Изобретение относится к области транспортных средств, а именно к зеркальным оптическим системам наблюдения за зоной, не просматриваемой с места водителя, и может быть использовано для повышения точности ориентирования зеркала обзора в пространстве относительно транспортного средства, при обеспечении наблюдения через зеркало за объектом контроля и для определения формы и размеров зеркала, обеспечивающих водителю наблюдение за объектами, требующими контроля, вне зоны прямой видимости.
Известен способ для разработки формы поверхности, размеров и углов наклона автомобильного зеркала заднего вида RU БИПМ № 23, 20.08.2000, № 98118772/28 (09.10.1998), МПК 7 G 02 В 5/08.
Этот способ разработки зеркала заднего вида предусматривает установку источника света в пространственном положении глаза водителя, установку отражательного зеркала в пространственном положении моделируемого зеркала заднего вида; установку объекта заднего плана в положении объекта за моделируемым зеркалом заднего вида, направление источника света на заднюю тестируемую область на поверхности указанного отражательного зеркала; регулирование указанной поверхности отражательного зеркала, делая указанный свет отражательным в заданную область объекта заднего плана; направление света на следующую тестируемую область; повторение операций на всей заданной тестируемой области и принятие формы поверхности зеркала, как зеркала заднего вида.
Однако этот способ трудоемок, громоздок и сложен, требует больших затрат, недостаточно точен для ориентации зеркала и определения его размеров и формы.
Целью изобретения является упрощение определения формы и размеров плоского зеркала обзора для транспортного средства, повышение точности его ориентирования в пространстве при наблюдении через него за объектами контроля.
Указанная цель достигается тем, что измеряют координаты точек: точки в пространственном положении глаза водителя в транспортном средстве, например, точки Г (хг; уг; zг), опорной точки на объекте наблюдения, который контролируется через зеркало обзора, например, точки Н (хн; ун; zн), опорной точки на зеркале транспортного средства, в которой отражается опорная точка Н на объекте наблюдения при контроле за ней водителем через зеркало обзора, например, точка М с координатами (xм; yм, zм), и определяют углы наклона плоскости зеркала обзора к координатным плоскостям по формулам:
α =аrссоs(zМ-zЕ)/[(хМ-хЕ)2+(уМ-уЕ)2+(zМ-zЕ)2]1/2;
β =аrссоs(уМ-уЕ)/[(хМ-хЕ)2+(уМ-уЕ)2+(zМ-zЕ)2]1/2;
γ =аrссоs(хМ-хЕ)/[(хМ-хЕ)2+(уМ-уЕ)2+(zМ-zЕ)2]1/2;
по которым устанавливают наклон зеркала обзора к координатным плоскостям;
координаты точки Е (xE; уE; zE) - как точки пересечения биссектрисы угла ГМН со стороной ГН определяют по формулам:
хE=(xг+λ · хн)/(1+λ );
уE=(уг+λ · ун)/(1+λ );
zE=(zг+λ · zн)/(1+λ );
коэффициент λ определяют по формуле:
затем (а) назначают произвольную точку на объекте контроля и измеряют ее координаты, например, точки К (xк; ук; zк) и рассчитывают координаты точки на зеркале, например L1, в которой отражается луч света от точки К и попадает на глаз водителя - в точку Г, по формулам:
L1=(xг1+λ 1·хк1)/(1+λ 1);
уL1=(уг1+λ 1·ук1)/(1+λ 1);
zL1=(zг1+λ 1·zк1)/(1+λ 1);
где точка Г1 с координатами (xг1; yг1; zг1) есть точка пересечения перпендикуляра, опущенного из точки Г на плоскость зеркала, которые определяются из выражений:
хг1=хг+|·t1;
yг1=yг+m·t1;
zг1=zг+n·t1;
a t1 определяется из уравнения:
А2(хг+|·t1-xм)+В2(уг+m·t1-ум)+С2(zг+n·t1-zм)=0;
в котором коэффициенты A2; В2; C2 находят их условия перпендикулярности прямой ГГ1 плоскости зеркала по формуле:
а показатели |, m, n определяют из уравнений;
|=xм-xг;
m=ум-уг;
n=zм-zг;
аналогично для точки пересечения перпендикуляра, опущенного из точки К на плоскость зеркала, например, точки K1 с координатами (xк1; ук1; zк1) определяют:
хк1=хк+|·t2;
ук1=ук+m·t2;
zк1=zк+n·t2;
t2 определяют из уравнения:
А2(хк+|·t2-xм)+В2(ук+m·t2-ум)+С2(zк+n·t2-zм)=0;
λ 1 определяют по формуле:
затем повторяются операции (а) для множества точек на наблюдаемых через зеркало объектах контроля с расчетами и определяют координаты точек отражения в плоскости зеркала, наблюдаемых водителем, и по крайним точкам отражения определяют конфигурацию (форму) и размеры зеркала.
