Настоящее изобретение относится к способу и системе для содействия пилотированию воздушного судна, летящего на малой высоте.
В рамках настоящего изобретения под полетом на малой высоте подразумевается полет по траектории полета (на малой высоте), позволяющей воздушному судну следовать как можно ближе к пролетаемой местности, в особенности, чтобы избежать засечения положения воздушного судна. Такая траектория полета на малой высоте, следовательно, проходит на предопределенной высоте над местностью, например на высоте 500 футов (примерно 150 метров).
Хотя и не в исключительной форме, настоящее изобретение более конкретно относится к военному транспортному самолету, которому свойственны низкое соотношение тяга/масса и высокая инертность, а также относительно длительное время, которое необходимо для маневрирования. В случае обнаружения угрозы атаки типа земля-воздух (визуально или иным образом посредством бортовой электронной системы радиоэлектронного подавления) такой военный транспортный самолет должен быть способен, исходя из очевидных соображений безопасности, быстро выполнить изменение курса, которое не было запрограммировано вначале.
Однако определение траектории полета на малой высоте требует очень большой вычислительной мощности в части бортовых систем воздушного судна. Поскольку изменение курса, которое предоставляет возможность выйти из опасной зоны как можно быстрее, должно быть выполнено практически незаметно, пилот не может вручную перепланировать новый курс. В частности, во-первых, такая манипуляция требует определенного времени (перепланирование от точки к точке), во-вторых, вычисление траектории на малой высоте по новому боковому курсу также требует определенной задержки. Эти различные временные интервалы занимают порядка нескольких секунд, что в определенных ситуациях может быть слишком много, чтобы предоставить возможность воздушному судну удалиться из вражеской зоны, в частности, во время вышеупомянутой угрозы типа земля-воздух.
Настоящее изобретение имеет целью устранить эти недостатки. Оно относится к способу содействия пилотированию воздушного судна, летящего на малой высоте.
Для этой цели согласно настоящему изобретению упомянутый способ примечателен тем, что автоматически и повторяющимся образом выполняются операции, на которых:
a) определяют, по меньшей мере, одну траекторию уклонения, по меньшей мере, на предопределенном расстоянии перед воздушным судном, причем упомянутая траектория уклонения соответствует боковой траектории на малой высоте и содержит, по меньшей мере, один боковой поворот;
b) определяют профиль местности, находящейся под этой траекторией уклонения;
c) в зависимости от упомянутого профиля местности определяют, по меньшей мере, первый предельный угол, соответствующий углу, по которому должен лететь самолет, чтобы иметь возможность пролететь над упомянутой местностью по всему упомянутому предопределенному расстоянию вдоль упомянутой траектории уклонения; и
d) представляют пилоту на просмотровом экране, по меньшей мере, первый характерный знак, который отображает упомянутый первый предельный угол и который связан с угловой шкалой, с которой также связан символ, иллюстрирующий вектор путевой скорости воздушного судна.
Таким образом, посредством настоящего изобретения пилоту становится доступна в любое время и без необходимости каких-либо действий с его стороны, по меньшей мере, одна траектория уклонения, что предоставляет возможность выполнить маневр уклонения, в частности, в случае внезапной угрозы, в особенности угрозы типа земля-воздух. Такая траектория уклонения предоставляет возможность пилоту удалиться от угрозы, между тем продолжая полет на малой высоте (в соответствии с упомянутой траекторией уклонения), что выполняется в абсолютной безопасности, поскольку пилоту также известен предельный угол, на котором он должен пилотировать воздушное судно, чтобы пролететь над местностью по упомянутой траектории уклонения. Сверх того, следует отметить, что упомянутый символ, иллюстрирующей вектор путевой скорости, предоставляет пилоту индикацию мгновенного угла воздушного судна относительно поверхности.
Таким образом, посредством настоящего изобретения в течение маневра уклонения воздушное судно может продолжать лететь на малой высоте в сохранности, как и при полете по исходной траектории на малой высоте (рассчитанной по исходному плану полета).
В первом варианте осуществления упомянутый первый предельный угол соответствует минимальному углу, по которому должно лететь воздушное судно, чтобы иметь возможность пролететь над упомянутой местностью по всему упомянутому предопределенному расстоянию вдоль упомянутой траектории уклонения, независимо от летно-технических характеристик упомянутого воздушного судна.
В этом первом варианте осуществления преимущественно:
- на этапе с) в зависимости от предопределенных условий полета и фактических летно-технических характеристик упомянутого воздушного судна, сверх того, определяют, по меньшей мере, один второй предельный угол, соответствующий максимальному углу, по которому может лететь воздушное судно. В этом случае в первой разновидности варианта осуществления упомянутые предопределенные условия полета относятся к нормальной работе всех двигателей воздушного судна, тогда как во второй разновидности варианта осуществления упомянутые предопределенные условия полета относятся к предполагаемому отказу двигателя воздушного судна, и
- на этапе d) на просмотровом экране представляют, по меньшей мере, один второй характерный знак, который отображает второй предельный угол и который также связан с упомянутой угловой шкалой.
Таким образом, посредством упомянутого первого и второго характерных знаков пилоту становится известно, остается ли совместимым угол, который требуется (первый характерный знак), чтобы пролететь над местностью вдоль траектории уклонения, с наилучшим углом набора высоты (вторым характерным знаком) исходя из угла, который доступен в любой момент времени (в зависимости от фактических летно-технических характеристик воздушного судна), и это происходит либо при всех работающих двигателях или путем предугадывания состояния с одним отказавшим двигателем упомянутого воздушного судна (которое в этом случае представляет собой воздушное судно многодвигательного типа).
В упомянутом первом варианте осуществления в предпочтительной разновидности варианта осуществления:
- на этапе a) определяют множество траекторий уклонения, каждая из которых содержит различные повороты. Повороты могут быть положительными или отрицательными, то есть в одном направлении или в другом. Траектория уклонения может также содержать нулевой поворот, и в этом случае воздушное судно летит прямо вперед;
- на этапе b) определяют профили местности под этими траекториями уклонения;
- на этапе с) определяют множество первых предельных углов, связанных соответственно с упомянутым множеством траекторий уклонения; и
- на этапе d) на просмотровом экране представляют множество первых характерных знаков, отображающих упомянутое множество первых предельных углов соответственно, причем упомянутую угловую шкалу представляют вертикально, а упомянутые первые характерные знаки представляют горизонтально рядом друг с другом в зависимости от направления или величины соответствующего поворота.
Более того, в этом случае преимущественно:
- на этапе с) определяют множество вторых предельных углов, связанных соответственно с упомянутым множеством траекторий уклонения; и
- на этапе d) представляют на просмотровом экране множество вторых характерных знаков, отображающих соответственно упомянутое множество вторых предельных углов, причем упомянутые вторые характерные знаки представляются горизонтально рядом друг с другом в зависимости от направления и величины соответствующего поворота, так что первый и второй характерные знаки, которые связаны с одной и той же траекторией уклонения, располагаются горизонтально на одном уровне.
Таким образом, пилоту предлагается множество траекторий уклонения, каждая из которых была связана с первым предельным углом и, возможно, вторым предельным углом, посредством чего пилоту представляется возможность выбрать наилучшую возможную траекторию уклонения во время маневра уклонения, между тем упреждая конфигурацию местности, с которой он столкнулся бы вдоль этой выбранной траектории уклонения. Иначе говоря, помощь, предлагаемая посредством настоящего изобретения, заключается, в частности, в мгновенном (или с очень короткой задержкой) предоставлении пилоту индикации наилучшего курса следования на малой высоте, чтобы защитить себя от угрозы, которая только что была обнаружена, и в подтверждении пилоту, что летно-технические характеристики воздушного судна позволяют тот или иной выбор траектории.
Преимущественно, определяется одинаковое количество траекторий уклонения с поворотом направо и траекторий уклонения с поворотом налево.
Сверх того, преимущественно:
- учитывают количество траекторий уклонения, предоставляющих возможность получить, по меньшей мере, одну первую непрерывную кривую, соединяющую вместе упомянутые первые характерные знаки, и/или
- учитывают количество траекторий уклонения, предоставляющих возможность получить, по меньшей мере, вторую непрерывную кривую, соединяющую вместе упомянутые вторые характерные знаки.
Дополнительно, во втором варианте осуществления упомянутый первый предельный угол соответствует максимальному углу пикирования воздушного судна, по которому оно может снижаться до применения набора высоты с полностью отклоненной назад ручкой, на максимальной мощности, чтобы иметь возможность пролететь над упомянутой местностью. Более того, преимущественно, первый характерный знак, отображающий упомянутый первый предельный угол, приспособлен к профилю местности, между тем он ограничен либо упомянутым профилем местности (при пересечении упомянутого профиля этим характерным знаком), либо предопределенной величиной (при отсутствии пересечения).
В этом втором варианте осуществления, преимущественно, когда упомянутый первый характерный знак достигает символа, иллюстрирующего вектор путевой скорости, издается тревожный сигнал.
Сверх того, преимущественно:
- на этапе c), сверх того, определяют наибольший угол набора высоты, по которому способно лететь воздушное судно, и
- на этапе d) на просмотровом экране представляют вспомогательный знак, отображающий этот максимальный угол набора высоты.
Дополнительно, в этом втором варианте осуществления, когда воздушное судно поворачивает:
- на этапе c), сверх того, определяют вспомогательный предельный угол, который соответствует максимальному углу пикирования воздушного судна, по которому оно может снижаться до выравнивания и последующего применения набора высоты с полностью отклоненной назад ручкой, на максимальной мощности, чтобы иметь возможность пролететь над упомянутой местностью, и
- на этапе d) на просмотровом экране представляют вспомогательный знак, отображающий этот вспомогательный предельный угол.
Более того, как дополнение или добавление, когда воздушное судно поворачивает и выровнять воздушное судно не представляется возможным, то издается соответствующий тревожный сигнал.
