1. Область техники к которой относится изобретение
Изобретение относится к области гироскопических систем ориентации и навигации подвижных объектов различных типов и, в частности, к классу бесплатформенных систем ориентации (БСО), в которых гироскопы устанавливаются непосредственно на корпусе подвижного объекта.
2. Уровень техники
Системы ориентации предназначены для определения угловой ориентации объекта относительно некоторой базовой системы координат (СК), неизменно ориентированной в инерциальном пространстве. Обычно они входят в состав инерциальных навигационных систем (ИНС), но могут использоваться и самостоятельно. Известны БСО, в состав которых входят блок гироскопических датчиков угловой скорости (ДУС) и вычислительное устройство [Гироскопические системы. Учеб. для вузов. Под ред. Д.С.Пельпора, 2-е изд., - М., Высшая школа, 1988, стр. 315-336]. Блок ДУС вырабатывает три взаимно ортогональные составляющие абсолютной угловой скорости по осям связанной с объектом СК. Выходные сигналы блока ДУС обрабатываются в соответствии с алгоритмом ориентации, реализующим интегрирование дифференциальных кинематических уравнений движения объекта, с целью выработки параметров ориентации. Таким образом вычислительное устройство выполняет функцию блока определения угловой ориентации (блока ОУО).
В последние годы широкое применение получили БСО, построенные на ДУС, выходные сигналы которых представляют собой приращения интеграла от угловой скорости по оси чувствительности ДУС на такте его опроса [Репников А.В., Сачков Г. П. , Черноморский А.И. Гироскопические системы: Учеб. пособие для авиац. Вузов - М., Машиностроение, 1983, стр. 255-266]. (К таким гироскопам относятся, в частности, лазерные гироскопы). Именно такая БСО рассматривается ниже в качестве наиболее близкого аналога (прототипа).
Общими признаками изобретения и прототипа следует считать установленный на корпусе объекта блок ДУС и блок ОУО, на входы которого поступают выходные сигналы блока ДУС, представляющие собой приращения интегралов от трех взаимно ортогональных проекций угловой скорости на такте его опроса.
Для достижения необходимой точности выработки параметров угловой ориентации в условиях высокочастотных шумов ДУС и интенсивной угловой вибрации основания в известных БСО приходится осуществлять в блоке ОУО дополнительное сглаживание выходных сигналов ДУС, что приводит к значительному увеличению потребной вычислительной производительности блока ОУО (по сравнению со случаем, когда высокочастотные шумы ДУС и вибрация основания отсутствуют).
3. Сущность изобретения
Основной задачей, на решение которой направлено заявляемое изобретение, является достижение необходимой точности выработки параметров угловой ориентации объекта в условиях высокочастотных шумов ДУС и вибрации основания без дополнительного сглаживания выходных сигналов ДУС, т.е. без увеличения вычислительной производительности блока ОУО.
Поставленная цель достигается за счет включения в состав БСО (помимо общих с прототипом блока ДУС и блока ОУО) цепочки n (n не меньше 1) последовательно соединенных трехканальных интеграторов (ТИ) и блока синхронного перезапуска интеграторов (СПИ). На входы первого ТИ поступают выходные сигналы блока ДУС, представляющие собой текущие значения первых интегралов от измеряемых составляющих угловой скорости (сигнал по каждой из составляющих поступает на свой вход трехканального интегратора). Выходные сигналы блока ДУС и всех ТИ, представляющие собой приращения кратных интегралов от измеряемых составляющих угловой скорости (кратности от 2 до n+1) на такте опроса ДУС, поступают на вход блока ОУО, где и производится вычисление параметров ориентации. Все ТИ имеют дополнительный вход, на который из блока СПИ поступает сигнал, обеспечивающий синхронный перезапуск с обнулением всех интеграторов с тактом, равным такту опроса блока ДУС.
Заявленный технический результат от использования изобретения достигается за счет применения всех перечисленных выше существенных признаков, причем чем большее количество ТИ используется (чем больше n), тем более высокая точность определения угловой ориентации объекта может быть достигнута.
4. Перечень фиг. 1 и 2
Фиг. 1 и 2 иллюстрируют состав заявляемого устройства и его эффективность в сравнении с прототипом.
