Изобретение относится к области авиации, в частности к бортовому оборудованию, обеспечивающему навигацию, индикацию и управление вертолетом.
Известен комплекс бортового оборудования управления полетом вертолета МИ-172, содержащий систему датчиков параметров полета и интегрированную систему радионавигации и радиосвязи, параллельно соединенные с системой индикации и вычислителем директорного управления, который связан с системой индикации, четырехканальный автопилот, имеющий последовательные рулевые машины с ограниченным ходом, соединенный на входе с системой датчиков параметров полета и на выходе - с комбинированным агрегатом управления системы управления вертолетом. (Б. М. Валишев и С. Д. Аристов. МИ-172 - шаг в будущее. - Ж. "Вертолет", 4 (7), г.Казань, 1999). Данный аналог принят за прототип.
Основным недостатком известного комплекса бортового оборудования управления полетом вертолета, принятого за прототип, является отсутствие связи директорного управления с автопилотом, не позволяющее полностью реализовать автоматическое выполнение режимов траекторного управления, с помощью которого пилот должен вручную отрабатывать команды по стрелкам директорного прибора, что, с одной стороны, намного проще, а с другой, повышает нагрузку на пилота.
Другим недостатком является отсутствие во всех каналах управления триммерных электромеханизмов, так как диапазон отклонения последовательной рулевой машины автопилота около 17% является недостаточным.
Основной задачей, на решение которой направлено заявляемое изобретение, является обеспечение автоматического траекторного управления полетом вертолета.
Техническим результатом, достигаемым при осуществлении заявленного изобретения, является обеспечение автоматического траекторного управления полетом вертолета и, как следствие, повышение эффективности использования вертолета.
Указанный технический результат достигается тем, что в известном комплексе бортового оборудования управления полетом вертолета, содержащим систему датчиков параметров полета и интегрированную систему радионавигации и радиосвязи, параллельно соединенные с системой индикации и вычислителем директорного управления, последний связан с системой индикации, автопилот, имеющий последовательные рулевые машины с ограниченным ходом, соединенный на входе с системой датчиков параметров полета и на выходе - с комбинированным агрегатом управления системы управления вертолетом, согласно предложенному техническому решению
в него введен вычислитель траекторного управления, входы контура прямой связи которого подключены к выходам вычислителя директорного управления и системы датчиков параметров полета, а выходы подключены к входам каналов тангажа, крена, направления и общего шага автопилота;
в него введены триммерные электромеханизмы, кинематически соединенные с системой управления вертолетом, а входы подключены к выходам контура автотриммирования вычислителя траекторного управления, входы которого подключены к выходам датчиков обратной связи рулевых машин, а выходы - к триммерным электромеханизмам тангажа, крена, направления и общего шага.
Приведенный заявителем анализ уровня техники позволил установить, что аналоги, характеризующиеся совокупностями признаков, тождественными всем признакам заявленного комплекса бортового оборудования управления полетом вертолета, отсутствуют. Следовательно, заявленное техническое решение соответствует условию патентоспособности "новизна".
Результаты поиска известных решений в данной области техники с целью выявления признаков, совпадающих с отличительными от прототипа признаками заявляемого технического решения, показали, что они не следуют явным образом из уровня техники. Из определенного заявителем уровня техники не выявлена известность влияния предусматриваемых существенными признаками из заявляемого технического решения преобразований на достижение указанного технического результата. Следовательно, заявляемое техническое решение соответствует условию патентоспособности "изобретательский уровень".
На представленном чертеже показана блок-схема комплекса бортового оборудования управления полетом вертолета.
