Предлагаемое техническое решение относится к области оборонной техники, в частности к мобильным зенитным ракетным комплексам (ЗРК), и может быть использовано для организации противовоздушной обороны войск и военных объектов от поражения средствами воздушного нападения противника в условиях радиоэлектронного подавления.
Известны ЗРК, например американские «Хок», «Пэтриот», «Усовершенствованный Хок» [см. Ф.К.Неупокоев. «Стрельба зенитными ракетами». Военное изд. М.О. СССР, М., 1980 г., стр.52; Н.А.Василин, А.А.Гуринович. «Зенитные ракетные комплексы». Мн., ООО «Попури»; А.С.Мальгин. «Управление огнем зенитных комплексов». Военное изд. М.О., М, 1987 г., стр.21], отечественные ЗРК серии «БУК» [см. «Оружие России 2000», стр.589, 593], содержащие радиолокационную станцию обнаружения целей (СОЦ), пункт боевого управления (ПБУ) или командный пункт (КП), радиолокационные системы обнаружения, сопровождения и подсвета целей (РЛС) и пусковые установки (ПУ). При этом количество радиолокационных систем и пусковых установок в составе комплекса может быть различным.
Приведенные аналоги обладают недостатком, заключающимся в том, что при организации радиоэлектронного подавления РЭП систем сопровождения и подсвета целей, использующих одновременно импульсное и непрерывное излучение, применяются высокопотенциальные многолучевые системы создания помех. При этом каждая парциальная антенна системы РЭП имеет коэффициент усиления примерно 20 дБ, среднее значение выходной мощности до 50 Вт и ширину диаграммы направленности в азимутальной плоскости не более 15° [Ю.М.Перунов, К.И.Фомичев, Л.М.Юдин. «Радиоэлектронное подавление информационных каналов систем управления оружием». М., «Радиотехника», стр.205].
Воздействие помехи с указанным потенциалом на систему автоматического сопровождения по направлению (АСН), являющуюся основой любой радиолокационной системы наведения управляемого оружия, приводит к потере информации об угловых координатах цели, нарушению селекции по угловым координатам и, как следствие, к невыполнению основной задачи, решаемой радиолокационной системой сопровождения и подсвета цели [Ю.М.Перунов, К.И.Фомичев, Л.М.Юдин. «Радиоэлектронное подавление информационных каналов систем управления оружием». М., «Радиотехника», стр.101, 204].
Наиболее близким по технической сущности и достигаемому результату является самоходная огневая установка зенитного ракетного комплекса «Бук-М1» [«Зенитный ракетный комплекс «БУК -М1». Техническое описание стр.24; «Зенитные ракетные комплексы ПВО сухопутных войск». Техника вооружения вчера, сегодня, завтра. №5-6, 1999 г., стр.41], содержащая радиолокационную станцию, цифровую вычислительную систему, наземный радиолокационный запросчик, телевизионный оптический визир, систему телекодовой связи, пусковое устройство, аппаратуру стартовой автоматики, систему речевой связи, аппаратуру внутренней связи и коммуникации и навигационную аппаратуру.
Известно, что основным показателем помехозащищенности радиоэлектронной системы, а также входящих в его состав отдельных радиоэлектронных устройств является вероятность выполнения ими своих задач в условиях ведения противником радиоэлектронного противодействия [см. «Защита от радиопомех». - под редакцией М.В.Максимова. М., «Советское радио», 1976 г., стр.114]. При этом, если уровень помехового сигнала Рпх существенно превышает уровень сигнала цели Рц на входе того или иного радиоэлектронного устройства, вероятность выполнения им своих задач становится недопустимо низкой. Количественным показателем эффективности подавления помехой полезной информации на выходе радиолокационной станции (РЛС) является коэффициентом подавления αп, равный отношению помехи - сигнал на входе обнаружителя РЛС.
Техническим результатом предлагаемого решения является уменьшение коэффициента подавления активной помехой радиолокационных систем путем создания на их основе разнесенной радиолокационной системы, входящей в состав зенитного ракетного комплекса для обнаружения и поражения целей в условиях радиоэлектронного подавления.
