Изобретение относится к области управления и навигации и может быть использовано на летательных аппаратах различного типа и назначения: самолетах, вертолетах, экранолетах и дирижаблях, а также на водных и наземных транспортных средствах.
Известен навигационный комплекс летательного аппарата, содержащий инерциальную и спутниковую навигационные системы, навигационный вычислитель, регистратор навигационной информации, вычислитель погрешностей навигационной системы, энергонезависимое запоминающее устройство, вычислитель поправок к составляющим скорости и азимутальному углу гироплатформы инерциальной навигационной системы и выход навигационной информации (Патент РФ №2170410, G 01 С 23/00, 2001 г.).
Недостаток аналога - комплекс предназначен для решения только навигационных задач и не интегрирован с другими системами летательного аппарата.
Известен навигационный комплекс летательного аппарата, принятый в качестве ближайшего аналога, содержащий инерциальную и спутниковую навигационную системы, вычислительную систему, систему ввода данных и команд управления, соединенную с вычислительной системой, многофункциональную систему индикации и сигнализации, датчики системы воздушных параметров и коммутационные устройства (Патент РФ №2170409, G 01 С 23/00, 2001 г.). Комплекс решает в основном задачи навигации и индикации и обеспечивает потребности других систем летательного аппарата в навигационной информации.
Недостатки ближайшего аналога: низкая степень интеграции комплекса с другими системами летательного аппарата и недостаточное обеспечение уровня: безопасности полетов.
Техническим результатом, на который направлено изобретение, является повышение степени интеграции комплекса с бортовыми системами и уровня безопасности полетов летательного аппарата.
Этот результат достигается тем, что интегрированный пилотажно-навигационный комплекс летательного аппарата содержит инерциальную и спутниковую навигационную системы, вычислительную систему, систему ввода данных и команд управления, соединенную с вычислительной системой, многофункциональную систему индикации и сигнализации, датчики системы воздушных параметров и коммутационные устройства, спутниковая навигационная система выполнена в виде системы автоматического зависимого наблюдения вещательного режима АЗН-В для обеспечения систем навигации, управления полетом и вектором тяги силовой установки, индикации и сигнализации информацией о параметрах движения и координатах своего и других летательных аппаратов, вычислительная система имеет возможность решения как навигационных задач, так и задач управления полетом и вектором тяги силовой установки, контроля и оценки состояния бортовых систем и агрегатов летательного аппарата, включает концентратор сети информационного обмена, компьютер шины обмена данными и соединенную с ним саму шину обмена для двухсторонней передачи информации в системах управления, индикации и сигнализации, адаптеры шины обмена данными и интерфейсные модули системы зависимого наблюдения АЗН-В, инерциальной системы навигации и датчиков воздушных параметров, приводы и датчики системы управления полетом и системы управления вектором тяги силовой установки и датчики бортовых систем, при этом концентратор сети информационного обмена соединен двухсторонними связями с вычислительной системой, с компьютером управления шиной обмена данными, с многофункциональной системой индикации и сигнализации, через интерфейсные модули с системой автоматического зависимого наблюдения АЗН-В, с ннерциальной системой навигации и с датчиками системы воздушных параметров, а шина обмена данными через адаптеры соединена с приводами и датчиками системы управления полетом и системы управления вектором тяги силовой установки, а также с датчиками бортовых систем.
