Область техники
Данное техническое решение относится к области компьютерной технологии в военном деле, а именно к организации системы огня зенитных соединений и частей войсковой противовоздушной обороны (ПВО) в части построения интегральной зоны поражения группировки огневых средств (ОС).
Уровень техники
В настоящее время в новых и модернизируемых автоматизированных системах управления войсками и огнем расширяется перечень автоматизируемых функций, уменьшается работное время по цели. Однако, как отмечается (Л1), управление огнем продолжает отставать от текущих требований, и центральным вопросом становиться эффективность управления огнем. Сущность заключается в нарастающем противоречии между уровнем боевого потенциала группировки ОС и способностью человека (командира) реализовать этот потенциал в ходе боя для выполнения поставленной задачи в соответствии со сложившейся обстановкой.
Большие трудности в управлении огнем возникают при отражении массированных налетов. Как приведено в (Л2), при плотностях налетов более двух-трех самолетов в минуту неавтоматизированное управление зенитными ракетными дивизионами группировки становится неэффективным.
Основными средствами в структуре современной ПВО для организации отражения средств воздушного нападения (СВН) являются мобильные зенитные ракетные комплексы (ЗРК). Аналогом заявляемого технического решения является изобретение по патенту 2253820 (Л3) «Мобильный зенитный ракетный комплекс» для обнаружения и поражения аэродинамических, баллистических целей и крылатых ракет в составе последовательно соединенных станции обнаружения целей, пункта боевого управления, содержащего аппаратуру приема-передачи данных, второй выход которой соединен с цифровой вычислительной системой пункта боевого управления, установки с радиолокатором подсвета и наведения, пусковой установки, содержащей последовательно соединенные аппаратуру приема-передачи данных, цифровую вычислительную систему пусковой установки, поворотную пусковую установку, зенитные управляемые ракеты с полуактивным или активным методами наведения, при этом третий вход цифровой вычислительной системы пусковой установки соединен с выходом системы навигации, топопривязки и ориентирования, отличающийся тем, что дополнительно введен воздушный носитель с радиолокатором подсвета и наведения, содержащий последовательно соединенные многофункциональную радиолокационную станцию, цифровую вычислительную систему и аппаратуру приема-передачи данных воздушного носителя, при этом выход аппаратуры приема-передачи данных воздушного носителя соединен со входом аппаратуры приема-передачи данных пункта боевого управления, а второй вход цифровой вычислительной системы воздушного носителя соединен с выходом навигационного процессора, первый вход которого соединен с выходом приемного устройства обработки радионавигационных сигналов, а второй вход соединен с выходом инерциальной системы, и в состав пункта боевого управления введены последовательно соединенные приемное устройство обработки радионавигационных сигналов и навигационный процессор пункта боевого управления, выход которого соединен со вторым входом цифровой вычислительной системы пункта боевого управления.
Для повышения эффективности отражения налета СВН предлагается кроме радиолокационной станции обнаружения целей дополнительно использовать радиолокатор подсвета и наведения на воздушном носителе с целью увеличения дальней границы обнаружения целей. Это приводит к более раннему обнаружению целей, повышает точность определения координат целей, но не снимает задачу распределения усилий по целям между подразделениями ЗРК.
Другим аналогом может служить изобретение по патенту 2131577 (Л4) «Зенитный ракетно-пушечный комплекс», включающий в себя башню с приводом наведения и размещенные на ней радиолокационную станцию обнаружения цели, радиолокационную станцию сопровождения цели и ракеты (ССЦР), содержащую приводы наведения, блоки выделения координат цели и ракеты, пусковые установки с зенитными управляемыми ракетами (ЗУР), зенитными автоматами и приводом наведения по углу места, вычислительную систему, содержащую блок выдачи целеуказания по угловым координатам и дальности для нескольких целей, блок вычисления зонных параметров, блок выработки команд управления ЗУР, блок выработки углов отворота пусковых установок и башни, пульт пуска, отличающийся тем, что в состав комплекса введена и размещена на башне оптико-электронная система (ОЭС), содержащая тепловизионный прибор с телеавтоматом, инфракрасный (ИК) пеленгатор, антенну с передатчиком команд ЗУР и приводы наведения ОЭС по углу места и азимуту с датчиками углов, а в вычислительную систему введены второй блок вычисления зонных параметров, второй блок выработки команд управления ЗУР и логическое устройство, содержащее схему разности, схему сравнения, две схемы задержки, три схемы И, четыре схемы ИЛИ, три пороговых устройства, два ключа, два переключателя и регистры памяти кодов адресов ЗУР, при этом выходы телеавтомата соединены одновременно с первыми входами второго блока выработки команд управления, первыми входами второго блока вычисления зонных параметров и входами приводов ОЭС, датчики которых подключены ко вторым входам второго блока вычисления зонных параметров и вторым управляемым входам первого переключателя, первые управляемые входы которого подключены к выходам блока выделения координат цели ССЦР по углам, а третий вход второго блока вычисления зонных параметров соединен с выходом блока выдачи целеуказания по дальности для второй цели, причем выходы блока выдачи целеуказания по угловым координатам для второй цели подключены на входы телеавтомата, при этом сигнальные выходы ИК-пеленгатора соединены со вторыми входами второго блока выработки команд управления ЗУР, выход которого подключен на вход передатчика команд ОЭС, причем первые выходы блоков вычисления зонных параметров через схему разности и пороговое устройство соединены с первым входом первой схемы ИЛИ, выход которой подключен к первому входу второй схемы ИЛИ, а вторые выходы блоков вычисления зонных параметров через схему сравнения соединены со вторым входом первой схемы ИЛИ и через пороговые устройства, ключи, вторые входы первой и второй схем И, четвертую схему ИЛИ подключены к третьему входу третьей схемы И, первый вход которой соединен через вторую схему задержки с первым выходом пульта пуска, который одновременно подключен к первым входам первой и второй схем И, а второй вход третьей схемы И через первую схему задержки и третью схему ИЛИ соединен с логическими выходами блока выделения координат ЗУР ССЦР и ИК-пеленгатора, которые одновременно подключены к управляющим входам соответствующих ключей, при этом выход третьей схемы И соединен с первым входом пульта пуска и вторым входом второй схемы ИЛИ, выход которой подключен к управляющим входам переключателей, причем выходы первого переключателя соединены со входами блока выработки углов отворота пусковых установок и башни, а выходы регистров памяти кодов адресов ракеты подключены к управляемым входам второго переключателя, выход которого через второй вход пульта пуска соединен с зенитной управляемой ракетой в момент ее пуска
В данном аналоге предлагается для повышения эффективности отражения массированного налета кроме станции обнаружения целей и станции сопровождения цели и ракеты (ССЦР) использовать оптико-электронную систему (ОЭС), что позволяет одновременно выполнять работу по двум целям с сохранением времени реакции комплекса. Работа может выполняться в автоматическом режиме, для чего предлагается использовать блоки вычисления зонных параметров: времен до входа целей в зону поражения и времен нахождения целей в зоне поражения, определяемых по координатам цели сопровождаемой ССЦР, и координатам цели, сопровождаемой ОЭС. Техническим результатом изобретения является повышение эффективности комплекса за счет расширения функциональных возможностей, но эти возможности ориентированы на автономную работу комплекса.