Сверх того, когда воздушное судно поворачивает, на просмотровом экране, преимущественно, представляется индикация крена, которая указывает пилоту крен, который необходимо обеспечить, чтобы сохранить заданную траекторию.
Дополнительно, в особой разновидности упомянутого второго варианта осуществления:
- на этапе a) определяют множество траекторий уклонения, каждая из которых содержит различные повороты;
- на этапе b) определяют профили местности под этими траекториями уклонения;
- на этапе с) определяют множество первых предельных углов, связанных соответственно с упомянутым множеством траекторий уклонения, и
- на этапе d) на просмотровом экране представляют множество первых характерных знаков, отображающих упомянутое множество первых предельных углов соответственно, причем упомянутую угловую шкалу представляют вертикально, а упомянутые первые характерные знаки представляют горизонтально рядом друг с другом в зависимости от направления и величины соответствующего поворота.
Независимо от рассматриваемого варианта осуществления упомянутый просмотровый экран, предпочтительно, является просмотровым устройством коллиматорного индикатора на лобовом стекле. Это очень выгодно, поскольку в случае внешней опасности пилот, как правило, пытается пилотировать воздушное судно, между тем продолжая смотреть в направлении внешнего окружения наружу из кабины экипажа. Таким образом, при использовании просмотрового устройства коллиматорного индикатора на лобовом стекле пилоту не нужно смотреть вниз на свои пилотажные приборы.
Сверх того, преимущественно, представляется возможность удалить отображение первых характерных знаков, представленных на этапе d). Это удаление может быть выполнено автоматически или вручную, например, в случае хорошей видимости. Кроме того, в качестве примера, их отображение может быть ограничено специфичными случаями, например, в случае плохой видимости.
Сверх того, в особом приложении, в котором используется вышеупомянутый базовый способ и которое предназначено для автоматического предложения пилоту маршрута:
- для каждой траектории уклонения (бокового отклонения относительно оси полета, определяемой двумя точками полета, минимизированным потреблением топлива и т.п.) определяют оценку, которая относится, по меньшей мере, к одному предопределенному критерию;
- определенные таким образом оценки сравнивают друг с другом, и
- в зависимости от этого сравнения выбирают и выделяют одну из упомянутых траекторий уклонения.
Таким образом, посредством вышеупомянутых характеристик способ согласно настоящему изобретению усовершенствуется, так что предоставляется возможность определения оптимальной боковой траектории (маршрута). Естественно, когда определяют оптимальную траекторию и воздушное судно следует по этой траектории, выполнение базового способа согласно настоящему изобретению может продолжаться, чтобы содействовать пилоту в выполнении маневра уклонения в случае неожиданной угрозы.
Настоящее изобретение также относится к системе для содействия пилотированию воздушного судна, например, военного транспортного самолета, летящего на малой высоте.
Согласно настоящему изобретению упомянутая система примечательна тем, что она содержит:
- первое средство для определения, по меньшей мере, одной траектории уклонения, по меньшей мере, на предопределенное расстояние перед воздушным судном, причем упомянутая траектория уклонения соответствует боковой траектории на малой высоте и содержит, по меньшей мере, один боковой поворот;
- второе средство для определения профиля местности, находящейся под этой траекторией уклонения;
- третье средство для определения, в зависимости от упомянутого профиля местности, по меньшей мере, первого предельного угла, соответствующего углу, по которому должно лететь воздушное судно, чтобы иметь возможность пролететь над упомянутой местностью по всему упомянутому предопределенному расстоянию вдоль упомянутой траектории уклонения, и
- средство отображения для представления на просмотровом экране, по меньшей мере, одного первого характерного знака, который отображает упомянутый первый предельный угол и который связан с угловой шкалой, с которой также связан символ, иллюстрирующий вектор путевой скорости воздушного судна.
В первом варианте осуществления упомянутое третье средство сформировано, чтобы определять первый предельный угол, который соответствует минимальному углу, по которому должно лететь воздушное судно, чтобы иметь возможность пролететь над упомянутой местностью по всему упомянутому предопределенному расстоянию вдоль упомянутой траектории уклонения независимо от летно-технических характеристик упомянутого воздушного судна.
В этом случае преимущественно:
- упомянутая система, сверх того, содержит четвертое средство для определения в зависимости от предопределенных условий полета и фактических летно-технических характеристик упомянутого воздушного судна, по меньшей мере, второго предельного угла, соответствующего максимальному углу, по которому может лететь воздушное судно, и
- упомянутое средство отображения представляет на просмотровом экране, по меньшей мере, один второй характерный знак, который отображает второй предельный угол и который также связан с упомянутой угловой шкалой.
Более того, в особой разновидности варианта осуществления:
- упомянутое первое средство определяет множество траекторий уклонения, каждая из которых содержит различный поворот;
- упомянутое второе средство определяет профили местности под этими траекториями уклонения;
- упомянутое третье средство определяет множество первых предельных углов, связанных соответственно с упомянутым множеством траекторий уклонения, и
- упомянутое средство отображения представляет на просмотровом экране множество первых характерных знаков, отображающих соответственно упомянутое множество первых предельных углов, причем упомянутую угловую шкалу представляют вертикально, а упомянутые первые характерные знаки представляют горизонтально рядом друг с другом в зависимости от направления и величины соответствующего поворота.
Более того, в особой разновидности варианта осуществления:
- упомянутое четвертое средство определяет множество вторых предельных углов, связанных соответственно с упомянутым множеством траекторий уклонения, и
- упомянутое средство отображения представляет на просмотровом экране множество вторых характерных знаков, отображающих соответственно упомянутое множество вторых предельных углов, причем упомянутые вторые характерные знаки представляют горизонтально рядом друг с другом в зависимости от направления и величины соответствующего поворота, так что первый и второй характерные знаки, которые связаны с одной и той же траекторией уклонения, располагаются горизонтально на одном уровне.
Дополнительно, во втором предпочтительном варианте осуществления упомянутое третье средство сформировано, чтобы определять упомянутый первый предельный угол, который соответствует максимальному углу пикирования воздушного судна, по которому оно может снижаться до применения набора высоты с полностью отклоненной назад ручкой, на максимальной мощности, чтобы иметь возможность пролететь над упомянутой местностью.
Сверх того, преимущественно:
- упомянутое средство отображения содержит просмотровое устройство коллиматорного индикатора на лобовом стекле, которое содержит упомянутый просмотровый экран, и/или
- упомянутая система, более того, содержит средство управления, предоставляющее возможность генерировать и удалять отображение первых характерных знаков на упомянутом просмотровом экране.
Прилагаемые чертежи разъясняют способ, по которому может быть реализовано настоящее изобретение. На этих чертежах идентичные ссылки обозначают схожие элементы.
Фиг.1 - структурная схема устройства согласно настоящему изобретению;
Фиг.2-5 соответствуют первому варианту осуществления.
Более конкретно:
Фиг.2 - иллюстрации, выделяющие существенные характеристики первого варианта осуществления настоящего изобретения;
Фиг.3 - иллюстрация отображения, реализованного согласно первому варианту осуществления настоящего изобретения;
Фиг.4 - две иллюстрации для разъяснения особого режима отображения, и
Фиг.5 - схематическая иллюстрация особого приложения настоящего изобретения, предоставляющего возможность найти оптимальную боковую траекторию.
Фиг.6-11 соответствуют второму варианту осуществления.
Более конкретно:
Фиг.6 и 7 - иллюстрации для разъяснения существенных характеристик упомянутого второго варианта осуществления;
Фиг.8-10 - иллюстрации различных отображений, демонстрирующих особые характеристики, и
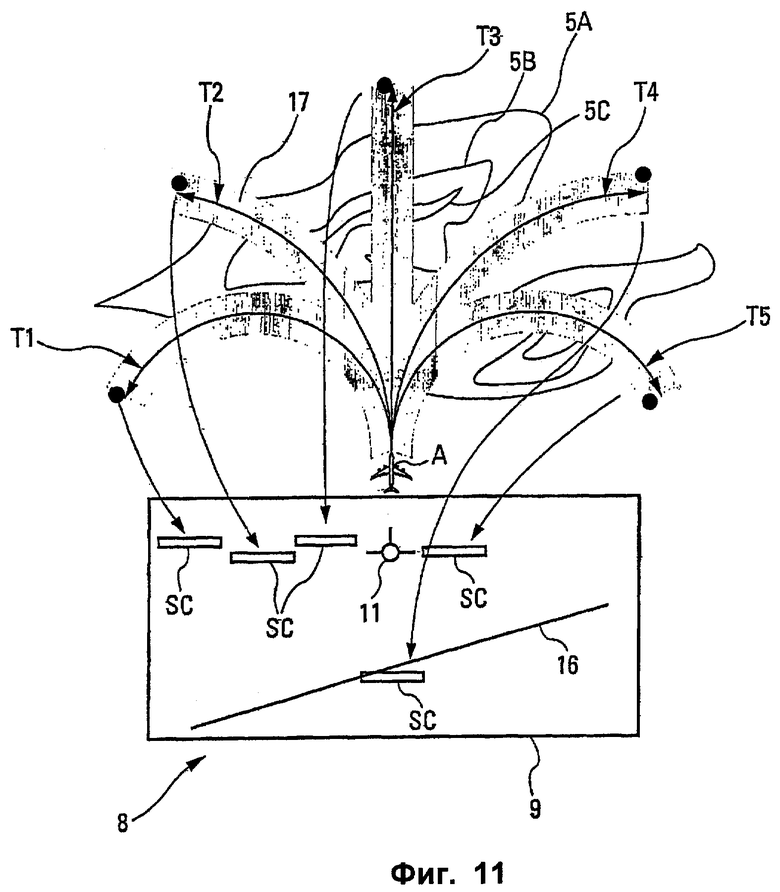
Фиг.11 - изображение, схожее с изображением с Фиг.2, но применимо к упомянутому второму варианту осуществления.