Совмещают плоскость зеркала с чертежом, на котором отмечают найденные точки отражения в зеркале от точек на объектах контроля, по расстоянию между тремя точками отражения, а эти расстояния находят по формулам, например, между точками М и L1:
ML1=d1=[(xм-х1)2+(yм-y1)2+(zм-z1)2]1/2.
С целью упрощения способа назначают произвольные точки на объекте контроля, за которыми ведется наблюдение через зеркало обзора, расположенные на краю контура объекта наблюдения, видимого водителем через зеркало обзора.
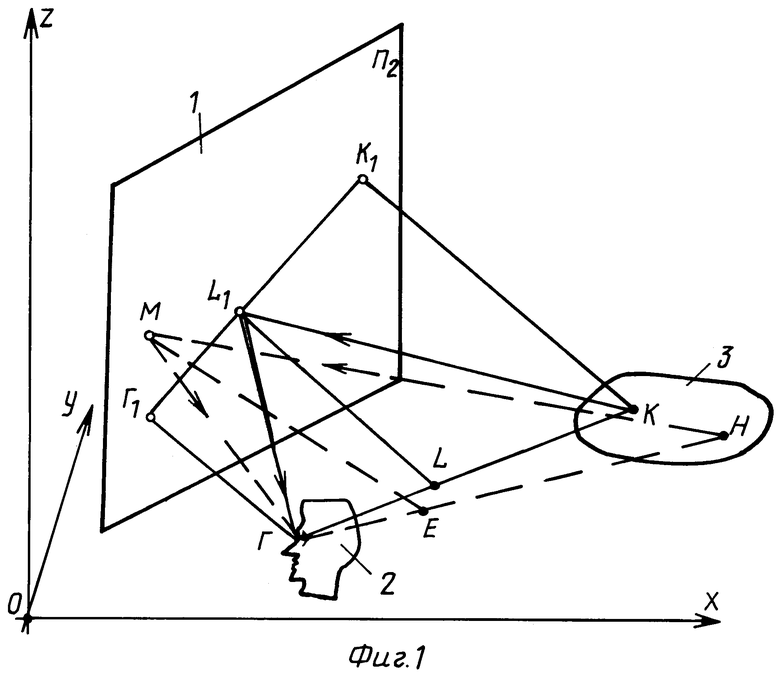
На фиг.1 показана схема расположения водителя при наблюдении через зеркало обзора, установленного на транспортном средстве, за объектом контроля.
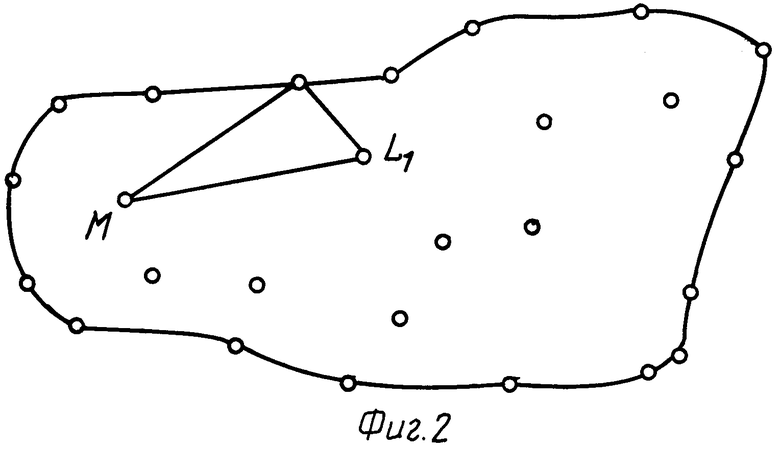
На фиг.2 показана схема построения натуральной величины и конфигурации (формы) зеркала путем совмещения плоскости зеркала с чертежом, на котором отмечены точки отражения в зеркале от точек на объектах контроля и обведены крайние точки, по которым определена конфигурация и размеры зеркала обзора.
Зеркало обзора 1 установлено на транспортное средство (не показано) в пространственном положении моделируемого зеркала обзора в соответствии с конструкцией кабины; точка Г - точка в пространственном положении глаза водителя 2 в транспортном средстве; объект наблюдения 3, который контролируется водителем 2 через зеркало обзора 1, на котором выделена наблюдаемая опорная точка Н; точка М - отражение точки Н на зеркале обзора 1, наблюдаемое водителем 2. Заданы прямоугольные координатные оси O x y z.
Способ осуществляют следующим образом.