Метод построения интегральной зоны поражения, предлагаемый в настоящем предлагаемом изобретении, является по сути реализацией возможности использовать временные характеристики целей относительно зоны поражения для автоматизации работы по целям на уровне совокупности ОС.
Наиболее близким аналогом (прототипом) заявляемого технического решения является «Подсистема представления информации о характеристиках радиотехнической системы, зависящих от свойств рельефа местности» (Л5) (патент на изобретение RU №2087001 С1, заявка 94018673 от 24.05.1994 г., МПК G01S 7/40, опубл. 10.08.1997 г.), содержащая вычислитель, блок управления, накопитель на магнитной ленте, индикатор, причем первый и второй выходы накопителя на магнитной ленте соединены с соответствующими входами вычислителя, первый, второй, третий выходы вычислителя соединены с соответствующими входами блока управления, первый, второй, третий выходы блока управления соединены с соответствующими входами индикатора, отличающаяся тем, что введены пульт управления и блок индексных регистров, причем входы устройства с первого по четвертый являются входами с четвертого по седьмой блока управления соответственно, первый выход вычислителя соединен с третьим входом блока индексных регистров, первый, второй, третий выходы блока индексных регистров соединены с четвертым, пятым и шестым входами вычислителя соответственно, первый и второй выходы пульта управления соединены с соответствующими входами блока индексных регистров, второй и третий выходы пульта управления соединены с седьмым и третьим входами вычислителя соответственно.
В предлагаемом прототипе для оценки эффективности системы огня и для определения параметров боевого управления в АСУ соединений и частей используются зоны поражения ОС, входящих в состав соединений и частей и предлагается для представления зон поражения ОС обеспечить возможности отображения на индикаторах рабочих мест операторов зоны поражения на плоскости. Такое представление зон ориентировано на ручное распределение целей и не обеспечивает достаточную производительность и эффективность для отражения массированных налетов.
На рисунке (фиг.1) заявки показан пример сценария массированного налета с указанием зоны поражения на плоскости отдельных ОС группировки (батареи). Интегральная зона поражения образуется путем слияния локальных зон поражения ОС в составе группировки. Интегральная зона поражения позволяет рассматривать группировку средств ПВО как одно многоканальное огневое средство, что упрощает управление в АСУ на уровне группировки в части отбора целей, по которым на текущий момент времени может быть поставлена задача для ОС в составе группировки.
Отбор целей заключается в поиске для группировки ОС претендентов на обстрел из числа сопровождаемых целей. Одним из основных условий отбора является прогноз наличия цели в зоне поражения группировки ОС и возможность поражения целей по временным параметрам, то есть достаточности времени от текущего момента времени до встречи поражающих элементов ОС с целью в интегральной зоне поражения.
Для выполнения отбора в автоматическом режиме требуется аналитическое представление зоны поражения группировки ОС. Основные требования к аналитическому представлению зоны поражения следующие. Зона должна быть пространственной. Пространственная зона должна быть оптимальной относительно области, образованной слиянием всех локальных зон ОС. Построение зоны должно обеспечивать быструю перестройку зоны при изменении координат точек расположения ОС или при изменении их состояния. Быстрым должен быть алгоритм вычисления подлетного времени цели к зоне и времени нахождения цели в зоне. Способ построения зоны с такими характеристиками приведен ниже.
Сущность изобретения
Известен способ построения интегральной зоны поражения группировки огневых средств (ОС), реализуемый с использованием текущих параметров локальных зон поражения ОС, входящих в состав группировки, и использующий эти данные для обработки с помощью средств вычислительной техники.
Целью создания предлагаемого изобретения является решение актуальной задачи создания системы огня войсковой ПВО в части построения интегральной зоны поражения группировки огневых средств (ОС) для повышения эффективности отбора целей на уровне соединений и частей войсковой ПВО при отражении массированных налетов.
