Изобретение относится к устройствам отображения информации, используемой пилотом и членами экипажа при пилотировании летательными аппаратами (ЛА), а именно к командно-пилотажным индикаторам (КПИ).
Наиболее близким по технической сущности к заявляемому техническому решению является «Командно-пилотажный индикатор», Патент РФ №2207514 от 10.01.2002 г. МПК G01C 23/00/, у которого
на лицевой части экрана представлены:
- шкала вертикальной скорости;
- индикация режимов автопилота;
- различная навигационная информация, в частности изображение планово-навигационного прибора с подвижной круговой шкалой курса и стрелкой заданного направления.
Командно-пилотажный индикатор содержит:
- авиагоризонт;
- шкалу крена с индексом крена;
- подвижную шкалу тангажа;
- подвижную шкалу барометрической высоты с индикацией цифрового значения, с индексом заданной высоты и цифровым значением заданной высоты;
- величину давления дня;
- подвижную шкалу приборной скорости с индикацией цифрового значения, с индексом заданной скорости и цифровым значением заданной скорости;
- отсчетный неподвижный индекс;
- директорные индексы.
Авиагоризонт представляет собой прямоугольник, состоящий из двух полей "Небо" и "Земля" разного цвета. Разделяющая их условная линия горизонта отражает угловое положение самолета: она поворачивается в зависимости от угла крена и в то же время перемещается по вертикали в зависимости от угла тангажа. Одновременно с поворотом и перемещением линии горизонта меняется соотношение и положение полей "Небо" и "Земля". При нулевых значениях угла крена и тангажа линия горизонта занимает горизонтальное положение посредине прямоугольника, над ней находится фон "Небо", под ней - фон "Земля". Шкала тангажа перемещается вверх-вниз в соответствии со значением угла тангажа самолета вместе с линией горизонта, которая является нулевой риской шкалы.
В центре авиагоризонта индицируется символ самолета. Он представляет собой стилизованное изображение самолета при виде сзади и состоит из центральной окружности, двух горизонтальных отрезков прямой и трех вертикальных отрезков прямой, причем один горизонтальный отрезок расположен слева от центральной окружности на некотором расстоянии от ее края, а другой горизонтальный отрезок расположен справа от центральной окружности на том же расстоянии от ее края, что и первый горизонтальный отрезок, первый вертикальный отрезок расположен над центральной окружностью и касается ее в верхней точке, второй вертикальный отрезок примыкает своим верхним концом к правому концу того горизонтального отрезка, который расположен слева, третий горизонтальный отрезок примыкает своим верхним концом к левому концу того горизонтального отрезка, который расположен справа.
Символ самолета неподвижен, его центр служит отсчетным индексом для шкалы тангажа, а также является тем центром, вокруг которого поворачивается авиагоризонт и относительно которого движется линия горизонта.
Заданная траектория, заданный крен и заданная скорость индицируются при помощи единого указателя "Лидер", этот символ представляет собой симметричную фигуру, подобную по форме символу самолета. Он состоит из четырех элементов, изображающих различные части самолета при виде сзади:
- первая часть (фюзеляж) имеет форму окружности,
- вторая часть (крылья) состоит из двух горизонтальных отрезков прямой, примыкающих слева и справа к первой части,
- третья часть (киль) состоит из вертикального отрезка прямой, расположенного над центром первой части и касающегося одной своей стороной первой части,
- четвертая часть (шасси) имеет П-образную форму и расположена под первой частью симметрично относительно центра первой части.
Директорная команда по высоте индицируется индексом, перемещающимся вверх-вниз вдоль шкалы высоты.
Основные элементы индикации сгруппированы возле двух условных линий - горизонтальной и вертикальной.
- Горизонтальная линия проходит через середины счетчиков скорости и высоты. В установившемся горизонтальном полете по заданной траектории с этой линией должны совмещаться все основные подвижные элементы:
- линия горизонта;
- директорный указатель "Лидер";
- директорный индекс высоты;
- индекс заданной скорости;
- индекс заданной высоты;
- стрелка вертикальной скорости.
- Вертикальная линия проходит через центры двух символов, изображающих сам летательный аппарат: отсчетный индекс авиагоризонта и расположенный в центре шкалы курса.
В установившемся идеальном режиме полета с этой линией совмещаются все основные подвижные элементы:
- индекс крена;
- шкала тангажа;
- директорный указатель "Лидер";
- индекс путевого угла (треугольник на внешней стороне шкалы курса);
- стрелка заданного направления (крестообразная стрелка);
- стрелка азимута/курсового угла от системы радионавигации VOR или от радиокомпаса (контурная стрелка).
Величина отклонения подвижного элемента от этих двух линий служит мерой отклонения соответствующего параметра полета от установившегося идеального режима.
Указатель "Лидер":
- перемещается относительно центра символа самолета влево-вправо и вверх-вниз;
- поворачивается вокруг своего центра;
- изменяется в размерах.
По горизонтали указатель "Лидер" перемещается в соответствии с величиной отклонения от заданной траектории в горизонтальной плоскости или величиной директорной команды по курсу, обозначаемых в дальнейшем как ΔΨ.
По вертикали указатель перемещается в соответствии с величиной отклонения от заданной траектории в вертикальной плоскости или директорной команды по тангажу/углу наклона траектории, Δυ. При нулевых значениях отклонений ΔΨ и Δυ центр указателя "Лидер" попадает в центр символа самолета.
Указатель "Лидер" поворачивается вокруг своего центра в зависимости от величин заданного крена или директорной команды по крену, Δγ.
Геометрические размеры указателя изменяются в зависимости от отклонения от заданной скорости Δν. Когда скорость меньше заданной, символ "Лидер" уменьшается в размерах - "удаляется", когда скорость больше заданной, он увеличивается в размерах - "приближается". Когда скорость равна заданной, символ "Лидер" имеет номинальный размер, при этом он совмещается с символом самолета.
Тем самым изображается летящий перед ЛА "лидер", показывающий требуемое положение и скорость по принципу "делай, как я".
Когда ЛА находится на требуемой траектории, летит с требуемым креном и с заданной скоростью, указатель "Лидер" совмещается с символом самолета и по положению, и по размеру. Такая интуитивно понятная индикация упрощает пилотирование.
Указатель "Лидер" содержит четыре части:
- первую - центральную, служащую для отсчета горизонтального отклонения;
- вторую - горизонтально-ориентированную, служащую для отсчета вертикального отклонения;
- третью - вертикально-ориентированную, служащую для отсчета отклонения от заданного крена;
- четвертую - служащую для отсчета величины отклонения от заданной скорости; ее форма зависит от выбранной формы символа самолета.
Указатель может содержать и другие части, служащие изобразительным или иным целям.
В предпочтительной реализации указателя "Лидер" в виде самолетика первая часть изображается центральным кружком, вторая часть изображается горизонтальными отрезками по обе стороны кружка ("крылья"), третья часть изображается вертикальной линией над кружком ("киль"), четвертая часть имеет вид скобки с направленными вниз концами и располагается под центральным кружком.
Изобразительные атрибуты каждой части управляются отдельно в зависимости от достоверности параметров, определяющих:
величину Δψ для первой части;
величину Δυ для второй части;
величину Δγ для третьей части;
величину Δν для четвертой части.
Атрибутами могут быть цвет этой части символа, ее мигание, форма линий (сплошная, пунктир и т.п.) и др.
В предпочтительной реализации этим атрибутом является цвет. Когда информация в трактах Δψ, Δυ, Δγ, Δν достоверна, четыре части указателя имеют один цвет, например, синий или пурпурный. При недостоверности Δψ первая часть указателя индицируется другим цветом, например, бледно-серым. Аналогично изменяется цвет второй части при недостоверности Δυ, третьей части при недостоверности Δγ, четвертой части при недостоверности Δν.
Тем самым пилоту дается предупреждение о том, что соответствующее перемещение или размер указателя "Лидер" в данный момент не отражает действительного отклонения от заданного параметра.
Источником информации для КПИ служат системы ЛА.
Инерциальная навигационная система или курсовертикаль (ИНС/КВ) измеряет и выдает углы крена γ, тангажа υ и рысканья ψ летательного аппарата. Навигационный вычислитель (НВ) содержит в своей памяти заранее введенный маршрут полета и выдает данные по траектории полета (в горизонтальной плоскости), которую нужно выдерживать. Система воздушных сигналов (СВС) измеряет и выдает скорость V, высоту H и вертикальную скорость Vy ЛА. С пульта управления системы автоматического управления полетом (ПУ САУП) пилот задает требуемые высоту Hзад и скорость Vзад. В режиме директорного управления система автоматического управления полетом (САУП) на основе информации о текущих параметрах полета, полученных от систем ИНС/КВ, СВС, и требуемой траектории в горизонтальной и вертикальной плоскостях, полученной от систем НВ, ПУ САУП, формирует и выдает команды управления в вертикальной плоскости δυ, горизонтальной плоскости δψ и по крену δγ. Эти команды учитывают как величину отклонения, так и динамику ЛА. В других режимах управления ЛА система САУП выдает величины бокового отклонения от линии заданного пути ΔZ и отклонения от заданной высоты ΔH.
Командно-пилотажный индикатор принимает и отображает текущие параметры полета от систем ИНС/КВ, СВС. По информации от пульта управления ПУ САУП и текущей скорости от системы СВС, КПИ вычисляет отклонение от заданной скорости Δν. Эта величина, а также параметры, получаемые от системы автоматического управления полетом САУП и системы посадки (СП), используются в КПИ для управления указателем "Лидер". В режиме посадки указатель перемещается по горизонтали в соответствии с отклонением ЛА от курса посадки Єк, а по вертикали - в соответствии с отклонением ЛА от глиссады планирования Єг. При полете по маршруту в режиме директорного управления указатель перемещается в соответствии с директорными командами в вертикальной и горизонтальной плоскостях δυ, δψ, одновременно он поворачивается в соответствии с директорной командой по крену δγ. В режиме ручного управления указатель перемещается по горизонтали в соответствии с величиной бокового отклонения от линии заданного пути ΔZ, а по вертикали - в соответствии с величиной отклонения от заданной высоты ΔН.
Функциональная схема командно-пилотажного индикатора по данному изобретению содержит сумматор, мультиплексоры, блоки вычисления характеристик указателя "Лидер", блоки определения достоверности входной информации, экран и средства отображения на этом экране символов в соответствии с положением и состоянием ЛА - генератор символов.
Параметры, используемые для управления движением указателя "Лидер" по горизонтали, поступают на мультиплексор. В зависимости от режима полета мультиплексор выбирает один из этих параметров - либо директорную команду в горизонтальной плоскости δψ, либо отклонение ЛА от курса посадки Єк, либо боковое отклонение от линии заданного пути ΔZ.
Аналогично, для управления движением указателя "Лидер" по вертикали мультиплексор выбирает либо директорную команду в вертикальной плоскости δυ, либо отклонение ЛА от глиссады планирования Єг, либо отклонение от заданной высоты ΔH.
Выбранные значения поступают из мультиплексоров в блок вычисления положения, который вычисляет текущее положение указателя "Лидер" на экране, т.е. его смещение относительно символа самолета по горизонтали Х и по вертикали Y, после чего передает результаты вычисления в генератор символов.
Скорость ЛА V и заданная скорость Vзад поступают на сумматор, в котором вычисляется разность этих двух параметров - отклонение от заданной скорости ΔV. Величина отклонения поступает в блок вычисления размера, который в соответствии с этой величиной вычисляет масштаб индикации указателя "Лидер" m и передает этот масштаб в генератор символов.
Директорная команда по крену δγ поступает в блок вычисления поворота, который вычисляет, на какой угол φ следует повернуть указатель "Лидер" (с учетом направления рассогласования). Вычисленный угол передается в генератор символов (ГС).