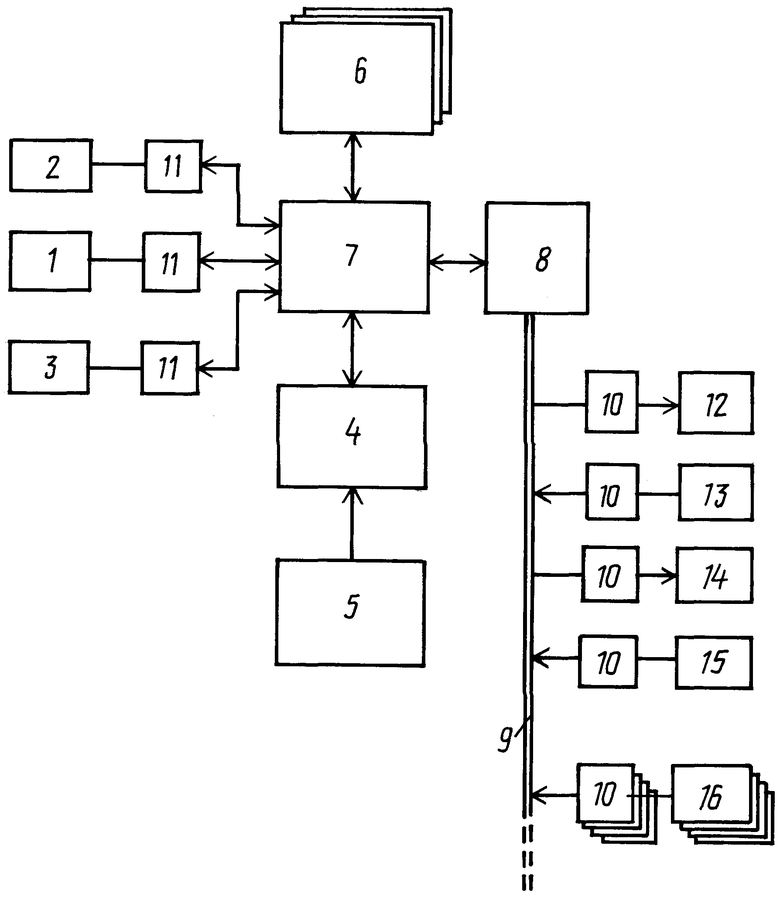
Структурная схема интегрированного пилотажно-навигационного комплекса летательного аппарата показана на чертеже.
Интегрированный пилотажно-навигационный комплекс содержит инерциальную систему навигации 1 и спутниковую навигационную систему автоматического зависимого наблюдения вещательного режима АЗН-В 2, датчики системы воздушных параметров 3, вычислительную систему 4, систему ввода данных и команд управления 5, соединенную с вычислительной системой, многофункциональную систему индикации и сигнализации 6, концентратор сети информационного обмена 7, компьютер управления шиной обмена данных 8 и соединенную с ним саму шину обмена 9 для двухсторонней передачи информации в системах управления, индикации и сигнализации, адаптеры шины обмена данными 10, интерфейсные модули 11 системы автоматического зависимого наблюдения АЗН-В 2, инерциальной системы навигации 1 и датчиков системы воздушных параметров 3, приводы 12 и датчики 13 системы управления полетом, приводы 14 и датчики 15 системы управления вектором тяги силовой установки и датчики 16 бортовых систем (воздушно-газовой, электроснабжения и др.). При этом концентратор сети информационного обмена 7 двухсторонними связями соединен с вычислительной системой 4, с многофункциональной системой индикации и сигнализации 6, с компьютером управления шиной обмена данными 8 и через интерфейсные модули 11 с системой автоматического зависимого наблюдения АЗН-В 2, с инерциальной системой навигации 1 и с датчиками системы воздушных параметров 3. Шина обмена данными 9 через адаптеры 10 соединена с приводами 12 и датчиками 13 системы управления полетом, приводами 14 и датчиками 15 системы управления вектором тяги силовой установки, а также с датчиками 16 бортовых систем.
Как следует из приведенного выше описания, интегрированный пилотажно-навигационный комплекс летательного аппарата выполнен на основе единых аппаратных и программно-вычислительных средств, обеспечивающих навигацию, управление полетом летательного аппарата и управление вектором тяги силовой установки, а также осуществление контроля и оценки состояния его систем и агрегатов.
Спутниковая навигационная система автоматического зависимого наблюдения вещательного режима АЗН-В 2 комплекса в отличие от ближайшего аналога обеспечивает не только определение собственных параметров движения и координат летательного аппарата, но и передачу этих параметров и координат другим летательным аппаратам и прием от них аналогичных параметров и координат. Параметры и координаты своего и других летательных аппаратов системы АЗН-В используются в системах навигации, управления полетом и вектором тяги силовой установки, индикации и сигнализации. Представление на борту параметров и координат других летательных аппаратов позволяет пилотам в течение всего полета видеть и оценивать воздушную обстановку, тем самым существенно повысить безопасность полетов летательного аппарата.
