Предлагаемое изобретение относится к автоматике, в частности к устройствам для контроля и регулирования технологических параметров, и может быть использовано в качестве позиционера для исполнительных механизмов, оснащенных датчиками положения, в системах автоматического управления технологическими процессами, а также в качестве регулятора в системах управления с малым временем запаздывания.
Известно устройство для контроля и регулирования технологических параметров [1], содержащее трехпозиционное реле, индикаторы выхода за верхний и нижний пределы допустимых отклонений, датчик параметра, задатчик уставки, первый и второй задатчики зоны нечувствительности трехпозиционного реле, аналоговый переключатель, два индикатора, формирователь сигналов, выпрямитель, усилители, логические схемы и исполнительный механизм. Недостатком устройства [1] являются его сложность, низкие точность и быстродействие,
Известно устройство [2], содержащее трехпозиционное реле, индикаторы выхода за верхний и нижний пределы допустимых отклонений, датчик параметра, задатчики уставки, первый и второй задатчики зоны нечувствительности трехпозиционного реле, аналоговый переключатель, два формирователя сигналов, первый и второй усилители, логические схемы и исполнительный механизм. Недостатком устройства [2] являются его сложность, низкие точность и быстродействие.
Наиболее близким по технической сущности и достигаемому эффекту - прототипом предлагаемого устройства является устройство [1].
Задачей предлагаемого изобретения является повышение точности и скорости позиционирования исполнительного механизма и упрощение устройства для позиционирования.
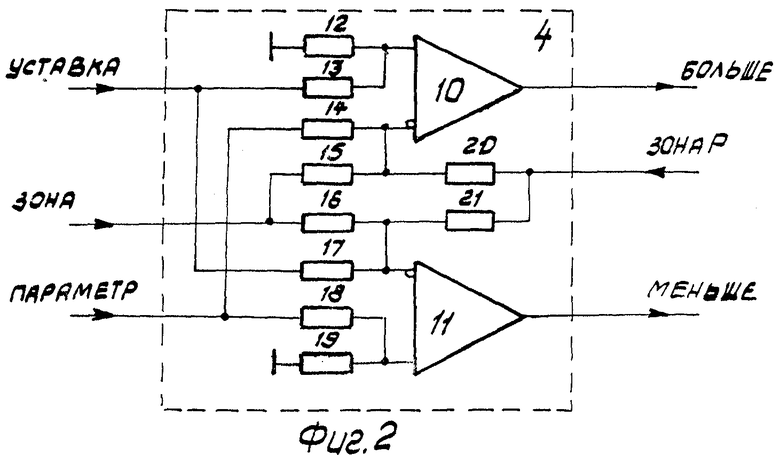
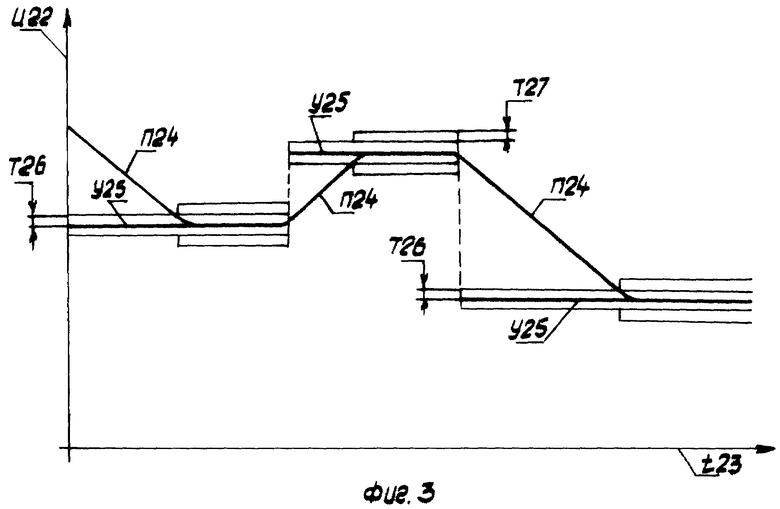
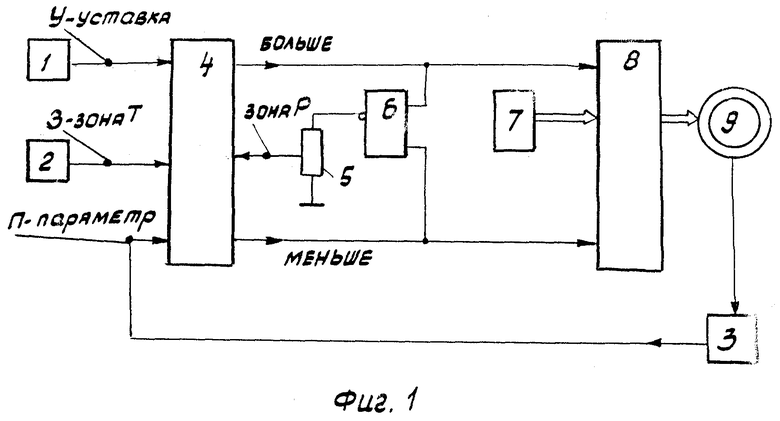
На фиг.1 изображена блок-схема устройства, реализующего предложенный способ позиционирования исполнительного механизма, на фиг.2 - пример реализации трехпозиционного реле, на фиг.3 - графическое изображение, поясняющее способ позиционирования исполнительного механизма.