Параметры, используемые для управления указателем "Лидер", параллельно передаются в блоки определения достоверности параметров. Каждый блок анализирует значение параметра и определяет его достоверность, используя избыточность передаваемой информации и априорные знания о характере изменения параметра. Например, при передаче параметра последовательным кодом по ГОСТ 18977-79 (зарубежный аналог - стандарт ARINC 429), передаваемый код содержит дополнительные разряды, позволяющие определить состояние источника информации и правильность передачи.
Блоки определения достоверности формируют признаки достоверности четырех частей указателя "Лидер, которые передаются в генератор символов.
Генератор символов формирует на экране изображения символа самолета, подвижного указателя "Лидер", шкал, счетчиков и других элементов формата изображения, показанного. Например, в случае реализации индикатора на базе электронно-лучевой трубки (ЭЛТ), ГС при помощи отклоняющей системы задает траекторию движения луча по экрану ЭЛТ, включая в нужных точках подсвет люминофора, так что в результате на экране высвечиваются соответствующие символы. Указатель "Лидер" позиционируется генератором символов в соответствии с вычисленными координатами X, Y, масштабируется в соответствии с вычисленным масштабом m и поворачивается на угол φ. Способ изображения частей указателя (цвет и т.п.) выбирается генератором символов в зависимости от признаков достоверности параметров.
Недостаток известного командно-пилотажного индикатора состоит в том, что угловое и пространственное положение ЛА определяется путем считывания информации с большого количества подвижных шкал:
- авиагоризонта, который представляет собой прямоугольник, состоящий из двух полей "Небо" и "Земля" разного цвета. Разделяющая их условная линия горизонта отражает угловое положение самолета: она поворачивается в зависимости от угла крена и в то же время перемещается по вертикали в зависимости от угла тангажа. Одновременно с поворотом и перемещением линии горизонта меняется соотношение и положение полей "Небо" и "Земля". При нулевых значениях угла крена и тангажа линия горизонта занимает горизонтальное положение посредине прямоугольника, над ней находится фон "Небо", под ней - фон "Земля". Шкала тангажа перемещается вверх-вниз в соответствии со значением угла тангажа самолета вместе с линией горизонта, которая является нулевой риской шкалы.
- шкалы крена с индексом крена;
- подвижной шкалы тангажа;
- подвижной шкалы барометрической высоты с индикацией цифрового значения, с индексом заданной высоты и цифровым значением заданной высоты;
- подвижной шкалы приборной скорости с индикацией цифрового значения, с индексом заданной скорости и цифровым значением заданной скорости;
- отсчетным неподвижным индексом;
Такое большое количество подвижных линейных шкал для индикации высоты, скорости и угла тангажа, круговая шкала для индикации крена, индексы заданной скорости и высоты загромождают индикационное поле командно-пилотажного индикатора и снижают информационную наглядность текущих параметров полета и рассеивает внимание летчика так как для оценки количественного значения перечисленных параметров требуется последовательно считывать информацию с соответствующих шкал, что приводит к увеличению времени оценки пространственного положения ЛА по показаниям приборов и уменьшению времени для оценки пространственного положения ЛА и принятия правильных управляющих действий, что не исключает аварийные и катастрофические последствия полета, связанные с потерей пилотом пространственной ориентации при управлении летательным аппаратом в экстремальных условиях полета.
Потеря пилотом пространственной ориентации при управлении летательным аппаратом в экстремальных условиях полета при дефиците времени и внимания возникнет в ручном и автоматическом режимах управления полетом ЛА из-за того, что управляющие сигналы по пространственному отклонению между текущей траекторией полета и заданной траекторией полета (ΔZ, ΔH) и угловому положению по сигналам угловых отклонений угла тангажа и угла курса (δυ, δΨ), а также управляющие сигналы отклонения ЛА при посадке от курса Єк и отклонения ЛА при посадке от глиссады планирования Єг предназначены только для подвижного индекса "Лидер" при неподвижном индексе "Самолет".
Неподвижность индекса "Самолет" на индикационном поле командно-пилотажного индикатора создает условие, при котором пилот не видит углового положения своего собственного ЛА в пространстве, а представляет его через подвижный индекс "Лидер", что приводит к потере пространственной ориентации и снижению безопасности полета.
Технической задачей заявляемого изобретения является повышение безопасности за счет создания на индикационном поле экрана командно-пилотажного индикатора одновременной единой образной комплексности текущей информации для летчика "крен-тангаж-высота-скольжение", которая в достоверной и понятной форме показывала бы летчику в едином моменте времени:
- угловое положение управляемого им летательного аппарата в пространстве (крен, тангаж, высота, угол скольжения) с аэродинамическими и инерционно-массовыми характеристиками его реального ЛА;
- отклонения от параметров заданной траектории полета ЛА в пространстве (высота, боковое отклонение);
- образное представление расчетных параметров, корректирующих отклонения от заданной траектории (крен, тангаж, угол скольжения, скорость);
- образное представление радиовысоты в масштабе неподвижной неравномерной шкалы значения высоты полета ЛА.
Техническая задача обеспечивается тем, что в командно-пилотажном индикаторе, содержащем экран, на котором индицируются неподвижный относительно центра индикационного поля экрана отсчетный индекс в виде стилизованного изображения самолета при виде сзади с выпущенными шасси ("Самолет"), обозначающий текущее положение ЛА в пространстве, индицируемый на экране подвижный индекс в виде стилизованного изображения самолета при виде сзади с выпущенными шасси, обозначающий требуемое положение ЛА в пространстве ("Лидер"), имеющий возможность поворота вокруг своего центра симметрии, а также перемещения по вертикали и горизонтали относительно индекса "Самолет", генератор символов, соединенный с экраном, средства управления подвижным индексом "Лидер", выполненные в виде блоков вычисления характеристик "Лидера", на входы которых поступают сигналы из систем ЛА, а с выходов которых на генератор символов поступают сигналы в соответствии с величиной ошибки управления по высоте, обеспечивающие перемещение индекса "Лидер" по индикационному полю в вертикальном направлении, по углу тангажа и поворотом его вокруг центра симметрии в соответствии с величиной ошибки по углу крена, увеличением или уменьшением линейных размеров индекса "Лидер" при увеличении или уменьшении соответственно заданной скорости полета таким образом, что при нулевых значениях ошибок по всем контролируемым параметрам индекс "Лидер" совмещается с индексом "Самолет", индекс "Самолет" выполнен с возможностью поворота вокруг своего центра симметрии, а стилизованное изображение индексов "Самолет" и "Лидер" выполнено в виде одной горизонтальной прямой, символизирующей крылья ЛА, и одной вертикальной прямой, символизирующей киль ЛА и пересекающей горизонтальную прямую в ее центре под прямым углом, и дополнительно снабжен блоком вычисления параметров текущего угла скольжения, блоком вычисления значения расчетного угла крена, блоком вычисления расчетного угла скольжения, блоком расчета отклонения ЛА по высоте полета и коэффициента масштаба отклонения высоты полета ЛА, блоком вычисления значения расчетного угла тангажа, блоком расчета бокового отклонения и коэффициента масштаба бокового отклонения ЛА, на входы которых поступают сигналы из систем ЛА, а выходы которых соединены с входами генератора символов, а также выполнен с возможностью индикации индекса "радиовысота" и неподвижной неравномерной шкалы значения высоты полета, индицируемой на вертикальной стороне границы индикационного поля экрана с нулевым значением высоты, расположенным на уровне горизонтальной линии, проходящей через центр индикационного поля экрана, при этом оба индекса "Самолет" и "Лидер" выполнены с возможностью одновременного отображения текущего угла скольжения и угла тангажа индекса "Самолет" и отклонения от заданного угла скольжения и угла тангажа индекса "Лидер" путем индикации треугольника, основание которого равно длине горизонтальной прямой линии символизирующей крылья ЛА, а положение вершины треугольника соответствует текущему значению угла тангажа и угла скольжения индекса "Самолет" и отклонению от заданного значения угла тангажа и угла скольжения индекса "Лидер".
Изобретение поясняется чертежами.
На фиг.1 изображена лицевая часть устройства командно-пилотажного индикатора, отображающего информацию о полете ЛА.
На фиг.2 - Фрагмент полета ЛА на индикационном поле экрана, где изображены стилизованная форма индекса "Лидер", индекса "Самолет" при нулевых углах крена, тангажа и скольжения.
На фиг.3 изображена схема сопряжения систем ЛА с командно-пилотажным индикатором.
На фиг.4 изображена функциональная схема командно-пилотажного индикатора.
На фиг.5 - Фрагмент полета ЛА на индикационном поле экрана, когда индексы "Лидер" и "Самолет" изображают положительный угол тангажа при нулевом значении угла скольжения и нулевом значении угла крена.
На фиг.6 - Фрагмент полета ЛА на индикационном поле экрана, когда индексы "Лидер" и "Самолет" изображают отрицательный угол тангажа при нулевом значении угла скольжения и нулевом значении угла крена.
На фиг.7 - Фрагмент полета ЛА на индикационном поле экрана, когда индексы "Лидер" и "Самолет" изображают левое скольжение при нулевом значении угла тангажа и нулевом значении угла крена.
На фиг.8 - Фрагмент полета ЛА на индикационном поле экрана, когда индексы "Лидер" и "Самолет" изображают правое скольжение при нулевом значении угла тангажа и нулевом значении угла крена.
На фиг.9 - Фрагмент полета ЛА на индикационном поле экрана, когда индексы "Лидер" и "Самолет" изображают одновременно положительный угол тангажа и левое скольжение при нулевом значении угла крена.
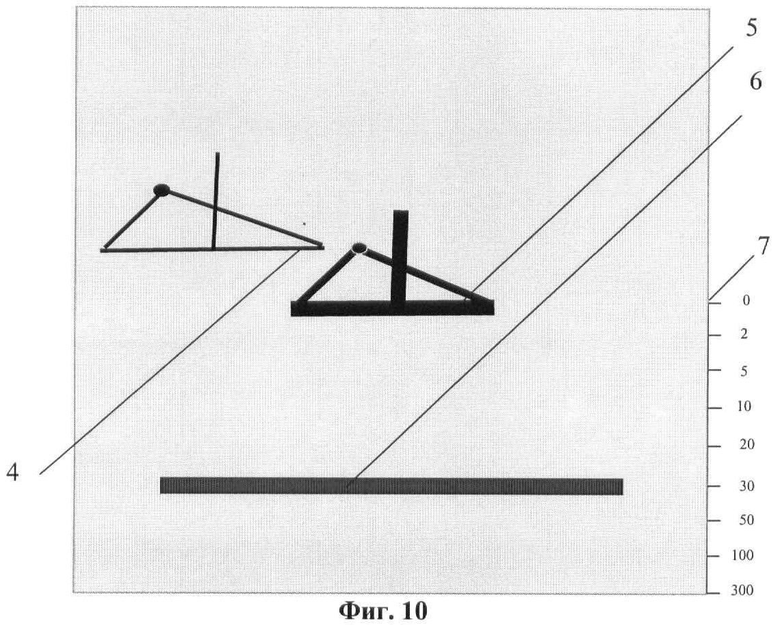
На фиг.10 - Фрагмент полета ЛА на индикационном поле экрана, когда индексы "Лидер" и "Самолет" изображают одновременно положительный угол тангажа и правое скольжение при нулевом значении угла крена.
