Изобретение относится к устройствам для измерения параметров железнодорожного пути при помощи путеизмерительных вагонов, а именно продольного уклона пути.
Цель изобретения - повышение точное- ти измерения.
На чертеже представлена блок-схема устройства для измерения продольного уклона железнодорожного пути.
Устройство для измерения продольного уклона железнодорожного пути содержит датчик 1 ускорений, ось чувствительности которого параллельна продольной оси кузова вагона, пороговый элемент 2, датчик 3 пути, логический элемент И 4, блок 5 силовой коррекции, выключатель 6 блока силовой коррекции, включатель 7 азимутальной коррекции, гироузел 8, датчик 9 азимута (например, гирополукомпас), блок 10 умножения, задатчик 11 широты, сумматор 12, четыре датчика 13 вертикальных перемещений букс относительно кузова и регистра- тор 14. Гироузел 8 и блок 5 силовой коррекции образуют гировертикаль 15.
Выход датчика 1 ускорений соединен с входом порогового элемента 2, выход которого соединен с одним из входов логичес- кого элемента И 4, другой вход которого соединен с выходом датчика 3 пути, а выход - с управляющими входами выключателя 6 блока силовой коррекции и включателя 7 азимутальной коррекции соответственно.
Выход датчика 9 азимута соединен с одним из входов блока 10 умножения, другой вход которого соединен с выходом задат- чика 11 широты, а выход через включатель 7 азимутальной коррекции - с входом гироузла 8, который через выключа- тель 6 блока силовой коррекции соединен также с выходом блока 5 силовой коррекции. Выход гировертикали 15 соединен с входом сумматора 12, остальные входы которого соединены с выходами датчиков 13 вертикальных перемещений, а выход сумматора 12 соединен с входом регистратора 14.
В гировертикалях наряду с гироузлом имеется силовая (маятниковая) коррекция, обеспечиваюшая ориентацию гироплатфор- мы в плоскости горизонта. Однако гировертикаль, у ;тановленная на железнодорожном экипаже, сама по себе не может обеспечить измерения уклона пути с требуемой точностью, поскольку при движении возникают ускорения до 1 м/с, вызывающие отклонения маятника системы коррекции и, следовательно, гироплатформы. Это приводит к ошибкам измерения, достигающим 0,03-0,05 град. В результате возникает необходимость отключения силовой коррекции на время ускоренного движения вагона. При этом гировертикаль временно превращается в астатический гироскоп и отклоняется от линии вертикали со скоростью.
0
5 0
5 0
5
0
5
Q 5
зависящей от места расположения ее на земной поверхности (широты местности) и направления движения (азимута).
Скорость отклонения (ухода) постоянна и определяется по формуле:
ш U-simj)-cos9,
где-ф - угол между меридианом и направлением движения (азимут); Ф - географическая широта; и 7,3-10 рад/с - скорость вращения Земли.
За время отключения силовой коррекции величина ухода может составить 0,005- 0,01 рад, что превышает допустимую погрешность измерения.
В предлагаемом устройстве используется дополнительная азимутальная коррекция, автоматически включаемая в момент отключения силовой коррекции. Азимутальная коррекция вызывает вращение гироплатформы . со скоростью W вместе с вертикалью места, т.е. компенсирует уход гироплатформы от вертикали на время отключения силовой коррекции при ускоренном движении вагона. Для получения корректирующего воздействия на гировертикаль, пропорционального величине w, используют датчик 9 азимута - гирополукомпас, на выходе которого формируется сигнал, пропорциональный sinijj, потенциометрический задатчик 11 широты, на выходе которого формируется сигнал, пропорциональный costp, и блок 10 умножения, формирующий сигнал, пропорциональный W.
Устройство работает следующим образом.
Перед началом движения,по измеряемому пути на стоянке устанавливают величину выходного сигнала задатчика 11 широты, включают гировертикаль 15 с работающим блоком 5 силовой коррекции. После приведения гировертикали в рабочее состояние система готова к работе.
