приведен пример блок-схемы расчета начальных условий баллистического построения орбитальной группировки КА (Ωi, Ω0i, i, tn0, a0, µ) в кривые отображения на экране (ri,, ui-u0) с фиксацией отклонений (ΔΩ и Δi),
где Mi - средняя аномалия;
i - номер витка;
µ - коэффициент притяжения Земли;
ai - большая полуось общего земного эллипсоида;
E - эксцентрическая аномалия;
ei - эксцентриситет;
M0i - средняя аномалия i-го витка в начальный момент времени;
a0 - прямое восхождение КА (топоцентрическое);
tni - время движения n-го КА на i-м витке;
tn0 - начальное время прохождения перигея орбиты n-го КА на i-м витке;
ui - аргумент широты КА на i-м витке;
ui0 - начальное значение аргумента широты КА на i-м витке;
ωi - аргумент перигея на i-м витке;
ω0i - начальный аргумент перигея на i-м витке;
Ωi - долгота восходящего узла орбиты КА на i-м витке;
Ω0i - начальная долгота восходящего узла орбиты КА на i-м витке;
ri - расстояние от центрального тела до КА на i-м витке.
Предлагаемый способ позволяет отображать на экране информацию о динамическом состоянии орбитальной группировки КА в виде условного обобщенного образа, по которому оператор системы контроля космического пространства оценивает следующие факторы:
- общее взаимное расположение КА в системе по виду синхронного созвездия КА и, более точно, - сравнивая это созвездие с эталонным следом в единой ОСК;
- соответствие максимальных и минимальных высот движения КА их предельно допустимым значениям, представляемым на экране в виде двух линий расчетных высот (фиг.2, позиция 3);
- взаимное уклонение КА в движении вдоль орбиты по расстоянию между ними вдоль эталонного следа. Для повышения точности такой оценки на изображение может быть наложена, например, в виде маски сетка линий равных значений истинных аномалий ϑ;
- боковые уклонения КА от расчетных положений в системе и изменения наклонений их орбит по графику отклонений от заданных значений прямых восхождений восходящих узлов и наклонений орбит КА, на котором индицируются значения ΔΩ и Δi для всех КА системы (фиг.3);
- приближенную величину допустимого углового положения или момента времени очередной коррекции орбиты уклонившегося КА.
Эффективность предлагаемого способа с использованием разработанной формы индикации орбитальной группировки КА и управления ею на основе обработки оперативной баллистической информации состоит в: обеспечении надежного и оперативного взаимодействия потребителя информации с ЭВМ, повышении оперативности вычислений за счет сокращения аналитической части метода и повышении оперативности и надежности оценки структуры системы за счет компактности и наглядности геометрических форм представления информации.
Для удобства работы с отображающим устройством предлагаемый способ позволяет подключать программы, обеспечивающие регулировку масштабов изображения и выбор режимов работы:
- индикация структуры созвездия для заданного момента времени;
- индикация эталонного следа для среднего оскулирующего движения в системе;
- индикация прогнозируемого следа одиночного КА;
- совмещенные режимы (созвездие и эталонный след, прогнозируемый след и эталонный след, следы группы КА);
- динамическая индикация синхронного созвездия КА для текущего момента времени;
- режимы измененного масштаба времени.