Вычислительная система 4 вместе с инерциальной системой навигации 1, спутниковой навигационной системой автоматического зависимого наблюдения АЗН-В 2, датчиками системы воздушных параметров 3, системой ввода данных и команд управления 5, многофункциональной системой индикации и сигнализации 6, концентратором сети информационного обмена 7 и компьютером управления шиной обмена данными 8 является ядром (неизменной частью) комплекса. Оно пригодно для использования на различных типах летательных аппаратов и других транспортных средствах, что существенно расширяет область применения комплекса.
Изменяемой частью комплекса, характерной для конкретного летательного аппарата, является набор приводов (12, 14) и датчиков (13, 15, 16) бортовых систем, присоединенных к шине обмена данных 9.
Вычислительная система комплекса в отличие от ближайшего аналога интегрирована. Она сосредотачивает и обрабатывает не только информацию о пилотажно-навигационных параметрах полета, но и о состоянии всех важнейших агрегатов и систем летательного аппарата. Вычислительная система решает как традиционные навигационные задачи и задачи отображения информации, необходимой для пилотирования и навигации, так и задачи управления полетом летательного аппарата, управления вектором тяги силовой установки, а также задачи контроля и оценки состояния бортовых систем и агрегатов летательного аппарата.
Упомянутый выше контроль вычислительная система осуществляет, получая информацию о состоянии контролируемых объектов через интерфейсные модули 11, концентратор 7, компьютер управления 8 и шину обмена данными 9 с двухсторонней передачей информации, связанной через адаптеры 10 с датчиками 13, 15 и 16, указанных выше систем. Система контроля может быть легко трансформирована для конкретного типа летательного аппарата путем присоединения к шине 9 комплекта систем и агрегатов, присущих данному аппарату. Результаты текущего контроля систем и агрегатов летательного аппарата дают возможность автоматике и пилотам оценивать их реальное состояние и принимать решения по их использованию и продолжению полета.
Вычислительная система 4 является полнофункциональной, она решает весь комплекс задач, необходимых для выполнения полета летательного аппарата от взлета до посадки. Это значительно облегчает решение проблемы повышения функциональной надежности комплекса путем резервирования его центрального узла - вычислительной системы.
Через интерфейсные блоки 11 и концентратор сети 7 информация от навигационных систем (АЗН-В, ИНС, СВП) и информация об оценке состояния этих систем поступает на обработку в вычислительную систему 4. После обработки навигационной информации через концентратор обратно в систему автоматического зависимого наблюдения АЗН-В 2 для передачи другим летательным аппаратам поступают данные о параметрах движения и координатах своего летательного аппарата.
Сигналы от датчиков состояния различных бортовых систем и агрегатов (датчики системы управления полетом 13 и системы управления вектором тяги силовой установки 15 и датчики бортовых систем 16) поступают в вычислительную систему 4 через адаптеры 10, шину обмена данными 9, компьютер управления шиной 8 и концентратор сети информационного обмена 7. На основе этих данных вычислительная система вырабатывает сигналы управления, которые через адаптеры поступают на соответствующие приводы (системы управления полетом 12 и системы управления вектором тяги силовой установки 14).
Система ввода данных и команд управления 5 позволяет вводить в память вычислительной системы программу полета, карты местности по маршруту полета, информацию о погоде, вводить изменения программы и режимов полета и другую информацию.
От вычислительной системы 4 через концентратор 7 проходят данные и команды управления в систему индикации и сигнализации 6 для отображения этой информации на многофункциональных индикаторах.
Многофункциональная система индикации 6 служит для отображения всей разнообразной информации, необходимой пилотам для выполнения полета от взлета до посадки. Она содержит несколько многофункциональных цветных индикаторов на жидких кристаллах и необходимый набор сигнализаторов.
Концентрация сети информационного обмена 7 обеспечивает двухстороннюю связь навигационных систем (АЗН-В, ИНС, СВП), многофункциональной системы индикации и сигнализации 6 и системы контроля и оценки состояния бортовых систем и агрегатов с вычислительной системой 4.
Управление полетом летательного аппарата с помощью интегрированного пилотажно-навигационного комплекса осуществляется следующим образом.