Во время стоянки перед началом движения отсутствуют сигналы с датчика 1 ускорений и датчика 3 пути. Поэтому отсутствует сигнал на входе логического элемента И 4, а следовательно, и на управляющих входах выключателя 6 блока силовой коррекции и включателя 7 азим-у- тальной коррекции. Гироплатформа удерживается по линии вертикали места блока 5 силовой коррекции. При движении с ускорениями (разгон, торможение) свыше заданной величины имеются сигналы на выходах датчика 1 ускорений и датчика 3 пути а, следовательно, и на выходе порогового элемента И 4. Выключатель 6 отключает маятниковую коррекцию, а включатель 7 азимутальной коррекции одновременно включает азимутальную коррекцию и гиро- платформа удерживается по линии вертикали места азимутальной коррекцией. При равномерном движении имеется сигнал с датчика 3 пути, но отсутствует сигнал с датчика ускорений или он меньше заданной величины. Тогда отсутствует сигнал на выходе порогового элемента 2, а следовательно, и на выходе логического элемента И 4. В этом случае включен блок 5 силовой коррекции гировертикали 15. При включенной азимутальной коррекции сигнал с выхода блока 10 умножения, пропорциональный произведению синуса угла азимута и косинуса угла широты, поступает на вход гироузла 8 через включатель 7 и приводит гироплатформу во врашение со скоростью вращения Земли.
Сигнал с гировертикали 15, пропорциональный наклону кузова вагона относительно вертикального положения, поступает на вход сумматора 12, на другие входы которого поступают сигналы датчиков 13, пропорциональные перемещениям букс двух базовых колесных пар вагона. Алгебраическая сумма сигналов с датчиков 13 вертикальных перемещений пропорциональна углу наклона кузова к плоскости пути. С входа сумматора 12 сигнал, пропорциональный углу профиля пути, поступает на вход регистратора 14.
После разгона при движении вагона с постоянной скоростью сигналы на выходах элементов 2 и 4 исчезают, что приводит к отключению азимутальной коррекции и включению блока 5 силовой коррекции.
0
Формула изобретения
Устройство для измерения продольного уклона железнодорожного пути, содержащее гировертикаль с блоком силовой коррекции, выключатель блока силовой коррекции, датчики вертикальных перемещений букс относительно кузова, датчик пройденного пути, регистратор и сумматор, входы которого соединены с выходом гировертикали и выходами датчиков вертикальных перемещений букс, а выход сумматора соединен с входом регистратора, отличающееся тем, что., с целью повыщения точности измерений, оно снабжено системой азимутальной коррек5 ции, включающей в себя датчик ускорений, пороговый элемент, логический элемент И, датчик азимута, задатчик широты, блок умножения и включатель азимутальной коррекции, при этом выход датчика ускорений соединен с входом