Координатный стол относится к устройствам точной механики и может быть использован в системах сближения зонда и образца в сканирующей зондовой микроскопии.
Известен координатный стол, содержащий первый базовый элемент с первой направляющей по первой координате X, на котором установлен второй базовый элемент со второй направляющей по первой координате X и третий базовый элемент с третьей направляющей 6 по первой координате X, содержащий также каретку с четвертыми направляющими по первой координате X, пятыми направляющими по первой координате X и шестыми направляющими по первой координате X, при этом первая направляющая сопряжена с четвертыми направляющими, вторая направляющая сопряжена с пятыми направляющими, а третья направляющая сопряжена с шестыми направляющими, содержащий также привод по первой координате X с толкателем, имеющим первую продольную ось, расположенную вдоль первой координаты, и содержащий также пружинный элемент, имеющий вторую продольную ось, расположенную вдоль первой координаты X, закрепленный на первом базовом элементе и сопряженный с кареткой, причем толкатель сопряжен с кареткой по поверхности контакта в первой точке контакта, а пружинный элемент сопряжен с кареткой во второй точке контакта (Патент RU 2255321). Это устройство выбрано в качестве прототипа предложенного решения.
Недостатки этого устройства заключаются в низкой точности перемещения, связанной с повышенными зазорами в люфтах между направляющими.
Задача изобретения заключается в обеспечении гарантированного бесконтактного сближения зонда и образца в сканирующей зондовой микроскопии.
Технический результат изобретения заключается в повышении точности перемещения каретки координатного стола.
Указанный технический результат достигается тем, что в координатном столе, содержащем первый базовый элемент с первой направляющей по первой координате X, на котором установлен второй базовый элемент со второй направляющей по первой координате X и третий базовый элемент с третьей направляющей 6 по первой координате X, содержащий также каретку с четвертыми направляющими по первой координате X, пятыми направляющими по первой координате X и шестыми направляющими по первой координате X, при этом первая направляющая сопряжена с четвертыми направляющими, вторая направляющая сопряжена с пятыми направляющими, а третья направляющая сопряжена с шестыми направляющими, содержащий также привод по первой координате X с толкателем, имеющим первую продольную ось, расположенную вдоль первой координаты, и содержащий также пружинный элемент, имеющий вторую продольную ось, расположенную вдоль первой координаты X, закрепленный на первом базовом элементе и сопряженный с кареткой, причем толкатель сопряжен с кареткой по поверхности контакта в первой точке контакта, а пружинный элемент сопряжен с кареткой во второй точке контакта, первая точка контакта толкателя и вторая точка контакта разнесены по третьей координате Z, перпендикулярной поверхности, образованной первой координатой X и второй координатой Y, при этом вторая направляющая и третья направляющая обращены навстречу друг другу, а угол α между ними находится в диапазоне 1-179°.
Существует вариант, в котором вторая направляющая расположена под углом β к первой направляющей, а третья направляющая расположена под углом γ к первой направляющей, при этом угол β не равен углу γ.
Существует также вариант, в котором четвертые направляющие включают первую пару вкладышей и вторую пару вкладышей, разнесенных по первой координате X и сопряженных с первой направляющей, пятые направляющие включают пятый вкладыш и шестой вкладыш, разнесенные по первой координате X и сопряженные со второй направляющей, шестые направляющие включают седьмой вкладыш и восьмой вкладыш, разнесенные по первой координате X и сопряженные с третьей направляющей.
Существует также вариант, в котором модуль упругости материала первой пары вкладышей, дальней от первой точки контакта, превышает модуль упругости второй пары вкладышей, а модули упругости шестого вкладыша и восьмого вкладыша, ближних к первой точке контакта, превышают модули упругости пятого вкладыша и седьмого вкладыша, при этом первая точка контакта расположена дальше от первой направляющей, чем вторая точка контакта.
Существует также вариант, в котором вторая пара вкладышей, пятый вкладыш и седьмой вкладыш подпружинены соответственно относительно первой направляющей, второй направляющей и третьей направляющей.