Измеряют, например, с помощью измерительной рулетки или метром, координаты: точки Г в пространственном положении глаза водителя 2 в транспортном средстве - (хг; уг; zг); опорной точки на объекте наблюдения 3 Н (хн; ун; zн); опорной точки М на зеркале обзора 1 М (xм; yм; zм), и определяют углы наклона плоскости зеркала обзора 1 - П2 к координатным плоскостям по формулам:
α =аrссоs(zМ-zЕ)/[(хМ-хЕ)2+(уМ-уЕ)2+(zМ-zЕ)2]1/2;
β =аrссоs(уМ-уЕ)/[(хМ-хЕ)2+(уМ-уЕ)2+(zМ-zЕ)2]1/2;
γ =аrссоs(хМ-хЕ)/[(хМ-хЕ)2+(уМ-уЕ)2+(zМ-zЕ)2]1/2;
по которым устанавливают наклон зеркала обзора 1 к координатным плоскостям с помощью измерителя углов (угломера);
координаты точки Е (хE; уE; zE) - как точки пересечения биссектрисы угла ГМН со стороной ГН, определяют по формулам:
хE=(xг+λ · хн)/(1+λ );
уE=(уг+λ · ун)/(1+λ );
zE=(zг+λ · zн)/(1+λ );
а коэффициент (определяют по формуле:
затем (а) назначают произвольную точку на объекте контроля 3 и измеряют ее координаты, например точки К (xк; yк; zк) с помощью измерительной рулетки или метра, и рассчитывают координаты точки на зеркале обзора 1, в которой отражается луч света от точки К и попадает на глаз водителя 3 в точке Г, по формулам:
х1=(xг1+λ 1·хк1)/(1+λ 1);
у1=(уг1+λ 1·ук1)/(1+λ 1);
z1=(zг1+λ 1·zк1)/(1+λ 1);
где точка Г1 с координатами (хг1; yг1; zг1) есть точка пересечения перпендикуляра, опущенного из точки Г на плоскость зеркала 1, которые определяются по выражениям:
хг1=хг+|· t1;
yг1=yг+m· t1;
zг1=zг+n· t1;
a t1 определяется из уравнения:
А2(хг+|· t1-xм)+В2(уг+m· t1-ум)+С2(zг+n· t1-zм)=0;
в котором коэффициенты A2, В2, С2 находят из условия перпендикулярности прямой ГГ1 плоскости зеркала 1 по формуле:
а показатели I, m, n определяют из уравнений:
|=xм-xг;
m=ум-уг;
n=zм-zг;
аналогично для точки пересечения перпендикуляра, опущенного из точки К на плоскость зеркала 1, то есть для точки K1 с координатами (хк1; ук1; zк1) определяют:
хк1=хк+|· t2;
ук1=ук+m· t2;
zк1=zк+n· t2;
t2 определяют из уравнения:
А2(хк+|· t2-xм)+В2(ук+m· t2-ум)+С2(zк+n· t2-zм)=0;
a λ 1 определяют по формуле:
Затем повторяются операции (а) для множества точек на наблюдаемых через зеркало 1 объектах контроля 3 расчетами и определяют координаты точек отражения в плоскости зеркала 1, наблюдаемых водителем 2, и по крайним точкам отражения определяют конфигурацию (форму) и размеры зеркала 1; совмещают плоскость зеркала 1 с чертежом, на котором отмечают найденные точки отражения в зеркале 1 от точек на объектах контроля 3, по расстоянию между тремя точками отражения, а эти расстояния находят по формулам, например, между точками М и L1:
ML1=d1=[(xм-х1)2+(yм-y1)2+(zм-z1)2]1/2.
С целью упрощения способа назначают произвольные точки на объекте контроля 3, за которыми ведется наблюдение через зеркало обзора 1, расположенные на краю контура объекта наблюдения 3, видимого водителем 2 через зеркало обзора 1.