На представленных Фигурах изображены:
1 - задатчик Уставки - У,
2 - задатчик постоянной части зоны нечувствительности - Зона Т,
3 - датчик Параметра - П,
4 - трехпозиционное реле,
5 - задатчик переменной части зоны нечувствительности - Зона Р,
6 - логический элемент 2ИЛИ-НЕ,
7 - источник питания,
8 - реверсивный контактор [3],
9 - исполнительный механизм,
10, 11 - компараторы,
12-21 - резисторы,
U22 - координата аналогового напряжения,
t23 - координата времени,
П24 - сигнал Параметра,
У25 - сигнал Уставки,
Зона Т 26 - постоянная часть зоны нечувствительности,
Зона Т 27 - переменная часть зоны нечувствительности.
Сущность предлагаемого способа позиционирования исполнительного механизма заключается в том, что зону нечувствительности трехпозиционного реле разделяют на переменную и постоянную части. При этом экспериментально определяют величину изменения параметра за время разгона исполнительного механизма Зона Р, которую устанавливают как переменную часть зоны нечувствительности трехпозиционного реле и за время торможения исполнительного механизма Зона Т, которую устанавливают как постоянную зону нечувствительности трехлозиционного реле. Переменная часть зоны нечувствительности принимает два значения - 0 или Зона Р в зависимости от сигнала, поступающего на вход задатчика переменной зоны. Для установки исполнительного механизма в заданное положение на входы трехпозиционного реле подключают сигналы Параметра, Уставки, сигналы постоянной и переменной частей зоны нечувствительности, а выходы Больше и Меньше подключают к одноименным входам реверсивного контактора [3], а положение исполнительного механизма задают сигналом задатчика Уставки путем изменения его на величину, превосходящую сумму модулей сигналов постоянной и переменной частей зоны нечувствительности, и при этом сигнал переменной части зоны нечувствительности уменьшают до нуля, а при достижении разности сигнала Параметра и Уставки, равной или меньше по модулю постоянной части зоны нечувствительности трехпозиционного реле, переменную часть зоны нечувстительности увеличивают до величины сигнала Зона Р.
Время разгона исполнительного механизма считается от момента включения исполнительного механизма до достижения им номинальной скорости, а время торможения - от момента выключения исполнительного механизма до его полной остановки.
Предлагается также устройство, реализующее предложенный способ позиционирования исполнительного механизма, новизна которого заключается в том, что в устройство введен задатчик переменной части зоны нечувствительности трехпозиционного реле, логический элемент 2ИЛИ-НЕ и новые связи между его элементами, обеспечивающие автоматическое выключение переменной части зоны нечувствительности при превышении разности Уставки и Параметра величины суммы моделей постоянной и переменной частей зоны нечувстительности и увеличение переменной зоны нечувствительности на величину сигнала Зона Р при разности Уставки и Параметра, равной или меньше модуля постоянной части зоны нечувствительности.