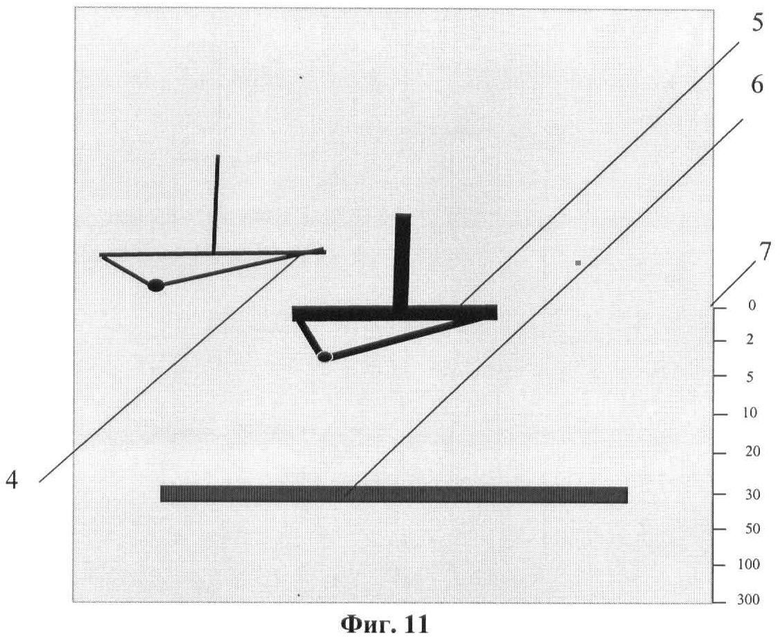
На фиг.11 - Фрагмент полета ЛА на индикационном поле экрана, когда индексы "Лидер" и "Самолет" изображают одновременно отрицательный угол тангажа и правое скольжение при нулевом значении угла крена.
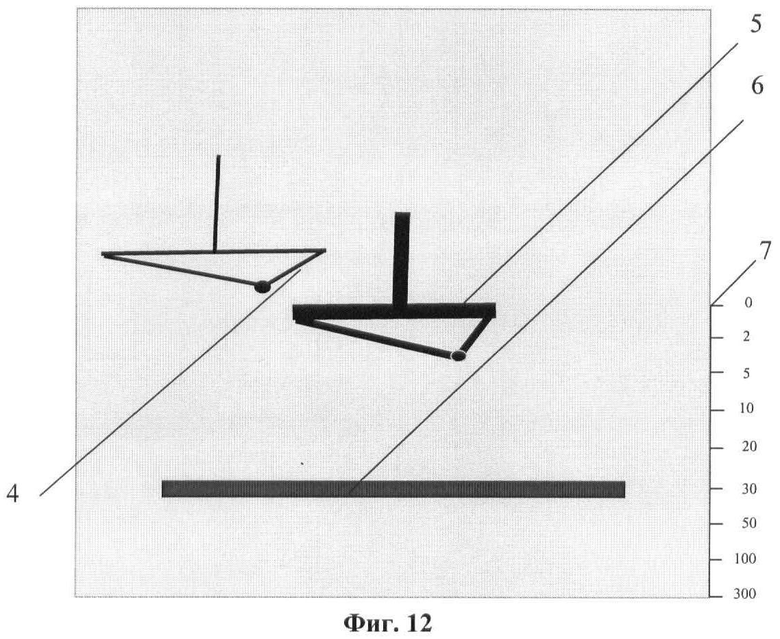
На фиг.12 - Фрагмент полета ЛА на индикационном поле экрана, когда индексы "Лидер" и "Самолет" изображают одновременно отрицательный угол тангажа и левое скольжение при нулевом значении угла крена.
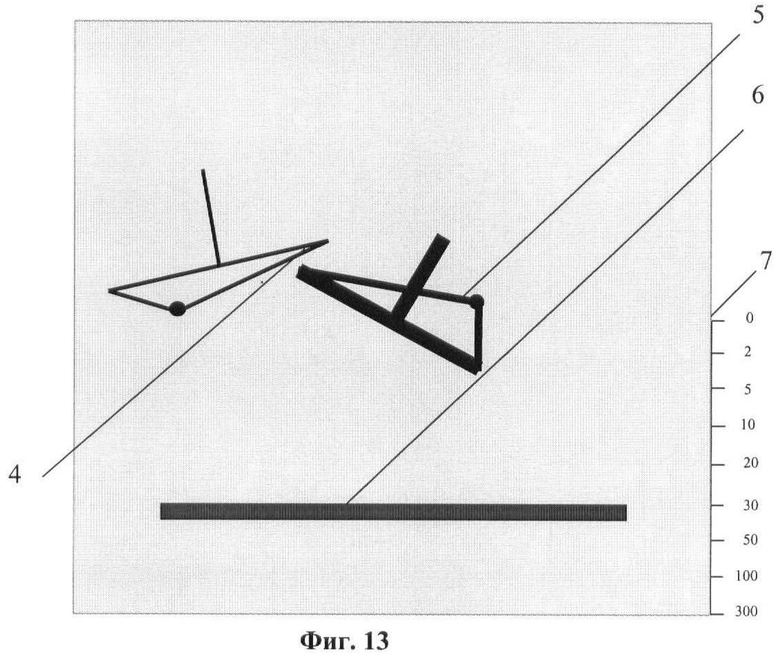
На фиг.13 - Фрагмент полета ЛА на индикационном поле экрана, когда одновременно индицируется положительный угол тангажа, левое скольжение и положительный угол крена для индекса "Самолет" и отрицательный угол тангажа, правое скольжение и отрицательный угол крена для индекса "Лидер".
На фиг.14 - Фрагмент полета ЛА на индикационном поле экрана изображающий текущее угловое положение индексов "Лидер" и "Самолет" в момент отклонения ЛА от заданной траектории полета.
На фиг.15 - Фрагмент полета ЛА на индикационном поле экрана, когда текущее значение вектора скорости ЛА Vтек меньше программно заданного вектора скорости ЛА Vзад. Индекс "Лидер" уменьшается в размерах - "удаляется".
На фиг.16 - Фрагмент полета ЛА на индикационном поле экрана, когда текущее значение вектора скорости ЛА Vтек больше программно заданного вектора скорости ЛА Vзад. Индекс "Лидер" увеличивается в размерах - "приближается".
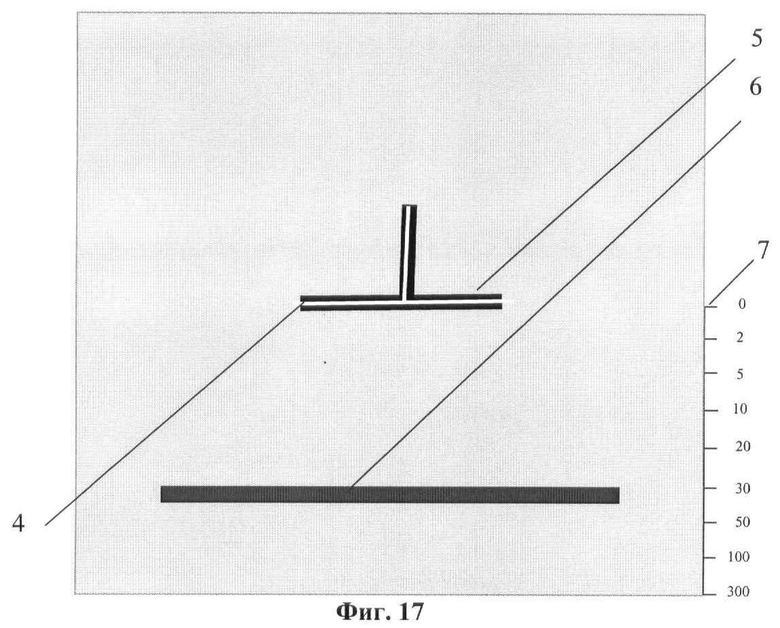
На фиг.17 - Фрагмент полета ЛА на индикационном поле экрана, когда текущее значение вектора скорости ЛА Vтек равно программно заданному вектору скорости ЛА Vзад. Индекс "Лидер" имеет геометрический размер равный геометрическому размеру индекса "Самолет".
На фиг.18 - Фрагмент полета ЛА на индикационном поле экрана, когда скорость полета ЛА больше программно заданной скорости полета, имеется отрицательное отклонение в боковом направлении и превышение высоты полета с положительным углом крена, положительным углом тангажа и левым скольжением.
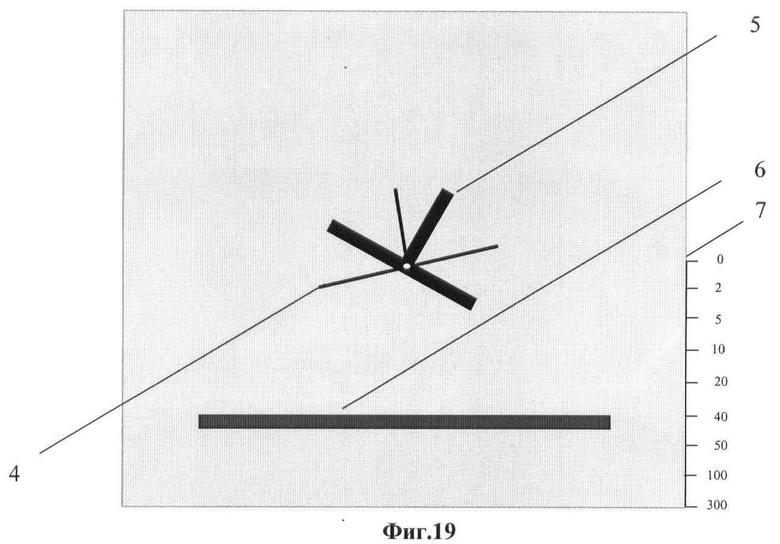
На фиг.19 - Фрагмент полета ЛА на индикационном поле экрана, когда скорость полета ЛА близка к программно задаваемой скорости полета при положительном отклонении по углу крена, без отклонения траектории полета по высоте и в боковом направлении.
На фиг.20 - Фрагмент полета ЛА на индикационном поле экрана, когда скорость полета ЛА меньше программно задаваемой скорости полета, траектория полета ниже программно задаваемой, отклонений по углу крена и углу скольжения нет. Требование индекса "Лидер" - увеличить угол тангажа.
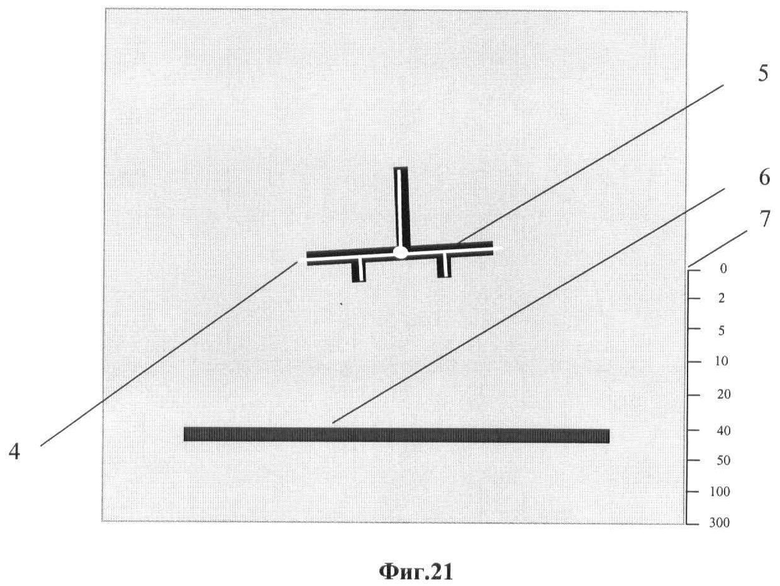
На фиг.21 - Фрагмент посадки ЛА, когда текущая скорость полета, высота полета, угол крена, угол тангажа, угол скольжения ЛА близки к программно задаваемым значениям. Система автоматического управления полетом подсказывает летчику, что при посадке по программе полета в данный момент необходимо исполнить команду "выпустить шасси".