Пилотажно-навигационный комплекс обеспечивает полет летательного аппарата от его взлета до посадки. При этом комплекс может обеспечивать управление полетом летательного аппарата в трех режимах: ручном, автоматическом и совмещенном.
В ручном режиме на основе навигационной информации управление полетом летательного аппарата осуществляют пилоты путем воздействуя непосредственно на органы управления, расположенные на рабочем месте пилотов и связанные с приводами 12 системы управления полетом и приводами 14 системы управления вектором тяги силовой установки.
В автоматическом режиме полет летательного аппарата происходит по заданной программе, заложенной в память вычислительной системы 4 через систему ввода данных и команд управления 5. Комплекс в процессе полета с помощью навигационной систем 1, 2 определяет действительное значение параметров движения и координат летательного аппарата, вычислительная система 4 сравнивает эти параметры и координаты с программными значениями, определяет разности действительных и программных значений указанных параметров и координат, по которым вычисляет команды управления, поступающие на приводы 12 системы управления полетом и приводы 14 системы управления вектором тяги силовой установки. В результате указанного воздействия летательный аппарат автоматически движется по заданной программе.
Совмещенный режим полета является комбинацией двух выше описанных режимов - ручного и автоматического, при котором на автоматический режим переводится поддержание лишь части заданных параметров движения и координат летательного аппарата, тогда как поддержание остальной части параметров и координат осуществляется пилотами при ручном управлении.
На всех режимах изменения программы полета вносятся через систему ввода данных и команд управления 5, отображение различной информации производится с помощью многофункциональной системы индикации и сигнализации 6, а контроль и оценка состояния систем и агрегатов летательного аппарата осуществляется через систему информационного обмена (7, 8, 9, 10, 13, 15, 16).
Использование в комплексе спутниковой навигационной системы автоматического зависимого наблюдения АЗН-В, обеспечивающей отображение воздушной обстановки на экранах многофункциональной системы индикации и сигнализации по трассе полета, существенно увеличивает безопасность полета летательного аппарата.
Реализация комплекса на основе единых программно-аппаратных средств обеспечивает по сравнению с прототипом увеличение степени интеграции аппаратуры, что приводит к существенному снижению массы и габаритов, уменьшению его энергопотребления и стоимости.
Интегрированный пилотажно-навигационный комплекс согласно изобретению из-за своей уникальности может найти широкое применение в летательных аппаратах различного типа, так как его основная часть (ядро) без каких-либо изменений может устанавливаться на любой летательный аппарат, а с помощью изменяемой части легко адаптироваться к конкретному типу летательного аппарата. По этим причинам комплекс может быть выполнен в более короткие сроки и с меньшими затратами.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2280589C2 |
| СПОСОБ УПРАВЛЕНИЯ ТРАЕКТОРИЕЙ ДВИЖЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2305859C1 |
| КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ ВЕРТОЛЕТА НА ОСНОВЕ ИНТЕГРИРОВАННОЙ МОДУЛЬНОЙ АВИОНИКИ | 2015 |
|
RU2605222C1 |
| ЛЕТНО-МОДЕЛИРУЮЩИЙ ПИЛОТАЖНЫЙ КОМПЛЕКС | 2006 |
|
RU2310909C1 |
| КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ ВЕРТОЛЕТА | 2012 |
|
RU2520174C2 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ РАЗНОРОДНОЙ АРХИТЕКТУРЫ | 2015 |
|
RU2592193C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ РЕЗЕРВНОГО ВОЗВРАТА ОДНОМЕСТНОГО БОЕВОГО ЛЕТАТЕЛЬНОГО АППАРАТА ПРИ ОТКАЗЕ ЦЕНТРАЛЬНОГО ВЫЧИСЛИТЕЛЯ | 2023 |
|
RU2807539C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ МНОГОФУНКЦИОНАЛЬНОГО САМОЛЕТА | 2011 |
|
RU2488775C1 |
| ИНФОРМАЦИОННО-УПРАВЛЯЮЩАЯ СИСТЕМА ЛЕТАТЕЛЬНОГО АППАРАТА | 2008 |
|
RU2392586C1 |