На фиг. 1 изображены блок ДУС (1), цепочка n последовательно соединенных трехканальных интеграторов (21 - 2n), блок ОУО (3), блок СПИ (4) и функциональные связи между ними: вырабатываемые блоком ДУС приращения первых интегралов от составляющих угловой скорости по трем взаимно ортогональным осям x, y, z (θ
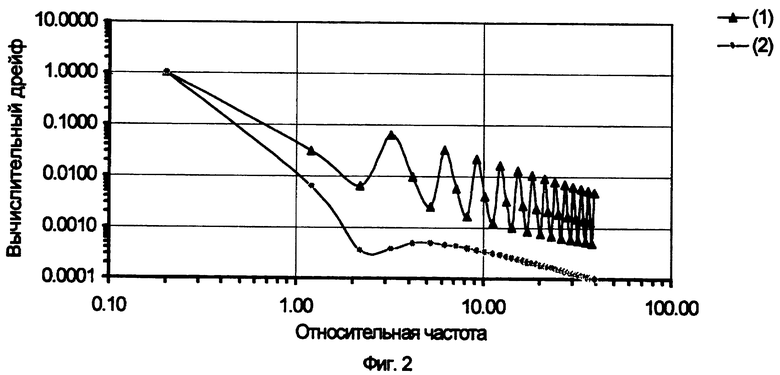
На фиг. 2 в логарифмическом масштабе приведены графики погрешностей определения угловой ориентации для устройства-прототипа (1) и заявляемого устройства (2) при имитации полезного углового движения объекта, задаваемого как коническое движение, совместно с высокочастотной угловой вибрацией основания.
5. Сведения, подтверждающие возможность осуществления изобретения
Заявляемое устройство, представленное на фиг. 1, состоит из блока ДУС (1), цепочки n последовательно соединенных трехканальных интеграторов - ТИ (21 - 2n), блока определения угловой ориентации - блока ОУО (3) - и блока синхронного перезапуска интеграторов - блока СПИ (4). Выходные сигналы блока ДУС (1) и всех ТИ (21 - 2n) соединены со входами блока ОУО (3), причем три входа первого ТИ (21) соединены с соответствующими выходами блока ДУС (1), а дополнительные входы ТИ (21 - 2n) соединены с выходом блока СПИ (4).
Принцип действия заявляемого устройства следующий.
На входы первого ТИ (21) поступают выходные сигналы блока ДУС (1), представляющие собой текущие значения первых интегралов от измеряемых составляющих угловой скорости по трем взаимно ортогональным осям x, y, z (сигнал по каждой из составляющих поступает на свой вход ТИ). Выходные сигналы блока ДУС (1) и всех n ТИ (21 - 2n), представляющие собой приращения кратных интегралов от измеряемых составляющих угловой скорости (кратности от 2 до n+1) на такте опроса ДУС, поступают на вход блока ОУО (3), где и производится вычисление параметров ориентации. Все ТИ (21 - 2n) имеют дополнительный вход, на который из блока СПИ (4) поступает сигнал, обеспечивающий синхронный перезапуск с обнулением всех интеграторов с тактом, равным такту опроса блока ДУС.
В устройстве-прототипе интегрирование измеряемых блоком ДУС трех ортогональных составляющих угловой скорости на интервале опроса tk, tk+Δt (Δt - такт опроса ДУС, k = 0, 1, 2...) осуществляется в электронике гироскопов в дискретной форме с высокой частотой, значительно превышающей частоту опроса блока ДУС (1/Δt). Таким образом, текущие значения первых интегралов от трех составляющих угловой скорости могут быть считаны и многократно проинтегрированы также с высокой частотой. В заявляемом устройстве ТИ (21 - 2n) могут быть реализованы на серийно выпускаемых элементах цифровой техники.