Для решения этой задачи предлагается нижеприведенный алгоритм обработки данных локальных зон поражения ОС в составе группировки с использованием следующих исходных данных:
Pk(xk, yk, hk) - точка стояния ОС,
rk - максимальная дальность поражения ОС,
и последовательных шагов:
шаг 1 - по значениям rk и точкам стояния Pk определяются границы прямоугольной области, охватывающей все локальные зоны ОС:
верхняя граница прямоугольной области х2 определяется путем сложения xk и rk для каждого ОС группировки и выбора максимального значения из всех полученных, аналогично определяется нижняя граница x1, левая граница y1 и правая граница у2;
шаг 2 - по значениям rk и точкам стояния Pk в пределах границ прямоугольной области определяются значения массива отрезков линий Pi1Pi2 с точками Pi1(xi, yi1) и Pi2(xi, yi2):
в границах прямоугольной области проводятся линии, параллельные оси у, от значения x1 до значения x2 с шагом по х, определенным по локальной зоне с минимальным rk,
для каждой линии xi определяется минимальное значение yi1
и максимальное значение yi2

где Q=rk 2-(xi-xk)2,
после просмотра всех зон ОС группировки для yi1 выбирается минимальное найденное значение, а для yi2 максимальное;
шаг 3 - по значениям rk и точкам стояния Pk в пределах границ прямоугольной области определяются значения массива отрезков линий Pj1Pj2 с точками Pj1(yj, xj1) и Pj2(yj, xj2):
в границах прямоугольной области проводятся линии, параллельные оси х, от значения y1 до значения у2 с шагом по у, определенным по локальной зоне с минимальным rk,
для каждой линии yj определяется минимальное значение xj1
и максимальное значение xj2
где Q=rk 2-(yj-yk)2,
после просмотра всех зон ОС группировки для xj1 выбирается минимальное найденное значение, а для xj2 максимальное;
шаг 4 - определяются угловые коэффициенты диаметров для хорд Х и для хорд У:
угловой коэффициент диаметра хорд X
kx=Sy/Sx,
где 
n - количество Х хорд;
угловой коэффициент диаметра хорд У
ky=Sx/Sy,
где 

m - количество У хорд;
шаг 5 - определяется угол β отклонения полуоси а эллипса от оси х
β=0.5 arctg(A),
где 
шаг 6 - определяется коэффициент сжатия ks
если угол β не равен нулю,
k2 s=a2/b2=tg(β)/tg(β-arctg(kx)),
если угол β равен нулю,
ks=(х2-x1)/(у2-у1);
шаг 7 - определяются величины полуосей а и b


\\\где n - количество хорд;
xmi1, ymil, xmi2, ymi2 - координаты точек Pi1 и Pi2, переведенные в местную систему координат эллипса с учетом смещения местной системы координат в точку PS(xS, yS) и поворота на угол β
xmi1=(xi-xS)cos(β)+(yi1-yS)sin(β),
ymil=-(xi-xS)sin(β)+(yi1-yS)cos(β),
xmi2=(xi-xS)cos(β)+(yi2-yS)sin(β),
ymi2=-(xi-xS)sin(β)+(yi2-yS)cos(β),
шаг 8 - определяются выходные данные - параметры эллипсоида, охватывающего локальные зоны поражения:
P(xS, yS, hS) - начальная точка местной системы координат,
а, b, с - полуоси эллипсоида,
β - угол поворота местной системы координат,
hmax - ограничение зоны по высоте,
где hS - высота начальной точки местной системы координат, равная высоте точки стояния hk того ОС, который имеет минимальное значение.
Значение полуоси эллипсоида с в направлении оси hm принимается равным значению высоты, которая получается путем сложения максимального значения hk для ОС в составе группировки со значением полуоси а или b, которая имеет большее значение.
Ограничение зоны по высоте hmax принимается равным ограничению по высоте локальной зоны поражения того ОС, для которого сумма значения высоты точки стояния hk и ограничения по высоте цели, определенное в ТТХ на ОС, имеет большее значение.
В рассматриваемом методе по параметрам зон поражения локальных ОС, входящих в состав соединений и частей, определяются параметры пространственной интегральной зоны поражения группировки ОС, что упрощает определение пространственных и временных характеристик цели относительно зоны и повышает оперативность принятия решений отбора целей на уровне подразделений.
Получаемая интегральная зона позволяет определить прохождение траектории цели через зону, определить время входа цели в зону и время вылета цели из зоны, позволяет выполнить отбор цели своевременно, то есть обеспечить возможность поражения цели на границе зоны поражения, позволяет выполнить отбор с учетом ограничений работы по цели по высоте и параметру.
Перечень чертежей
На фиг.1 показан пример сценария массированного налета.
На фиг.2 показаны элементы построения эллипс-зоны.
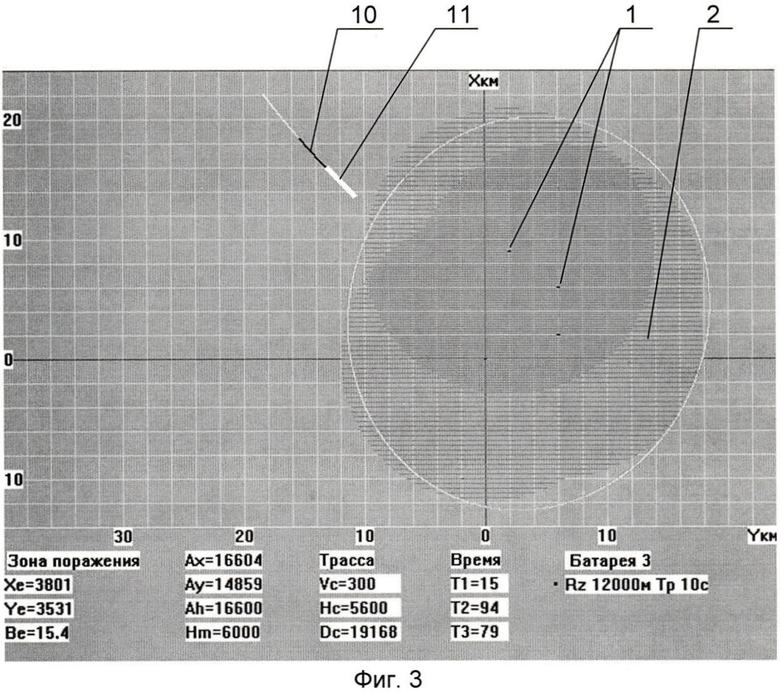
На фиг.3 показано приближение цели к зоне поражения батареи.