Существует также вариант, в котором толкатель выполнен с возможностью вращения вокруг первой продольной оси и имеет сферический торец, взаимодействующий с поверхностью контакта, а поверхность контакта расположена под углом η к первой продольной оси толкателя и перпендикулярна плоскости XZ, причем первая точка контакта смещена по координате X относительно второй точки контакта в положительном направлении на большую величину и угол η меньше 90°, при этом существует смещение  по координате Z между первой продольной осью и первой точкой контакта.
по координате Z между первой продольной осью и первой точкой контакта.
Существует также вариант, в котором толкатель выполнен с возможностью вращения вокруг первой продольной оси и имеет сферический торец, взаимодействующий с поверхностью, а поверхность контакта каретки расположена под углом ε к первой продольной оси толкателя и перпендикулярна плоскости XY, при этом существует смещение с по координате Y между первой продольной осью и первой точкой контакта.
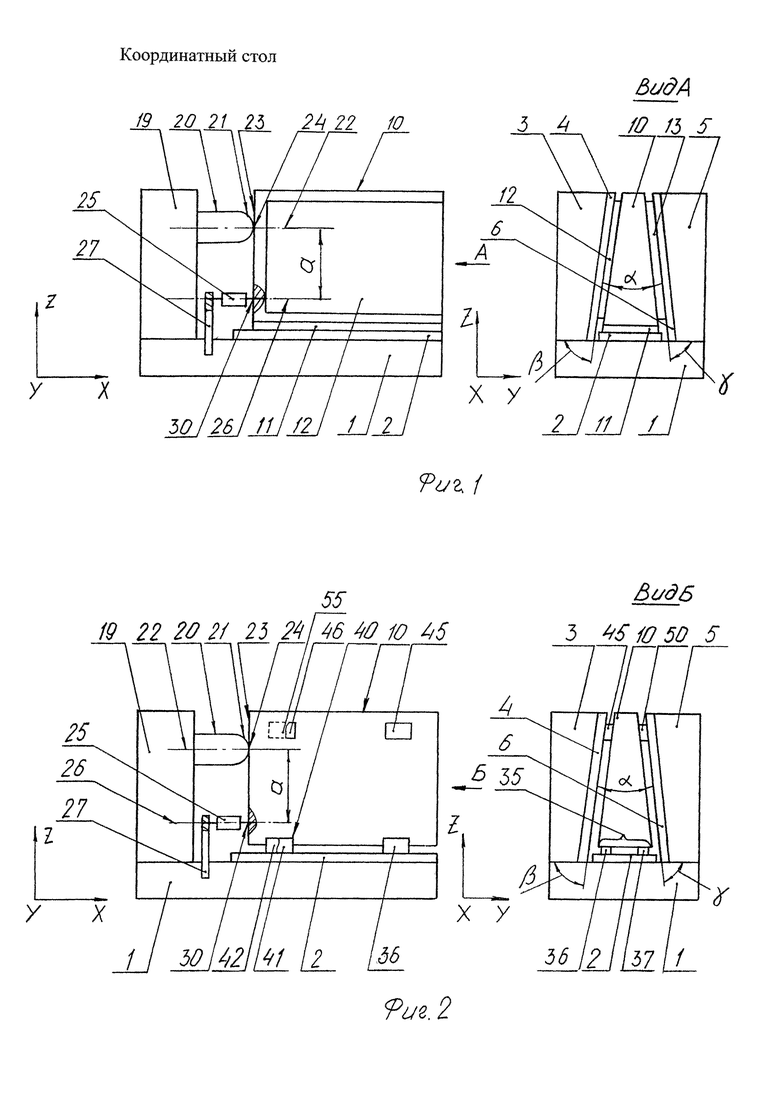
На фиг. 1 изображен общий вид координатного стола.