Технический результат достигается тем, что разнесенная радиолокационная система для обнаружения, сопровождения и подсвета целей состоит из цифровой вычислительной системы пункта боевого управления (ЦВС ПБУ), вход-выход которой шиной соединен с первым входом-выходом аппаратуры приема-передачи данных пункта боевого управления (АПД ПБУ), а входы-выходы которой шинами соединены с двумя входами-выходами двух однопозиционных радиолокационных систем (РЛс1, РЛс2). Каждая однопозиционная радиолокационная система включает аппаратуру приема-передачи данных (АПД РЛс), цифровую вычислительную систему (ЦВС РЛс), аппаратуру излучения и обработки импульсного сигнала (АИОИС) частотой  или
или  , пеленгационную антенну (АНТп), радиопередающее устройство подсвета цели (РПДУп) и систему автоматического сопровождения цели по направлению (АСН). Второй вход-выход АПД РЛс соединен шиной с первым входом-выходом ЦВС РЛс, а первый выход цифровой вычислительной системы подключен к входу радиопередающего устройства подсвета цели, второй выход цифровой вычислительной системы соединен со входом аппаратуры излучения и обработки импульсного сигнала, второй вход-выход цифровой вычислительной системы подключен ко второму входу-выходу системы автоматического сопровождения цели по направлению. Выход аппаратуры излучения и обработки импульсного сигнала подключен к первому входу системы автоматического сопровождения цели по направлению, выход системы автоматического сопровождения цели по направлению соединен с первым входом пеленгационной антенны, ко второму входу которой подключен выход радиопередающего устройства подсвета цели. Вход-выход пеленгационной антенны соединен с входом - выходом аппаратуры излучения и обработки импульсного сигнала, второй вход-выход аппаратуры приема-передачи данных пункта боевого управления соединен шиной со входом-выходом первой однопозиционной радиолокационной системы, а третий вход-выход аппаратуры приема-передачи данных пункта боевого управления соединен шиной с первым входом-выходом аппаратуры приема-передачи данных второй однопозиционной радиолокационной системы.
, пеленгационную антенну (АНТп), радиопередающее устройство подсвета цели (РПДУп) и систему автоматического сопровождения цели по направлению (АСН). Второй вход-выход АПД РЛс соединен шиной с первым входом-выходом ЦВС РЛс, а первый выход цифровой вычислительной системы подключен к входу радиопередающего устройства подсвета цели, второй выход цифровой вычислительной системы соединен со входом аппаратуры излучения и обработки импульсного сигнала, второй вход-выход цифровой вычислительной системы подключен ко второму входу-выходу системы автоматического сопровождения цели по направлению. Выход аппаратуры излучения и обработки импульсного сигнала подключен к первому входу системы автоматического сопровождения цели по направлению, выход системы автоматического сопровождения цели по направлению соединен с первым входом пеленгационной антенны, ко второму входу которой подключен выход радиопередающего устройства подсвета цели. Вход-выход пеленгационной антенны соединен с входом - выходом аппаратуры излучения и обработки импульсного сигнала, второй вход-выход аппаратуры приема-передачи данных пункта боевого управления соединен шиной со входом-выходом первой однопозиционной радиолокационной системы, а третий вход-выход аппаратуры приема-передачи данных пункта боевого управления соединен шиной с первым входом-выходом аппаратуры приема-передачи данных второй однопозиционной радиолокационной системы.
Новым в предлагаемой разнесенной радиолокационной системе для обнаружения, сопровождения и подсвета целей является введение в каждую однопозиционную радиолокационную систему волноводной суммарно-разностной системы, трехканального радиоприемного устройства непрерывного сигнала, первого, второго и третьего фазовых детекторов, гетеродина, аппаратуры формирования опорного сигнала и дополнительной антенны. Выход дополнительной антенны соединен с первым входом аппаратуры формирования опорного сигнала, ко второму входу которого подключен второй выход гетеродина, первый выход гетеродина подключен к четвертому входу трехканального радиоприемного устройства непрерывного сигнала. Вход гетеродина соединен с выходом аппаратуры приема-передачи данных, выход аппаратуры формирования опорного сигнала подключен к первым входам первого, второго и третьего фазовых детекторов, ко второму входу которых подключены первый, второй и третий выходы трехканального радиоприемного устройства непрерывного сигнала. Выход пеленгационной антенны подключен к входу волноводной суммарно-разностной системы, первый, второй и третий выходы которой соединены соответственно с первым, вторым и третьим входами трехканального радиоприемного устройства. Выходы первого, второго и третьего фазовых детекторов соединены со вторым, третьим и четвертым входами системы автоматического сопровождения цели по направлению.
На чертеже 1 изображена разнесенная радиолокационная система для обнаружения, сопровождения и подсвета целей.