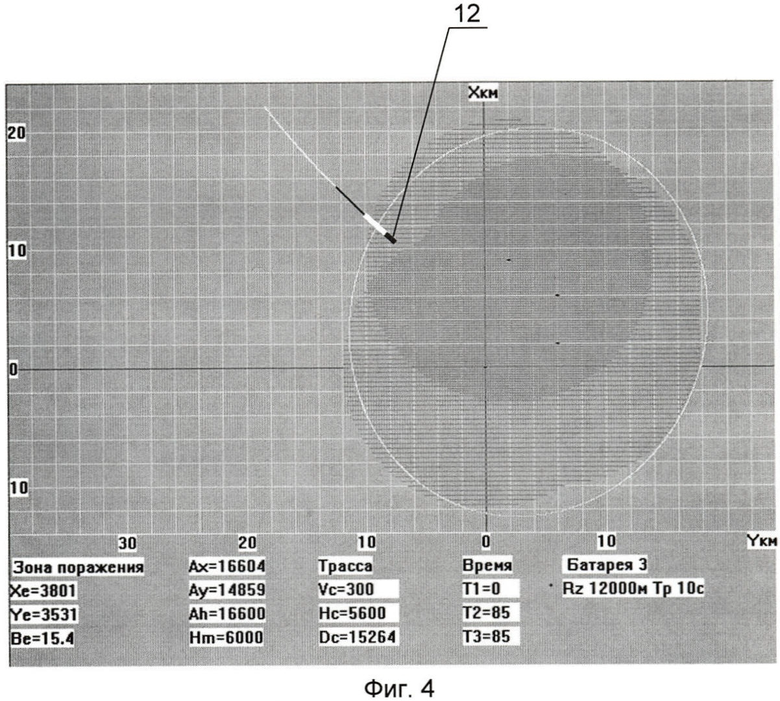
На фиг.4 показан момент входа цели в зону поражения батареи.
На фиг.5 показаны характеристики цели в зоне поражения батареи.
На фиг.6 показан выход цели из зоны поражения батареи.
Пример варианта реализации заявляемого способа
На фиг.1-6 обозначены: 1 - точки стояния огневых средств, 2 - зоны поражения на плоскости отдельных огневых средств группировки (батареи), 3 - текущие точки цели, 4 - экстраполированная горизонтальная траектория цели, 5 - траектория над зоной поражения, 6 - хорды X, 7 - диаметр, соответствующий хордам X, 8 - диаметр, соответствующий хордам У, 9 -направление оси xm местной системы координат, 10 - текущий отрезок траектории, 11 - упрежденный участок траектории, 12 - часть упрежденного участка траектории.
Термин «группировка», используемый в данном тексте, относится к группе ОС, выбранной для построения интегральной зоны не по административной подчиненности, а с учетом пространственного размещения ОС. В группировку могу быть включены все ОС батареи, несколько батарей, часть ОС батареи, то есть все те ОС, зоны поражения которых перекрываются или касаются.
На фиг.1 показан сценарий массированного налета, где указаны точки стояния ОС 1 (точки), зоны поражения на плоскости отдельных ОС группировки (батареи) 2 (синие линии), текущие точки цели 3 (крестики), экстраполированная горизонтальная траектория цели 4, траектория над зоной поражения 5 (красный участок траектории цели).
Интегральная зона поражения образуется путем слияния локальных зон поражения ОС в составе группировки.
Входными данными для построения интегральной зоны являются локальные зоны поражения ОС группировки. Зоны поражения ОС определяются в прямоугольной системе координат Oxyh. Ось х направлена на Север, ось у повернута на 90 градусов от оси х, ось h направлена вертикально вверх. Каждая зона поражения ОС группировки задается текущей точкой стояния Pk(xk, yk, hk) и максимальной дальностью поражения rk. Максимальная дальностью поражения определяется ТТХ ОС.
Интегральная зона поражения группировки ОС определяется в местной системе координат Oxmymhm. Местная система координат задается начальной точкой системы координат PS(xS, yS, hS) и углом β поворота оси xm местной системы координат относительно оси х.
Построение начинается с определения границ прямоугольной области, охватывающей все локальные зоны поражения на плоскости Оху. В границах прямоугольной области проводятся линии, параллельные оси у, с определенным шагом по х. Шаг определяется заданной точностью вычислений и выбирается таким, чтобы минимальную по площади локальную зону пересекали не менее десяти линий.
Для каждой линии xi определяется минимальное значение yi1 и максимальное значение yi2 пересечения линии с границей локальной зоны для всех локальных зон. Полученный массив отрезков Pi1Pi2 с точками Pi1(xi, yi1) и Pi2(xi, yi2) считаем хордами некоторого эллипса, массивом хорд X.
Для хорд Х определяется диаметр - линия, делящая все хорды пополам. Для эллипса это будет точное деление всех хорд пополам, а для произвольной области хорды в среднем будут поделены пополам.
Для эллипса имеется следующее свойство: произведение углового коэффициента хорд и углового коэффициента его диаметра всегда постоянно (Л6). Эта связь между угловыми коэффициентами хорд и их диаметра позволяет определить ориентацию эллипса на плоскости Оху. Если дополнительно построить массив хорд У по линиям, параллельным оси х, и определить диаметр для хорд У, то угол поворота местной системы координат определяется совместным решением двух выражений для произведений угловых коэффициентов.
На фиг.2 показан пример батареи в составе шести ОС. Локальные зоны поражения ОС на плоскости Оху образуют область, показанную на этом чертеже линией периметра. Линии 6, параллельные оси У (красные) - хорды Х и соответствующий им диаметр 7. Линией 8 (белой) показано направление диаметра, соответствующего хордам У. Направление оси xm местной системы координат, определенное по угловым коэффициентам двух диаметров, показано линией 9 (желтой).
Зная ориентацию эллипса на плоскости Оху, можно определить коэффициент сжатия, используя для этого связь между угловым коэффициентом хорды и его диаметра.
Зная коэффициент сжатия, можно определить значения полуосей эллипса, используя для этого уравнение эллипса и считая, что все точки массива хорд Х принадлежат эллипсу.
Полученная зона на плоскости Оху расширяется до пространственной зоны - эллипсоида с использованием индивидуальных параметров локальных зон поражения ОС.
Интегральная зона поражения позволяет определить пространственные и временные параметры цели относительно группировки ОС по параметрам траектории сопровождаемой цели и значению работного времени по цели. Работное время по цели складывается из времени передачи целеуказания с командного пункта подразделения на ОС в составе подразделения, времени реакции, определенного тактико-техническими характеристиками (ТТХ) ОС (Л7), и полетного времени поражающих элементов, зависящего от типа ОС.