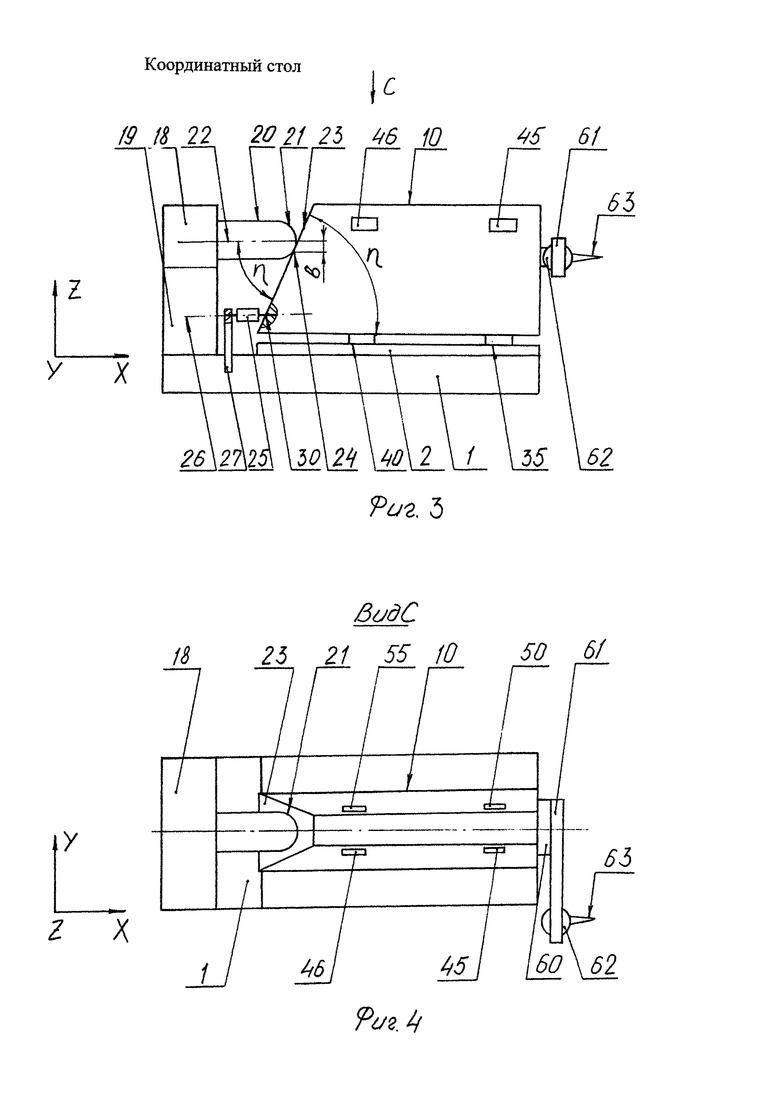
На фиг. 2 изображен вариант координатного стола с направляющими, выполненными в виде вкладышей.
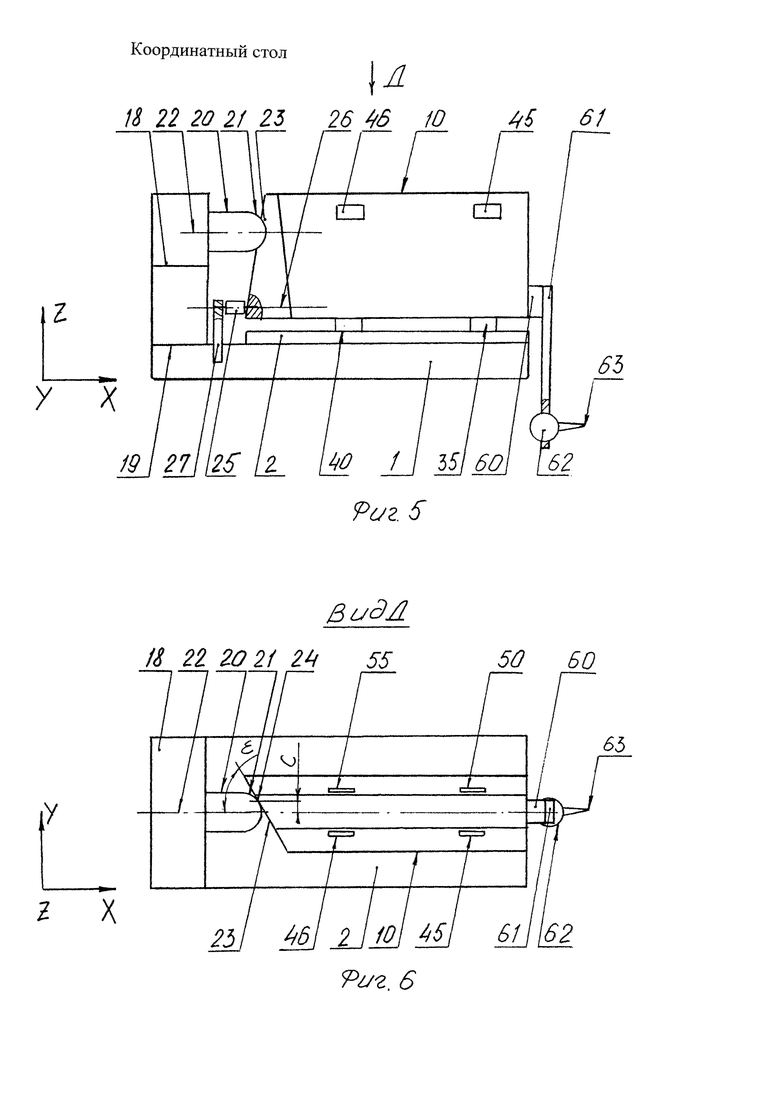
На фиг. 3 - фиг. 6 изображены различные варианты координатного стола с угловым расположением поверхности контакта с толкателем по отношению к направлению перемещения.
Координатный стол содержит первый базовый элемент 1 с первой направляющей 2 по первой координате X, на котором установлен второй базовый элемент 3 со второй направляющей 4 по первой координате X и третий базовый элемент 5 с третьей направляющей 6 по первой координате X. Второй базовый элемент 3 и третий базовый элемент 5 могут быть закреплены на первом базовом элементе 1 посредством крепежных винтов (не показаны). Первая направляющая 2, вторая направляющая 4 и третья направляющая 6 могут быть закреплены на соответствующем базовом элементе посредством клея (эпоксидной смолы). Координатный стол содержит также каретку 10 с четвертыми направляющими 11 по первой координате X, пятыми направляющими 12 по первой координате X и шестыми направляющими 13 по первой координате X, закрепленными на каретке 10 посредством клея (эпоксидной смолы). Материалом всех направляющих может служить поликор. Возможен вариант, в котором пары трущихся направляющих могут быть поликор - сталь ШХ15. Стальные направляющие на соответствующем базовом элементе или каретке 10 могут быть закреплены винтами. Первая направляющая 2 сопряжена с четвертыми направляющими 11, вторая направляющая 4 сопряжена с