Командно-пилотажный индикатор (фиг.1) состоит из:
- экрана командно-пилотажного индикатора 1, далее экран 1;
- навигационного поля 2 экрана 1;
- индикационного поля 3 экрана 1;
- индицируемого на индикационном поле 3 экрана 1 подвижного индекса, не управляемого летчиком "Лидер" 4, далее "Лидер" 4 (фиг.1), выполненного в виде стилизованного изображения летательного аппарата при виде сзади, визуализирующего отклонения ЛА относительно заданных параметров программной траектории полета, имеющего возможность поворота вокруг своего центра симметрии и свободно перемещающегося по вертикали и по горизонтали относительно центра индикационного поля 3 экрана 1;
- индицируемого на индикационном поле 3 экрана 1 подвижного индекса, управляемого летчиком "Самолет" 5, далее "Самолет" 5 (фиг.1), выполненного в виде стилизованного изображения летательного аппарата при виде сзади, визуализирующего текущее угловое положение ЛА и динамику его изменения в пространстве, имеющего возможность поворота вокруг своего центра симметрии, расположенного в центре индикационного поля 3 экрана 1;
- "Лидер" 4 и "Самолет" 5 представляют (фиг.2) стилизованную форму самолета при виде сзади, которая представлена одной горизонтальной прямой, символизирующей крылья ЛА, и одной вертикальной прямой, символизирующей киль ЛА, причем вертикальная прямая пересекает горизонтальную прямую в ее центре под прямым углом. "Лидер" 4 и "Самолет" 5 (фиг.2) имеют идентичную форму и линии, образующие индексы "Лидер" 4 и "Самолет" 5, выполнены с различной толщиной и яркостью;
- индицируемого на индикационном поле 3 экрана 1 индекса "радиовысоты" 6 (фиг.1), обозначающего представленное в масштабе ее реальное значение и выполненного в виде горизонтальной линии, которая перемещается в индикационном поле 3 экрана 1 по вертикали от центра симметрии "Самолета" 5 до нижней части индикационного поля 3 экрана 1;
- индицируемой на индикационном поле 3 экрана 1 неподвижной неравномерной расположенной на вертикальной стороне границы индикационного поля 3 экрана 1 шкалы значения высоты 7 полета ЛА (фиг.1), далее шкала высоты 7 с нулевым значением высоты полета ЛА, расположенным на уровне горизонтальной линии, проходящей через центр индикационного поля 3 экрана 1;
- индицируемой на навигационном поле 2 экрана 1 различной навигационной информации текущих значений параметров полета 8 ЛА, в частности изображение шкалы вертикальной скорости ЛА, планово-навигационного прибора с подвижной круговой шкалой курса и стрелкой заданного направления (фиг.1).
Для визуализации полетной информации (фиг.3) командно-пилотажный индикатор КПИ 9 принимает и обрабатывает данные от системы автоматического управления полетом САУП 10, в которую поступают параметры полета из основных систем ЛА:
- системы воздушных сигналов СВС 11 - параметры о текущем значении высоты полета ЛА Hтек, о текущем значении вектора скорости ЛА Vтек и текущей проекции вектора вертикальной скорости ЛА Vyg тек;
- инерциальной навигационной системы (ИНС) 12 - параметры об угловом и пространственном положении ЛА: υтек, γтек, φтек, соответственно, текущем значении угла тангажа, текущем значении угла крена, текущем значении угла рыскания и Хтек - текущем значении дальности полета ЛА, Zтек - текущем боковом отклонении ЛА;
- навигационного вычислителя исходных данных (НВ ИД) 13 - параметры трехмерной программной траектории полета в земной системе координат: время полета на маршруте - Т, дальность на маршруте от точки старта - Xзад, высота полета на маршруте - Hзад, боковое отклонение - Zзад, программно задаваемая высота полета ЛА на исполнение команды "убрать шасси" и команды "выпустить шасси" - Hшасси напрямую поступают в систему автоматического управления полетом (САУП) 10 и в навигационный вычислитель расчетных данных (НВ РД) 14, в котором они пересчитываются в дополнительно задаваемые параметры полета ЛА:
- в земной системе координат (ЗСК):
Vxg зад - проекции скорости на ось Xg;
Vyg зад - проекции скорости на ось Yg;
Vzg зад - проекции скорости на ось Zg;
Θзад - угол наклона траектории ЛА;
Ψзад - угол поворота траектории ЛА;
Hшасси - программно задаваемая высота полета ЛА на исполнение команды "убрать шасси" и команды "выпустить шасси".
- в связанной системе координат:
γзад - угол крена,
υзад - угол тангажа,
φзад - угол рыскания.
- навигационного вычислителя расчетных данных (НВ РД) 14, из которого дополнительно задаваемые параметры полета ЛА поступают в систему автоматического управления полетом (САУП) 10.
Вся информация, необходимая летчику для управления полетом ЛА, из системы автоматического управления полетом (САУП) 10 поступает в командно-пилотажный индикатор 9.
В состав КПИ 9 (фиг.4) входит генератор символов (ГС) 15, который вырабатывает команды отображения текущих параметров полета ЛА по сигналам, поступающим из:
- блока вычисления параметров текущего угла скольжения 16;
- блока вычисления значения расчетного угла крена 17;
- блока вычисления расчетного угла скольжения 18;
- блока вычисления коэффициента скорости полета ЛА 19;
- блока расчета отклонения ЛА по высоте полета и коэффициента масштаба отклонения высоты полета ЛА 20;
- блока вычисления значения расчетного угла тангажа 21;
- блока расчета бокового отклонения и коэффициента масштаба бокового отклонения ЛА 22.
Все команды отображения, создаваемые в генераторе символов (ГС) 15, отображаются на экране 1 КПИ 9, с которого летчик считывает необходимую информацию.
Команды отображения генератора символов (ГС) 15 индицируют: "Лидер" 4, "Самолет" 5, индекс "радиовысоты" 6, неподвижную неравномерную шкалу значения высоты 7, команду "убрать шасси" и команду "выпустить шасси" и различную навигационную информацию текущих значений параметров полета 8 ЛА.
Для визуализации "Лидера" 4 (фиг.4) на индикационном поле 3 экрана 1 в генератор символов (ГС) 15 поступают сигналы:
из блока вычисления значения расчетного угла крена 17 поступает значение расчетного угла крена γрасч;
из блока вычисления расчетного угла скольжения 18 поступает значение расчетного угла скольжения βрасч;
из блока вычисления коэффициента скорости полета ЛА 19 поступает значение коэффициента масштаба скорости полета ЛА mV;
из блока расчета отклонения ЛА по высоте полета и коэффициента масштаба отклонения высоты полета ЛА 20 поступает значение коэффициента масштаба отклонения высоты полета ЛА mH;
из блока вычисления значения расчетного угла тангажа 21 поступает значение расчетного угла тангажа υрасч;
из блока расчета бокового отклонения и коэффициента масштаба бокового отклонения ЛА 22 поступает значение коэффициента масштаба бокового отклонения ЛА mZ.
Для визуализации "Самолета" 5 на индикационном поле 3 экрана 1 в генератор символов (ГС) 15 из блока вычисления параметров текущего угла скольжения 16 поступает (фиг.3): текущее значение угла скольжения βтек, текущие значения угла тангажа υтек и текущее значение угла крена γтек.
Для визуализации индекса "радиовысоты" 6 на индикационном поле 3 экрана 1 в генератор символов (ГС) 15 из блока расчета отклонения ЛА по высоте полета и коэффициента масштаба отклонения высоты полета ЛА 20 поступает (фиг.3) текущее значение высоты полета ЛА Hтек.
Для визуализации команды "убрать шасси" и команды "выпустить шасси" для индекса "Лидера" 4 на индикационном поле 3 экрана 1 в генераторе символов (ГС) 15 из блока расчета отклонения ЛА по высоте полета и коэффициента масштаба отклонения высоты полета ЛА 20 поступает (фиг.4) разностный сигнал текущего значения высоты полета ЛА Hтек и программно задаваемой высоты полета ЛА Hзад=Hшасси на исполнение команды "убрать шасси" и команды "выпустить шасси".
Для визуализации неподвижной неравномерной шкалы значения высоты 7 полета ЛА, расположенной на вертикальной стороне границы индикационного поля 3 экрана 1, в генераторе символов (ГС) 15 используются процедуры специализированного языка программирования, которые не являются предметом изобретения и в данном случае не рассматриваются.
В предлагаемом командно-пилотажном индикаторе отдельное представление блоков таких как: сумматор, мультиплексор,
- блоки вычисления характеристик подвижных индексов "Лидер" 4 и "Самолет" 5;
- блоки определения достоверности входной информации;
- средства отображения на экране символов фигур в соответствии с положением и состоянием ЛА;
- устройства и другие элементы, выполняющие прием и обработку пилотажно-навигационной информации, используемой для управления фигурами, символами, подвижными шкалами, указателями и другими элементами формата изображения на фиг.3 не показаны.
Для обеспечения работы командно-пилотажного индикатора необходима исходная информация из блока системы автоматического управления полетом (САУП) 10 (фиг.3) ЛА, в которую поступают данные о динамических и траекторных параметрах полета из системы воздушных сигналов (СВС) 11, инерциальной навигационной системы (ИНС) 12, навигационного вычислителя исходных данных (НВ ИД) 13 и навигационного вычислителя расчетных данных (НВ РД) 14.
Измеряя текущие траекторные и текущие угловые параметры полета ЛА, инерциальная навигационная система (ИНС) 12 выдает в систему автоматического управления полетом (САУП) 10: текущее значение угла крена - γтек, текущее значение угла тангажа - υтек, текущее значение угла рыскания - φтек, текущее значение дальности полета - Xтек, текущее боковое отклонение - Zтек.
В блок системы автоматического управления полетом (САУП) 10 ЛА также поступают данные от навигационных вычислителей, которые передают параметры опорной траектории полета и рассчитывают дополнительные навигационные параметры для обеспечения программной траектории полета ЛА. Навигационные вычислители ЛА содержат не только данные траекторных параметров полета, но и включают в себя аэродинамические характеристики ЛА, инерционно-массовые, весовые и другие параметры, от которых зависит и безопасность полета, и залог выполнения поставленной задачи. Эти данные важны, но не относятся к предмету изобретения и поэтому в заявляемом предложении не рассматриваются. Для заявляемого изобретения, при визуализации индексов "Лидер" 4 и "Самолет" 5, важны траекторные параметры, т.к. они на экране КПИ создают образное взаимное пространственное и угловое положение индексов, идентичное реальному ЛА и виртуальному лидеру с аэродинамическими и инерционно-массовыми характеристиками реального ЛА.
Параметры опорной траектории полета ЛА вводятся в программу навигационного вычислителя исходных данных (НВ ИД) 13 в виде числовых значений параметров узловых точек программно задаваемой траектории полета ЛА в земной системе координат: T - время полета на маршруте, Xзад - дальность на маршруте от точки старта, Hзад - высота полета на маршруте, Zзад - боковое отклонение на маршруте, Hшасси - программно задаваемая высота полета ЛА на исполнение команды "убрать шасси" и команды "выпустить шасси".
Программно задаваемые параметры траектории полета ЛА алгоритмически обрабатываются в навигационном вычислителе исходных данных (НВ ИД) 13 и передаются в блок навигационного вычислителя расчетных данных (НВ РД) 14, где пересчитываются в дополнительно задаваемые параметры полета ЛА: - для земной системы координат (ЗСК): Vxg зад - проекции скорости на ось Xg, Vyg зад - проекции скорости на ось Yg, Vzg зад - проекции скорости на ось Zg, Θзад - угол наклона траектории ЛА, Ψзад - угол поворота траектории ЛА и для связанной системы координат (ССК): γзад - угол крена, υзад - угол тангажа, φзад - угол рыскания.
Совместно параметры опорной траектории полета ЛА и вычисленные дополнительно задаваемые параметры полета ЛА представляют набор данных программно задаваемой траектории полета ЛА в функции от времени, что позволяет выдерживать на траектории полета не только пространственные, но и угловые параметры ЛА в полете.
В отличие от прототипа, в котором траектория полета разбивается на горизонтальный участок и траекторию посадки, для функционирования заявляемого - пилотажного индикатора используется программно задаваемая траектория полета ЛА в функции от времени в трехмерной декартовой земной системе координат.