На фиг.3-6 показаны временные характеристики цели, проходящей интегральную зону поражения. Зона построена для батареи в составе четырех ОС с максимальной дальностью поражения 12 км и работным временем по цели 10 с. Точка начала местной системы координат зоны Хе, Ye, угол поворота местной системы координат Be. Полуоси эллипсоида зоны Ax, Ay, Ah. Зона ограничена по высоте значением Hm. Времена T1, T2, Т3 соответствуют подлетному времени, времени выхода цели из зоны и времени нахождения цели в зоне соответственно. На фиг.3-6 эти времена определены для упрежденной точки цели.
На фиг.3 показано приближение цели к зоне. Участок траектории 10 (синий) - текущий отрезок траектории. Утолщенный участок траектории 11 (белый) - упрежденный участок траектории на время, равное работному времени. Цель может быть отобрана для батареи, когда упрежденный участок траектории коснется поверхности зоны. На фиг.4 показан вход цели в зону поражения батареи. Часть 12 (красный цвет) упрежденного участка 11 разрешает отобрать цель для батареи. На фиг.5 цель находится в зоне. Возможность отбора цели сохраняется до того момента, когда время нахождения цели в зоне станет меньше работного времени. На фиг.6 цель выходит из зоны, белый цвет на упрежденном участке запрещает отбор цели.
Определение границ охватывающей прямоугольной области.
Верхняя граница прямоугольной области x2 определяется путем сложения xk и rk для каждого ОС и выбора максимального значения для всех ОС. Аналогично определяется нижняя граница x1, левая граница y1, правая граница у2.
Построение массивов хорд.
Точки yi1 и yi2 отрезков Pi1Pi2 массива хорд Х определяются путем нахождения точек пересечения линии xi с границами локальных зон ОС. Для выбранного очередного значения xi для каждого из N ОС определяются точки пересечения линии
х=x i
и границы зоны Pk для выбранного ОС, где k принимает значения от 1 до N
(х-xk)2+(у-yk)2=rk 2.
Совместным решением двух уравнений относительно у получаем минимальное значение yi1

и максимальное значение yi2

где Q=rk 2-(xi-xk)2.
После просмотра всех N зон ОС группировки для yi1 выбирается минимальное найденное значение, а для yi2 максимальное.
Аналогично получаются значения массива хорд Y по линиям, параллельным оси х. Получаем массив отрезков линий Pj1Pj2 с точками Pj1(yj, xj1) и Pj2(yj, xj2).
Определение диаметров хорд.
Диаметр хорд X, то есть линия, проходящая через точку (xA yA) с угловым коэффициентом kX и делящая все хорды Х пополам, определяется по методу наименьших квадратов
y=yA+kX·(х-xA),
где 
kX=Sy/Sx,

n - количество Х хорд.
Полученная линия оптимально делит хорды области, параллельные оси у, пополам. Поскольку при вычислении диаметра координатой является ось х, угол диаметра
αX=arctg(kX)
отсчитывается от оси х. Положительное направление - по часовой стрелке от оси х.
Аналогично, используя массива хорд У, по методу наименьших квадратов получаем прямую линию, проходящую через точку (xB yB) с угловым коэффициентом kY и делящую все хорды У пополам
x=xB+kY·(у-yB),
где 
kY=Sx/Sy,

m - количество У хорд.
Полученная линия оптимально делит хорды области, параллельные оси х, пополам. Поскольку при вычислении диаметра координатой является ось у, угол диаметра
αY=arctg(kY)
отсчитывается от оси у. Положительное направление - против часовой стрелки от оси у.
Определение ориентации эллипса.
Для эллипса хордам с угловым коэффициентом k1 отвечает диаметр
y=kd•x.
Угловой коэффициент диаметра kd определяется из соотношения

где b и а - полуоси эллипса.
Угловые коэффициенты kd и k1 определяются в системе координат, в которой полуось а расположена на оси х, а полуось b на оси у. Допустим, β - искомый угол поворота оси xm местной системы координат относительно оси х. Определив угловые коэффициенты для хорд X, У и их диаметров kX и kY через угол β, получим следующие выражения для произведения угловых коэффициентов хорд и их диаметра:
для хорд Х 
для хорд У tg(β)/tg(β+αy)=С.
Решением этих уравнений относительно β будет выражение

где A=2(kx•ky)/(ky-kx).
Для правильного эллипса, полуось а которого лежит на оси х и отношение а к b меньше единицы, kx и ky равны нулю. При повороте полуоси а по часовой стрелке от нуля до 45 градусов kx и ky оба со знаком минус и будут равны по величине при β, равном 45 градусов. При повороте полуоси а против часовой стрелки от нуля до минус 45 градусов kx и ky оба со знаком плюс и будут равны по величине при β, равном минус 45 градусов. Для произвольной области возможны разные случаи.
Угловые коэффициенты kx, ky малы по абсолютной величине. Это означает, что диаметры области являются главными диаметрами, то есть полуосями эллипса. В этом случае полуось а эллипса лежит на оси х, угол β равен нулю.
Угловые коэффициенты kx, ky имеют одинаковые знаки и не равны. Это означает, что область симметрична в местной системе координат, а местная система координат имеет угол поворота на плоскости Оху. Угол поворота β вычисляется по выражению (3).
Угловые коэффициенты kx, ky имеют одинаковые знаки и равны. Это означает, что область симметрична относительно своих собственных местных координат, а местная система координат повернута на плоскости Оху. Угол поворота β равен 45 градусов при отрицательных угловых коэффициентах и -45 градусов при положительных.
Угловые коэффициенты kx, ky имеют разные знаки. Это случай несимметричности области относительно своих собственных местных координат. Такая ситуация может возникнуть, если локальные области поражения ОС на плоскости Оху не пересекаются. В этом случае эллипс просто вписывается в охватывающую прямоугольную область, а угол β принимается равным нулю.
Определение коэффициента сжатия.
Определить квадрат отношения полуоси а к полуоси b можно, используя выражение (2)

Использовать это выражение можно, если угол β не равен нулю. В случае, когда угол β равен нулю, коэффициент сжатия определяется как отношение сторон охватывающей прямоугольной области
kS=(x2-x1)/(у2-y1).
Определение значений полуосей эллипса.