пятыми направляющими 12, а третья направляющая 6 сопряжена с шестыми направляющими 13. Для обеспечения безлюфтового сопряжения каретки 10 с базовыми элементами можно использовать подвижки второго базового элемента 3 и третьего базового элемента 5 в зазорах крепежных винтов (не показано). Координатный стол содержит также привод 19 по первой координате X с толкателем 20, имеющим первую продольную ось 22, расположенную вдоль первой координаты X. В качестве привода 19 можно использовать шаговый двигатель. Координатный стол содержит также пружинный элемент 25, имеющий вторую продольную ось 26, расположенную вдоль первой координаты X, закрепленный на первом базовом элементе 1 и сопряженный с кареткой 10. В качестве пружинного элемента 25 можно использовать стальную пружину растяжения. Толкатель 20 сопряжен с кареткой 10 по поверхности контакта 23 в первой точке контакта 24, а пружинный элемент 25 сопряжен с кареткой 10 во второй точке контакта 30. При этом первая точка контакта 24 толкателя 20 и вторая точка контакта 30 разнесены по третьей координате Z, перпендикулярной поверхности, образованной первой координатой X и второй координатой Y на величину а. Причем вторая направляющая 4 и третья направляющая 5 обращены навстречу друг другу, а угол α между ними находится в диапазоне 1-179°.
Существует вариант, в котором вторая направляющая 4 расположена под углом β к первой направляющей 2 (фиг. 2), а третья направляющая 6 расположена под углом γ к первой направляющей 2, при этом угол β может быть не равен углу γ.