Комплекс бортового оборудования управления полетом вертолета содержит систему датчиков параметров полета 1 и интегрированную систему радионавигации и радиосвязи 2, параллельно соединенные с системой индикации 3 и вычислителем директорного управления 4, последний связан с системой индикации 3, автопилот 5, имеющий последовательные рулевые машины с ограниченным ходом, соединенный на входе с системой датчиков параметров полета 1 и на выходе - с комбинированным агрегатом управления 6 системы управления 7 вертолетом, вычислитель траекторного управления 8, входы контура прямой связи которого подключены к выходам вычислителя директорного управления 4 и системы датчиков параметров полета 1, а выходы подключены к входам каналов тангажа, крена, направления и общего шага автопилота 5, триммерные электромеханизмы 9, кинематически соединенные с системой управления 7, а входы подключены к выходам контура автотриммирования вычислителя траекторного управления 8, входы которого подключены к выходам датчиков обратной связи рулевых машин автопилота 5, а выходы - к триммерным электромеханизмам 9 тангажа, крена, направления и общего шага. Вычислитель траекторного управления 8 в каналах тангажа, крена, направления и общего шага имеет два контура и осуществляет функции:
- связь вычислителя директорного управления 4 с автопилотом 5 - контур прямой связи,
- управление триммерными электромеханизмами 9, установленными в каждом канале системы управления 7 вертолетом для расширения диапазонов отклонения органов управления по сигналам автопилота 5 - контур автотриммирования,
- обеспечивает в канале направления при Vпp≥102 км/ч координированный разворот вертолета, а при Vпр<102 км/ч астатическую стабилизацию угла курса.
Комплекс бортового оборудования управления полетом вертолета работает следующим образом.
Автоматическое траекторное управление осуществляется по каналам крена, тангажа, направления и общего шага, для чего сигналы из системы датчиков параметров полета 1 и интегрированной системы радионавигации и радиосвязи 2 подаются параллельно в систему индикации 3 и вычислитель директорного управления 4. Сигналы вычислителя директорного управления 4 по соответствующим каналам одновременно подаются на систему индикации 3 и используются как входные сигналы контура прямой связи вычислителя траекторного управления 8, которые подвергаются следующим преобразованиям:
интегрируются с умножением на коэффициент К1;
умножаются на масштабный коэффициент К2;
складываются с сигналом угловой скорости, умноженным на коэффициент К3.
Коэффициенты K1, К2 и К3 подбираются по каждому каналу таким образом, чтобы обеспечить надлежащее качество автоматического управления вертолетом при выполнении режимов траекторного управления. После обработки сигналов в вычислителе траекторного управления 8, эти сигналы подаются на входы каналов крена, тангажа и высоты автопилота 5. При выполнении некоторых режимов траекторного управления (заход на посадку, выход на заданную высоту полета и т. п. ) требуются значительные изменения балансировочного положения органов управления. Контур автотриммирования вычислителя траекторного управления 8 обеспечивает центрирование последовательных рулевых машин автопилота 5, связанных с комбинированным агрегатом управления 6, с помощью триммерных электромеханизмов 9, воздействующих на систему управления 7. Входным сигналом контура автотриммирования является сигнал датчика обратной связи рулевой машины автопилота 5. Если рулевая машина отклоняется более чем на 25% своего хода (в одну сторону) и находится в этом положении более 1,5 с, контур автотриммирования вычислителя траекторного управления 8 включает триммерный электромеханизм 9 в том же направлении, куда отклонилась рулевая машина автопилота 5. Задержка в 1,5 с требуется для предотвращения ложных включений триммерного электромеханизма 9. Для обеспечения безопасности полета при отказе триммерного электромеханизма в контуре автотриммирования предусмотрена электронная модель двигателя механизма автотриммирования и компаратор, сравнивающий выходной сигнал модели с фактическим отклонением ручки управления. При превышении допустимого различия между сигналами компаратор выдает сигнал на отключение контура автотриммирования вычислителя траекторного управления 8 с одновременной сигнализацией отказа триммерного электромеханизма 9 в системе индикации 3.
Предложенный комплекс бортового оборудования управления полетом вертолета обеспечивает директорное (полуавтоматическое) траекторное управление при полете по курсу, заходе на посадку, вертикальных и горизонтальных маневрах, что существенно снижает психофизическую нагрузку на экипаж, особенно в условиях полета по Правилам полетов по приборам, и повышает эффективность использования вертолетов.