С использованием коэффициента сжатия kS уравнение эллипса можно записать в виде
a2=x2+k2 S•y2,
b2=x2/k2 S+у2.
Считаем, что все точки Pi1 и Pi2 принадлежат эллипсу. Тогда средние значения для а и b могут быть получены из n выражений для а и b


где n - количество хорд;
Pmil(xmi1,ymi1) и Pmi2(xmi2,ymi2) - координаты точек Pi1 и Pi2, переведенные в местную систему координат Oxmymhm с учетом смещения местной системы координат в точку PS(xS, yS) и поворота на угол β
xmi1=(xi-xS)cos(β)+(yi1-yS)sin(β),
ymil=-(xi-xS)sin(β)+(yi1-yS)cos(β),
xmi2=(xi-xS)cos(β)+(yi2-yS)sin(β),
ymi2=-(xi-xS)sin(β)+(yi2-yS)cos(β),
Определение параметров эллипсоида.
Параметры эллипсоида, охватывающего все пространственные локальные зоны поражения ОС группировки, следующие:
P(xS, yS, hS) - начальная точка системы координат Oxmymhm,
а, b, с - полуоси эллипсоида,
β - угол поворота местной системы координат,
hmax - ограничение зоны по высоте.
Для определения значений hS, с, hmax используются параметры локальных ОС группировки. Высота начальной точки местной системы координат hS принимается равной высоте точки стояния hk того ОС, который имеет минимальное значение.
Значение полуоси эллипсоида с в направлении оси hm принимается равным значению высоты, которая получается путем сложения максимального значения hk для ОС в составе группировки со значением полуоси а или b, которая имеет большее значение.
Высота плоскости hmax, ограничивающей интегральную зону, принимается равной ограничению по высоте локальной зоны поражения того ОС, для которого сумма значения высоты точки стояния hk и ограничения по высоте, определенное в ТТХ на ОС, имеет большее значение.
Таким образом, полученная пространственная зона соответствует максимальной зоне, охватывающей все локальные.
Определение характеристик цели для группировки ОС.
В системе координат Oxyh линейная траектория цели определяется параметрами
Рс(xc, yc, xc) - текущая точка цели,
Vc(vx, vy, vh) - составляющие скорости цели.
Вычисление подлетного времени цели к зоне группировки ОС и времени нахождения цели в зоне поражения группировки выполняются в местной системе координат Oxmymhm. Перевод координат точки цели в местную систему координат выполняется по выражениям
xcm=(xc-xS)•cos(β)+(yc-yS)•sin(β),
ycm=-(xc-xS)•sin(β)+(yc-yS)•cos(β),
hcm=hc-he.
Перевод составляющих скорости цели в местную систему координат выполняется по выражениям
vxm=vx•cos(β)+vy•sin(β),
vym=-vx•sin(β)+vy•cos(β),
vhm=vh.
Совместным решением уравнения эллипсоида
x2/a2+y2/b2+h2/c2=1
и параметрического уравнения движения цели
x=xcm+vxm·t,
y=ycm+vym·t,
h=hcm+vhm·t
относительно t является выражение
t2+2B·t+С=0,
где
B=(b2·c2·xcm·vxm+a2·c2·ycm·vym+a2·b2·hcm·vhm)/A,
C=(b2·c2·xcm 2+a2·c2·ycm 2+a2·b2·hcm 2-a2·b2·c2)/A,
A=b2·c2·xcm 2+a2·c2·vym 2+a2·b2·vhm 2.
Решение этого выражения


где Q=В2-С.
Полученные значения времени Т1 и Т2 означают следующее. Если эти значения времени мнимые, то линия траектории цели не пересекает зону группировки ОС. Если эти значения вещественные, то время Т1 определяет время входа цели в зону поражения, отсчитанное от текущего момента времени, а время Т2 определяет время выхода цели из зоны поражения, отсчитанное от текущего момента времени. При этом отрицательное значение времени Т1 означает, что цель вошла в зону поражения за Т1 секунд до текущего времени, а отрицательное значение времени Т2 означает, что цель покинула зону поражения Т2 секунд назад от текущего времени.
Определение признака возможности отбора цели для группировки ОС.
Предположим, что единичное значение признака Pt означает потенциальную возможность работы по цели ОС в составе группировки. Определение значения признака Pt рассмотрим на примере полета цели на высоте ниже максимальной.
Для определения значения Pt используется работное время по цели. Если в группировку входят ОС с разными работными временами, то определяются два значения работного времени Трб и Трд. Время Трб равно максимальному работному времени для ОС в составе группировки, а время Трд минимальному.
Если Q меньше нуля или Т2 меньше нуля, то устанавливается нулевое значение Pt, дальнейший анализ не проводится.
Если Т1 или Т2 больше нуля, то траектория цели пересекает зону. Значение признака Pt при положительном Т1 устанавливается по Трб. Если Трб больше Т1, устанавливается нулевое значение Pt, иначе единичное.
Если Т1 меньше нуля, а Т2 больше нуля, то цель уже находится в зоне группировки ОС. Значение Pt устанавливается по Трд. Если Трд больше Т2, устанавливается нулевое значение Pt, иначе единичное.
Промышленная применимость
Данное предлагаемое изобретение промышленно реализуемо, обеспечивает определение параметров пространственной интегральной зоны поражения группировки ОС на стоянке, в движении и при изменении состояния ОС, позволяет определить пространственные и временные характеристики цели относительно зоны поражения для принятия решений отбора целей, т.е. обладает более широкими функциональными возможностями по сравнению с известными методами, повышенной эффективностью ведения огня и огневого поражения.
При разработке и исследовании данной методики была создана цифровая модель с возможностью вероятностного и статического расположения ОС на местности и задания характеристик ОС группировки. Проверка методики выполнена при постановке различных сценариев состава ОС группировки и различного расположения ОС на местности. Проверки показали возможность использования метода для автоматизации отбора целей на уровне соединений и частей войсковой ПВО.
Предлагаемый метод включается в состав алгоритмов программного обеспечения разрабатываемого изделия по теме «Барнаул-Т» в части задач распределения усилий по целям на уровне соединений и частей войсковой ПВО.