Существует также вариант, в котором четвертые направляющие 11 включают первую пару вкладышей 35 и вторую пару вкладышей 40, разнесенных по первой координате X и сопряженных с первой направляющей 2. Пятые направляющие 12 включают пятый вкладыш 45 и шестой вкладыш 46, разнесенные по первой координате X и сопряженные со второй направляющей 4, шестые направляющие 13 включают седьмой вкладыш 50 и восьмой вкладыш 55, разнесенные по первой координате X и сопряженные с третьей направляющей 6. Вкладыши могут быть изготовлены из бронзы и закреплены в каретке 10 посредством эпоксидной смолы.
Существует также вариант, в котором модуль упругости материала первой пары вкладышей 35, дальней от первой точки контакта 24, превышает модуль упругости второй пары вкладышей 40. При этом модули упругости шестого вкладыша 46 и восьмого вкладыша 55, ближних к первой точке контакта 24, превышают модули упругости пятого вкладыша 45 и седьмого вкладыша 50. В качестве материала первой пары вкладышей 35, шестого вкладыша 46 и восьмого вкладыша 55 можно использовать бронзу. В качестве материала второй пары вкладышей 40, пятого вкладыша 45 и седьмого вкладыша 50 можно использовать фторопласт.
Существует также вариант, в котором вторая пара вкладышей 40, пятый вкладыш 45 и седьмой вкладыш 50 подпружинены соответственно относительно первой направляющей 2, второй направляющей 4 и третьей направляющей 6. В этом случае эти направляющие могут быть изготовлены из капролона и с натягом установлены в координатный стол. Возможен также вариант, в котором между этими вкладышами и кареткой 10 установлены витоновые эластичные прокладки толщиной 1-3 мм (не показаны).
Существует также вариант, в котором толкатель 20 выполнен с возможностью вращения вокруг первой продольной оси 22 (фиг. 3 - фиг. 4) и имеет сферический торец 21, взаимодействующий с поверхностью контакта 23. При этом поверхность контакта 23 расположена под углом η к первой продольной оси 22 толкателя 20 и перпендикулярна плоскости XZ. Причем первая точка контакта 24 смещена по координате X относительно второй точки контакта 30 в положительном направлении на большую величину и угол η меньше 90°. При этом существует смещение в по координате Z между первой продольной осью 22 и первой точкой контакта 24. На каретке 10 может быть установлен через переходник 60 не симметричный продольной оси 22 рычаг 61 с зондом 62, включающий острие 63.
Существует также вариант, в котором толкатель 20 выполнен с возможностью вращения вокруг первой продольной оси 22 (фиг. 5 - фиг. 6) и имеет сферический торец 21, взаимодействующий с поверхностью 23. При этом поверхность контакта 23 каретки 10 расположена под углом ε к первой продольной оси 22 толкателя 20 и перпендикулярна плоскости XY. Причем существует смещение с по координате Y между первой продольной осью 22 и первой точкой контакта 24. На каретке 10 может быть установлен через переходник 60 рычаг 61 с зондом 62, включающий острие 63.
Координатный стол работает следующим образом. Включают привод 19. Толкатель 20, выдвигаясь в положительном направлении по координате X, осуществляет перемещение каретки 10 по координате X в этом же направлении. При перемещении толкателя 20 в отрицательном направлении по координате X за счет использования пружинного элемента 25 возникает поджим каретки 10 к толкателю 20 и происходит перемещение каретки 10 в отрицательном направлении по координате X. Пружинный элемент 25 в процессе перемещения каретки 10 в положительном направлении по координате X создает перекос (поворот) каретки 10 в плоскости XZ против часовой стрелки, тем самым выбирая люфты между направляющими. При перемещении каретки 10 в отрицательном направлении по координате X этот перекос и выбор люфтов между направляющими сохраняется.