Данный способ обеспечивает упрощение определения формы и размеров плоского зеркала обзора для транспортного средства, повышение точности его ориентации в пространстве при наблюдении через него за объектами контроля.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ обзорной пассивной однопозиционной моноимпульсной трёхкоординатной угломерно-разностно-доплеровской локации перемещающихся в пространстве радиоизлучающих объектов | 2017 |
|
RU2661357C1 |
| Способ пассивной однопозиционной угломерно-доплеровской локации перемещающихся в пространстве радиоизлучающих объектов | 2019 |
|
RU2699552C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КОМПОНЕНТ ГЕОМАГНИТНОГО ПОЛЯ | 1986 |
|
SU1426256A1 |
| Система зеркал заднего вида транспортного средства | 1988 |
|
SU1594025A1 |
| СПОСОБ ДОСТАВКИ ИЗЛУЧЕНИЯ НА ДВИЖУЩИЙСЯ ОБЪЕКТ И КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2124740C1 |
| Способ обнаружения подводного источника широкополосного шума | 2019 |
|
RU2715431C1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ СКОРОСТИ ОБЪЕКТА | 1992 |
|
RU2046343C1 |
| ЛАЗЕРНАЯ СИСТЕМА УПРАВЛЕНИЯ ДОРОЖНО-СТРОИТЕЛЬНОЙ МАШИНОЙ | 1994 |
|
RU2090707C1 |
| ОПТИЧЕСКИЙ ЛОКАТОР КРУГОВОГО ОБЗОРА | 2009 |
|
RU2453866C2 |
| Трехкомпонентная мера магнитного момента | 2024 |
|
RU2824326C1 |
Способ относится к зеркальным системам наблюдения за зоной, не просматриваемой с места водителя. В способе измеряют метром координаты точки в пространственном положении глаза водителя в транспортном средстве, опорной точки на объекте наблюдения, который контролируется через зеркало обзора, опорной точки на зеркале транспортного средства, определяют углы наклона зеркала к координатным плоскостям по формулам, указанным в формуле изобретения, и устанавливают наклон зеркала обзора к координатным плоскостям. Назначают произвольную точку на объекте наблюдения и измеряют ее координаты с помощью измерительной рулетки и рассчитывают координаты точки на зеркале, в которой отражается луч света и попадает на глаз водителя. Затем повторяют операции для множества произвольных точек на объекте наблюдения и определяют координаты соответствующих точек отражения в плоскости зеркала. По крайним точкам отражения определяют форму и размеры зеркала. Обеспечивается упрощение определения формы и размеров зеркала обзора, повышение точности его ориентирования в пространстве. 2 з.п. ф-лы, 2 ил.
α =аrссоs(zМ-zЕ)/[(хМ-хЕ)2+(уМ-уЕ)2+(zМ-zЕ)2]1/2;
β =аrссоs(уМ-уЕ)/[(хМ-хЕ)2+(уМ-уЕ)2+(zМ-zЕ)2]1/2;
γ =аrссоs(хМ-хЕ)/[(хМ-хЕ)2+(уМ-уЕ)2+(zМ-zЕ)2]1/2,
по которым устанавливают наклон зеркала к координатным плоскостям; координаты точки Е (хЕ; уЕ; zЕ) - как точки пересечения биссектрисы угла ГМН со стороной ГН, определяют по формулам
хЕ=(xг+λ · хн)/(1+λ );
уЕ=(уг+λ · ун)/(1+λ );
zЕ=(zг+λ · zн)/(1+λ ),
а коэффициент λ определяют по формуле
затем (а) назначают произвольную точку на объекте контроля и измеряют ее координаты, например точки К с координатами (хк; ук; zк), и рассчитывают координаты точки на зеркале, в которой отражается луч света от точки К и попадает на глаз водителя, по формулам
хL1=(xг1+λ 1·хк1)/(1+λ 1);
уL1=(уг1+λ 1·ук1)/(1+λ 1);
zL1=(zг1+λ 1·zк1)/(1+λ 1),
где точка Г1 с координатами (хг1; уг1; zг1) есть точка пересечения перпендикуляра, опущенного из точки Г на плоскость зеркала, которые определяются из выражений
хг1=хг+I· t1;
yг1=yг+m· t1;
zг1=zг+n· t1,
a t1 определяется из уравнения
А2(хг+I· t1-xм)+В2(уг+m· t1-ум)+С2(zг+n· t1-zм)=0,
в котором коэффициенты А2, В2, С2 находят из условия перпендикулярности прямой ГГ1 плоскости зеркала по формуле
а показатели I, m, n определяют из уравнений
I=xм-xг;
m=ум-уг;
n=zм-zг,
аналогично для точки пересечения перпендикуляра, опущенного из точки К на плоскость зеркала, например точки K1 с координатами (хк1; ук1; zк1), определяют:
хк1=хк+I· t2;
ук1=ук+m· t2;
zк1=zк+n· t2,
t2 определяют из уравнения
А2(хк+I· t2-xм)+В2(ук+m· t2-ум)+С2(zк+n· t2-zм)=0,
a λ 1 определяют по формуле
затем повторяются операции (а) для множества других точек на наблюдаемых через зеркало объектах контроля с расчетами и определяют координаты точек отражения в плоскости зеркала, наблюдаемых водителем, и по крайним точкам отражения определяют форму и размеры зеркала.
ML1=d1=[(xм-хL1)2+(yм-yL1)2+(zм-zL1)2]1/2.
| RU 98118772 A, 20.08.2000 | |||
| Система зеркал заднего вида транспортного средства | 1988 |
|
SU1594025A1 |
| US 6501536 B1, 31.12.2002 | |||
| US 5481408 A, 02.01.1996 | |||
| US 5096281 A, 17.03.1992. | |||

