(54) АСТАТИЧЕСКАЯ СИСТЕМА РЕГУЛИРОВАНИЯ
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1999 |
|
RU2161579C1 |
| Поисковый регулятор для резонансной настройки контура нулевой последовательности сети | 1982 |
|
SU1080231A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| Нелинейный привод | 1975 |
|
SU591810A1 |
| ФАЗОСДВИГАЮЩЕЕ УСТРОЙСТВО | 2001 |
|
RU2216846C2 |
| Аналого-цифровой интегратор | 1978 |
|
SU805345A1 |
| ПРОПОРЦИОНАЛЬНО-ИНТЕГРАЛЬНЫЙ РЕГУЛЯТОР | 2017 |
|
RU2648516C1 |
| УСТРОЙСТВО ФОРМИРОВАНИЯ СИГНАЛА УПРАВЛЕНИЯ ИСПОЛНИТЕЛЬНЫМ ЭЛЕМЕНТОМ ОПТИКО-ЭЛЕКТРОННЫХ СЛЕДЯЩИХ СИСТЕМ | 1995 |
|
RU2093850C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ ПИКОВЫЙ ДЕТЕКТОР | 2019 |
|
RU2708687C1 |
| КОМБИНИРОВАННАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2389041C2 |
1
Изобретение относится к нелинейным астатическим системам автоматического регулирования и может быть использовано в астатических привода с ограничением, подверженных воздействию помех.
Известна нелинейная астатическая система управления, содержащая элемент сравнения, интегрирующее звено объект управления, охваченный цепью обратной связи DlПрименение в прямом канале известной системы интегрирующего, с нулевым фазовым сдвигом обеспечивает высокий запас устойчивости системы и повышает ее динамические характеристики Г2 JH З .
Известны также астатические системы, содержащие в прямом канапе регулирования параллельно соединенные между собой интеграторы с элементами односторонней проводимости на их входах и выходах и вспомогательный
канал, служащий для управления рабо той интегрирующих каналов 4. -.
Недостаток этойсистемы состоит в низкой помехозащищенности. Под воздействием помехи имеет место ложное подключение выходных сигналов интеграторов ко входу исполнительного механизма, что приводит к ухудшению динамических свойств и даже потере устойчивости системы.
Наиболее близкой по технической сущности к предлагаемой является астатическая системы регулирования, содержащая два нелинейных интегратора, первые входы которых подключены к выходу сумматора, а выходы к соответствующим входам исполнитель кого механизма, выход которого соединен со входом объекта регулирования, выход которого соединен с одним из входов сумматора 15.
Недостаток известной системы состоит В.ТОМ, что она имеет низкую помехозащищенность. Помеха любой
частоты беспрепятственно проходит, через усилительный канал на вход исполнительного механизма, и кроме того, осуществляет ложный разряд интеграторов, включенных в прямой канал системы. В результате этого исполнительный механизм не.отрабатывает в должной мере управляю щий сигнал, содержащий помеху, что приводит к ухудшению динамических свойств системы.
Если объект регулирования является структурно неустойчивым, то в результате наличия в прямом канале помехи известная астатическая систе ма может потерять устойчивость.
Цель изобретения - повышение помехозащищенности системы
Указанная цель достигается тем, что в системе установлены два блока сравнения, первые входы которых подключены к выходу исполнительного механизма, вторые входы - к, выходу сумматора, а выходы - ко вторым входам соответствующих нелинейных интеграторов .