Схематически представленная на Фиг.1 система 1 согласно настоящему изобретению предназначена для содействия пилоту воздушного судна А, например военного транспортного самолета, которое летит на малой высоте, в течение пилотирования упомянутого воздушного судна А.
В рамках настоящего изобретения выражение "полет на малой высоте" подразумевает полет по траектории полета (на малой высоте), позволяющей воздушному судну А следовать как можно ближе к пролетаемой местности 5, в особенности, чтобы избежать засечения положения воздушного судна. Такая траектория полета на малой высоте обычно проходит на предопределенной высоте над местностью, например на высоте 500 футов (примерно 150 метров).
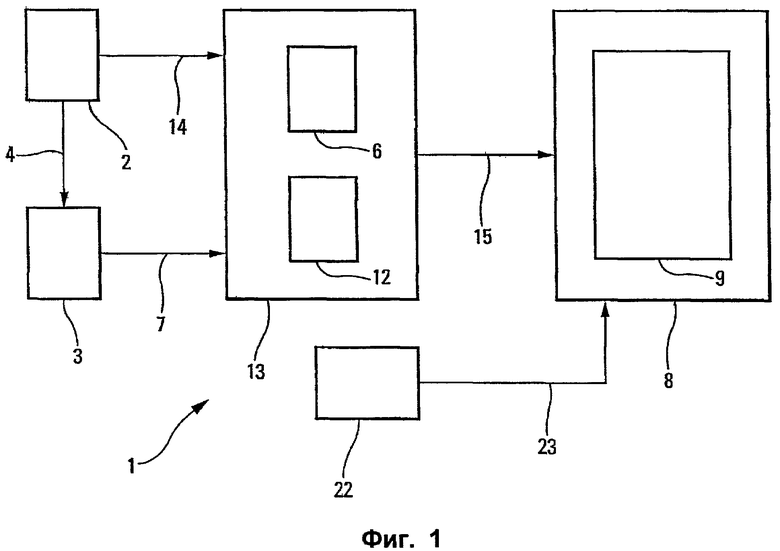
Согласно настоящему изобретению упомянутая система 1 содержит:
- средство 2 для определения, по меньшей мере, одной траектории Ti уклонения, по меньшей мере, на предопределенное расстояние D перед воздушным судном А. Эта траектория Ti уклонения соответствует отрезку боковой траектории на малой высоте;
- средство 3, которое соединено с упомянутым средством 2 посредством связи 4, для определения профиля местности 5, которая расположена под этой траекторией Ti уклонения;
- средство 6 для определения - в зависимости от упомянутого профиля местности, полученного из упомянутого средства 3 через связь 7, - по меньшей мере, одного первого предельного угла, который соответствует углу, по которому должно лететь воздушное судно А, чтобы иметь возможность пролететь над упомянутым профилем местности 5 по всему упомянутому предопределенному расстоянию D вдоль упомянутой траектории Ti уклонения, и
- средство отображения 8 для представления на просмотровом экране 9, по меньшей мере, одного характерного знака Si, который отображает упомянутый первый предельный угол и который связан с угловой шкалой 10, с которой также связан символ 11, иллюстрирующий вектор путевой скорости воздушного судна А (например, Фиг.2 и 3).
Таким образом, система 1 согласно настоящему изобретению в любое время и без необходимости каких-либо действий со стороны пилота предоставляет ему, по меньшей мере, одну траекторию Ti уклонения, что предоставляет возможность выполнять маневр уклонения (полета), в частности, в случае внезапной угрозы, в особенности угрозы типа земля-воздух. Такая траектория Ti уклонения предоставляет возможность пилоту удалить воздушное судно А из зоны, где появилась угроза, между тем продолжая лететь на малой высоте (согласно упомянутой траектории Ti уклонения, которая проходит на малой высоте), что выполняется в полной безопасности, поскольку пилоту также известно о минимальном угле (характерном знаке Si), на котором должно лететь воздушное судно А, чтобы пролететь над профилем местности 5 вдоль упомянутой траектории Ti уклонения.
Следует отметить, что упомянутый символ 11, иллюстрирующий вектор путевой скорости, предоставляет пилоту индикацию мгновенного угла воздушного судна А относительно земли, как описано ниже.
Сверх того, предпочтительно, просмотровый экран 9 упомянутого средства отображения 8 представляет собой экран просмотрового устройства коллиматорного индикатора на лобовом стекле типа HUD ("Head Up Display"). Это очень выгодно, поскольку во время внешней угрозы пилот, как правило, пытается пилотировать воздушное судно А, между тем продолжая смотреть в направлении внешнего окружения наружу из кабины экипажа. Таким образом, при использовании просмотрового устройства коллиматорного индикатора на лобовом стекле, во время такой внешней угрозы пилоту не нужно смотреть вниз на свои пилотажные приборы, чтобы воспользоваться содействием, предлагаемым настоящим изобретением.
Следует отметить, что символ 11, иллюстрирующий вектор путевой скорости, который отображается на просмотровом экране 9 коллиматорного индикатора на лобовом стекле, указывает реакцию воздушного судна А на директиву угла земли, предоставленную стандартной бортовой системой наведения (автопилотом или командным пилотажным прибором), или на директиву пилота при ручном управлении (без автопилота или командного пилотажного прибора). Отклонение между этим вектором путевой скорости и инерциальным горизонтом (проиллюстрированным линией 16 на Фиг.2, 3 и 6-11) отображает мгновенный угол воздушного судна А относительно земли. На Фиг.3 и 6-9 также отображена конфигурация рельефа 18 местности 5, который можно видеть через упомянутый просмотровый экран 9 коллиматорного индикатора на лобовом стекле.
Система 1 согласно настоящему изобретению, сверх того, содержит средство 22 (ручное или автоматическое) управления, предоставляющее возможность генерировать и удалять отображение характерных знаков на упомянутом просмотровом экране 9 (посредством связи 23).
В первом варианте осуществления, показанном на Фиг.2-5, упомянутое третье средство 6 сформировано, чтобы определять первый предельный угол, который соответствует минимальному углу, по которому должно лететь воздушное судно А, чтобы иметь возможность пролететь над упомянутой местностью 5 по всему упомянутому предопределенному расстоянию D вдоль упомянутой траектории T1…T5 уклонения независимо от летно-технических характеристик упомянутого воздушного судна A.
В этом случае преимущественно:
- упомянутая система 1, сверх того, содержит средство 12 для определения - в зависимости от предопределенных условий полета и фактических летно-технических характеристик упомянутого воздушного судна A - по меньшей мере, одного второго предельного угла, соответствующего максимальному углу, по которому может лететь воздушное судно A, и
- упомянутое средство 8 отображения представляет на просмотровом экране 9 характерный знак Ci, который отображает упомянутый второй предельный угол и который также связан с упомянутой угловой шкалой 10.
В этом случае в первом варианте осуществления упомянутые предопределенные условия полета относятся к нормальной работе всех двигателей воздушного судна А (режим со всеми работающими двигателями, All Engine Operative - AEP), тогда как во втором варианте осуществления упомянутые предопределенные условия полета относятся к отказу двигателя воздушного судна (режим с одним неработающим двигателем, One Engine Inoperative - OEI), и, соответственно, в последнем случае воздушное судно является воздушным судном многодвигательного типа.
Также можно предоставить средство (не показано) для переключения, автоматически или вручную, из режима OEI в режим AEO и обратно. Также потенциально возможно предоставить на одном и том же просмотровом экране 9, по меньшей мере, одну пару различных характерных знаков Ci, соответствующих режимам OEI и AEO соответственно.
Таким образом, посредством упомянутых характерных знаков Si и Ci пилоту становится известно, остается ли совместимым угол, который требуется от него (характерный знак Si), чтобы пролететь над профилем местности 5 вдоль траектории Ti уклонения, с наилучшим углом набора высоты (характерным знаком Ci) исходя из угла, и это обеспечивается либо в режиме AEO, либо в режиме OEI упомянутого воздушного судна А (которое в этом случае является воздушным судном многодвигательного типа).
Следует отметить, что концепция, согласно которой учитывается (общий) угол, эквивалентна концепции полной энергии, то есть концепции, которая отражает, какой будет максимальная полная энергия воздушного судна А либо с отказавшим двигателем (режим OEI), либо со всеми работающими двигателями (режим AEO).
Естественно, информация угла (или информация полной энергии) должна учитывать (возможные) изменения курса, такие как изменения, предоставленные траекторией Ti уклонения, поскольку характеристика набора высоты ухудшается в условиях выполнения поворота (в точности на прилагаемый коэффициент нагрузки).
Следует отметить, что для воздушного судна А с инерцией медленного или тяжелого тактического транспортного самолета необходимо учитывать фактическую характеристику. Принимая во внимание полную энергию, представляется возможным извлечь максимальную пользу из характеристики воздушного судна А, предполагая, что энергия преобразуется из кинетической в потенциальную (уменьшение скорости с соответствующим увеличением угла, на котором можно лететь), что предполагает вычисление максимального угла при скорости наилучшего набора высоты. Кроме того, если учитывается угол, представляется возможность наилучшего использования соответствующего отображения на просмотровом экране 9 коллиматорного индикатора на лобовом стекле, накладываемого на ландшафт, наблюдаемый пилотом, как описано ниже. Более того, влияние отказа двигателя очень чувствительно в отношении характеристики набора высоты воздушного судна А, что подчеркивает пользу способности учитывать режим OEI путем упреждения, даже если воздушное судно А движется со всеми работающими двигателями.