Набор данных программно задаваемой траектории полета ЛА в функции от времени поступает из блока навигационного вычислителя исходных данных (НВ ИД) 13 и блока навигационного вычислителя расчетных данных (НВ РД) 14 в систему автоматического управления полетом (САУП) 10, в которой окончательно рассчитывается предстоящая траектория полета ЛА в виде задаваемых параметров.
Кроме набора данных программно задаваемой траектории полета ЛА для обеспечения работы командно-пилотажного индикатора необходимы текущие значения параметров траектории полета ЛА, которые измеряются системой воздушных сигналов (СВС) 11, образуя набор данных: о текущем значении высоты полета ЛА - Hтек, о текущем значении вектора скорости ЛА - Vтек и текущей проекции вектора вертикальной скорости ЛА - Vyg, которые выдаются в текущий момент времени в систему автоматического управления полетом (САУП) 10 для обеспечения работы алгоритмов функций разностных значений программно задаваемых параметров и текущих параметров полета ЛА.
Главным на борту ЛА является летчик, для которого командно-пилотажный индикатор обеспечивает индикацию надежного безопасного полета и оптимального выполнения поставленной задачи, поэтому в систему автоматического управления полетом (САУП) 10 поступают команды от летчика, анализирующего полет по визуальному представлению на индикационном поле 3 экрана 1 командно-пилотажного индикатора КПИ 9. В зависимости от визуального представления полетной обстановки, представляемой на индикационном поле 3 экрана 1, летчик, управляя ЛА, выбирает либо режим полета с директорной зависимостью управления, либо режим с отключенной директорной зависимостью управления. Выбирая директорную зависимость режима, летчик использует либо автоматическое управление полетом, т.е. функцию летчика-оператора, либо использует режим ручного управления полетом. Выбирая режим полета с отключенной директорной зависимостью, летчик управляет полетом в режиме ручного свободного управления полетом и передает выбранную команду режима управления на исполнение системе автоматического управления полетом (САУП) 10.
Из системы автоматического управления полетом (САУП) 10 выходные данные текущих параметров траектории полета и заданные параметры траектории полета ЛА, относящиеся к пространственным, скоростным, угловым параметрам ЛА для подвижных индексов "Лидер" 4 и "Самолет" 5, данным о "радиовысоте" 6, команде "убрать шасси", команде "выпустить шасси" и данным для "визуализации навигационных приборов", передаются в командно-пилотажный индикатор КПИ 9 на функциональные блоки 16÷22, в которых вырабатываются визуализирующие сигналы для генератора символов (ГС) 15 (фиг.4), в котором формируется и передается на индикационное поле 3 экрана 1 полетная обстановка на маршруте ЛА.
В командно-пилотажном индикаторе КПИ 9 внутренним языком программирования формируется образ неподвижной неравномерной шкалы значения высоты 7 полета ЛА, который также передается на индикационное поле 3 экрана 1. Неподвижная неравномерная шкала значения высоты 7 полета ЛА располагается на вертикальной стороне границы индикационного поля 3 экрана 1.
Неподвижная неравномерная шкала значения высоты 7 полета ЛА позволяет летчику любой квалификации не отвлекаться на индицируемое значение текущей высоты полета, если она (высота) выше максимального значения представленной на предлагаемой в изобретении неподвижной неравномерной шкале значения высоты 7 полета ЛА. При значениях текущей высоты полета ЛА, близких к максимальному значению неподвижной неравномерной шкалы значения высоты 7 полета ЛА, перемещение индекса "радиовысота" 6 на индикационном поле 3 экрана 1 практически незаметно и не отвлекает внимание летчика от выполнения поставленной ему задачи полета.
При той текущей высоте полета ЛА, когда летчику необходимо быть особенно внимательным (предпосадочные режимы или полет на малых высотах), скорость перемещения индекса "радиовысота" 6 на индикационном поле 3 экрана 1 возрастает в соответствии с шагом разметки неравномерной шкалы значений высоты полета ЛА. Перемещение индекса "радиовысота" 6 на индикационном поле 3 экрана 1 привлекает внимание летчика для выполнения маневра, связанного с изменением высоты. Скорость перемещения индекса "радиовысота" 6 на индикационном поле 3 экрана 1 возрастает, если уменьшается высота полета ЛА. Чем ниже высота полета ЛА, тем быстрее индекс "радиовысота" 6 перемещается к центру индикационного поля 3 экрана 1, привлекая внимание летчика изменяющейся картиной индикационного поля 3 экрана 1. Параметр быстро меняющейся высоты полета обращает внимание летчика именно на этот фактор траектории полета и формально предупреждает его о готовности к действиям, вызванным текущей высотой полета, вплоть до приборного планового или аварийного приземления. Летчик всегда обратит внимание на перемещение индекса "радиовысота" 6, что обеспечит ему надежность и безопасность полета без стрессовых нагрузок в любых экстремальных полетных условиях при дефиците времени и внимания.
Для летчика угловое положение его ЛА на индикационном поле 3 экрана 1 идентифицируется угловым положением индекса "Самолет" 5 по параметрам углового положения ЛА в данный момент времени: текущего угла скольжения - βтек, текущего значения угла тангажа - υтек и текущего значения угла крена - γтек.
Текущий угол скольжения βтек вычисляется процедурой с использованием выходных данных угловых текущих параметров траектории полета ЛА (фиг.4), поступающих из системы автоматического управления полетом (САУП) 10: υтек - текущее значение угла тангажа, γтек - текущее значения угла крена, φтек - текущее значение угла рыскания, Ψтек - значение угла поворота траектории ЛА, Θтек - значение текущего угла наклона траектории ЛА, которые передаются в блок вычисления параметров текущего угла скольжения 16, где выходные данные угловых текущих параметров траектории полета ЛА и выходные данные текущего углового положения вектора скорости преобразуются в матрицы перехода от «связанной системы координат к земной системе координат» и от «земной системы координат к скоростной системе координат», соответственно. Процедурой перемножения матриц получается новая матрица с элементами угла атаки и угла скольжения на траектории полета ЛА в текущий момент времени. На выходе блока вычисления текущего угла скольжения 16 текущее значение угла крена - γтек, текущее значение угла тангажа - υтек и текущее значение угла скольжения - βтек используются как визуализирующие сигналы для индекса "Самолет" 5 на индикационном поле 3 экрана 1.
Индекс "Лидер" 4 индицируется на индикационном поле 3 экрана 1 для текущего момента времени расчетным значением угла крена - γрасч, расчетным значением угла тангажа - υрасч и расчетным значением угла скольжения - βрасч.
В отличие от прототипа величина угла крена индекса "Лидер" 4 вычисляется как сумма текущего значения угла крена ЛА, управляемого летчиком - γтек, программно заданного угла крена ЛА на маршруте полета - γзад и поправочного значения угла крена - γппр, которое зависит от величины бокового отклонения ЛА от заданной траектории полета.
Для этого в блок вычисления значения расчетного угла крена 17 из системы автоматического управления полетом (САУП) 10 поступают: γтек - текущее значение угла крена, Zтек - текущее боковое отклонение, γзад - заданное значение угла крена, Zзад - боковое отклонение задаваемой координаты в программе полета ЛА. Значение вычисленного бокового отклонения траектории ЛА ΔZ=(Zтек-Zзад) поступает в функцию вычисления поправочного значения угла крена γппр. Сумма текущего значения угла крена γтек, заданного угла крена γзад и поправочного значения угла крена γппр - есть значение расчетного угла крена γрасч=(γтек+γзад+γппр), которое передается в генератор символов (ГС) 15 (фиг.4) как визуализирующий сигнал на подвижный неуправляемый летчиком индекс "Лидер" 4 в индикационном поле 3 экрана 1.
Визуализируемое для индекса "Лидер" 4 расчетное значение угла скольжения - βрасч поступает из блока вычисления расчетного угла скольжения 18, в который от системы автоматического управления полетом (САУП) 10 поступают входные данные программно заданного углового положения ЛА на траектории: γзад - угол крена, υзад - угол тангажа, φзад - угол рыскания и входные данные программно заданных значений углов пространственного положения вектора скорости ЛА, Ψзад - угол поворота траектории ЛА и Θзад - угла наклона траектории ЛА. Поступившие входные данные преобразуются в матрицы перехода от «связанной заданной программно системы координат к земной системе координат» и от «земной системы координат к скоростной заданной программно системе координат», соответственно. В результате процедуры перемножения матриц получаем новую матрицу с расчетными элементами заданных программно углов атаки и углов скольжения на траектории полета ЛА для заданного момента времени. Значение βрасч - значение расчетного угла скольжения, заданного программно, используем как визуализирующий сигнал для индекса "Лидер" 4 в индикационном поле 3 экрана 1.
Для учета влияния текущей скорости полета ЛА выходные данные Vзад - заданного программно значения вектора скорости ЛА и Vтек - текущего значения вектора скорости ЛА от (фиг.4) системы автоматического управления полетом (САУП) 10 подаем в блок вычисления коэффициента масштаба скорости полета ЛА 19, где величины выходных данных сравниваются. Величина отклонения текущей скорости полета ЛА от заданной скорости полета ΔV=(Vзад-Vтек) масштабируется и, как визуализирующий сигнал коэффициента масштаба скорости полета ЛА mV, подается в генератор символов (ГС) 15 для индикации увеличения или уменьшения подобия геометрического размера фигуры индекса "Лидер" 4.
Для визуализации на индикационном поле 3 экрана 1 отклонения ЛА по высоте от программно заданной траектории полета подаем на индекс "Лидер" 4 отклонение по высоте, пропорциональное коэффициенту масштаба отклонения по высоте полета ЛА mH, который вычисляется в блоке расчета отклонения ЛА по высоте полета и коэффициента масштаба отклонения высоты полета ЛА 20 по выходным данным Hзад - заданной программно высоты полета ЛА на маршруте и Hтек - текущего значения высоты полета ЛА (фиг.4), поступающим от системы автоматического управления полетом (САУП) 10. Заданная программно высота полета ЛА на маршруте и текущее значение высоты полета ЛА сравниваются. Отклонение ЛА на траектории по высоте полета ΔH=(Hзад-Hтек) масштабируется в параметр коэффициента масштаба отклонения высоты полета ЛА mH и как управляющий сигнал коэффициента масштаба отклонения mH передается в генератор символов (ГС) 15 для выработки пространственного положения на индикационном поле 3 экрана 1 масштабного отклонения индекса "Лидер" 4 относительно центра индикационного поля 3 экрана 1, в котором находится индекс "Самолет" 5 (фиг.14).
Величина отклонения ЛА на траектории по высоте полета ΔH=(Hзад-Hтек) компенсируется параметром расчетного угла тангажа υрасч, который является одним из факторов возникающих отклонений. Для того чтобы получить расчетный угол тангажа из системы автоматического управления полетом (САУП) 10 значения υзад - заданного угла тангажа, Hзад - заданной программой высоты полета на маршруте, υтек - текущего угла тангажа ЛА, Hтек - текущей высоты полета ЛА подаются на вход блока вычисления значения расчетного угла тангажа 21, в котором вычисленное отклонение ЛА по высоте полета ΔH=(Hтек-Hзад) поступает на обработку функции для расчета поправочного значения угла тангажа υппр. Сумма текущего значения угла тангажа υтек, заданного угла тангажа υзад и поправочного значения угла тангажа υппр - есть значение расчетного угла тангажа υрасч=(υтек+υзад+υппр), которое передается в генератор символов (ГС) 15 (фиг.4) и из которого в качестве визуализирующего сигнала поступает на подвижный не управляемый летчиком индекс "Лидер" 4.
Визуализируемая фигура индекса "Лидер" 4 для текущего момента времени полностью представляет на индикационном поле 3 экрана 1 задаваемое программно угловое положение на траектории полета ЛА по данным параметров расчетных значений углов: расчетное значение угла крена - γрасч, расчетное значение угла тангажа - υрасч и расчетное значение угла скольжения - βрасч.