Литература
1. Гаврилов А.Д., Грудинин И.В. Исторический анализ развития сущности и содержания управления огнем зенитных средств. // Военно-исторический журнал, №12, 2004 г.
2. Гусев Е.Н., Розум М.Н., Семенов Н.Ф., Бойко Ю.Л. Основы управления зенитными подразделениями в различных видах общевойскового боя. Санкт-Петербургский государственный горный институт. 2004 г.
3. Мобильный зенитный ракетный комплекс (патент на изобретение RU №2253820 С2, заявка 2003108424/02 от 28.03.2003, МПК F41F 3/04, F41H 11/02, F41G 7/00, опубл. 10.06.2005).
4. Зенитный ракетно-пушечный комплекс (патент на изобретение RU №2131577 С1, заявка 98110047/02 от 27.05.1998, МПК F41G 7/20, F41G 5/08, опубл. 10.06.1999).
5. Подсистема представления информации о характеристиках радиотехнической системы, зависящих от свойств рельефа местности (патент на изобретение RU №2087001 С1, заявка 94018673 от 24.05.1994, МПК G01S 7/40, опубл. 10.08.1997).
6. Корн Г. и Корн Т. Справочник по математике для научных работников и инженеров. М.: Наука, 1974.
7. Военная Россия - Ракетное и космическое оружие. Электронный справочник. Разработка Русского военно-исторического фонда по заказу Медиа Хауз, 2006.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ КООРДИНАТ ЦЕНТРА И РАДИУСА ЦИЛИНДРИЧЕСКИХ УЧАСТКОВ ДЕТАЛЕЙ | 2014 |
|
RU2581384C1 |
| Способ диагностики зубочелюстных аномалий | 1989 |
|
SU1727784A1 |
| СПОСОБ АДАПТИВНО-МАРШРУТНОГО УПРАВЛЕНИЯ ПИЛОТИРУЕМЫМ ЛЕТАТЕЛЬНЫМ АППАРАТОМ | 2013 |
|
RU2568161C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО ОПРЕДЕЛЕНИЯ ГЕОМЕТРИЧЕСКИХ ПАРАМЕТРОВ СЕРДЦА И ТОРСА ПАЦИЕНТА ПО ФЛЮОРОГРАФИЧЕСКИМ СНИМКАМ И ИХ ВИЗУАЛИЗАЦИИ | 2016 |
|
RU2639018C2 |
| СПОСОБ АВТОМАТИЧЕСКОГО ОПРЕДЕЛЕНИЯ ВЫИГРЫШНОГО НОМЕРА ПРИ ИГРЕ В РУЛЕТКУ | 2003 |
|
RU2261747C2 |
| Способ пространственного отождествления пеленгов с наземными источниками радиоизлучения | 2020 |
|
RU2731682C1 |
| Способ определения элементов ориентирования фотоснимка местности | 1990 |
|
SU1770744A1 |
| ПИКСЕЛЬНОЕ ПРЕОБРАЗОВАНИЕ И ПЕЧАТЬ ДЛЯ МАТРИЦ МИКРОЛИНЗ, ЧТОБЫ ОСУЩЕСТВЛЯТЬ ДВУХОСЕВУЮ АКТИВАЦИЮ ИЗОБРАЖЕНИЙ | 2014 |
|
RU2661743C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ДИАГРАММЫ НАПРАВЛЕННОСТИ ПЬЕЗОЭЛЕКТРИЧЕСКОГО ПРЕОБРАЗОВАТЕЛЯ (ВАРИАНТЫ) | 2009 |
|
RU2415388C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КИНЕТИЧЕСКИХ ТЕПЛОФИЗИЧЕСКИХ СВОЙСТВ АНИЗОТРОПНЫХ КОМПОЗИТНЫХ МАТЕРИАЛОВ | 2020 |
|
RU2753620C1 |
Способ относится к области компьютерной технологии в военном деле, а именно к организации системы огня зенитных соединений и частей войсковой противовоздушной обороны (ПВО) в части построения интегральной зоны поражения группировки огневых средств (ОС). Заявленный способ предназначен для оценки эффективности системы огня и определения параметров боевого управления в автоматизированной системе управления (АСУ) соединений и частей с использованием зоны поражения огневых средств, входящих в состав соединений и частей. Достигаемый технический результат изобретения - автоматизация отбора целей для подчиненных соединений и частей войсковой ПВО для выполнения дальнейшей работы по целям в подразделении. В рассматриваемом способе по параметрам зон поражения локальных ОС, входящих в состав соединений и частей, определяются параметры пространственной интегральной зоны поражения группировки ОС, что упрощает определение пространственных и временных характеристик цели относительно зоны подразделения и повышает оперативность принятия решений отбора целей на уровне подразделений. Получаемая интегральная зона позволяет определить прохождение траектории цели через зону, определить время входа цели в зону и время вылета цели из зоны, позволяет выполнить отбор цели своевременно, то есть обеспечить возможность поражения цели на границе зоны поражения, позволяет выполнить отбор с учетом ограничений работы по цели по высоте и параметру. 6 ил.