В особом варианте осуществления, показанном на Фиг.1, средства 6 и 12 интегрированы в центральный блок 13, который соединен посредством связей 14 и 15 со средством 2 и средством 8 отображения соответственно. В особом варианте осуществления:
- упомянутое средство 2 определяет множество траекторий Ti (где i=1…n и n является целым числом, которое больше 1) уклонения, каждая из которых содержит различный поворот φi (который может быть отрицательным, положительным или нулевым);
- упомянутое средство 3 определяет различные профили местности 5 под этими траекториями Ti уклонения;
- упомянутое средство 6 определяет множество первых предельных углов, связанных соответственно с упомянутым множеством траекторий Ti уклонения, и
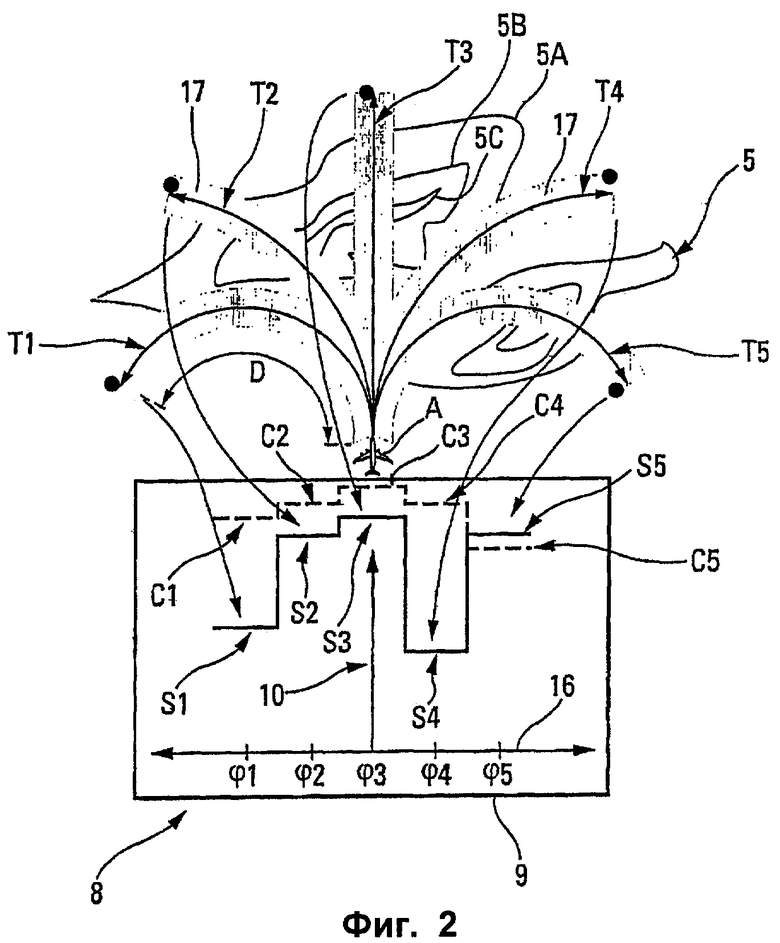
- упомянутое средство 8 отображения представляет на просмотровом экране 9 множество характерных знаков Si, отображающих соответственно упомянутое множество первых предельных углов. Как показано на Фиг.2 (где n=5), угловая шкала 10 представлена вертикально, а упомянутые характерные знаки S1, S2, S3, S4, S5 представлены горизонтально один рядом с другим в зависимости от направления и величины соответствующего поворота φi (φ1, φ2, φ3, φ4, φ5). В этом примере φ3 рассматривается как нулевой поворот (полет прямо вперед), φ1 и φ2 являются отрицательными (поворот налево), а φ4 и φ5 являются положительными (поворот направо).
Более того, в особом варианте осуществления:
- упомянутое средство 12 определяет множество вторых предельных углов, связанных соответственно с упомянутым множеством траекторий Ti уклонения, и
- упомянутое средство 8 отображения представляет на просмотровом экране 9 множество характерных знаков Ci (C1, C2, C3, C4 и C5 на Фиг.2 и 3), отображающих соответственно упомянутое множество вторых предельных углов. Упомянутые характерные знаки Ci (с C1 по C5) представляются горизонтально один рядом с другим в зависимости от направления и величины соответствующего поворота φi, так что характерные знаки Si и Ci (например, S2 и C2), которые связаны с одной и той же траекторией Ti (в этом примере T2) уклонения, располагаются горизонтально на одинаковом уровне (на уровне поворота φ2 для рассматриваемого примера). Более того, предпочтительно, все характерные знаки Ci и Si имеют одинаковую ширину.
В боковом направлении траектории Ti уклонения должны принимать во внимание коридор 17, определенный с обеих сторон, чтобы учитывать ошибки, относящиеся к бортовым системам воздушного судна А.
Максимальное количество траекторий Ti, которое может быть вычислено, зависит от вычислительной характеристики бортового средства 2. Когда количество n траекторий увеличивается, получается общая конфигурация рельефа из-за эффекта сглаживания благодаря принципу выделения местности (сканирование вокруг воздушного судна А все с меньшим и меньшим количеством разрывов).
Когда воздушное судно А движется, местность 5 выделяется с помощью средства 3 вместе с этим движением вдоль коридора 17 каждой предопределенной траектории Ti уклонения. Профиль местности тогда предоставляется в центральный блок 13 для каждой траектории Ti уклонения.
Следует отметить, что средство 3, предназначенное для определения и предоставления отдельных профилей местности для каждой траектории Ti уклонения, содержит стандартное средство, которому известен общий профиль всей местности 5 (различные высоты, которые были изображены с помощью зон 5A, 5B и 5C, на Фиг.2 и 5). Это стандартное средство может быть бортовой цифровой базой данных, содержащей этот общий профиль, или устройством, таким как, например, радар в режиме построения карты, которое формирует упомянутый профиль на борту воздушного судна А.
Когда неожиданно появляется угроза типа земля-воздух, целесообразно, чтобы расстояние (или глубина) D предоставляло возможность изменения курса (или направления), по меньшей мере, на 90° с каждой стороны. Однако просмотровый экран 9 коллиматорного индикатора на лобовом стекле имеет угловую апертуру, которая меньше этого значения (обычно 20° вместо необходимых 180°). Тем не менее, это не имеет существенного значения для формирования изображения различных траекторий Ti уклонения совместимых в боковой плоскости. Важным является то, что пилот знает, какой курс необходимо взять в зависимости от наиболее подходящей конфигурации местности. Соответственно, в любом случае пилот поведет воздушное судно А в подходящем направлении, что делает боковую целостность несущественной, что является важным при удержании следуемого курса.
Также, предпочтительно, боковая целостность при изображении предполагаемого максимального угла уменьшается при отклонении в боковую сторону от вектора путевой скорости, но она идеальная для части, отображающей угол на траектории с нулевым поворотом φ (φ3 для примера с Фиг.2). Это отображение поворачивается любым образом одновременно с воздушным судном А, когда последнее поворачивает в направлении выбранной траектории.
Более того, как помощь при пилотировании отображение согласно настоящему изобретению больше используется в условиях плохой видимости, так что менее важно накладывать на местность определенную информацию (первые предельные углы), отображаемую на просмотровом экране коллиматорного индикатора на лобовом стекле.
Вертикальная целостность для всех намеченных боковых траекторий имеет существенное значение, поскольку отображение касается углов относительно земли. Соответственно, общие углы и траектории задаются относительно земли, а дополнительный фактор нагрузки предоставляет возможность учитывать влияние на повороты.
Фиг.2 дает общее представление об отображении (согласно настоящему изобретению), которое можно наблюдать на экране 9 коллиматорного индикатора на лобовом стекле (в зависимости от различных траекторий, которые могут предвидеться, n=5). Характерные знаки Si и Ci, иллюстрирующие информацию, относящуюся к углам, по которым нужно лететь (чтобы избежать рельефа), и углам, по которым может летать воздушное судно (измененные посредством поворота в случае углов, которые не совмещены с вектором скорости), могут быть соответственно обозначены терминами нижняя метка (характерный знак Si) и верхняя метка (характерный знак Ci).
Эти верхние и нижние метки (или характерные знаки) Ci и Si позиционируются следующим образом:
- началом системы отсчета этих меток является курс воздушного судна (φ3=0);
- вертикально, высота каждой метки позиционируется на отметке Gν·γ mrd (где γ является соответствующим углом) относительно начала просмотрового экрана 9 (инерциального горизонта 16). Если вычисленный угол является отрицательным, то метка позиционируется ниже инерциального горизонта 16, и
- в боковом направлении середина метки позиционируется на отметке GL·φ mrd относительно курса воздушного судна (φ3).
Коэффициенты усиления Gν, GL и ширина каждой метки Ci, Si задаются так, чтобы обеспечить легкое управление вектором скорости. Предпочтительно, коэффициент Gν усиления равен 1, чтобы получить строго согласованное вертикальное отображение, то есть такое отображение, которое соответствует реальным углам.
Следовательно, пилот должен удерживать вектор путевой скорости (символ 11) между верхней и нижней метками Ci и Si, чтобы иметь возможность повернуть с заданным коэффициентом загрузки над местностью 5, между тем оставаясь в пределах фактических летно-технических характеристик воздушного судна А. Условием для выполнения этого является то, чтобы верхняя метка Ci находилась выше нижней метки Si (которая в случае с Фиг.2 и 3 соответствует поворотам с φ1…φ4). В обратном случае (когда C5 находится ниже S5, как на Фиг.2 и 3) угол, необходимый для преодоления местности 5, слишком велик исходя из летно-технических характеристик воздушного судна А.
Следует отметить, что если на одной стороне присутствует скала, можно предоставить на отображенных углах такой коэффициент Gν усиления, чтобы нижние метки Si вышли из просмотрового экрана 9 с верхней стороны, таким образом удерживая пилота от размещения символа 11 вектора скорости воздушного судна А над этими нижними метками Si.
Во время выполнения поворота количество боковых траекторий Ti, а также глубина D этих траекторий Ti сильно зависят от вычислительных способностей системы 1, а также характеристики вычерчивания просмотрового экрана 9. Обработкой, которая требует больше всего вычислительных ресурсов, является выделение (реализованное средством 3) данных местности 5. Следовательно, важно минимизировать выделения местности 5.