Устройство, реализующее предлагаемый способ, работает следующим образом. При значении сигналов П-У>Зона Т+Зона Р, на выходе Меньше трехпозиционного реле 4 появляется высокий потенциал, подключающий посредством реверсивного контактора 8 источник питания 7 к исполнительному механизму 9, который, будучи связанным с датчиком Параметра 3, уменьшает значение его сигнала П, а сигнал на выходе логического элемента 6 изменяется с высокого потенциала на низкий и выходной сигнал задатчика 5 Зона Р становится равным нулю. При достижении Параметром условия П=У+Зона Т сигнал с выхода Меньше становится низким и источник питания 7 отключается реверсивным контактором 8 от исполнительного механизма 9, но Параметр продолжает уменьшаться под действием связи исполнительного механизма с датчиком Параметра 3 на величину ЗонаТ и при остановке исполнительного механизма сигнал Параметра становится равным сигналу Уставки, а на выходе логического элемента 2ИЛИ-НЕ одновременно с выключением исполнительного механизма появляется высокий потенциал, который поступает на вход задатчика 5, и с его выхода поступает сигнал Зона Р, который увеличивает зону нечувствительности трехпозиционного реле на эту величину как для положительных, так и отрицательных рассогласований между Параметром и Уставкой.
Для отрицательных рассогласований между сигналом Параметра и Уставки, т.е. когда выполняется условие У-П>Зона Т+Зона Р сигнал, Зона Р, задаваемый выходным сигналом логической схемы 6, уменьшается до нуля и на выходе Больше появляется высокий потенциал, который подключает источник питания 7 посредством реверсивного контактора 8 к исполнительному механизму 9, и сигнал параметра увеличивается до тех пор, пока не выполнится условие У-П=Зона Т, при котором высокий потенциал с выхода Больше трехпозиционного реле переходит в сигнал низкого уровня и исполнительный механизм 9 посредством реверсивного контактора 8 отключается от источника 7, но сигнал П Параметра продолжает увеличиваться на величину Зона Т и становится равным сигналу Уставки, при этом с выхода логической схемы 6 поступает высокий потенциал на вход питания задатчика 5 и величина зоны нечувствительности трехпозиционного реле увеличивается на величину сигнала Зона Р на выходе задатчика 5, подключенного к соответствующим элементам трехпозиционного реле.
Трехпозиционное реле на фиг.2 содержит компараторы 10 и 11, на суммирующие, инвертирующие и неинвертирующие входы которых подключены суммирующие резисторы 12-21. Первые контакты резисторов 12 и 19 подключены к общему потенциалу трехпозиционного реле, а вторые контакты - к неинвертирующим входам компараторов 10 и 11 соответственно, первые контакты резисторов 13 и 17 объединены и подключены к задатчику сигнала Уставка, а вторые их контакты подключены соответственно к неинвертирующему входу компаратора 10 и инвертирующему входу компаратора 11, резисторы 14 и 18 объединены первыми входами и подключены к сигналу Параметра, а их вторые входы подключены к инвертирующему входу компаратора 10 и неинвертирующему входу компаратора 11 соответственно, резисторы 15 и 16 объединены первыми входами и подключены к сигналу Зона Т, а вторые входы резисторов 15 и 16 подключены к инвертирующим входам компараторов 10 и 11 соответственно, а дополнительно введенные в устройство резисторы 20 и 21 объединены первыми входами и подключены к сигналу Зона Р и вторые их выходы подключены к инвертирующим входам компараторов 10 и 11 соответственно аналогично суммирующим резисторам 15 и 16.
Трехпозиционное реле на фиг.2 обеспечивает сравнение сигналов Параметра и Уставка, а ширина зоны нечувствительности задается сигналами датчиков Зона Т и Зона Р и равна сумме этих сигналов для положительного и отрицательного сигналов рассогласования Параметра и Уставки и обеспечивает выполнение следующих функций:
- Формирование логического сигнала высокого уровня на выходе Меньше при условии П>У+Зона Т+Зона Р.
- Формирование логического сигнала низкого уровня на выходе Меньше при условии П<У+Зона Т+Зона Р.
- Формирование логического сигнала высокого уровня на выходе Больше при условии У>П+Зона Р+Зона Т.
- Формирование логического сигнала низкого уровня на выходе Больше при условии У<П+Зона Р+Зона Т.
На фиг.3 представлено изменение позиции исполнительного механизма, однозначно соответствующего изменению сигнала Параметра 24, при изменении сигнала Уставки 25, к которому аппаратным способом в трехпозиционном реле привязаны сигналы задатчиков Зона Т 26 и Зона Р 27.
Таким образом, предложенный способ позиционирования исполнительного механизма и устройство для его реализации обеспечивают максимальную точность позиционирования исполнительного механизма, соответствующее сигналу Уставки, максимальную скорость выполнения позиционирования и несомненное упрощение устройства по сравнению с прототипом. Предложенное устройство является новым, полезным, промышленно применимым и соответствует критериям изобретения.