порогового элемента, вы0 ход которого подключен к одному входу логического элемента И, другой вход которо- гб соединен с выходом датчика пройденного пути, а выход логического элемента И подключен к входам выключателя блока силовой коррекции и включателя азимутальной коррекции, выходы которых соединены с входом гировертикали, а входы - соответственно с выходом бока силовой коррекции и выходом бока умножения, входы которого соединены с выходом датчика азимута и выходом задатчика широты.
5
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО КОРРЕКЦИИ ГИРОВЕРТИКАЛИ | 1998 |
|
RU2145057C1 |
| САМООРИЕНТИРУЮЩАЯСЯ СИСТЕМА ГИРОКУРСОКРЕНОУКАЗАНИЯ | 2001 |
|
RU2192622C1 |
| Гирополукомпас | 2024 |
|
RU2826371C1 |
| СИСТЕМА ГИРОКУРСОКРЕНОУКАЗАНИЯ | 2001 |
|
RU2186339C1 |
| Гирополукомпас с аналитической азимутальной коррекцией | 2023 |
|
RU2799738C1 |
| ГИРОИНЕРЦИАЛЬНЫЙ МОДУЛЬ ГИРОСКОПИЧЕСКОГО ИНКЛИНОМЕТРА | 2012 |
|
RU2499224C1 |
| ИНЕРЦИАЛЬНАЯ НАВИГАЦИОННАЯ СИСТЕМА | 1991 |
|
RU2020417C1 |
| Гирополукомпас с компенсацией температурного дрейфа | 2024 |
|
RU2818661C1 |
| Одноосный индикаторный горизонтальный гиростабилизатор | 2020 |
|
RU2750027C1 |
| ГИРОГОРИЗОНТ ДЛЯ АВТОМАТИЗИРОВАННЫХ СИСТЕМ УПРАВЛЕНИЯ ОГНЕМ | 2000 |
|
RU2178143C1 |
Изобретение относится к устройствам для измерения параметров железнодорожного пути при помощи путеизмерительных вагонов, в частности для измерения продольного уклона пути. Цель изобретения - повышение точности измерения. Устройство для измерения продольного уклона железнодорожного пути содержит датчик 1 ускорений, пороговый элемент 2, датчик 3 пути, логический элемент И 4, блок 5 силовой коррекции, выключатель 6 блока 5, включатель 7 азимутальной коррекции, гироузел 8, датчик 9 азимута, блок 10 умножения, за- датчик 11 широты, сумматор 12, четыре датчика 13 вертикальных перемешений букс относительно кузова и регистратор 14. Гироузел 8 и блок 5 образуют гировертикаль 15. Выход датчика 1 соединен с входом элемента 2, выход которого соединен с одним из входов логического элемента 4, другой вход которого подключен к выходу датчика 3 пути, а выход соединен с уп- равляюшими входами выключателя 6 и включателя 7. Выход датчика 9 соединен с одним из входов блока 10, другой вход которого подключен к выходу задатчика 1 1, а выход блока 10 соединен через выключатель 7 с входом гироузла 8, который через выключатель 6 соединен с выходом блока 5. Выход гировертикали 15 соединен с одним из входов сумматора 12, другие входы которого соединены с выходами датчиков 13, а выход сумматора 12 соединен с входом регистратора 14. 1 ил. (Л to сх со со 4 О5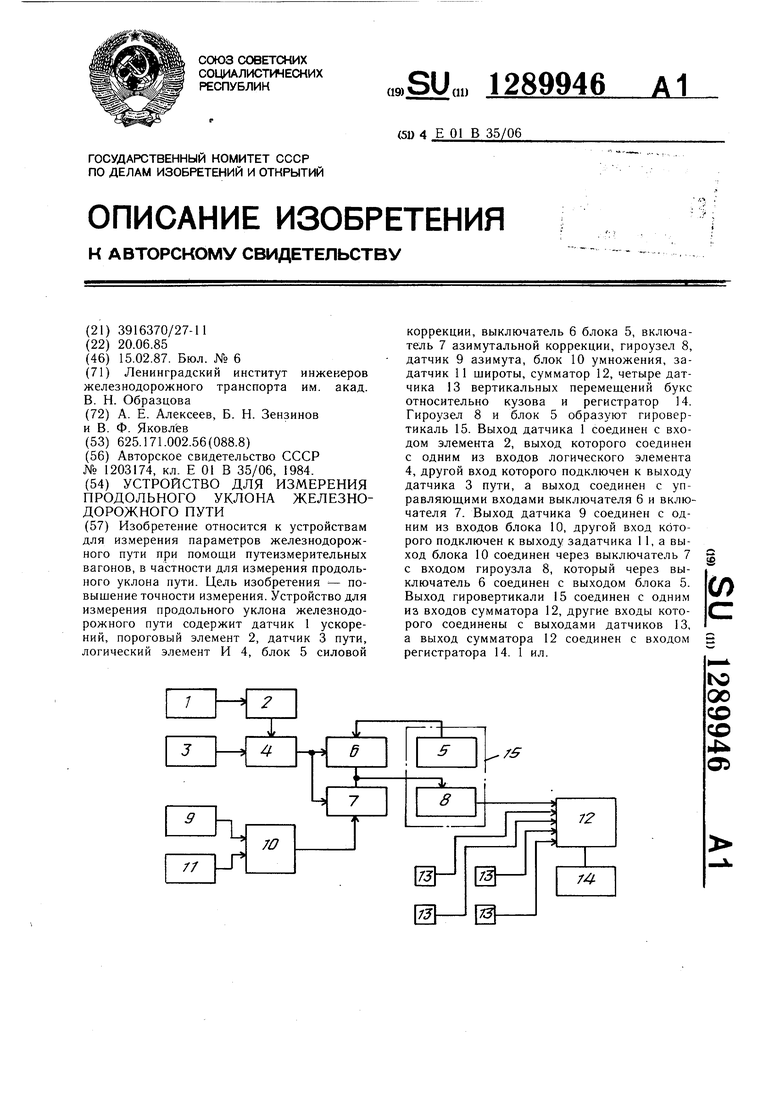
| Устройство для измерения продольного профиля пути | 1984 |
|
SU1203174A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