Визуализация на индикационном поле 3 экрана 1 отклонения ЛА в боковом направлении от программно заданной траектории полета дополняет индикационную картину пространственного отклонения ЛА, углового отклонения и скоростного отклонения на траектории маршрута. Летчик видит достоверную информацию об отклонениях от заданных параметров траектории полета и в любой момент исполнит безопасный маневр на исправление возникшей ситуации, что обеспечивает летчику уверенность, надежность и безопасность в полете даже в экстремальных условиях при дефиците времени и внимания.
Для вычисления отклонения ЛА в боковом направлении от программно заданной траектории полета, выходные данные системы автоматического управления полетом (САУП) 10 (фиг.4) Zзад - боковое отклонение задаваемой программно координаты полета ЛА и Zтек - текущее боковое отклонение траектории полета ЛА подаем в блок расчета бокового отклонения и коэффициента масштаба бокового отклонения ЛА 22, в котором величины выходных данных сравниваются. Боковое отклонение траектории ЛА ΔZ=(Zзад-Zтек) масштабируется в значение коэффициента масштаба бокового отклонения ЛА mZ. В качестве управляющего сигнала коэффициент масштаба отклонения mZ передается в генератор символов (ГС) 15 для выработки положения масштабного отклонения индекса "Лидер" 4, визуализируя масштаб ΔZ бокового отклонения траектории ЛА относительно центра индикационного поля 3 экрана 1, в котором находится индекс "Самолет" 5 (фиг.14).
Предлагаемый командно-пилотажный индикатор, сохраняя надежность и безопасность полета в соответствии с предлагаемой схемой сопряжения систем ЛА с командно-пилотажным индикатором (фиг.3) и функциональной схемой командно-пилотажного индикатора (фиг.4), позволяет исполнять команды напоминания о выполнении каких-либо процедур полета. Например: после взлета на высоте большей, чем Hшасси, выполнить команду "убрать шасси", а перед посадкой на высоте меньшей, чем Hшасси - выполнить команду "выпустить шасси". Для этого выходной параметр системы автоматического управления полетом (САУП) 10, полученный от навигационного вычислителя исходных данных (НВ ИД) 13 в виде признака траектории полета ЛА со значением Hшасси - максимальная высота полета ЛА с выпущенными шасси, на которой летчику напоминается, что на взлете при условии (Hтек>Hшасси) необходимо исполнить команду «убрать шасси», на траектории посадки при условии (Hтек<Hшасси) необходимо исполнить команду «выпустить шасси». Hшасси - максимальная высота полета ЛА с выпущенными шасси и полученное от системы воздушных сигналов (СВС) 11 Hтек - текущее значение высоты полета ЛА сравниваются и, когда текущая высота полета ЛА на траектории посадки Hтек будет меньше программно задаваемой высоты полета ЛА на траектории с выпущенными шасси Hшасси, визуализирующая команда "выпустить шасси" подается из генератора символов (ГС) 15 в индикационное поле 3 экрана 1 на индекс "Лидер" 4. Команда "выпустить шасси" индицируется в виде двух линий, которые возникают под горизонтальными линиями, символизирующими крылья стилизованного ЛА индекса "Лидер" 4.
Летчик, наблюдая на индикационном поле 3 экрана 1 индекс "Лидер" 4 с визуализированной командой напоминания "убрать шасси" на взлете и "выпустить шасси" перед посадкой, всегда будет застрахован от случая летать с выпущенными шасси и никогда не совершит посадку ЛА с аварийными последствиями без выпущенных шасси.
Индицированная на индикационном поле 3 экрана 1 команда напоминания индекса "Лидер" 4 о положении шасси на траектории полета ЛА отрабатывается летчиком из кабины включением тумблера с позицией "выпустить шасси" или "убрать шасси". Выбранная летчиком команда передается в систему автоматического управления полетом (САУП) 10, затем в командно-пилотажный индикатор 9 и в генератор символов (ГС) 15 на индекс "Самолет" 5, тем самым визуализируя выбранную летчиком команду управления шасси.
Представленный на индикационном поле 3 экрана 1 индекс образной "радиовысоты" 6 - это преобразованное текущее значение высоты полета ЛА Hтек, которое в генераторе символов (ГС) 15 КПИ как визуализирующий сигнал в масштабе ее реального значения представляется в виде горизонтальной прямой линии, которая перемещается по вертикали вверх-вниз на индикационном поле 3 экрана 1 от индекса "Самолета" 5 до нижней части индикационного поля 3 экрана 1, в соответствии со значением неподвижной неравномерной шкалы значения высоты полета ЛА, расположенной на вертикальной стороне границы индикационного поля 3 экрана 1, причем нулевое значение шкалы расположено на уровне горизонтальной прямой, проходящей через точку центра симметрии индекса "Самолет". Совокупность визуального представления образной "радиовысоты" 6 и неподвижной неравномерной шкалы значения высоты полета ЛА не отвлекает внимание летчика от выполнения поставленной задачи полета и в тоже время обеспечивает надежность и безопасность полета без стрессовых нагрузок.
Неподвижная неравномерная шкала значения высоты полета ЛА формируется стандартным внутренним языком программирования генератора символов (ГС) 15 КПИ (фиг.4) и индицируется на границе индикационного поля 3 экрана 1, причем нулевое значение шкалы расположено на уровне горизонтальной прямой, проходящей через точку центра симметрии индекса "Самолет" 5. Неподвижная неравномерная шкала значения высоты 7 полета ЛА представлена на (фиг.1, 2) и (фиг.5-21).
Из выходных параметров системы автоматического управления полетом (САУП) 10 в генераторе символов (ГС) 15 вырабатываются визуализирующие сигналы для представления на навигационном поле 2 экрана 1 представления навигационных приборов, отражающих параметры текущей траектории полета ЛА.
Визуализирующими сигналами на индикационном поле 3 экрана 1 индицируется полное пространственное и угловое положения ЛА, управляемого летчиком, через визуализирующие сигналы для формирования индексов: - "Лидер" 4, - "Самолет" 5, - "Радиовысота" 6, - индекса неподвижной неравномерной шкалы 7 значения высоты полета ЛА, расположенного на границе индикационного поля 3 экрана 1 и представления значений: расчетного угла тангажа - υрасч, текущего угла тангажа - υтек, расчетного угла крена - γрасч, текущего угла крена - γтек, текущего значения угла скольжения - βтек, значения расчетного угла скольжения - βрасч, текущего значения высоты полета ЛА по данным радиовысотомера - Нтек.
Выбранная стилизованная форма ЛА видом сзади, в виде двух взаимно перпендикулярных линий подразумевает для индексов "Лидер" 4 и "Самолет" 5 две взаимно перпендикулярные шкалы отсчета для угла тангажа и угла скольжения, нулевая отметка шкал которых располагается в центре горизонтальной линии. Градуировка шкал отсутствует, т.к. летчику нет необходимости вглядываться в значения индицируемых углов из-за того, что точное угловое положение ЛА, идентифицируемое индексом "Самолет" 5, определяется угловым положением индицируемого индекса "Лидер" 4. Выбранная стилизованная форма ЛА видом сзади, в виде двух взаимно перпендикулярных линий подразумевает для индексов "Лидер" 4 и "Самолет" 5 функцию подвижной системы координат «угол тангажа - угол скольжения», в которой по оси абсцисс - вдоль прямой, символизирующей правое крыло ЛА, располагаются отрицательные значения угла скольжения, а вдоль прямой, символизирующей левое крыло ЛА, располагаются положительные значения угла скольжения, по оси ординат - вдоль прямой, символизирующей киль ЛА, располагаются положительные значения угла тангажа, а вдоль прямой, символизирующей продолжение киля ЛА, в противоположную сторону располагаются отрицательные значения угла тангажа. Центр горизонтальной прямой линии, символизирующей крылья ЛА - есть точка центра симметрии, относительно которой индексы "Лидер" 4 и "Самолет" 5 поворачиваются, визуализируя расчетный угол крена - γрасч и текущий угол крена - γтек, соответственно. Точка центра симметрии индекса "Самолет" 5 неподвижна и располагается в центре индикационного поля 3 экрана 1.
Точка центра симметрии индекса "Лидер" 4 перемещается по всему индикационному полю 3 экрана 1 в зависимости от визуализирующих сигналов, вырабатываемых в генераторе символов (ГС) 15 КПИ 9. Поворот индекса "Самолет" 5 относительно точки центра симметрии визуально представляет знак и величину текущего угла крена ЛА, управляемого летчиком - γтек. Текущий положительный угол крена для индекса "Самолет" 5, идентифицирующий ЛА, управляемый летчиком, соответствует наклону вправо (по направлению часовой стрелки) вертикальной прямой, символизирующей киль ЛА, наклон влево (против направления часовой стрелки) - соответствует отрицательному значению угла крена.
Угол тангажа и угол скольжения для индексов "Лидер" 4 и "Самолет" 5 в генераторе символов (ГС) 15 представлены визуализирующим сигналом одновременной индикации в виде треугольника. Основание треугольника равно длине горизонтальной прямой линии, символизирующей крылья ЛА, а положение вершины треугольника соответствует значению угла тангажа и угла скольжения в координатах подвижной системы координат "угол тангажа - угол скольжения" для индексов "Лидер" 4 и "Самолет" 5 соответственно. Визуально на индикационном поле 3 экрана 1 при положительном значении угла тангажа и нулевом угле скольжения вершина треугольника расположена на вертикальной прямой линии, которая символизирует киль ЛА (фиг.5). Фрагмент полета ЛА, визуализированный на индикационном поле 3 экрана 1 для индексов "Лидер" 4 и "Самолет" 5, изображает положительный угол тангажа при нулевом угле скольжения и нулевом угле крена (фиг.5). При отрицательном значении угла тангажа вершина треугольника расположена на прямой линии, символизирующей продолжение киля ЛА в противоположную сторону (фиг.6). Фрагмент полета ЛА, визуализированный на индикационном поле 3 экрана 1 для индексов "Лидер" 4 и "Самолет" 5, изображает отрицательный угол тангажа при нулевом угле скольжения и нулевом угле крена (фиг.6).
Летчик на индикационном поле 3 экрана 1 видит угол скольжения при нулевом значении угла тангажа как точку вершины треугольника с нулевой высотой, расположенной на горизонтальной прямой, которая символизирует крылья ЛА. Расстояние между вертикальной прямой линией, символизирующей киль ЛА, и точкой, расположенной на горизонтальной прямой линии, символизирующей крылья ЛА в системе координат «угол тангажа - угол скольжения», визуализирует величину угла скольжения для индекса "Лидер" 4 и для индекса "Самолет" 5. При отрицательном угле скольжения точка располагается справа относительно вертикальной прямой линии, символизирующей киль ЛА, показывая летчику левое скольжение ЛА. Фрагмент полета ЛА на индикационном поле 3 экрана 1, когда индексы "Лидер" 4 и "Самолет" 5 изображают левое скольжение при нулевом значении угла тангажа и нулевом значении угла крена (фиг.7). При положительном угле скольжения (фиг.8) точка располагается слева относительно вертикальной прямой линии, символизирующей киль ЛА, показывая летчику правое скольжение ЛА. Фрагмент полета ЛА на индикационном поле 3 экрана 1, когда индексы "Лидер" 4 и "Самолет" 5 изображают положительный угол скольжения при нулевом значении угла тангажа и нулевом значении угла крена представлен на фигуре 8.
Предлагаемая схема сопряжения систем ЛА с командно-пилотажным индикатором (фиг.3) и функциональная схема командно-пилотажного индикатора (фиг.4) формируют на индикационном поле 3 экрана 1 любые возможные комбинации одновременного представления расчетного угла тангажа, расчетного угла скольжения и расчетного угла крена для индекса "Лидер" 4 и текущего угла тангажа, текущего угла скольжения и текущего угла крена для индекса "Самолет" 5.