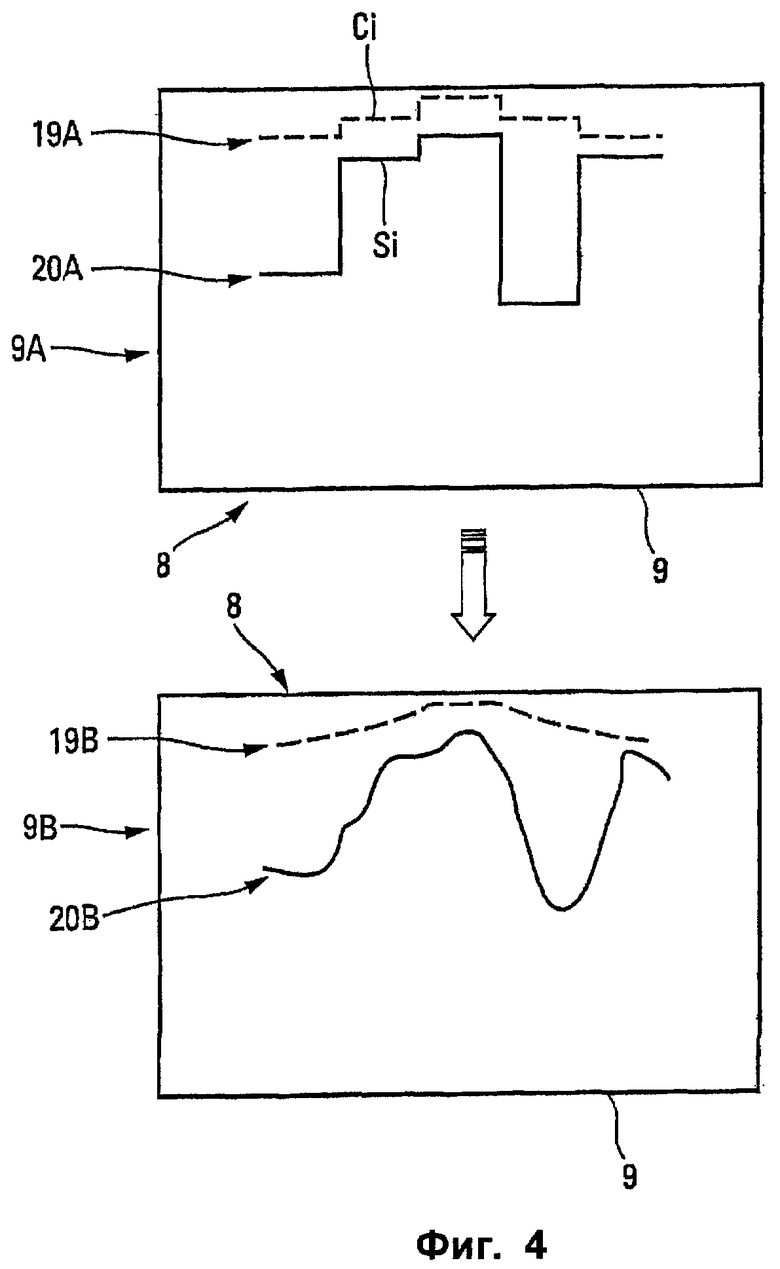
Дополнительно, следует отметить, что, когда количество n очень велико, ширина каждой метки или характерного знака Ci Si неизбежно будет очень мала. В этом случае отображенные профили местности имеют тенденцию выглядеть как фильтрованные профили местности вокруг воздушного судна А (как представлено на иллюстрации 9В с Фиг.4 по сравнению с иллюстрацией 9А, где n=5). Кривые 19А и 20А, снабженные метками Si и Ci, замещаются кривыми 19В и 20В, которые являются сглаженными кривыми.
Следовательно, посредством настоящего изобретения, когда воздушное судно А следует исходному плану полета на малой высоте, система 1 непрерывно вычисляет одну или более траекторий Ti уклонения, которые соответствуют одному или более поворотам φi, количество которых, как правило, одинаково с обеих сторон текущего курса воздушного судна А. Система 1 предоставляет возможность предугадывать конфигурацию местности 5 вдоль этих траекторий Ti уклонения и указывать, позволяют ли фактические летно-технические характеристики, обеспечиваемые воздушным судном А, преодолеть этот рельеф. По причинам производительности (ограничения времени вычисления и, следовательно, минимизации задержки при предоставлении каждой траектории) упомянутые траектории Ti уклонения вычисляются по заданной длине (или глубине) D. Система 1, далее, вычисляет энергии (общие углы) для этого набора боковых траекторий Ti (которые позволяют выполнять маневры уклонения) и представляет достаточно точное состояние на просмотровом экране 9 коллиматорного индикатора на лобовом стекле, чтобы мгновенно (или с очень короткой задержкой) предоставить пилоту индикацию наилучшего курса в полете на малой высоте, чтобы защитить себя от обнаруженной угрозы.
В особом приложении, относящемся к прокладке маршрута, последовательные непрерывные профили могут использоваться, чтобы вычислять профиль полета на малой высоте на определенную глубину перед воздушным судном путем поиска впадин (долин) местности 5 на какой-либо стороне курса воздушного судна А.
В общем, воздушное судно начинает движение из точки В1, чтобы долететь до точки В2. При полете на постоянной высоте прямая линия, очевидно, является самой прямой траекторией, которая минимизирует время полета и расход топлива. При полете на малой высоте пилот может переместиться из точки В1 в точку В2, между тем избегая необходимости лететь над пиками, соответственно, следуя по долинам, что необязательно отражает кротчайший путь, но этот путь предоставляет ему возможность воспользоваться наиболее эффективной маскировкой с использованием рельефа местности.
Выбор той или иной долины, который соответствует выбору продольного продвижения воздушного судна А, выполняется автоматически посредством экспертной системы, которая оценивает комбинации возможных траекторий на определенную глубину впереди воздушного судна А.
Система оценок предоставляет возможность автоматически определять одно направление, а не другое. Оценка, учитываемая этой системой оценок, может зависеть от отклонения от прямой траектории, от дополнительного расхода топлива и от эффективности траектории с точки зрения маскировки с использованием рельефа местности (эффективность, вычисленная с помощью цифровой базы данных местности посредством, например, количества точек, окружающих местность, с которых траектория находится в диапазоне прямой видимости).
Преимущество этого решения заключается в том, что траектория оптимизируется в обоих измерениях. Экспертная система и система оценок, которые не показаны, формируют часть упомянутой системы 1 согласно настоящему изобретению.
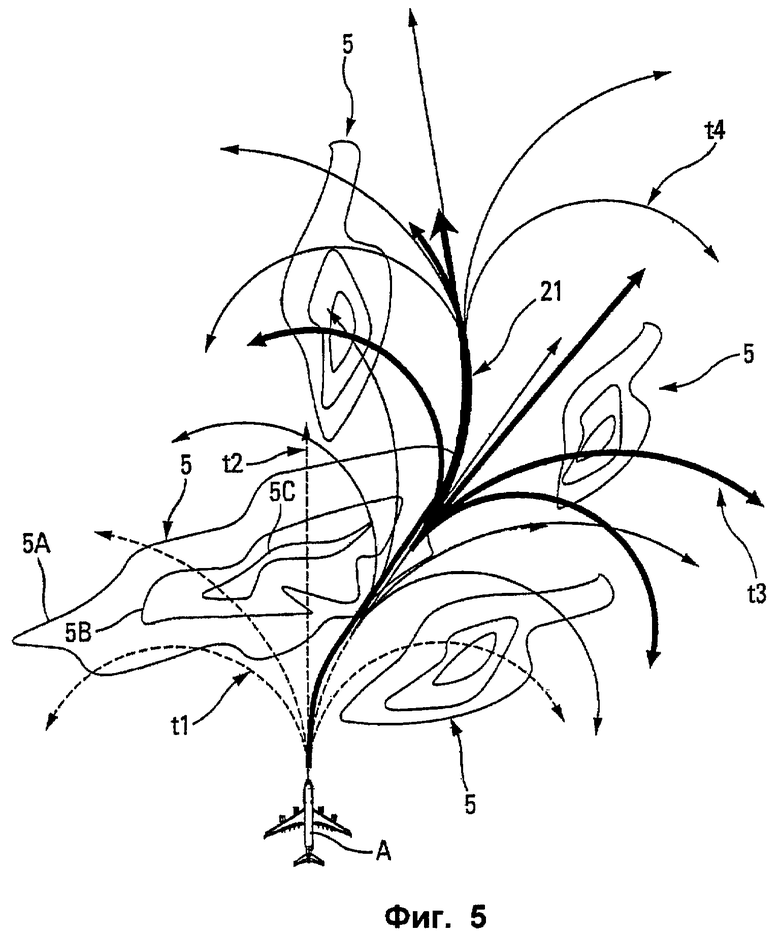
В примере с Фиг.5 можно увидеть, что воздушное судно А может пролететь через впадину на правой стороне, не отходя намного от текущего курса. Экспертная система верифицирует на определенную глубину перед воздушным судном А, что в краткосрочном разрезе это решение действительно лучше, чем вариант слева.
На Фиг.5 проиллюстрированы различные траектории Ti уклонения на различные последовательные моменты времени t1, t2, t3 и t4 (или итерации). Получающаяся в результате траектория соответствует толстой линии центральной траектории 21.
Это особое приложение, которое использует часть вышеупомянутого базового способа, только предоставляет возможность автоматически предлагать оптимальную боковую траекторию (маршрут) для соединения точки В1 с точкой В2 в зависимости от местности. Когда пилот делает выбор следовать этой новой траектории, которая тогда становится заданной траекторией, базовый способ, реализуемый системой 1 (верхняя и/или нижняя метка), будет все еще доступен пилоту, если тому потребуется выполнить маневр уклонения, например, в случае внезапного и неожиданного появления опасности земля-воздух.