Разнесенная радиолокационная система для обнаружения, сопровождения и подсвета целей состоит из цифровой вычислительной системы (ЦВС ПБУ) 2 пункта боевого управления (ПБУ) 1 и аппаратуры приема-передачи данных (АПД ПБУ) 3 пункта боевого управления (ПБУ) 1, первой однопозиционной радиолокационной системы (PЛc1) 4, второй однопозиционной радиолокационной системы (РЛс2) 5. Каждая однопозиционная радиолокационная система содержит аппаратуру приема-передачи данных (АПД РЛс) 6, аппаратуру излучения и обработки импульсного сигнала (АИОИС) 7, пеленгационную антенну (АНТп) 8, радиопередающее устройство подсвета цели (РПДУ п) 9, цифровую вычислительную систему (ЦВС РЛс) 10, аппаратуру автоматического сопровождения цели по направлению (АСН) 11, волноводную суммарно-разностную систему (ВСРС) 12, трехканальное радиоприемное устройство непрерывного сигнала (РПУнс) 13, первый, второй, третий фазовые детекторы (ФД) 14, 15, 16, гетеродин (Гет) 17, дополнительную антенну (АНТд) 18, аппаратуру формирования опорного сигнала (АФос) 19.
Первый выход цифровой вычислительной системы РЛс 10 подключен ко входу радиопередающего устройства подсвета цели 9, второй выход цифровой вычислительной системы РЛс2 10 соединен со входом аппаратуры излучения и обработки импульсного сигнала 7, второй вход-выход цифровой вычислительной системы РЛс2 10 подключен ко второму входу-выходу системы автоматического сопровождения цели по направлению 11. Выход аппаратуры излучения и обработки импульсного сигнала 7 подключен к первому входу системы автоматического сопровождения цели по направлению 11, выход системы автоматического сопровождения цели по направлению 11 соединен с первым входом пеленгационной антенны 8, ко второму входу которой подключен выход радиопередающего устройства подсвета цели 9. Вход-выход пеленгационной антенны 8 соединен с входом-выходом аппаратуры излучения и обработки импульсного сигнала 7. Выход дополнительной антенны 18 соединен с первым входом аппаратуры формирования опорного сигнала 19, ко второму входу которого подключен второй выход гетеродина 17. Первый выход гетеродина 17 подключен к четвертому входу трехканального радиоприемного устройства непрерывного сигнала 13. Вход гетеродина 17 соединен с выходом аппаратуры приема-передачи данных 6, выход аппаратуры формирования опорного сигнала 19 подключен к первым входам первого 14, второго 15 и третьего 16 фазовых детекторов, ко второму входу которых подключены первый, второй и третий выходы трехканального радиоприемного устройства непрерывного сигнала 13. Выход пеленгационной антенны 8 подключен к входу волноводной суммарно-разностной системы 12, первый, второй и третий выходы которой соединены соответственно с первым, вторым и третьим входами трехканального радиоприемного устройства 13. Выходы первого 14, второго 15 и третьего 16 фазовых детекторов соединены со вторым, третьим и четвертым входами системы автоматического сопровождения цели по направлению 11.
Разнесенная радиолокационная система для обнаружения, сопровождения и подсвета целей в составе зенитного ракетного комплекса работает следующим образом.
После установки однопозиционных радиолокационных систем (РЛс) зенитного ракетного комплекса (ЗРК) на заданной позиции осуществляется взаимная координатная привязка всех средств комплекса относительно координат пункта боевого управления, т.е. по обмену соответствующими значениями X1, Y1, H1, X2, Y2, H2, Xпбу, Yпбy, Hпбу. После завершения процедуры взаимной координатной привязки средств ЗРК начинается процесс поиска и обнаружения целей в заданной области ответственности ЗРК.
Координаты обнаруженной цели (целей) передаются на ЦВС пункта боевого управления 2, который назначает конкретную, например первую однопозиционную радиолокационную систему для захвата, сопровождения и подсвета цели с целью осуществления ее обстрела. При отсутствии радиоэлектронного противодействия первой однопозиционной радиолокационной системе она работая в штатном режиме, т.е. как независимая радиолокационная система, осуществляет захват цели, сопровождение и подсвет ее для обстрела.
Основным недостатком независимых РЛс является резкое снижение основных тактико-технических характеристик (или показателей) в условиях постановки активных помех. Другими словами, показатель помехозащищенности, характеризующий постоянство эффективности РЛс при наличии помех в автономных режимах работы, существенно уменьшается.