Технический результат от применения предлагаемого способа заключается в повышении надежности и оперативности восприятия информации, что обеспечивает увеличение скорости принятия оператором решения в задачах контроля космического пространства. Это достигается за счет повышения эргономичности устройства отображения ситуации в космическом пространстве и дает возможность отображения большего количества информации о состоянии космической группировки за счет сведения параметров к условному, удобному для восприятия оператором виду. Использование обобщенного условного вида орбитальной группировки КА на экране облегчает выбор оператором из всей группировки требуемой выборки контролируемых КА, что уменьшает информационную нагрузку на оператора. Повышение скорости обнаружения нестандартно маневрирующих КА при наглядном отображении на экране отклонений КА от штатных баллистических параметров улучшает качество контроля космического пространства.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ формирования группировки космических аппаратов для локального наблюдения заданной области планеты | 2017 |
|
RU2671601C1 |
| СПОСОБ СОЗДАНИЯ АГРЕГИРОВАННОЙ СПУТНИКОВОЙ ИНФОРМАЦИОННОЙ СИСТЕМЫ | 2024 |
|
RU2839636C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ВЕКТОРА СОСТОЯНИЯ ПАССИВНОГО КОСМИЧЕСКОГО ОБЪЕКТА | 2013 |
|
RU2542836C2 |
| Многофункциональный наземный комплекс управления, приема и обработки информации | 2024 |
|
RU2828016C1 |
| СПОСОБ ПЕРЕДАЧИ ИНФОРМАЦИИ В СЕТИ НИЗКООРБИТАЛЬНОЙ КОСМИЧЕСКОЙ СПУТНИКОВОЙ СВЯЗИ | 2013 |
|
RU2574855C2 |
| СПОСОБ ФОРМИРОВАНИЯ ГРУППИРОВКИ ИСКУССТВЕННЫХ СПУТНИКОВ ЗЕМЛИ ДЛЯ МОНИТОРИНГА ПОТЕНЦИАЛЬНО ОПАСНЫХ УГРОЗ В ОКОЛОЗЕМНОМ КОСМИЧЕСКОМ ПРОСТРАНСТВЕ В РЕЖИМЕ, БЛИЗКОМ К РЕАЛЬНОМУ ВРЕМЕНИ | 2018 |
|
RU2711554C1 |
| СПОСОБ ПРЕДУПРЕЖДЕНИЯ ОБ ОПАСНЫХ СИТУАЦИЯХ В ОКОЛОЗЕМНОМ КОСМИЧЕСКОМ ПРОСТРАНСТВЕ И НА ЗЕМЛЕ И АВТОМАТИЗИРОВАННАЯ СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2570009C1 |
| СПОСОБ АДАПТИВНОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЦЕНТРА МАСС КОСМИЧЕСКОГО АППАРАТА | 2011 |
|
RU2487823C1 |
| РЕГИОНАЛЬНАЯ СИСТЕМА МОБИЛЬНОЙ СПУТНИКОВОЙ СВЯЗИ И ОБСЛУЖИВАНИЯ ТРАНСПОРТНЫХ КОРИДОРОВ | 2005 |
|
RU2322760C2 |
| СПОСОБ РАЗМЕЩЕНИЯ КОСМИЧЕСКОГО АППАРАТА НА ГЕОСТАЦИОНАРНОЙ ОРБИТЕ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2010 |
|
RU2480384C2 |
Изобретение относится к области ракетно-космической техники и может быть использовано для повышения эффективности работы систем наблюдения за космической обстановкой. Технический результат - расширение функциональных возможностей за счет повышения надежности и оперативности восприятия информации и скорости принятия оператором решения в задачах контроля космического пространства. Для достижения данного результата движение космического аппарата в орбитальной группировке представляют в аналитическом и