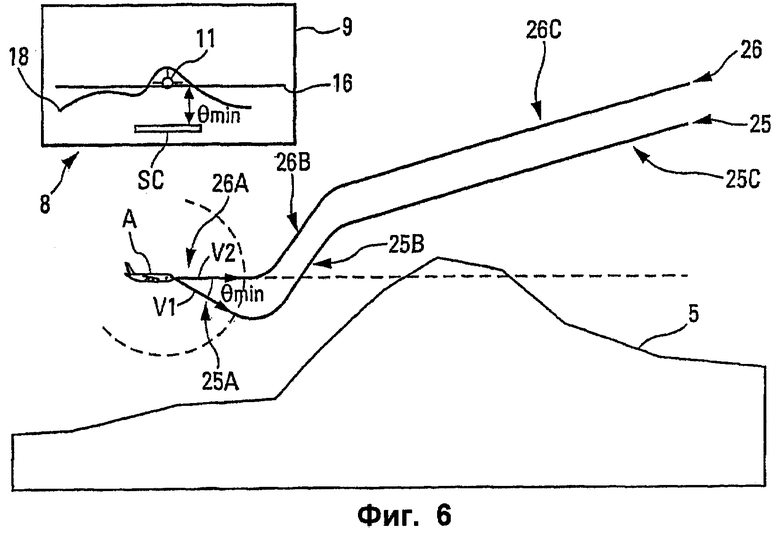
Дополнительно, во втором предпочтительном варианте осуществления, показанном на Фиг.6-11, упомянутое средство 6 сформировано, чтобы определять первый предельный угол θmin, который соответствует максимальному углу пикирования воздушного судна А, по которому оно может снижаться до применения набора высоты с полностью отклоненной назад ручкой, на максимальной мощности, чтобы иметь возможность пролететь над упомянутой местностью 5, пролегающей перед ним.
Подобный маневр с полностью отклоненной назад ручкой (FBS), на полной мощности типа маневра TOGA ("Take-Off/Go-Around" - "Взлет/Уход на второй круг"), то есть при максимальной тяге на взлете или "перелете" при посадке соответствует маневру, когда пилот полностью оттягивает ручку управления назад и использует максимальную мощность воздушного судна А. Известно, что такой маневр не представляет возможности набирать высоту на максимальном угле, которого может достигнуть воздушное судно А, однако для пилота такой маневр представляет собой аварийный маневр, который с точки зрения выполнения является самым простым и самым интуитивным.
В этом втором варианте осуществления средство 8 отображения, следовательно, представляет на просмотровом экране 9 характерный знак SC, который отображает упомянутый предельный угол θmin, как показано на Фиг.6.
Согласно настоящему изобретению средство 6 использует тестовый элемент 25, который предоставляет возможность испытывать способности воздушного судна А в части перелета при вышеупомянутом маневре и который, как показано на Фиг.6 и 7, состоит из:
- прямого сегмента 25A, проиллюстрированного вектором V1, который проходит под углом θmin относительно вектора V2 текущей скорости воздушного судна A, длина которого отражает предопределенную длительность полета;
- вертикальной ресурсной части 25 В и
- сегмента 25С набора высоты с полностью отклоненной назад ручкой на полной мощности.
Общая длина тестового элемента 25 должна предоставлять возможность предвидеть проблемы с достаточным упреждением (порядка нескольких морских миль для тактического транспортного самолета типа А400М). Тестовый элемент 25, следовательно, предоставляет максимальные возможности уклонения для вектора мгновенной скорости, если воздушное судно спускается по углу θmin градусов с вектором V2 текущей скорости. На Фиг.6 и 7 также представлен тестовый элемент 26, содержащий части 26A, 26B и 26C, которые схожи с упомянутыми частями 25A, 25B и 25C за исключением того, что часть 26A иллюстрирует вектор V2 текущей скорости. Этот тестовый элемент 27, следовательно, предоставляет максимальную способность уклонения для мгновенного вектора скорости. Естественно, этот тестовый элемент 26 не должен проходить сквозь профиль местности 5 (в худшем случае, он может соприкасаться с последним).
Определенный таким образом характерный знак SC смещается в направлении нижней части, если тестовый элемент 25 не пересекается с каким-либо элементом местности 5. В этом случае угол θmin имеет предопределенную величину, например -14° для военного транспортного самолета типа A400M.
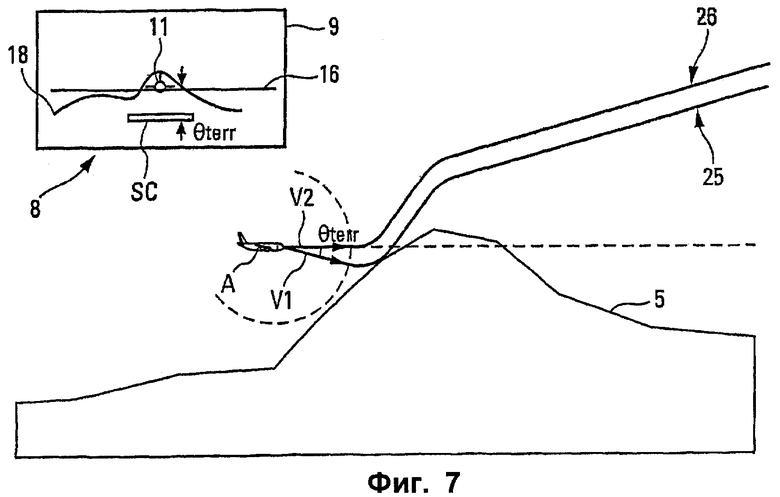
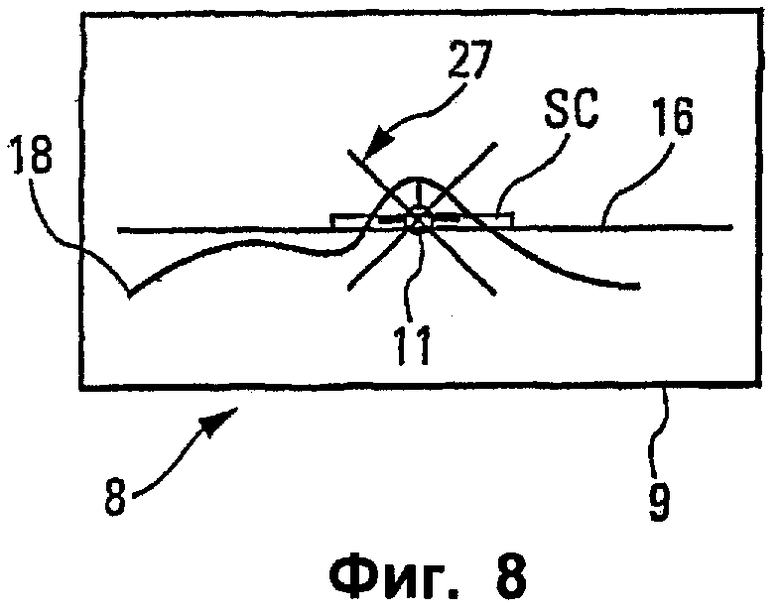
С другой стороны, когда тестовый элемент 25 пересекается с местностью 5, как показано на Фиг.7, упомянутый тестовый элемент 25 приводится в соответствие с профилем местности 5. Таким образом, получается угол θterr между характерным знаком SC и символом 11 (иллюстрирующим вектор путевой скорости воздушного судна А), который меньше вышеупомянутого минимального угла θmin. В такой ситуации при приближении характерного знака SC к символу 11 и при уменьшении запаса прочности пилот должен потянуть за ручку управления, чтобы всегда удерживать характерный знак SC ниже упомянутого символа 11, так чтобы всегда быть в состоянии преодолеть препятствие впереди него. Такой маневр возможен только до тех пор, пока характерный знак SC не выравнивается с символом 11. Когда достигается такая предельная ситуация, устройство 1 издает тревожный сигнал, например, путем отображения особого средства 27 индикации на просмотровом экране 9. Это средство 27 индикации соответствует перекрестию разъединения, как показано на Фиг.8. Он также может быть в форме тревожного сообщения, мигающей метки или стрелки разъединения, например. В экстремальной ситуации, такой как эта, воздушное судно А все еще способно перелететь рельеф, если пилот применит набор высоты с полностью отклоненной назад ручкой, на максимальной мощности, как изложено выше.
С другой стороны, если в экстремальной ситуации, такой как эта, пилот не потянет за ручку управления, то характерный знак SC перейдет выше символа 11, таким образом сигнализируя, что воздушное судно А больше не в состоянии преодолеть рельеф перед ним, по меньшей мере, с ожидаемым запасом прочности. Пилот тогда должен изменить боковую траекторию, чтобы иметь возможность перелететь рельеф.
Следует отметить, что во время маневра уклонения типа маневра FBS/TOGA запас по прочности при снижении начинает расти после того, как пролетают над препятствием. В такой ситуации целесообразно поддерживать маневр типа FBS/TOGA в течение минимального времени, чтобы избежать прерывистого пилотирования, которое приведет к последовательности тревожных сигналов каждый раз, когда пилот ослабляет усилия.
В особом варианте осуществления:
- упомянутое средство 6, более того, определяет угол набора высоты, который соответствует наибольшему углу набора высоты, по которому способно лететь воздушное судно А, либо при всех работающих двигателях, либо с одним неработающим двигателем, и
- упомянутое средство 8 отображения представляет на просмотровом экране 9, как показано на Фиг.9, вспомогательный знак 28, который отображает этот наибольший угол набора высоты на угловой шкале этого просмотрового экрана 9.
Этот особый вариант осуществления предоставляет возможность пилоту ясно видеть остающийся запас прочности по набору высоты, например, путем сравнения характерного знака SC с упомянутым вспомогательным знаком 28.
Ниже рассматривается случай, когда воздушное судно А выполняет в полете поворот.
В этом случае пилот должен сознавать, что бы произошло, если бы он продолжил движение по текущей траектории или если бы было невозможно удержать эту текущую траекторию, что бы произошло на траектории выравнивания до вертикального ресурса при максимальной тяге.