В случае постановки противником активных помех для второй однопозиционной радиолокационной системы, которая сопровождала цель, пункт боевого управления образует разнесенную радиолокационную систему, назначая для захвата, сопровождения и подсвета первую однопозиционную радиолокационную систему, причем литерная частота радиопередающего устройства подсвета цели первой РЛc1 4 точно совпадает с литерной частотой второй РЛс2 5. Первая РЛс1 4 по целеуказанию с ПБУ 1 осуществляет захват, сопровождение и подсвет цели, а вторая РЛс2 5, будучи забитой помехой, выключает излучение.
В начальный момент работы АИОИС первой РЛc1 4 не подвержена воздействию активной помехи (хотя бы в течение времени, необходимого системе РЭП противника провести разведку появившихся новых излучающих средств и оценить приоритетность создания им помех) и информация о координатах обнаруженной и сопровождаемой цели сразу же с использованием аппаратуры приема-передачи данных передается на вторую РЛc2 5, которая в «пассивном режиме», т.е. не включая передающих устройств, ни аппаратуры излучения и обработки импульсного сигнала, ни подсвета цели, осуществляет захват цели на частоте подсвета от первой РЛс1 4. В свою очередь, непосредственно после захвата сигнала цели второй РЛс2 5 во избежание сброса цели с сопровождения первой РЛc1 4 в случае постановки в ее направлении активных помех, информация о сопровождаемой цели со второй РЛс2 5 передается на первую РЛc1 4 для организации режима «принудительного сопровождения» ее по сигналам управления со второй РЛс2 5.
Известно, что для пеленгации в двух плоскостях необходимо иметь четыре луча (Справочник по радиолокации. Под редакцией М. Сколник. Том 4. Радиолокационные станции и системы. М.: «Сов. Радио», 1978 г., стр.18). Такую систему можно построить с помощью например 4-х облучателей, смещенных симметрично в азимутальном и угломестном направлениях относительно фокальной оси зеркала (Финкельштейн М.И. Основы радиолокации. М.: «Сов. Радио», 1973 г., стр.401). В результате на выходе такой системы с помощью 4-х волновых мостов образуется суммарный и два разностных сигнала - в азимутальной и угломестной плоскостях, которые подаются на соответствующие входы трехканального приемного устройства. С этого момента независимо от факта постановки активной помехи в направлении PЛc1 4 разнесенной радиолокационной системы, РЛс2 5 в пассивном режиме продолжает сопровождение цели. При этом режиме сопровождение цели РЛс2 5 обеспечивается следующим образом. Сигнал, отраженный от цели, принимается пеленгационной антенной 8, с выхода которой поступает через ВСРС 12 на вход трехканального радиоприемного устройства сигнала цели 13.
На второй вход РПУнс 13 поступает сигнал гетеродина в диапазоне радиопередающего устройства 9. С выхода трехканального РПУнс 13 преобразованный и усиленный сигнал цели Рсц, имеющий доплеровское смещение частоты Fд, определяемый значением относительной скорости цели, поступает на вторые входы фазовых детекторов 14, 15, 16, на первые входы которых поступает опорный сигнал Рос с выхода аппаратуры формирования опорного сигнала (АФос) 19, при этом первый вход АФос 19 соединен с выходом дополнительной антенны 18, принимающей боковое излучение РЛc1 на частоте подсвета цели, второй вход АФос 19 соединен со вторым выходом гетеродина 17. С выходов фазовых детекторов 14, 15, 16 сигналы доплеровской частоты поступают на соответствующие входы системы автоматического сопровождения цели по направлению (АСН) 11, осуществляющей управление пеленгационной антенной (АНТп) 8 по угловым координатам. Одновременно управляющие сигналы для управления пеленгационной антенной через второй вход-выход поступают на ЦВС РЛс2 10, где по одному из правил для однобазовой разнесенной радиолокационной системы вычисляются текущие значения угловых координат цели относительно первой радиолокационной системы РЛс1 4 (см. Кондратьев B.C., Котов А.Ф., Марков А.Н. Многопозиционные радиотехнические системы. Под редакцией профессора В.В. Цветнова. М., Радио и связь, 1986 г., стр.212-215) и далее через АПД РЛс2 6 и АПД ПБУ 3 поступают на РЛс1 4 для соответствующего управления пеленгационной антенной РЛс1 4.