Возможность летчику видеть комбинации одновременного представления угла тангажа, угла скольжения и угла крена для индекса "Лидер" 4 и индекса "Самолет" 5 обеспечивает ему (летчику) надежность и безопасность полета. На индикационном поле 3 экрана 1 (фиг.9) представлен фрагмент полета ЛА при одновременной индикации положительного угла тангажа и левого скольжения при нулевом значении угла крена для индекса "Лидер" 4 и индекса "Самолет" 5. В представленном интуитивно-понятном образе геометрической формы углов летчик мгновенно определяет угловое положение своего ЛА, визуализированного индексом "Самолет" 5, и пространственное положение относительно заданной траектории полета по положению индекса "Лидер" 4 на индикационном поле 3 экрана 1.
Фрагмент полета ЛА при одновременной индикации положительного угла тангажа и правого скольжения при нулевом значении угла крена представлен для индекса "Лидер" 4 и индекса "Самолет" 5 на фигуре 10 индикационного поля 3 экрана 1. Фрагмент полета ЛА при одновременной индикации отрицательного угла тангажа и правого скольжения при нулевом значении угла крена представлен для индекса "Лидер" 4 и индекса "Самолет" 5 на фигуре 11 индикационного поля 3 экрана 1. Фрагмент полета ЛА при одновременной индикации отрицательного угла тангажа и левого скольжения при нулевом значении угла крена представлен для индекса "Лидер" 4 и индекса "Самолет" 5 на фигуре 12 индикационного поля 3 экрана 1.
Индикация на индикационном поле 3 экрана 1 фрагмента полета ЛА текущего положительного угла тангажа, левого скольжения и текущего положительного угла крена для индекса "Самолет" 5 и одновременная индикация углового положения индекса "Лидер" 4, при которой обеспечивается исполнение скорейшего (по времени) маневра сближения с параметрами программно заданной траектории полета ЛА, задаваемой в данный момент времени расчетными значениями отрицательного угла тангажа, правым скольжением и отрицательным углом крена для индекса "Лидер" 4, представлена на фигуре 13 индикационного поля 3 экрана 1.
Индекс "Самолет" 5 в предлагаемом командно-пилотажном индикаторе выполнен подвижным по углу крена вокруг своего центра симметрии, что позволяет летчику идентифицировать реальный угол крена управляемого им (летчиком) ЛА и одновременно визуально оценивать на подвижной фигуре индекса "Самолет" 5 угол тангажа и угол скольжения его ЛА на траектории полета. В отличие от прототипа, предлагаемая фигура индекса "Самолет" 5 поворачивается вокруг своего центра симметрии, одновременно визуализируя текущее угловое положение управляемого летчиком ЛА: текущий угол крена ЛА, текущий угол тангажа ЛА, текущий угол скольжения ЛА.
Обозначение углового положения индекса "Самолет" 5 с положительным текущим значением угла крена - γтек, с положительным текущим значением угла тангажа - υтек и с левым текущим значением угла скольжения - βтек представлено в центре индикационного поля 3 экрана 1 на фигуре 14.
Визуализирующие сигналы для не управляемого летчиком (фиг.4) подвижного индекса "Лидер" 4 в генераторе символов ГС (15) описывают: значение расчетного угла крена - γрасч, значение расчетного угла тангажа - υрасч, значение расчетного угла скольжения - βрасч, отклонение ЛА по высоте полета - ΔH, боковое отклонение ЛА относительно программно заданной траектории ЛА - ΔZ, заданную скорость полета ЛА - Vзад, отклонение от нее ΔV с учетом заданного времени прибытия на конечный пункт маршрута и команды "убрать шасси" и "выпустить шасси".
Знак и величина расчетного угла крена γрасч визуально представляется в индикационном поле 3 экрана 1 поворотом индекса "Лидер" 4 вокруг его центра симметрии. Величина положительного расчетного угла крена для индекса "Лидер" 4 визуализируется наклоном вправо (по направлению часовой стрелки) вертикальной прямой, символизирующей киль ЛА, наклоном влево (против направления часовой стрелки) - визуализируется отрицательный расчетный угол крена.
Расчетный угол крена - γрасч, на индикационном поле 3 экрана 1 представлен поворотом фигуры индекса "Лидер" 4 вокруг его центра симметрии на угол крена γрасч, который для летчика, управляющего ЛА, является рекомендуемым отклонением ЛА по углу крена, при котором будет скорейший (по времени) маневр минимизации отклонения ЛА в боковом направлении, относительно программно заданной траектории полета ЛА.
На фигуре 14 представлено положение фигуры индекса "Лидер" 4, на которую подается вычисленный в генераторе символов (ГС) 15 отрицательный (наклонен влево) расчетный угол крена - γрасч, обеспечивающий маневр скорейшей (по времени) минимизации отклонения ЛА в боковом направлении относительно программно заданной траектории полета ЛА.
В режиме директорного автоматического управления полетом, т.е. исполняя функцию летчика-оператора, летчик наблюдает на индикационном поле 3 экрана 1 изменение взаимного углового положения индекса "Лидер" 4 и индекса "Самолет" 5. Если летчик желает вмешаться в процесс управления полетом, то он переходит в режим ручного управления полетом, передавая эту команду на исполнение в систему автоматического управления полетом (САУП) 10.
Летчик, управляя органами управления своего ЛА и, соответственно, изменяя текущий угол крена, текущий угол тангажа и текущий угол скольжения, визуально наблюдая на индикационном поле 3 экрана 1 изменение формы индекса "Самолет" 5, идентифицирующего угловое положение его реального ЛА и изменение углового и пространственного положения индекса "Лидер" 4, визуализирующего отклонения ЛА от программно заданной траектории полета, добивается совмещения индексов "Лидер" 4 и индекса "Самолет" 5 по форме, размеру и положению.
В полете индекс "Лидер" 4 в реальном времени на индикационном поле 3 экрана 1 отражает полетную обстановку, показывая летчику отклонения по углам и пространству от программно заданной траектории полета. Представленная на фигуре 14 форма индекса "Лидер" 4 индицируется с отрицательным значением расчетного угла крена γрасч, с отрицательным значением расчетного угла тангажа υрасч и с правым (положительным) значением расчетного угла скольжения βрасч в своей подвижной системе координат "угол тангажа - угол скольжения". Летчик по форме индекса "Лидер" 4 мгновенно представляет (в пространстве земной системы координат) предлагаемый маневр для своего ЛА и, если необходимо, летчик совершает маневр, исправляя текущее угловое положение своего ЛА (γтек, υтек, βтек) на угловое положение, предлагаемое индексом "Лидер" 4 (γрасч, υрасч, βрасч), контролируя полет на индикационном поле 3 экрана 1.
Генератор символов (ГС) 15 уменьшает или увеличивает индекс "Лидер" 4 в зависимости от разности величин Vтек - текущего значения вектора скорости ЛА и Vзад - заданного значения вектора скорости ЛА.
Разность скоростей ΔV=(Vзад-Vтек) определяет коэффициент масштаба скорости полета ЛА mV. Когда текущее значение вектора скорости ЛА Vтек меньше программно заданного вектора скорости ЛА Vзад, индекс "Лидер" 4 уменьшается в размерах - "удаляется" (фиг.15). На фигурах 15, 16, 17 важно для объяснения показать размер индекса "Лидер" 4 и не заострять внимание на других изменениях индекса "Лидер" 4, которые возникают при разности скоростей ΔV. Когда текущее значение вектора скорости ЛА Vтек больше программно заданного вектора скорости ЛА Vзад, индекс "Лидер" 4 увеличивается в размерах - "приближается" (фиг.16). Когда текущее значение вектора скорости ЛА Vтек равно программно заданному вектору скорости ЛА Vзад, индекс "Лидер" 4, имеет геометрический размер, равный геометрическому размеру индекса "Самолет" 5 (фиг.17).
Индекс "Лидер" 4 со значениями углового положения (γрасч, υрасч, βрасч) и преобразованный коэффициентом масштаба скорости полета ЛА mV перемещается по индикационному полю 3 экрана 1 в зависимости от значений коэффициента масштаба отклонения высоты полета ЛА mH и коэффициента масштаба бокового отклонения ЛА mZ. При коэффициентах масштаба отклонения mH и mZ, превышающих масштаб представления пространственных отклонений траектории полета ЛА в индикационном поле 3 экрана 1, индекс "Лидер" 4 не уходит за границу индикационного поля 3 экрана 1, а остается на границе индикационного поля 3 экрана 1 и индицируется мигающей световой индикацией. Мигающая световая индикация обеспечивается стандартными возможностями операторов языка программирования для КПИ 9.
Образная комплексность "крен-тангаж-высота-скольжение" для подвижных индексов "Лидер" 4, "Самолет" 5 и индекс "радиовысота" 6 охватывает все возможности визуального представления параметров траектории полета ЛА на индикационном поле 3 экрана 1 КПИ.
Полет ЛА с текущей скоростью больше программно заданной скорости полета, при отрицательном боковом отклонении от заданной траектории и с превышением высоты представлен на фигуре 18. Пространственное и угловое положение индекса "Лидер" 4 на индикационном поле 3 экрана 1 подсказывает летчику наискорейший выход из создавшегося положения: уменьшить текущий угол тангажа до отрицательного значения, уменьшить текущий угол крена до отрицательного значения, исправить текущий угол скольжения на положительный (правое скольжение).
При полете ЛА со скоростью близкой к программно задаваемой, без отклонения по высоте полета и без отклонения в боковом направлении летчик увидит на индикационном поле 3 экрана 1 интуитивно понятные (фиг.19) образы текущей траектории полета. Для исправления текущей траектории полета летчику (как подсказывает образная фигура индекса "Лидер" 4) потребуется уменьшить текущий угол крена до отрицательного значения.
Фрагмент полета ЛА с текущим отрицательным углом тангажа, на высоте меньшей, чем программно заданная высота траектории и на скорости полета меньшей, чем программно заданная скорость полета представлен на фигуре 20. Интуитивно понятную образную подсказку "увеличить текущий угол тангажа до положительного значения и увеличить текущую скорость полета" летчик воспримет безошибочно, что обеспечит безаварийный выход из создавшегося положения даже в экстремальных условиях полета, когда времени на принятие решения не будет.
Фрагмент траектории полета ЛА в момент посадки, когда текущая скорость полета ЛА, управляемого летчиком, равна программно задаваемой скорости полета, высота полета, угловое положение ЛА близко к программно задаваемым значениям изображен на фигуре 21. Интуитивно понятная образная подсказка напоминает летчику, что по программе полета при посадке в данный момент необходимо исполнить команду "выпустить шасси", поэтому летчик никогда не совершит посадку с аварийными последствиями без выпущенных шасси. Команды "убрать шасси" и "выпустить шасси", которые даются только при взлете и посадке, не будут отвлекать внимание летчика от основной цели полета, снимая психофизиологическую нагрузку, так как в этой фазе полета индикация шасси на индексе "Лидер" 4 и индексе "Самолет" 5 отсутствует. Предлагаемая функциональная схема командно-пилотажного индикатора (фиг.4) позволяет индексу "Лидер" 4 свободно перемещаться по горизонтали и вертикали в индикационном поле 3 экрана 1, визуализируя пространственные отклонения ЛА относительно программно заданной траектории полета; позволяет поворачиваться вокруг центра симметрии и подобно изменять свою форму с образным изображением расчетного значения угла крена, расчетного значения угла тангажа, расчетного значения угла скольжения в соответствии с коэффициентом масштаба скорости полета. Когда ЛА находится на требуемой траектории, летит с требуемым углом крена, углом тангажа, углом скольжения и с заданной скоростью, указатель "Лидер" 4 совмещается с индексом "Самолет" 5 и по положению, и по размеру.
Такая интуитивно понятная индикация упрощает пилотирование. Предлагаемая индикация КПИ, визуализируемая угловым положением подвижного управляемого летчиком индекса "Самолет" 5 вместе с индексом "радиовысоты" 6, формирует новую образную комплексность "крен-тангаж-высота-скольжение", которая легко и гарантированно безошибочно воспринимается летчиком любой квалификации в любых погодных условиях и на любой высоте при условиях ограниченного времени на принятие правильного решения для управления ЛА, что обеспечивает летчику любой квалификации его неразрывный контроль над полетом его ЛА и полное исключение пилотажных ошибок, аварийных и катастрофических последствий полета, связанных с потерей летчиком пространственной ориентации при управлении летательным аппаратом в экстремальных условиях полета.