Заявленный технический результат достигается за счет использования в блоке ОУО специальных вычислительных алгоритмов определения угловой ориентации объекта, использующих в качестве исходной информации приращения кратных (кратностью j не меньше 2) интегралов от измеряемых блоком ДУС (1) составляющих угловой скорости на такте его опроса. Автором была разработана методика синтеза нового класса алгоритмов такого вида, получены и исследованы конкретные алгоритмы для случаев j = 2, j = 3 и доказана эффективность данного класса алгоритмов (для любого j не меньше 2) по сравнению с соответствующими им по сложности известными алгоритмами ориентации (которые используют в качестве исходной информации только вырабатываемые блоком ДУС приращения первых интегралов от измеряемых составляющих угловой скорости на такте его опроса) с точки зрения сглаживания высокочастотных составляющих в выходных сигналах ДУС (шумов или вибраций). Ниже дается краткое изложение основных положений и результатов разработки новых алгоритмов ориентации.
Согласно общей методике разработки алгоритмов ориентации приращения параметров угловой ориентации на такте решения задачи ΔT выражаются через значения коэффициентов полиномиальной модели угловой скорости на интервале (ti, ti+ΔT, i = 0,1,...), которые в соответствии с общеизвестной методикой определяются через выходные сигналы блока ДУС, при этом частота опроса ДУС - 1/Δt в общем случае может быть выше частоты решения задачи ориентации в блоке ОУО - 1/ΔT (кратна ей). Параметры модели угловой скорости определяются из системы алгебраических уравнений, полученных для каждого выходного сигнала блока ДУС, таким образом количество коэффициентов, которые могут быть определены, равно количеству выходных сигналов блока ДУС на такте решения задачи, которое используется в алгоритме.
В соответствии с новой методикой искомые коэффициенты модели угловой скорости определяются из другой системы алгебраических уравнений, полученных для выходных сигналов как блока ДУС, так и ТИ, выходные сигналы которых используются в алгоритме, при этом такт опроса блока ДУС и ТИ равен такту решения задачи ориентации. Оказывается, что полученные таким образом оценки коэффициентов модели угловой скорости обладают свойствами оценок по методу наименьших квадратов, т.е. обладают сглаживающими свойствами.
В качестве примера ниже приведены алгоритм, предложенный Р.Миллером [Р. Б. Миллер. Новый алгоритм определения параметров ориентации для бесплатформенных систем. Аэрокосмическая техника, т. 2, N 5, май 1984 г., стр. 127-133] - наиболее часто применяемый из общеизвестных алгоритмов, в котором используются три равноотстоящие по времени на такте решения задачи ориентации выходных сигналов блока ДУС (θ
Алгоритм Р.Миллера:
Φ(ti+ΔT) = θ1+X(θ
где θ1= θ
Новый алгоритм: , /2/
, /2/
где  коэффициенты, зависящие от ΔT.
коэффициенты, зависящие от ΔT.
На фиг. 2 в логарифмическом масштабе приведены графики погрешностей определения угловой ориентации в зависимости от относительной частоты (отношения частоты вибрации к частоте опроса блока ДУС) для устройства-прототипа при использовании алгоритма (1) и заявляемого устройства при использовании алгоритма (2) при имитации полезного углового движения объекта, задаваемого как коническое движение, совместно с высокочастотной угловой вибрацией основания. Как видно из приведенных кривых, новый алгоритм точнее традиционного алгоритма примерно на 2 порядка. Таким образом, необходимая точность выработки параметров угловой ориентации объекта в условиях высокочастотных шумов ДУС и вибрации основания может быть обеспечена без использования дополнительного сглаживания выходных сигналов блока ДУС, т.е. без увеличения вычислительной производительности блока ОУО.