РЛс1, перейдя в режим управления своей пеленгационной антенны по угловым координатам от РЛс2 5, продолжает осуществлять излучение радиопередающим устройством подсвета цели 9, обеспечивая работу в пассивном режиме РЛс2 5.
С целью коррекции текущих угловых координат сопровождаемой цели и устранения угловых ошибок визирования цели при сопровождении последней в пассивном режиме на частоте РПДУп подсвета одной из РЛc целесообразно периодически осуществлять измерения текущего значения дальности до цели Дц относительно РЛс1 4 или РЛс2 5 с помощью АИОИС соответствующей радиолокационной системы, так как АИОИС имеют лучшие точности по сопровождению, чем радиолокационные системы с непрерывным излучением (см. Перунов Ю.М., Фомичев К.И., Юдин Л.М. Радиоэлектронное подавление информационных каналов систем управления оружием. М., Радиотехника, 2003, стр.200).
Определение текущего значения Дц1 или Дц2 осуществляется при кратковременном включении одной из АИОИС радиолокационных станций с осуществлением захвата и сопровождения цели по дальности. Измеренное значение дальности до цели Дц, а также известное значение базы системы с измеренным значением текущего угла между ними позволяют по одному из правил для косоугольного треугольника определить или уточнить остальные параметры координат цели относительно РЛc1 4 или РЛс2 5, обеспечив тем самым для ПБУ 1 выбор «стреляющей» системы. При этом каждое очередное включение излучения АИОИС может осуществляться на новой несущей частоте, периодичность включения излучения в зависимости от параметров движения цели и параметров пеленгационных антенн может составлять несколько секунд.
Кроме устранения или уменьшения текущих ошибок визирования цели относительно РЛc1 4 или РЛс2 5 кратковременное включение АИОИС будет существенно усложнять работу систем РТР и РЭП в процессе радиолокационного конфликта.
Показатель эффективности повышения помехозащищенности предлагаемой разнесенной радиолокационной системы оценим путем сравнения значений коэффициентов подавления  для разнесенной системы и
для разнесенной системы и  для PЛc1 4 или РЛс2 5 при работе последних в штатных или «совмещенных» режимах. При этом для упрощения соотношений для определения соответствующих αп можно считать коэффициент, учитывающий потери сигнала помехи из-за различия поляризационных характеристик антенн передатчика помех и подавляемой РЛс, равным единице. Кроме этого, можно из общих соотношений для определения αп исключить коэффициент, учитывающий затухание сигналов в атмосфере, и коэффициент, учитывающий влияние подстилающей поверхности.
для PЛc1 4 или РЛс2 5 при работе последних в штатных или «совмещенных» режимах. При этом для упрощения соотношений для определения соответствующих αп можно считать коэффициент, учитывающий потери сигнала помехи из-за различия поляризационных характеристик антенн передатчика помех и подавляемой РЛс, равным единице. Кроме этого, можно из общих соотношений для определения αп исключить коэффициент, учитывающий затухание сигналов в атмосфере, и коэффициент, учитывающий влияние подстилающей поверхности.
Тогда в случае постановки помех внешнего прикрытия можно записать для мощности радиолокационного сигнала, отраженного от цели  и уровня сигнала помехи на входе приемника радиолокационной станции
и уровня сигнала помехи на входе приемника радиолокационной станции  следующие соотношения (см. Перунов Ю.М., Фомичев К.И., Юдин Л.М. Радиоэлектронное подавление информационных каналов систем управления оружием. М., Радиотехника, 2003 г., стр.46):
следующие соотношения (см. Перунов Ю.М., Фомичев К.И., Юдин Л.М. Радиоэлектронное подавление информационных каналов систем управления оружием. М., Радиотехника, 2003 г., стр.46):


где Ррлс - мощность передатчика РЛс2;
Gрлс·Gпр - коэффициент усиления соответственно передающей и приемной антенн РЛс2 в направлении на цель; в этом случае можно считать Gрлс≈Gпр;
σц эквивалентная поверхность рассеяния цели;
 - удаление цели от РЛс2;
- удаление цели от РЛс2;
Рnх - мощность передатчика помех;
Gnx - коэффициент усиления передающей антенны постановщика помех в направлении на РЛс2;
Gпp(θ) - коэффициент усиления приемной антенны РЛс2 в направлении на постановщик помех;
 - удаление постановщика помех от РЛс2;
- удаление постановщика помех от РЛс2;
λ - длина волны.