геометрическом виде относительно сопровождающей его условной орбитальной системы координат (УОСК). При этом взаимное расположение круговых орбит и привязка движений УОСК по времени соответствуют характеристикам орбитальной структуры группировки космических аппаратов, прогнозируемым на момент времени, относительно которого осуществляется контроль. Причем для космических аппаратов, движущихся в одной плоскости, вводится единая круговая орбита, на которой движение космического аппарата отмечают идентифицирующей меткой. 4 ил.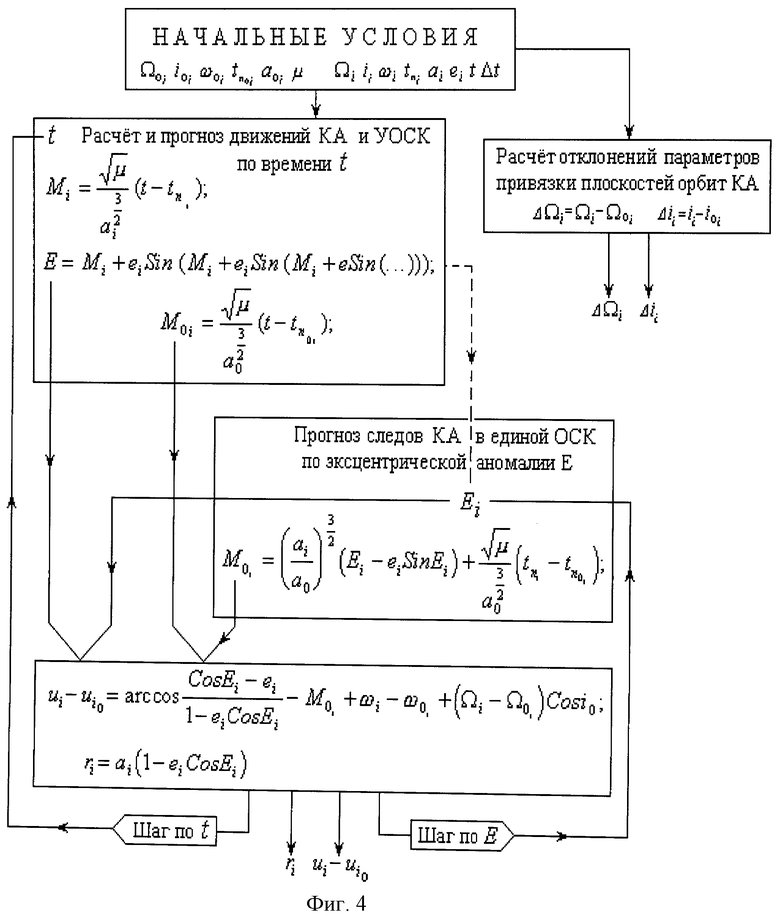
1. Способ отображения баллистического состояния орбитальной группировки космических аппаратов, заключающийся в обработке координат космических аппаратов для оперативного контроля и управления в системе контроля космического пространства, отличающийся тем, что параметры движения космического аппарата в орбитальной группировке представляют в аналитическом и геометрическом виде относительно сопровождающей его условной орбитальной системы координат, движущейся по круговой орбите с радиусом, равным средней расчетной величине большой полуоси орбит всех космических аппаратов орбитальной группировки и привязанной к исходному времени и аргументу широты, а взаимное расположение круговых орбит, по которым движутся условные орбитальные системы координат, и привязка движений условных орбитальных систем координат по времени соответствуют расчетным теоретическим характеристикам орбитальной структуры группировки космических аппаратов, прогнозируемым на момент времени, относительно которого осуществляется контроль, причем для космических аппаратов, движущихся в одной плоскости, вводится единая расчетная круговая орбита, на которой движение космического аппарата отмечают идентифицирующей меткой, а для одновременного представления космических аппаратов, движущихся в разных плоскостях, условные орбитальные системы координат этих космических аппаратов совмещают для отображения в единой космической обстановке на экране оператора.
2. Способ по п.1, отличающийся тем, что при отображении космической обстановки на экран оператора выводят выборку отображений контролируемых космических аппаратов, имеющих расчетные и фактические параметры плоскостей орбиты и орбитального движения.
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ КОСМИЧЕСКОГО ОБЪЕКТА | 2006 |
|
RU2319172C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ОРБИТЫ ГЕОСТАЦИОНАРНОГО СПУТНИКА | 2005 |
|
RU2313104C2 |
| Устройство для дистанционного включения и выключения установок уличного освещения | 1938 |
|
SU62473A1 |
| СПОСОБ ОРБИТАЛЬНОГО ПОСТРОЕНИЯ НАВИГАЦИОННОЙ СПУТНИКОВОЙ СИСТЕМЫ | 2004 |
|
RU2314232C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОДВИЖНЫХ НАЗЕМНЫХ ОБЪЕКТОВ | 2010 |
|
RU2436045C1 |
| СПОСОБ КОРРЕКЦИИ ПОЗИЦИОННОЙ ПОГРЕШНОСТИ В НАВИГАЦИОННОЙ СИСТЕМЕ | 2003 |
|
RU2254558C2 |