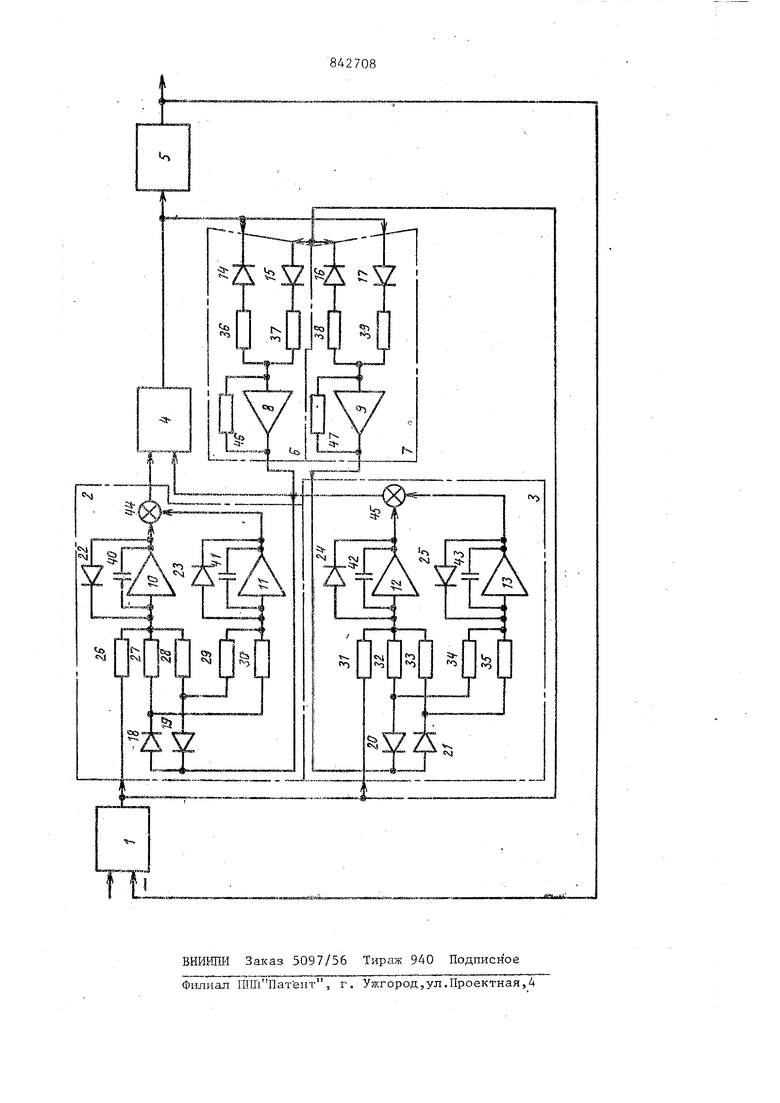
На чертеже представлена функциональная схема предлагаемой системы.
Система содержит сумматор 1, первый и второй нелинейные интеграторы 2 и 3, исполнительный механизм 4, объект 5 регулирования, первый и второй блоки 6 и 7 сравнения, операционные усилители 8-13, диоды 14-25, входные резисторы операционных усилителей 26-39, конденсаторы 40-43, сз ммирующие элементы 44 и 45, резисторы 46 и 47 в обратных связях операционных усилителей.
Так как включение операционных усилителей 10-13 аналогично, то рабо ту предлагаемой системы рассмотрим на примере отработки астатической системой управляющего сигнала одной полярности, например положительной.
Система работает следующим образом.
При появлении управляющего сигнала положительной полярности на выходе сз мматора 1 (выходной сигнал сумматора 1 является сигналом рассогласования предлагаемой системы) операционный усилитель 10 интегрирует суммарный (двойной) сигнал,, поступивший на его вход через резистор 26 и через диод 18, операвдонный усилитель 8 и диод 15 - на его вход через резистор 27. Дпя того.
427084
чтобы сигналы, поступающие на входы через резисторы 26 и 27 операционHoVo усилителя 10 (суммирующего интегратора) имели одинаковый знак,
J необходимо обеспечить операционным усилителям 8 (и 9) неинвертирующие свойства. Кроме того, до прихода задающего сигнала на вход систегиы сигнал на выходе объекта 5 регулирования равен нулю, регулирующий орган исполнительного механизма 4 находится в нейтральном положении и сигнал н.а втором входе исполнительного механизма 6 равен нулю.
15 Операционный усилитель 10 в отличие от операционного усилителя ,12 интегрирует суммарный входной сигнал, так как диод 22 в его цепи обратной связи не оказывает шунтирующего влияния. С учетом инвертирующего действия операционных усилителей положительный выходной сигнал сумк тора 1 не проходит через операционный усилитель 12 (суммирующий
25 интегратор) и операционный усилитель . 9 в силу того, что-диод 24 в цепи обратной связи операционного усилителя 1 2 и диод 16 включены в обратном направлении для сигнала этой полярности.