| ИНТЕГРИРОВАННЫЙ КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ ЛЕГКОГО УЧЕБНО-БОЕВОГО САМОЛЕТА | 2002 |
|
RU2203200C1 |
Изобретение относится к области управления и навигации и может быть использовано на летательных аппаратах различного типа и назначения: самолетах, вертолетах, экранолетах и дирижаблях, а также на водных и наземных транспортных средствах. Интегрированный пилотажно-навигационный комплекс содержит инерциальную навигационную систему 1 и спутниковую навигационную систему автоматического зависимого наблюдения АЗН-В 2, датчики системы воздушных параметров 3, вычислительную систему 4, систему ввода данных и команд управления 5, соединенную с вычислительной системой, многофункциональную систему индикации и сигнализации 6, концентратор 7, компьютер 8, шину обмена данными 9, адаптеры 10, интерфейсные модули 11, приводы 12 и датчики 13 системы управления полетом, приводы 14 и датчики 15 системы управления вектором тяги силовой установки и датчики 16 бортовых систем. Пилотажно-навигационный комплекс выполнен на основе единых аппаратных и программно-вычислительных средств, обеспечивающих навигацию, управление полетом и вектором тяги силовой установки, а также осуществление контроля и оценки состояния бортовых систем и агрегатов летательного аппарата в процессе эксплуатации. Технический результат - повышение степени интеграции комплекса с бортовыми системами и уровня безопасности полетов летательного аппарата. За счет интеграции с другими бортовыми системами комплекс имеет меньшую массу и габариты, малое энергопотребление и меньшую стоимость. 1 ил.
Интегрированный пилотажно-навигационный комплекс летательного аппарата, содержащий инерциальную и спутниковую навигационные системы, вычислительную систему, систему ввода данных и команд управления, соединенную с вычислительной системой, многофункциональную систему индикации и сигнализации, датчики системы воздушных параметров и коммутационные устройства, отличающийся тем, что спутниковая навигационная система выполнена в виде системы автоматического зависимого наблюдения вещательного режима АЗН-В для обеспечения систем навигации, управления полетом и вектором тяги силовой установки, индикации и сигнализации информацией о параметрах движения и координатах своего и других летательных аппаратов, вычислительная система имеет возможность решения как навигационных задач, так и задач управления полетом и вектором тяги силовой установки, контроля и оценки состояния бортовых систем и агрегатов летательного аппарата, включает концентратор сети информационного обмена, компьютер управления шиной обмена данными и соединенную с ним саму шину обмена для двухсторонней передачи информации в системах управления, индикации и сигнализации, адаптеры шины обмена данными и интерфейсные модули системы автоматического зависимого наблюдения АЗН-В, инерциальной системы навигации и датчиков системы воздушных параметров, приводы и датчики систем управления полетом и вектором тяги силовой установки и датчики бортовых систем, при этом концентратор сети информационного обмена соединен двухсторонними связями с вычислительной системой, с компьютером управления шиной обмена данными, с многофункциональной системой индикации и сигнализации, через интерфейсные модули с системой автоматического зависимого наблюдения АЗН-В, с инерциальной системой навигации и с датчиками системы воздушных параметров, а шина обмена данными через адаптеры соединена с приводами и датчиками системы управления полетом летательного аппарата и системы управления вектором тяги силовой установки, а также с датчиками бортовых систем.
| НАВИГАЦИОННЫЙ КОМПЛЕКС ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2170409C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС ЛЕТАТЕЛЬНОГО АППАРАТА | 2000 |
|
RU2170410C1 |
| ПИЛОТАЖНО-НАВИГАЦИОННЫЙ КОМПЛЕКС | 1990 |
|
SU1797383A1 |
| ИНТЕГРИРОВАННЫЙ БОРТОВОЙ ПИЛОТАЖНО-НАВИГАЦИОННЫЙ КОМПЛЕКС ВЕРТОЛЕТА | 2002 |
|
RU2204504C1 |
| КОМПЛЕКС БОРТОВОГО ОБОРУДОВАНИЯ УПРАВЛЕНИЯ ПОЛЁТОМ ВЕРТОЛЁТА | 2002 |
|
RU2220073C1 |