| название | год | авторы | номер документа |
|---|---|---|---|
| ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1986 |
|
SU1840258A1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ | 2003 |
|
RU2249791C2 |
| СПОСОБ АВТОНОМНОЙ ИНЕРЦИАЛЬНОЙ ОРИЕНТАЦИИ ПОДВИЖНЫХ ОБЪЕКТОВ | 2022 |
|
RU2800846C1 |
| СПОСОБ ОРБИТАЛЬНОГО ГИРОКОМПАСИРОВАНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2583350C1 |
| СПОСОБ КАЛИБРОВКИ ПАРАМЕТРОВ БЕСПЛАТФОРМЕННОГО ИНЕРЦИАЛЬНОГО ИЗМЕРИТЕЛЬНОГО МОДУЛЯ | 2004 |
|
RU2269813C2 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ КУРСОВЕРТИКАЛЬ | 2014 |
|
RU2564379C1 |
| Выключатель цепей коррекции гироскопических приборов ориентации на вираже | 2020 |
|
RU2743656C1 |
| Адаптивный корректор углов ориентации для БИНС | 2020 |
|
RU2749152C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТОПОЛОЖЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ И КОМПЛЕКСИРОВАННАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2009 |
|
RU2395061C1 |
| Способ определения углов ориентации ЛА на вертикальных траекториях полета | 2017 |
|
RU2671291C1 |
Изобретение относится к области гироскопических систем ориентации и навигации подвижных объектов различных типов. Система состоит из блока датчиков угловой скорости (ДУС) и блока определения угловой ориентации, цепочки n (n не меньше 1) последовательно соединенных трехканальных интеграторов и блока синхронного перезапуска интеграторов. На входы первого интегратора поступают выходные сигналы блока ДУС, представляющие собой текущие значения первых интегралов от измеряемых составляющих угловой скорости, а выходные сигналы блока ДУС и всех интеграторов поступают на вход блока ориентации, где и производится вычисление параметров ориентации. Все интеграторы имеют дополнительный вход, на который из блока перезапуска поступает сигнал, обеспечивающий синхронный перезапуск с обнулением всех интеграторов с тактом, равным такту опроса блока ДУС. За счет использования в блоке ориентации выходных сигналов интеграторов, представляющих собой приращения кратных интегралов от измеряемых составляющих угловой скорости, необходимая точность выработки параметров угловой ориентации в условиях высокочастотных шумов ДУС и угловой вибрации основания обеспечивается без применения в блоке ориентации дополнительного сглаживания выходных сигналов блока ДУС. 2 ил.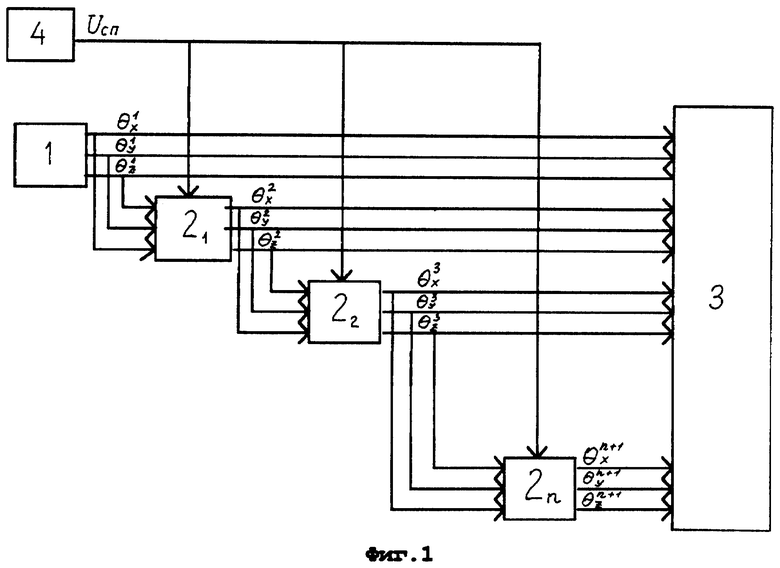
Бесплатформенная система ориентации, включающая трехканальный блок гироскопических датчиков угловой скорости и блок определения угловой ориентации, отличающаяся тем, что в состав бесплатформенной системы ориентации включены n последовательно соединенных трехканальных интеграторов (n не менее 1) и блок синхронного перезапуска интеграторов, при этом выходы трехканального блока датчиков угловой скорости и всех трехканальных интеграторов соединены со входами блока определения угловой ориентации, входы первого трехканального интегратора соединены с одноименными выходами трехканального блока датчиков угловой скорости, а дополнительные входы всех трехканальных интеграторов соединены с выходом блока синхронного перезапуска интеграторов.
| РЕПНИКОВ А.В | |||
| и др | |||
| Гироскопические системы | |||
| - М.: Машиностроение, 1983, с | |||
| Гудок | 1921 |
|
SU255A1 |
| RU 2058534 C1, 20.04.1996 | |||
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ СИСТЕМА | 1996 |
|
RU2104492C1 |
| БЕСПЛАТФОРМЕННАЯ ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1990 |
|
RU2011169C1 |
| US 4265111, 05.05.1981. | |||