Литература.
1. Патент РФ 1742789, G 05 B 23/02, БИ №23, 23.06.92.
2. Патент РФ 20286541, G 05 B 23/02, БИ №4, 09.02.95.
3. Информационные материалы фирмы Danfoss, Reversing contactor, type RCI.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И РЕГУЛИРОВАНИЯ ТЕХНОЛОГИЧЕСКОГО ПАРАМЕТРА | 1992 |
|
RU2028654C1 |
| Устройство управления процессом формования пленочных материалов | 1989 |
|
SU1671742A1 |
| Регулятор нагрузки горной машины | 1983 |
|
SU1167325A1 |
| Устройство управления регулятором напряжения трансформатора | 1989 |
|
SU1658332A1 |
| АДАПТИВНЫЙ ТРЕХПОЗИЦИОННЫЙ РЕГУЛЯТОР | 2010 |
|
RU2408913C1 |
| Устройство для автоматической компенсации емкостных токов в электрической сети | 1983 |
|
SU1113867A1 |
| ДВУХКАНАЛЬНЫЙ РЕЛЕЙНЫЙ РЕГУЛЯТОР | 1969 |
|
SU253212A1 |
| Многоканальное устройство для оперативного управления | 1989 |
|
SU1735807A1 |
| Система автоматического регулирования загрузки дробилки в.и.янтурина | 1984 |
|
SU1205936A1 |
| Следящая система | 1981 |
|
SU962847A1 |
Изобретение относится к автоматизации технологических процессов и может быть использовано для позиционирования исполнительного механизма, оснащенного датчиком положения, а также в качестве регулятора для объекта с малым запаздыванием. Технический результат - высокие точность и скорость позиционирования исполнительного механизма, а также простое устройство для его реализации. Для достижения результата экспериментально определяют изменение параметра за время разгона исполнительного механизма и эту величину устанавливают как переменную часть зоны нечувствительности, а также изменение параметра за время торможения исполнительного механизма и эту величину устанавливают как постоянную часть зоны нечувствительности трехпозиционного реле, причем переменную часть зоны нечувствительности включают при выполнении условия, что разность между значениями пераметра и уставки больше суммы модулей переменной и постоянной частей зоны нечувствительности и переменную часть зоны нечувствительности уменьшают до нуля, когда разность между параметром и уставкой равна или меньше модуля величины постояннойчасти зоны нечувствительности трехпозиционного реле. Устройство, которое может быть использовано для реализации способа позиционирования, характеризуется тем, что в него введен задатчик переменной зоны и логический элемент 2ИЛИ-НЕ, входы которого подключены к выходам Больше и Меньше трехпозиционного реле, а выход - к входу задатчика переменной части зоны нечувствительности трехпозиционного реле. 3 ил.
Способ позиционирования исполнительного механизма посредством трехпозиционного реле с зоной нечувствительности, входами подключенного к задатчику уставки, датчику параметра, задатчику зоны нечувствительности, а выходами “Больше” и “Меньше” - к одноименным управляющим входам реверсивного контактора, к входу которого подключен источник питания, а к выходу исполнительный механизм, заключающийся в том, что экспериментально определяют изменение величины сигнала параметра за время разгона и за время торможения исполнительного механизма, зону нечувствительности трехпозиционного реле разделяют на переменную и постоянную части, которые устанавливают как изменение величины сигнала параметра соответственно за время разгона и за время торможения исполнительного механизма, а позиционирование исполнительного механизма осуществляют путем изменения сигнала уставки на необходимую величину при одновременном уменьшении переменной части зоны нечувствительности до нуля, а при достижении разностью сигнала параметра и сигнала уставки модуля величины постоянной части зоны нечувствительности исполнительный механизм отключают и одновременно увеличивают зону нечувствительности на величину ее переменной части.
| Устройство для контроля и регулирования технологических параметров | 1990 |
|
SU1742789A1 |
| УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И РЕГУЛИРОВАНИЯ ТЕХНОЛОГИЧЕСКОГО ПАРАМЕТРА | 1992 |
|
RU2028654C1 |
| US 4500951 А, 19.02.1985 | |||
| Устройство для управления позиционированием | 1988 |
|
SU1603346A1 |
| Измерительная система с автоматическим контролем аналого-цифрового преобразования и блок задания нечувствительности | 1991 |
|
SU1837261A1 |