Учитывая однотипность входящих в комплекс РЛс аналогичные соотношения имеем и для  и
и  .
.
С учетом соотношений (1) и (2) для  имеем:
имеем:

В случае организации разнесенной радиолокационной системы, в которой, например, РЛс2 сопровождает цель в пассивном режиме (без излучения), а РЛс1 с излучением в направлении цели (или в общем случае сопровождая ее), для  и
и  имеем
имеем


где Gnx(θ) - коэффициент усиления антенны постановщика помех побоковым лепесткам, соответствующим направлению на РЛс2 при направлении главного луча на РЛс1;
 - удаление цели от РЛс1;
- удаление цели от РЛс1;
С учетом соотношений (4) и (5) для  имеем
имеем

Сравнивая полученные значения для коэффициентов подавления  и
и  , получаем
, получаем

Различия между  и
и  определяются текущим положением цели и параметрами треугольника, в котором величина базы Б, а также ее пространственное положение являются известными. Так как обычно для разнесенных радиолокационных систем в составе мобильных ЗРК величина базы не превышает 20÷25 км, то и разница между значениями
определяются текущим положением цели и параметрами треугольника, в котором величина базы Б, а также ее пространственное положение являются известными. Так как обычно для разнесенных радиолокационных систем в составе мобильных ЗРК величина базы не превышает 20÷25 км, то и разница между значениями  и
и  будет также не слишком существенной, практически она всегда будет меньше величины значения базы. Следовательно, диапазон значений отношения
будет также не слишком существенной, практически она всегда будет меньше величины значения базы. Следовательно, диапазон значений отношения  может лежать от нескольких десятых до 2…3 единиц.
может лежать от нескольких десятых до 2…3 единиц.
Отношение Gnx/Gnx (θ) характеризует относительный уровень боковых лепестков передающей антенны постановщика помех в направлении РЛс2, работающей в пассивном режиме. Следовательно, с учетом того, что при подавлении радиолокационной системы ЗРК отношение Gnx/Gnx (θ) обычно составляет не менее 20…25 дБ для второго-третьего боковых лепестков диаграммы направленности антенны, величина коэффициента подавления  также уменьшится на указанное значение по сравнению с величиной коэффициента подавления
также уменьшится на указанное значение по сравнению с величиной коэффициента подавления  , т.е. на 20÷25 дБ.
, т.е. на 20÷25 дБ.
Таким образом, введение новых устройств в состав радиолокационных систем мобильного зенитного ракетного комплекса и новых связей для обеспечения функционирования этих вновь введенных устройств позволит организовать разнесенную радиолокационную систему в пассивном режиме работы (без излучения) одной радиолокационной системы и с принудительным управлением по направлению пеленгационной антенны и излучением второй, что позволило в условиях постановки активных помех уменьшить коэффициент подавления радиолокационной системы, работающей в режиме сопровождения цели и принудительного управления работой второй радиолокационной системы на 20…25 дБ.
К дополнительным преимуществам предлагаемого технического решения относятся следующие возможности:
• гибкая адаптация по выбору конкретных радиолокационных систем для работы в пассивном и активном режимах в зависимости от текущего расположения цели, постановщика помех и средств комплекса;
• организация периодической смены функций при работе в активном или пассивном режимах с целью сокращения продолжительности излучения конкретной радиолокационной системой комплекса и, как следствие, повышение вероятности не поражения ее противорадиолокационным оружием.