Способ построения интегральной зоны поражения группировки огневых средств (ОС), реализуемый с использованием текущих параметров эллипсоидальной формы локальных зон поражения огневых средств, входящих в состав группировки, и использующий эти данные для обработки с помощью средств вычислительной техники, отличающийся нижеприведенным алгоритмом обработки данных локальных зон поражения ОС в составе группировки с использованием следующих исходных данных:
на основе цифрового моделирования принимается, что для рассматриваемой задачи оптимальным видом интегральной зоны является эллипсоидная зона,
Pk(xk, yk, hk) - точка стояния ОС,
(xk, yk, hk) - координаты точки стояния ОС в левой прямоугольной системе координат Oxyh,
rk - максимальная дальность поражения ОС, определенная тактико-техническими характеристиками (ТТХ) огневого средства,
где индекс k - порядковый номер ОС в составе группировки огневых средств,
с использованием следующих последовательных шагов:
шаг 1 - по значениям rk и точкам стояния Pk определяются границы прямоугольной области, охватывающей все локальные зоны ОС:
верхняя граница прямоугольной области x2 определяется путем сложения xk и rk для каждого ОС группировки и выбора максимального значения из всех полученных, аналогично определяется нижняя граница x1, левая граница y1 и правая граница y2;
шаг 2 - по значениям rk и точкам стояния Pk в пределах границ прямоугольной области определяются значения массива отрезков линий Pi1Pi2 с точками Pi1(xi, yi1) и Рi2(хi, yi2),
где индекс i - порядковый номер линии параллельной оси y:
в границах прямоугольной области проводятся линии, параллельные оси у, от значения x1 до значения х2 с шагом по х, определенным по локальной зоне с минимальным rk,
для каждой линии хi определяется минимальное значение yi1
и максимальное значение yi2
 ,
,
где Q=rk 2-(xi-xk)2,
после просмотра всех зон ОС группировки для yi1 выбирается минимальное найденное значение, а для yi2 - максимальное;
шаг 3 - по значениям rk и точкам стояния Pk в пределах границ прямоугольной области определяются значения массива отрезков линий Pj1Pj2 с точками Pj1 (yj, xj1) и Pj2 (yj, xj2),
где индекс j - порядковый номер линии, параллельной оси х:
в границах прямоугольной области проводятся линии, параллельные оси х, от значения y1 до значения y2 с шагом по y, определенным по локальной зоне с минимальным rk,
для каждой линии yj определяется минимальное значение xj1
и максимальное значение xj2
где Q=rk 2-(уj-уk)2,
после просмотра всех зон ОС группировки для xj1 выбирается минимальное найденное значение, а для xj2 - максимальное;
шаг 4 - определяются угловые коэффициенты диаметров для хорд Х и для хорд Y:
угловой коэффициент диаметра хорд X:
kx=Sy/Sх,
где 
n - количество X хорд;
угловой коэффициент диаметра хорд Y:
ky=Sx/Sy,
где 
m - количество Y хорд;
шаг 5 - определяется угол β отклонения полуоси а эллипса от оси x, то есть, отклонение оси xm местной системы координат эллипса Oxmym на плоскости хy от направления оси х:
β=0,5 arctg(A),
где 
шаг 6 - определяется коэффициент сжатия ks:
если угол β не равен нулю,
k2 s=a2/b2=tg(β)/tg(β-arctg(kx)),
если угол β равен нулю,
ks=(x2-x1)/(y2-y1);
шаг 7 - определяются величины полуосей а и b:


где n - количество хорд;
xmil, ymil, xmi2, ymi2 - координаты точек Pi1 и Рi2, переведенные из системы координат Oxyh в местную систему координат эллипса Oxmym, с точкой PS(xS, yS) начала местной системы координат эллипса на плоскости ху, с учетом смещения местной системы координат эллипса в точку PS(xS, yS) и поворота местной системы координат эллипса на угол β:
xmi1=(xi-xS)cos(β)+(yi1-yS)sin(β),
ymil=-(xi-xS)sin(β)+(yi1-yS)cos(β),
xmi2=(xi-xS)cos(β)+(yi2-yS)sin(β),
ymi2=-(xi-xS)sin(β)+(yi2-yS)cos(β),
шаг 8 - определяются выходные данные - параметры эллипсоида, охватывающего локальные зоны поражения, и параметры интегральной зоны поражения группировки огневых средств:
P(xS, yS, hS) - начальная точка местной системы координат Oxmymhm, в которой определены параметры эллипсоида, охватывающего локальные зоны поражения, и параметры интегральной зоны поражения группировки огневых средств,
а, b, с - полуоси эллипсоида в местной системе координат,
β - угол поворота местной системы координат Oxmymhm, на плоскости xy,
hmax - ограничение зоны поражения группировки огневых средств по высоте,
где hS - высота начальной точки местной системы координат, равная высоте точки стояния hk того ОС, который имеет минимальное значение;
значение полуоси эллипсоида с в направлении оси hm принимается равным значению высоты, которая получается путем сложения максимального значения hk для ОС в составе группировки со значением полуоси а или b, которая имеет большее значение,
где hm - ось в местной системе координат, совпадающая по направлению с направлением оси h системы координат Oxyh;
ограничение зоны поражения группировки огневых средств по высоте hmax принимается равным ограничению по высоте локальной зоны поражения того ОС, для которого сумма значения высоты точки стояния hk и ограничения по высоте цели, определенное в тактико-технических характеристиках на ОС, имеет большее значение.
| ПОДСИСТЕМА ПРЕДСТАВЛЕНИЯ ИНФОРМАЦИИ О ХАРАКТЕРИСТИКАХ РАДИОТЕХНИЧЕСКОЙ СИСТЕМЫ, ЗАВИСЯЩИХ ОТ СВОЙСТВ РЕЛЬЕФА МЕСТНОСТИ | 1994 |
|
RU2087001C1 |
| АВТОМАТИЗИРОВАННАЯ СИСТЕМА УПРАВЛЕНИЯ НАВЕДЕНИЕМ И ОГНЕМ БОЕВОЙ МАШИНЫ РЕАКТИВНОЙ СИСТЕМЫ ЗАЛПОВОГО ОГНЯ (ВАРИАНТЫ) | 1999 |
|
RU2167380C2 |
| САМОХОДНАЯ ОГНЕВАЯ УСТАНОВКА ОБНАРУЖЕНИЯ, СОПРОВОЖДЕНИЯ И ПОДСВЕТА ЦЕЛЕЙ, НАВЕДЕНИЯ И ПУСКА РАКЕТ ЗЕНИТНОГО РАКЕТНОГО КОМПЛЕКСА СРЕДНЕЙ ДАЛЬНОСТИ | 2002 |
|
RU2208213C1 |
| СПОСОБ ВЕДЕНИЯ ОГНЯ И СИСТЕМА УПРАВЛЕНИЯ ОГНЕМ ВЫСОКОТЕМПНЫМИ ПУШКАМИ | 2000 |
|
RU2184336C2 |
| US 4402250 A, 06.09.1983 | |||
| US 5824942 A, 20.10.1998 | |||
| WO 9923443 A1, 15.05.1999 | |||
| US 4449041 A, 15.05.1984. | |||