Защита относительно местности обеспечивается на траектории, экстраполированной на основании текущего крена воздушного судна А (возможно, с фильтрацией), а также на траектории, экстраполированной с допущением наличия выравнивания до выполнения маневра FBS/TOGA. Эта вторая траектория не перпендикулярна текущей траектории воздушного судна А, и она содержит отклонения относительно этой нормали с учетом времени, требуемого для выравнивания крыльев. В этом случае:
- центральный блок 13, сверх того, определяет вспомогательный предельный угол, который соответствует максимальному углу пикирования воздушного судна А, по которому оно может снижаться до выравнивания и последующего применения набора высоты типа FBS на максимальной мощности типа TOGA, чтобы иметь возможность пролететь над упомянутой местностью 5. Вертикальная траектория вычисляется одинаковым образом для случая поворота и для случая выравнивания, и
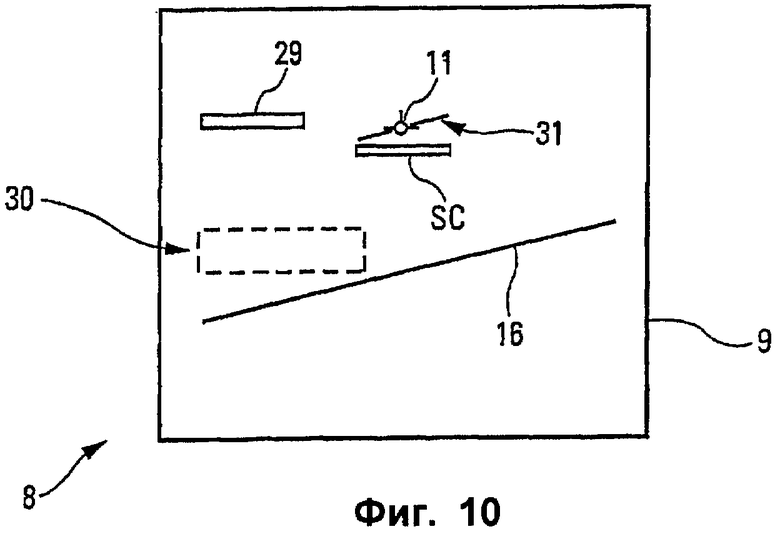
- средство отображения 8 представляет на просмотровом экране 9 вспомогательный знак 29, отображающий этот вспомогательный предельный угол, как показано на Фиг.10.
Вместо того чтобы представлять этот вспомогательный знак 29, относящийся с траектории выравнивания, может быть достаточным издать тревожный сигнал (например, в форме сообщения, которое, например, выводится в прямоугольнике 30, выделенном пунктирной линией на Фиг.10), когда невозможно выровнять воздушное судно А, если бы вспомогательный знак 29 проходил выше символа 11. Этот последний вариант осуществления предоставляет возможность упростить отображение на просмотровом экране 9.
При полете на малой высоте под ручным управлением воздушное судно А пролетает через долины, чтобы воспользоваться маскировкой с использованием местности, например, в отношении каких-либо угроз типа земля-воздух. Соответственно, когда пилот поворачивает воздушное судно А, поскольку он направляется в рельеф, маневр уклонения с выравниванием часто невозможно выполнить. В этом случае, если издается тревожный сигнал, касающийся текущей траектории воздушного судна А:
- либо пилот управляет воздушным судном А так, чтобы набрать высоту, и в этом случае маскировка с использованием рельефа местности больше не может быть эффективной;
- либо, если он желает оставаться как можно ближе к земле, он изменяет поворот согласно возможностям конфигурации местности, то есть:
- либо он увеличивает крен воздушного судна А, то есть он делает более крутой поворот,
- или, если крен уже большой, он расширяет поворот.
Тем не менее, изменение траектории ставит под сомнение необходимость наличия или отсутствия тревоги, и с равной вероятностью пилот может оказаться как в лучшем положении, так и в худшем положении, чем в исходном состоянии.
Соответственно, чтобы устранить этот недостаток, количество траекторий, по которым вычисляется и верифицируется защита с использованием местности, увеличивается, как показано в качестве примера на Фиг.11.
Ситуация с Фиг.11 схожа с ситуацией с Фиг.2, но она относится ко второму варианту осуществления. В этом случае характерный знак SC вычисляется для каждой из траекторий с T1 по Т5 с учетом того, что характерный знак SC, расположенный под символом 11, является характерным знаком, который вычислен для текущей траектории - в этом случае для траектории Т4. Эти характерные знаки SC, следовательно, перемещаются вбок по просмотровому экрану 9 в зависимости от крена, прилагаемого к воздушному судну А. Следовательно, будет достаточным выделить местность вдоль каждой траектории по коридору 17, который зависит, в частности, от качества навигации воздушного судна А.
Следует отметить, что при прямой линии или при повороте характерные знаки SC, расположенные на обеих сторонах характерного знака SC, привязанного к символу 11, предоставляют информацию о местности вокруг воздушного судна А. Следовательно, директива крена известна пилоту заранее. Если он желает изменить траекторию путем применения более крутого или широкого поворота с исходной траектории Т4, то после применения пилотом крена символ 11 разместится относительно характерного знака SC, который соответствует указанному крену.
В рамках настоящего изобретения, когда издается тревога относительно текущей траектории, пилот имеет следующий выбор:
- набрать высоту по текущей боковой траектории; или
- выровнять крылья и набрать высоту; или
- остаться как можно ниже, между тем делая поворот круче или шире.
Эта последняя возможность влечет за собой изменение текущей траектории поворота. Тревога может прекратиться в зависимости от того, не становится ли еще хуже конфигурация местности или еще что-то. Соответственно, горизонтальное отображение местности, например, на навигационном экране, может помочь пилоту в выборе новой боковой траектории, но эта процедура требует хорошего предугадывания местности, что не всегда легко, поскольку такой дисплей должен относиться к типу коллиматорных индикаторов на лобовом стекле. Более того, этот дисплей не дает какой-либо индикации относительно способности перелететь рельеф с точки зрения летно-технических характеристик воздушного судна А. Соответственно, в такой ситуации показанный на Фиг.11 вариант осуществления, содержащий множество траекторий, предоставляет возможность пилоту с легкостью управлять воздушным судном, поскольку соответствующая информация уже представлена на просмотровом экране 9 коллиматорного индикатора на лобовом стекле.
В добавление, если пилот решает следовать траектории, для которой была издана тревога, он не может просто поддерживать исходный крен во время набора высоты, поскольку радиус поворота будет меняться при постоянном крене в течение этого набора высоты. В такой ситуации, как показано на Фиг.10, на просмотровом экране 9, сверх того, представляется индикация 31 крена, которая указывает пилоту крен, который нужно применить, чтобы сохранить заданную траекторию.


Изобретение относится к системам управления самолетом. Способ заключается в том, что автоматически и повторяющимся образом выполняются операции определения траектории уклонения, определения профиля местности, определения предельного угла, представления пилоту на просмотровом экране характерного знака, который отображает предельный угол и который связан с угловой шкалой. Система содержит первое средство для определения траектории уклонения, второе средство для определения профиля местности, третье средство для определения предельного угла, средство отображения для представления на просмотровом экране характерного знака. Воздушное судно по первому варианту содержит вышеуказанную систему. Воздушное судно по второму варианту содержит вышеуказанную систему, которая осуществляет способ, заключающийся в том, что автоматически и повторяющимся образом выполняются операции определения траектории уклонения, определения профиля местности, определения предельного угла, представления пилоту на просмотровом экране характерного знака, который отображает предельный угол и который связан с угловой шкалой. Технический результат заключается в повышении безопасности. 4 н. и 27 з.п. ф-лы, 11 ил.
1. Способ содействия пилотированию воздушного судна (А), летящего на малой высоте, в котором автоматически и повторяющимся образом выполняются операции, на которых:
a) определяют, по меньшей мере, одну траекторию (Т1…Т5) уклонения, по меньшей мере, на предопределенном расстоянии (D) перед воздушным судном, причем упомянутая траектория (Т1…Т5) уклонения соответствует боковой траектории на малой высоте и содержит, по меньшей мере, один боковой поворот (φ1…φ5);
b) определяют профиль местности (5), находящейся под этой траекторией (Т1…Т5) уклонения;
c) в зависимости от упомянутого профиля местности определяют, по меньшей мере, один первый предельный угол, соответствующий углу, по которому должно лететь воздушное судно (А), чтобы иметь возможность пролететь над упомянутой местностью (5) по всему упомянутому предопределенному расстоянию (D) вдоль упомянутой траектории (Т1…Т5) уклонения; и
d) представляют пилоту на просмотровом экране (9), по меньшей мере, один первый характерный знак (S1…S5, SC), который отображает упомянутый первый предельный угол и который связан с угловой шкалой (10), с которой также связан символ (11), иллюстрирующий вектор путевой скорости воздушного судна (А).
2. Способ по п.1, в котором первый предельный угол соответствует минимальному углу, по которому должно лететь воздушное судно (А), чтобы иметь возможность пролететь над упомянутой местностью (5) по всему упомянутому предопределенному расстоянию (D) вдоль упомянутой траектории (Т1…Т5) уклонения, независимо от летно-технических характеристик упомянутого воздушного судна (А).
3. Способ по п.2, в котором:
на этапе с) в зависимости от предопределенных условий полета и фактических летно-технических характеристик упомянутого воздушного судна (А), сверх того, определяют, по меньшей мере, один второй предельный угол, соответствующий максимальному углу, по которому может лететь воздушное судно (А); и
на этапе d) на просмотровом экране представляют, по меньшей мере, один второй характерный знак (С1…С5), который отображает упомянутый второй предельный угол и который также связан с упомянутой угловой шкалой (10).
4. Способ по п.3, в котором упомянутые предопределенные условия полета относятся к нормальной работе всех двигателей воздушного судна (А).
5. Способ по п.3, в котором упомянутые предопределенные условия полета относятся к упреждению отказа двигателя воздушного судна (А).