Возможность управления полетом ЛА с предлагаемой нами индикацией подвижного индекса "Лидер" и подвижного индекса "Самолет" гарантирует летчику режим безопасного полета в самых сложных экстремальных условиях полета, так как визуализация параметров отклонения полета ЛА от программно заданной траектории в генераторе символов 15 охватывает все возможные варианты индикации подвижного индекса "Лидер" (носителя всех летных ограничений), которые обеспечивают благополучное управление полетом ЛА и выход из любой экстремальной ситуации, даже когда отсутствует время на принятие правильного решения.
В предлагаемом изобретении важно показать возможность увидеть на навигационном поле 3 экрана 1 КПИ текущий угол крена, угол тангажа и угол скольжения ЛА, управляемого летчиком, и связать эти углы с индексом "Самолет" 5. На экране КПИ летчик будет видеть реальное угловое положение своего ЛА в пространстве, определяемое текущими углами крена, угла тангажа и вычисляемым текущим углом скольжения.
Это основа безопасной индикации предлагаемого командно-пилотажного индикатора.
На этом цикл работы блок-схемы (фиг.3) завершается.
Заявляемый командно-пилотажный индикатор позволяет обеспечить:
- исключение пилотажных ошибок, аварийных и катастрофических последствий полета, связанных с потерей летчиком пространственной ориентации;
- безаварийный выход в кратчайшее время из любой самой сложной экстремальной ситуации в условиях сильной психофизиологической нагрузки, когда отсутствует время на обдумывание и принятие решения;
- повышение информационной наглядности текущих параметров полета, связанных с приборным управлением летательного аппарата в директорном полете с автоматическим режимом управления, когда летчик выполняет функцию "летчика-оператора" и в директорном полете с ручным управлением ЛА, а также когда летчик отключает директорное управление полетом и управляет ЛА в режиме ручного свободного полета по своему усмотрению;
- отличное восприятие летчиком величины и знака текущего угла крена, тангажа и угла скольжения индекса "Самолет" в кабинной системе координат (точно так же, как и в визуальном полете в земной системе);
- восприятие летчиком управляемого индекса "Самолет" как летательный аппарат ведущего, но в то же время четко представляя свое полное пространственное положение и управляет им;
- легкое и гарантированно безошибочное восприятие образной комплексности ("крен-тангаж-высота-скольжение") летчиком любой квалификации в любых погодных условиях и на любой высоте, т.к. не отвлекает его внимание при пилотировании ЛА на линию искусственного авиагоризонта, указатель курса ЛА, градуировку угла тангажа, градуировку угла а, раскрашенную картинку авиагоризонта «земля-небо» (для оценки количественного значения перечисленных параметров требуют последовательного считывания информации с соответствующих шкал, что приводит к увеличению времени оценки пространственного положения ЛА по приборам и уменьшению времени для оценки пространственного положения ЛА и принятия правильных управляющих действий), что в целом приводит к повышению безопасности полетов.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР ВЕРТОЛЕТА | 2020 |
|
RU2778716C2 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР ВЕРТОЛЕТА | 2013 |
|
RU2539708C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2018 |
|
RU2711196C1 |
| Командно-пилотажный индикатор вертолета | 2021 |
|
RU2778955C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2019 |
|
RU2716886C1 |
| СИСТЕМА ИНДИКАЦИИ ВЗЛЕТА И ПОСАДКИ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2016 |
|
RU2647344C2 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2002 |
|
RU2207514C1 |
| Способ интегрального отображения параметров полётной ситуации | 2019 |
|
RU2722888C1 |
| СПОСОБ ФОРМИРОВАНИЯ ПИЛОТАЖНО-НАВИГАЦИОННОЙ ИНФОРМАЦИИ НА МНОГОФУНКЦИОНАЛЬНОМ ИНДИКАТОРЕ ДЛЯ ВЫПОЛНЕНИЯ ПОСАДКИ | 2005 |
|
RU2297596C1 |
| СПОСОБ УПРАВЛЕНИЯ САМОЛЕТОМ ПРИ ЗАХОДЕ НА ПОСАДКУ | 2004 |
|
RU2267747C1 |









Изобретение относится к устройствам отображения информации, используемой пилотом и членами экипажа при пилотировании летательными аппаратами (ЛА), а именно к командно-пилотажным индикаторам (КПИ) с визуализацией индексов "Лидер" и "Самолет". Техническим результатом является исключение пилотажных ошибок, аварийных и катастрофических последствий полета, связанных с потерей летчиком пространственной ориентации за счет создания на индикационном поле экрана командно-пилотажного индикатора одновременной единой образной комплексности текущей информации для летчика "крен-тангаж-высота-скольжение". Командно-пилотажный индикатор дополнительно снабжен блоками, на входы которых поступают сигналы из систем ЛА: блоком вычисления параметров текущего угла скольжения, блоком вычисления значения расчетного угла крена, блоком вычисления расчетного угла скольжения, блоком расчета отклонения ЛА по высоте полета и коэффициента масштаба отклонения высоты полета ЛА, блоком вычисления значения расчетного угла тангажа, блоком расчета бокового отклонения и коэффициента масштаба бокового отклонения ЛА, при этом выходы соединены с входами генератора символов. 3 з.п. ф-лы, 21 ил.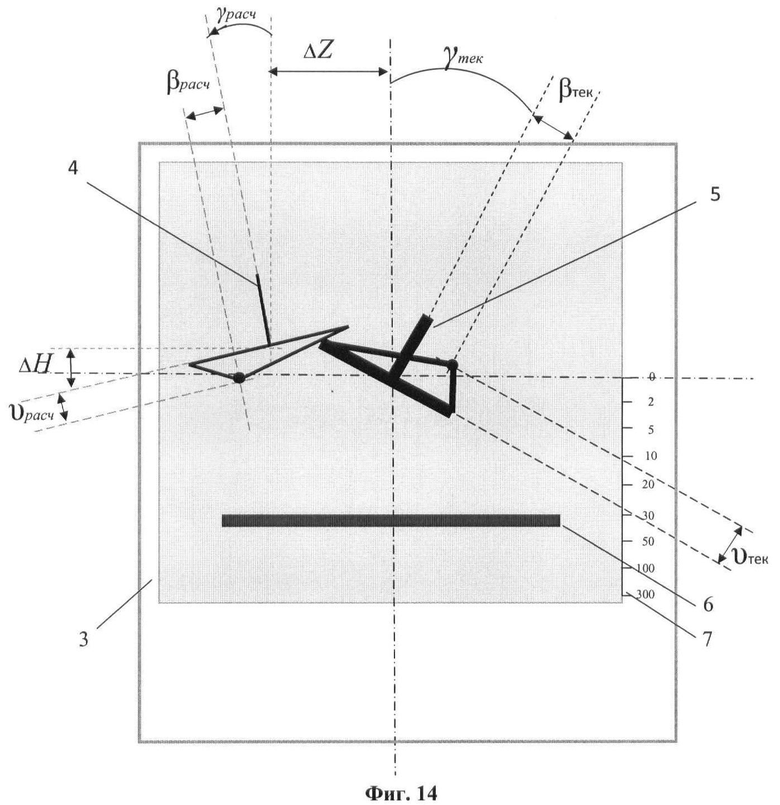
1. Командно-пилотажный индикатор, содержащий экран, на котором индицируются неподвижный относительно центра индикационного поля экрана отсчетный индекс в виде стилизованного изображения самолета при виде сзади с выпущенными шасси ("Самолет"), обозначающий текущее положение ЛА в пространстве, индицируемый на экране подвижный индекс в виде стилизованного изображения самолета при виде сзади с выпущенными шасси, обозначающий требуемое положение ЛА в пространстве ("Лидер"), имеющий возможность поворота вокруг своего центра симметрии, а также перемещения по вертикали и горизонтали относительно индекса "Самолет", генератор символов, соединенный с экраном, средства управления подвижным индексом "Лидер", выполненные в виде блоков вычисления характеристик "Лидера", на входы которых поступают сигналы из систем ЛА, а с выходов которых на генератор символов поступают сигналы в соответствии с величиной ошибки управления по высоте, обеспечивающее перемещение индекса "Лидер" по индикационному полю в вертикальном направлении, по углу тангажа и поворотом его вокруг центра симметрии в соответствии с величиной ошибки по углу крена, увеличением или уменьшением линейных размеров индекса "Лидер" при увеличении или уменьшении соответственно заданной скорости полета таким образом, что при нулевых значениях ошибок по всем контролируемым параметрам индекс "Лидер" совмещается с индексом "Самолет", отличающийся тем, что индекс "Самолет" выполнен с возможностью поворота вокруг своего центра симметрии, а стилизованное изображение индексов "Самолет" и "Лидер" выполнено в виде одной горизонтальной прямой, символизирующей крылья ЛА, и одной вертикальной прямой, символизирующей киль ЛА и пересекающей горизонтальную прямую в ее центре под прямым углом, и дополнительно снабжен блоком вычисления параметров текущего угла скольжения, блоком вычисления значения расчетного угла крена, блоком вычисления расчетного угла скольжения, блоком расчета отклонения ЛА по высоте полета и коэффициента масштаба отклонения высоты полета ЛА, блоком вычисления значения расчетного угла тангажа, блоком расчета бокового отклонения и коэффициента масштаба бокового отклонения ЛА, на входы которых поступают сигналы из систем ЛА, а выходы которых соединены с входами генератора символов, а также выполнен с возможностью индикации индекса "радиовысота" и неподвижной неравномерной шкалы значения высоты полета, индицируемой на вертикальной стороне границы индикационного поля экрана с нулевым значением высоты, расположенным на уровне горизонтальной линии, проходящей через центр индикационного поля экрана, при этом оба индекса "Самолет" и "Лидер" выполнены с возможностью одновременного отображения текущего угла скольжения и угла тангажа индекса "Самолет" и отклонение от заданного угла скольжения и угла тангажа индекса "Лидер" путем индикации треугольника, основание которого равно длине горизонтальной прямой линии, символизирующей крылья ЛА, а положение вершины треугольника соответствует текущему значению угла тангажа и угла скольжения индекса "Самолет" и отклонению от заданного значения угла тангажа и угла скольжения индекса "Лидер".
2. Командно-пилотажный индикатор по п.1, отличающийся тем, что горизонтальные и вертикальные линии, образующие изображения индексов "Лидер" и "Самолет", выполнены с различной толщиной и яркостью.
3. Командно-пилотажный индикатор по п.2, отличающийся тем, что при отклонении от заданных параметров бокового отклонения и высоте, превышающей величину максимально возможную для индикации, индекс "Лидер" остается на границе индикационного поля экрана и путем периодического изменения яркости (мигания) предупреждает о превышении параметров бокового отклонения и высоте.
4. Командно-пилотажный индикатор по п.3, отличающийся тем, что индексы "Лидер" и "Самолет" выполнены с возможностью индикации выполнения команды "убрать шасси" в момент, когда высота полета ЛА выше высоты программно заданного полета без шасси на взлете и выполнения команды "выпустить шасси" путем индикации под горизонтальными линиями, символизирующими крылья, индексов "Лидер" и "Самолет" шасси в виде двух линий в момент, когда высота полета ЛА меньше высоты программно заданного полета без шасси при посадке.
| Способ получения закиси азота и аппарат для осуществления способа | 1955 |
|
SU103215A1 |
| ИНТЕГРИРОВАННАЯ СИСТЕМА ВИХРЕВОЙ БЕЗОПАСНОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА | 2003 |
|
RU2324953C2 |
| WO 9630722 A1, 03.10.1996. | |||