| название | год | авторы | номер документа |
|---|---|---|---|
| Многофункциональная РЛС самоходной огневой установки зенитного ракетного комплекса средней дальности действия | 2019 |
|
RU2714993C1 |
| ОГНЕВАЯ СЕКЦИЯ | 2003 |
|
RU2253821C1 |
| САМОХОДНАЯ ОГНЕВАЯ УСТАНОВКА ОБНАРУЖЕНИЯ, СОПРОВОЖДЕНИЯ И ПОДСВЕТА ЦЕЛЕЙ, НАВЕДЕНИЯ И ПУСКА РАКЕТ ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА СРЕДНЕЙ ДАЛЬНОСТИ | 2007 |
|
RU2333450C1 |
| СИСТЕМА ВСТРОЕННОГО КОНТРОЛЯ И КАЛИБРОВКИ МОНОИМПУЛЬСНОЙ РЛС | 2011 |
|
RU2459219C1 |
| ЗЕНИТНАЯ ПУШЕЧНО-РАКЕТНАЯ БОЕВАЯ МАШИНА | 2000 |
|
RU2191973C2 |
| Способ и система многоцелевого сопровождения в двухпозиционных радиолокационных системах | 2018 |
|
RU2716495C1 |
| Способ распознавания ложных (имитирующих) целей в многопозиционной радиолокационной станции с широкополосным зондирующим сигналом | 2020 |
|
RU2755993C1 |
| МНОГОФУНКЦИОНАЛЬНАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ОБНАРУЖЕНИЯ ЦЕЛЕЙ, ПОДСВЕТА СОПРОВОЖДАЕМЫХ ЦЕЛЕЙ И НАВЕДЕНИЯ РАКЕТ ЗЕНИТНО-РАКЕТНОГО КОМПЛЕКСА СРЕДНЕЙ ДАЛЬНОСТИ ДЕЙСТВИЯ | 2007 |
|
RU2343394C1 |
| СПОСОБ РАДИОЛОКАЦИОННОГО ОБЗОРА ПРОСТРАНСТВА И РАДИОЛОКАЦИОННЫЙ КОМПЛЕКС ДЛЯ РЕАЛИЗАЦИИ СПОСОБА (ВАРИАНТЫ) | 2011 |
|
RU2471201C2 |
| СПОСОБ КОМПЛЕКСНОГО ВЕДЕНИЯ РАДИОЛОКАЦИОННОЙ РАЗВЕДКИ СРЕДСТВАМИ АКТИВНОЙ, ПАССИВНОЙ И АКТИВНО-ПАССИВНОЙ ЛОКАЦИИ В ЕДИНОМ РАДИОЛОКАЦИОННОМ ПОЛЕ | 2024 |
|
RU2831131C1 |
Изобретение относится к области оборонной техники, в частности к мобильным зенитным ракетным комплексам (ЗРК). Технический результат - повышение помехоустойчивости. Разнесенная радиолокационная система для обнаружения, сопровождения и подсвета целей состоит из цифровой вычислительной системы пункта боевого управления, вход-выход которой соединен шиной через аппаратуру приема-передачи данных пункта боевого управления с двумя входами-выходами двух однопозиционных радиолокационных систем. Каждая однопозиционная радиолокационная система содержит аппаратуру приема-передачи данных, цифровую вычислительную систему, аппаратуру излучения и обработки импульсного сигнала, пеленгационную антенну, радиопередающее устройство подсвета цели и систему автоматического сопровождения цели по направлению. Для уменьшения коэффициента подавления активной помехой радиолокационных систем в каждую однопозиционную систему введены волноводная суммарно-разностная система, трехканальное радиоприемное устройство непрерывного сигнала, первый, второй и третий фазовые детекторы, гетеродин, аппаратура формирования опорного сигнала и дополнительная антенна. 1 ил.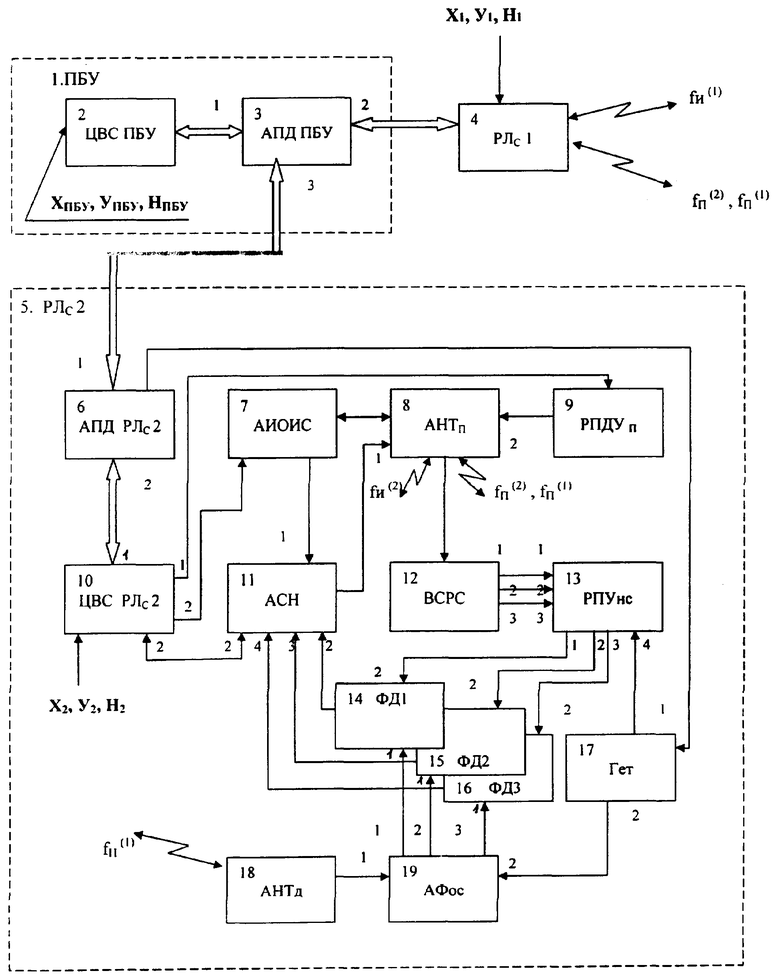
Разнесенная радиолокационная система для обнаружения, сопровождения и подсвета целей, содержащая цифровую вычислительную систему пункта боевого управления, вход-выход которой соединен шиной через аппаратуру приема-передачи данных пункта боевого управления с двумя однопозиционными радиолокационными системами, каждая из которых содержит аппаратуру приема-передачи данных, цифровую вычислительную систему, аппаратуру излучения и обработки импульсного сигнала, пеленгационную антенну, радиопередающее