6. Способ по п.2, в котором:
на этапе а) определяют множество траекторий (Т1…Т5) уклонения, каждая из которых содержит различные повороты (φ1…φ5);
на этапе b) определяют профили местности (5) под этими траекториями (Т1…Т5) уклонения;
на этапе с) определяют множество первых предельных углов, связанных соответственно с упомянутым множеством траекторий (Т1…Т5) уклонения; и
на этапе d) на просмотровом экране (9) представляют множество первых характерных знаков (S1…S5), отображающих упомянутое множество первых предельных углов соответственно, причем упомянутую угловую шкалу (10) представляют вертикально, а упомянутые первые характерные знаки (S1…S5) представляют горизонтально рядом друг с другом в зависимости от направления и величины соответствующего поворота (φ1…φ5).
7. Способ по п.6, в котором, сверх того:
на этапе с) определяют множество вторых предельных углов, связанных соответственно с упомянутым множеством траекторий (Т1…Т5) уклонения; и
на этапе d) представляют на просмотровом экране (9) множество вторых характерных знаков (С1…С5), отображающих соответственно упомянутое множество вторых предельных углов, причем упомянутые вторые характерные знаки (С1…С5) представляют горизонтально рядом друг с другом в зависимости от направления и величины соответствующего поворота (φ1…φ5), так что первый и второй характерные знаки, которые связаны с одной и той же траекторией уклонения, располагаются горизонтально на одном уровне.
8. Способ по п.6, в котором определяют такое же количество траекторий уклонения с поворотом направо, что и траекторий уклонения с поворотом налево.
9. Способ по п.6, в котором учитывают количество траекторий уклонения, предоставляющих возможность получить, по меньшей мере, одну первую непрерывную кривую (20В), соединяющую вместе упомянутые первые характерные знаки.
10. Способ по п.7, в котором учитывают количество траекторий уклонения, предоставляющих возможность получить, по меньшей мере, одну вторую непрерывную кривую (19В), соединяющую вместе упомянутые вторые характерные знаки.
11. Способ по п.6, в котором:
для каждой траектории (Т1…Т5) уклонения определяют оценку, которая относится к, по меньшей мере, одному предопределенному критерию;
определенные таким образом оценки сравнивают друг с другом и
в зависимости от этого сравнения выбирают и выделяют одну из упомянутых траекторий уклонения.
12. Способ по п.1, в котором упомянутый первый предельный угол соответствует максимальному углу пикирования воздушного судна (А), по которому оно может снижаться до применения набора высоты с полностью отклоненной назад ручкой на максимальной мощности, чтобы иметь возможность пролететь над упомянутой местностью (5).
13. Способ по п.12, в котором первый характерный знак (SC), отображающий упомянутый предельный угол, приспосабливают к профилю местности (5).
14. Способ по п.12, в котором, когда упомянутый первый характерный знак (SC) достигает символа (11), иллюстрирующего вектор путевой скорости, издается тревожный сигнал.
15. Способ по п.12, в котором:
на этапе с), сверх того, определяют наибольший угол набора высоты, по которому способно лететь воздушное судно (А); и
на этапе d) на просмотровом экране (9) представляют вспомогательный знак (28), отображающий этот наибольший угол набора высоты.
16. Способ по п.12, в котором, когда воздушное судно (А) выполняет поворот:
на этапе с), сверх того, определяют вспомогательный предельный угол, который соответствует максимальному углу пикирования воздушного судна (А), по которому оно может снижаться до выравнивания и последующего применения набора высоты с полностью отклоненной назад ручкой на максимальной мощности, чтобы иметь возможность пролететь над упомянутой местностью (5); и
на этапе d) на просмотровом экране (9) представляют вспомогательный знак (29), отображающий этот вспомогательный предельный угол.
17. Способ по п.12, в котором когда воздушное судно (А) поворачивает и выровнять воздушное судно (А) не представляется возможным, то издается соответствующий тревожный сигнал.
18. Способ по п.12, в котором, когда воздушное судно (А) поворачивает, на просмотровом экране (9) представляют индикацию (31) крена, которая указывает пилоту крен, который необходимо приложить, чтобы сохранить заданную траекторию.
19. Способ по п.12, в котором:
на этапе а) определяют множество траекторий (Т1…Т5) уклонения, каждая из которых содержит различные повороты;
на этапе b) определяют профили местности (5) под этими траекториями (Т1…Т5) уклонения;
на этапе с) определяют множество первых предельных углов, связанных соответственно с упомянутым множеством траекторий (Т1…Т5) уклонения; и
на этапе d) на просмотровом экране (9) представляют множество первых характерных знаков (SC), отображающих упомянутое множество первых предельных углов соответственно, причем упомянутую угловую шкалу представляют вертикально, а упомянутые первые характерные знаки (SC) представляют горизонтально рядом друг с другом в зависимости от направления и величины соответствующего поворота.
20. Способ по п.1, в котором упомянутый просмотровый экран (9) является экраном просмотрового устройства коллиматорного индикатора на лобовом стекле.
21. Способ по п.1, в котором представляется возможность удалить отображение первых характерных знаков, представленных на этапе d).
22. Система для содействия пилотированию воздушного судна, летящего на малой высоте, которая содержит:
первое средство (2) для определения, по меньшей мере, одной траектории (Т1…Т5) уклонения, по меньшей мере, на предопределенном расстоянии (D) перед воздушным судном (А), причем упомянутая траектория (Т1…Т5) уклонения соответствует боковой траектории на малой высоте и содержит, по меньшей мере, один боковой поворот (φ1…φ5);
второе средство (3) для определения профиля местности (5), находящейся под этой траекторией (Т1…Т5) уклонения;
третье средство (6) для определения - в зависимости от упомянутого профиля местности (5) - по меньшей мере, одного первого предельного угла, соответствующего углу, по которому должно лететь воздушное судно (А), чтобы иметь возможность пролететь над упомянутой местностью (5) по всему упомянутому предопределенному расстоянию (D) вдоль упомянутой траектории (Т1…Т5) уклонения; и
средство отображения (8) для представления на просмотровом экране (9), по меньшей мере, одного первого характерного знака (S1…S5), который отображает упомянутый первый предельный угол и который связан с угловой шкалой (10), с которой также связан символ (11), иллюстрирующий вектор путевой скорости воздушного судна (А).
23. Система по п.22, в которой упомянутое третье средство (6) сформировано, чтобы определять первый предельный угол, который соответствует минимальному углу, по которому должно лететь воздушное судно (А), чтобы иметь возможность пролететь над упомянутой местностью (5) по всему упомянутому предопределенному расстоянию (D) вдоль упомянутой траектории (Т1…Т5) уклонения, независимо от летно-технических характеристик упомянутого воздушного судна (А).
24. Система по п.23, в которой:
упомянутая система (1), сверх того, содержит четвертое средство (12) для определения - в зависимости от предопределенных условий полета и фактических летно-технических характеристик упомянутого воздушного судна (А) - по меньшей мере, одного второго предельного угла, соответствующего максимальному углу, по которому может лететь воздушное судно (А); и
упомянутое средство (8) отображения представляет на просмотровом экране (9), по меньшей мере, один второй характерный знак (С1…С5), который отображает упомянутый второй предельный угол и который также связан с упомянутой угловой шкалой (10).
25. Система по п.23, в которой:
упомянутое первое средство (2) определяет множество траекторий (Т1…Т5) уклонения, каждая из которых содержит различный поворот (φ1…φ5);
упомянутое второе средство определяет профили местности (5) под этими траекториями (Т1…Т5) уклонения;
упомянутое третье средство (6) определяет множество первых предельных углов, связанных соответственно с упомянутым множеством траекторий (Т1…Т5) уклонения; и
упомянутое средство (8) отображения представляет на просмотровом экране (9) множество первых характерных знаков (S1…S5), отображающих соответственно упомянутое множество первых предельных углов, причем упомянутую угловую шкалу (10) представляют вертикально, а упомянутые первые характерные знаки (S1…S5) представляют горизонтально рядом друг с другом в зависимости от направления и величины соответствующего поворота (φ1…φ5).
26. Система по п.24, в которой:
упомянутое четвертое средство (12) определяет множество вторых предельных углов, связанных соответственно с упомянутым множеством траекторий (Т1…Т5) уклонения; и
упомянутое средство (8) отображения представляет на просмотровом экране (9) множество вторых характерных знаков (С1…С5), отображающих соответственно упомянутое множествовторых предельных углов, причем упомянутые вторые характерные знаки (С1…С5) представляют горизонтально рядом друг с другом в зависимости от направления и величины соответствующего поворота (φ1…φ5), так что первый и второй характерные знаки, которые связаны с одной и той же траекторией уклонения, располагаются горизонтально на одном уровне.
27. Система по п.22, в которой упомянутое третье средство (6) сформировано, чтобы определять упомянутый первый предельный угол, который соответствует максимальному углу пикирования воздушного судна (А), по которому оно может снижаться до применения набора высоты с полностью отклоненной назад ручкой на максимальной мощности, чтобы иметь возможность пролететь над упомянутой местностью (5).
28. Система по п.22, в которой упомянутое средство (8) отображения содержит просмотровое устройство коллиматорного индикатора на лобовом стекле, которое содержит упомянутый просмотровый экран (9).
29. Система по п.22, которая, кроме того, содержит средство (22) управления, предоставляющее возможность генерировать и удалять отображение первых характерных знаков (S1…S5) на упомянутом просмотровом экране (9).
30. Воздушное судно, которое содержит систему (1), способную осуществлять способ по п.1.
31. Воздушное судно, которое содержит систему (1) по п.22.
| Способ сушки и консервирования дерева | 1933 |
|
SU39960A1 |
| Приспособление для сигнализации при обрыве нити | 1933 |
|
SU44842A1 |
| WO 2004084152 A2, 30.09.2004 | |||
| WO 8503566 A1, 15.08.1985. | |||