На данный комплекс бортового оборудования управления полетом вертолета разработана техническая документация, изготовлен и опробован опытный образец на серийном вертолете.
| название | год | авторы | номер документа |
|---|---|---|---|
| ВЕРТОЛЕТ ДЛЯ ТРАНСПОРТИРОВКИ ГРУЗА НА ВНЕШНЕЙ ПОДВЕСКЕ | 2003 |
|
RU2265555C2 |
| АВТОПИЛОТ ДЛЯ САМОЛЕТОВ МАЛОЙ АВИАЦИИ | 2024 |
|
RU2832351C1 |
| Комплекс бортового оборудования вертолетов и самолетов авиации общего назначения | 2016 |
|
RU2640076C2 |
| СИСТЕМА УПРАВЛЕНИЯ САМОЛЕТОМ | 2003 |
|
RU2235043C1 |
| ЛЕГКИЙ МНОГОЦЕЛЕВОЙ САМОЛЕТ | 2003 |
|
RU2235044C1 |
| Командно-пилотажный индикатор вертолета | 2021 |
|
RU2778955C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2019 |
|
RU2716886C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЕРТОЛЕТОМ | 2004 |
|
RU2282562C1 |
| КОМАНДНО-ПИЛОТАЖНЫЙ ИНДИКАТОР | 2018 |
|
RU2711196C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПОЛЕТОМ САМОЛЕТА | 2006 |
|
RU2312793C1 |
Изобретение относится к бортовому оборудованию вертолета, обеспечивающему навигацию, индикацию и управление. Комплекс содержит систему датчиков параметров полета и интегрированную систему радионавигации и радиосвязи, параллельно соединенные с системой индикации и вычислителем директорного управления. Последний связан с системой индикации. В комплекс входит также автопилот, имеющий последовательные рулевые машины с ограниченным ходом. Автопилот соединен на входе с системой датчиков параметров полета и на выходе - с комбинированным агрегатом управления системы управления вертолетом. Отличие комплекса заключается в том, что в него введен вычислитель траекторного управления, входы контура прямой связи которого подключены к выходам вычислителя директорного управления и системы датчиков параметров полета, а выходы подключены к входам каналов тангажа, крена, направления и общего шага автопилота. Изобретение позволяет реализовать автоматическое траекторное управление полетом вертолета и, как следствие, повысить эффективность его использования. 1 з.п.ф-лы, 1 ил.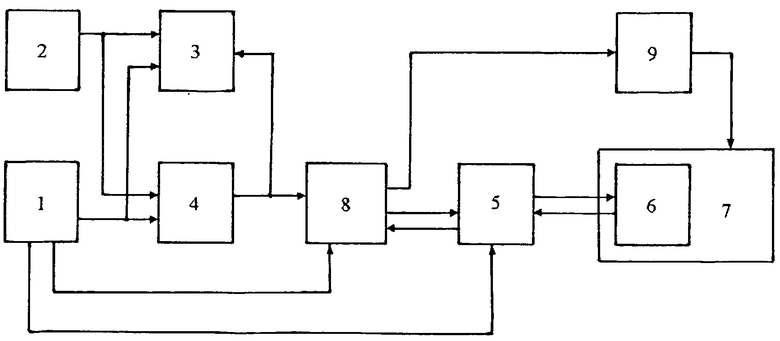
| Валишев Б.М | |||
| и др | |||
| Приспособление для воспроизведения изображения на светочувствительной фильме при посредстве промежуточного клише в способе фотоэлектрической передачи изображений на расстояние | 1920 |
|
SU172A1 |
| - Ж | |||
| "Вертолет", 1999, №4, г.Казань | |||
| СИСТЕМА УПРАВЛЕНИЯ ПОЛОЖЕНИЕМ ВЕРТОЛЕТА | 1999 |
|
RU2150137C1 |
| Устройство для предупреждения приема поездов на пути, на которые производится прием как четных, так и нечетных поездов | 1924 |
|
SU6249A1 |
| Вертолетный автопилот | 1990 |
|
SU1837033A1 |