устройство подсвета цели и систему автоматического сопровождения цели по направлению, при этом второй вход-выход аппаратуры приема-передачи данных однопозиционной радиолокационной системы соединен шиной с первым входом-выходом цифровой вычислительной системой однопозиционной радиолокационной системы, а первый выход цифровой вычислительной системы подключен к входу радиопередающего устройства подсвета цели, второй выход цифровой вычислительной системы однопозиционной радиолокационной системы соединен с входом аппаратуры излучения и обработки импульсного сигнала, а второй вход-выход цифровой вычислительной системы подключен ко второму входу-выходу системы автоматического сопровождения цели по направлению, выход аппаратуры излучения и обработки импульсного сигнала подключен к первому входу системы автоматического сопровождения цели по направлению, выход системы автоматического сопровождения цели по направлению соединен с первым входом пеленгационной антенны, ко второму входу которой подключен выход радиопередающего устройства подсвета цели, вход-выход пеленгационной антенны соединен с входом-выходом аппаратуры излучения и обработки импульсного сигнала, причем второй вход-выход аппаратуры приема-передачи данных пункта боевого управления соединен шиной с входом-выходом первой однопозиционной радиолокационной системы, а третий вход-выход аппаратуры приема-передачи данных пункта боевого управления соединен шиной с первым входом-выходом аппаратуры приема-передачи данных второй однопозиционной радиолокационной системы, отличающаяся тем, что в каждую однопозиционную радиолокационную систему введены волноводная суммарно-разностная система, трехканальное радиоприемное устройство непрерывного сигнала, первый, второй и третий фазовые детекторы, гетеродин, аппаратура формирования опорного сигнала и дополнительная антенна, выход дополнительной антенны соединен с первым входом аппаратуры формирования опорного сигнала, ко второму входу которого подключен второй выход гетеродина, первый выход гетеродина подключен к четвертому входу трехканального радиоприемного устройства непрерывного сигнала, вход гетеродина соединен с выходом аппаратуры приема-передачи данных, выходы аппаратуры формирования опорного сигнала подключены к первым входам первого, второго и третьего фазовых детекторов, ко второму входу которых подключены первый, второй и третий выходы трехканального радиоприемного устройства непрерывного сигнала, выход пеленгационной антенны подключен к входу волноводной суммарно-разностной системы, первый, второй и третий выходы которой соединены соответственно с первым, вторым и третьим входами трехканального радиоприемного устройства, выходы первого, второго и третьего фазовых детекторов соединены со вторым, третьим и четвертым входами системы автоматического сопровождения цели по направлению.
| ЗЕНИТНЫЙ РАКЕТНО-ПУШЕЧНЫЙ КОМПЛЕКС | 1998 |
|
RU2131577C1 |
| ЗЕНИТНАЯ САМОХОДНАЯ УСТАНОВКА | 1998 |
|
RU2135924C1 |
| ОГНЕВАЯ СЕКЦИЯ | 2003 |
|
RU2229668C1 |
| US 5042743 A, 27.08.1991 | |||
| US 5197691 A, 30.03.1993. | |||