Проинтегрированный сигнал с выхода нелинейного интегратору 2 поступает на вход исполнительного механизма 4. В отличие от известной системы осуществляется интегрирование удвоенного сигнала рассогласования, что повьш1ает быстродействие системы, так как время нарастания выходного сигнала нелинейного интегратора 2 до величины, при которой исполнительный механизм 4 приходит в движение, уменьшается в 2 раза за счет интегрирования удвоенного сигнала р.ассогласования системы.
Исполнительный механизм 4 отрабатьгоает выходной сигнал нелинейного интегратора 2. Выходной сигнал исполнитель.ного механизма 4 имеет полярность, противоположную выходному сигналу сумматора 1, и поступает на вход.объекта регулирования, и через диод 14 - на вход операционного усилителя 8, Выходной сигнал исполнительного механизма 4 на вход операционного усилителя 9 не поступает из-за обратного включения диода 17.
В момент, когда сигнал на выходе исполнительного механизма 4 превысит сигнал на выходе -сумматора 1 , разностный сигнал на выходе операционного усилителя 8 изменяет свой знак на обратный и поступает через диод 19 на вход через резистор 28 операционного усилителя 10 и на вход через резистор 29 операционного усили ля 11. Конденсатор 40 в цепи усилителя 10 начинает разряжаться, а кон денсатор 41 в цепи усилителя 11 начинает заряжаться, так как диоды в цепях;их обратных связей включены в противоположных направлениях. При нахождении системы в положение равновесия выходные сигналы операци онных усилителей 10 и 11 компенсируют другдруга. При изменении знака входного сиг нала системы в. работу вступают усилители 9, 12 и 13. Их работа аналогична работе усилителей 8, 10 и 11. Если коэффициенты передачи операционных усилителей 10-13 по входа через резисторы 27-30 и 32-35 сделать достаточно большими, то быстро действие предлагаемой астатической системы будет не хуже известной сис темы. При этом в отличие от известной системы достигается высокая помехозащищенность, так как помеха любой частоты сглаживается интегра1торами и не подвергается ограничению исполнительным механизмом. Это позволяет улучшить динамические зво ства астатических систем с ограничением подверженных воздействию пом В известной системе можно повыси помехозащищенность путем уменьшения коэффициента передачи канала пропор ционального регулирования вплоть до полного отключения его. Однако при этом значительно ухудшается быстродействие,системы. Переходный процесс имеет долгозатухающие копе;бания. 6 Положительный эффект от исполь- . ования предлагаемого изобретения остоит в том, что на 10% повьппается помехозащищенность астатической истемы, при этом качество переходого и установившегося режимов рабоы системы не ухудшается. Формула изобретения Астатическая система регулирования, содержащая два нелинейньйс интегратора, первые входы которых подключены к выходу сумматора а выходы - к соответствующим входам исполнительного механизма, выход которого соединен со входом объекта регулирования, выход которого соединен с одним из входов сумматора, отличающаяся тем, что, с целью повышения помехозащищенности .системы, в ней установлены два блока сравнения, первые входы кото|рых подключены к выходу исполнительного механизма, вторые входы - к сумматора, а выходы - ко вторым входам соответствующих нелиней ных интеграторов. Источники информации, принятые во внимание при экспертизе Г. Рабинович Л.В. и др. Проектирование следящих систем. М., Машиностроение, 1969, с. 214-218 2.Патент США № 3613016,.кл. 328167, опублик. 1971. 3.Karybakas С.А. Nonlinar. Inegrator with Zero Phase Shift IEEE, Trans. Ind. Electron, and Control. Instrum, 1977, № 2, 24, p. 150-152. 2. Авторское свидетельство СССР № 548837, кл. G 05 В 11/36, 1974. 5. Тэлер Дж. и Пестель М. Анализ и расчет нелинейньпс систем автоматического управления. М.-Л., Энергия 1964, с. 378-380 (прототип).