То, что первая точка контакта 24 толкателя 20 и вторая точка контакта 30 разнесены по третьей координате Z, перпендикулярной поверхности, образованной первой координатой X и второй координатой Y, создает принудительный перекос каретки 10 в плоскости XZ по часовой стрелке и устранение люфтов между направляющими при перемещении каретки. Это повышает точность перемещения каретки 10. То, что направляющая 4 и третья направляющая 5 обращены навстречу друг другу, а угол α между ними находится в диапазоне 1-179°, позволяет в каждом конкретном случае выбирать оптимальный угол для большей точности перемещения каретки 10. Например, если на каретке 10 закрепляют крупногабаритный и массивный образец, угол α целесообразно выбирать более 90°, а если на каретке закрепляют зонд 62 сканирующего зондового микроскопа, вес которого часто не превышает одного грамм, то угол α может быть менее 90°.
То, что вторая направляющая 4 расположена под углом β к первой направляющей 2, а третья направляющая 6 расположена под углом γ к первой направляющей 2, при этом угол β не равен углу γ, позволяет выбирать оптимальное соотношение этих углов при различных нагрузках по координате Y и повышает точность перемещения каретки 10. Если нагрузка направлена по координате Y в положительном направлении (фиг. 1, фиг. 2), то угол β должен быть меньше угла γ.
Четвертые направляющие 11 включают первую пару вкладышей 35 и вторую пару вкладышей 40, разнесенных по первой координате X и сопряженных с первой направляющей 2, пятые направляющие 12 включают пятый вкладыш 45 и шестой вкладыш 46, разнесенные по первой координате X и сопряженные со второй направляющей 4, шестые направляющие 13 включают седьмой вкладыш 50 и восьмой вкладыш 55, разнесенные по первой координате X и сопряженные с третьей направляющей 6. Выполнение направляющих в виде вкладышей минимизирует люфты при перемещении каретки 10 и повышает точность ее перемещения.
То, что модуль упругости материала первой пары вкладышей 35, дальней от первой точки контакта 24, превышает модуль упругости второй пары вкладышей 40, а модули упругости шестого вкладыша 46 и восьмого вкладыша 55, ближних к первой точке контакта 24, превышают модули упругости пятого вкладыша 45 и седьмого вкладыша 50, минимизирует люфты при перемещении каретки 10 и повышает точность ее перемещения.
То, что вторая пара вкладышей 40, пятый вкладыш 45 и седьмой вкладыш 50 подпружинены соответственно относительно первой направляющей 2, второй направляющей 4 и третьей направляющей 6, минимизирует люфты при перемещении каретки 10 и повышает точность ее перемещения.
То, что толкатель 20 выполнен с возможностью вращения вокруг первой продольной оси 22 и имеет сферический торец 21, взаимодействующий с поверхностью контакта 23, а поверхность контакта 23 расположена под углом η к первой продольной оси 22 толкателя 20, за счет трения в точке контакта 24 разворачивает в пределах люфтов направляющих каретку 10 по часовой стрелке в плоскости YZ (фиг. 4) при вращении толкателя 20 по часовой стрелке. Это повышает точность перемещения каретки 10, сопряженной с не симметричным продольной оси 22 рычагом 51. В этом случае при остановке каретки 10 минимизируется упругий довод зонда 62 по координате X (доворот в плоскости XY) за счет релаксации накопившихся напряжений. Это исключает несанкционированное касание острия 63 с измеряемым в СЗМ образцом (не показаны).
То, что толкатель 20 выполнен с возможностью вращения вокруг первой продольной оси 22 и имеет сферический торец 21, взаимодействующий с поверхностью контакта 2323, а поверхность контакта 23 каретки 10 расположена под углом ε к первой продольной оси 22 толкателя 20, за счет трения в точке контакта 24 разворачивает в пределах люфтов направляющих каретку 10 против часовой стрелки (фиг. 5) в плоскости XZ при вращении толкателя 20 против часовой стрелки. Это повышает точность перемещения каретки 10, сопряженной с не симметричным продольной оси 22 рычагом 51. В этом случае при остановке каретки 10 минимизируется упругий довод зонда 62 по координате X (доворот в плоскости XZ) за счет релаксации накопившихся напряжений. Это исключает несанкционированное касание острия 63 с измеряемым в СЗМ образцом (не показаны).
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХКООРДИНАТНЫЙ МИКРОПОЗИЦИОНЕР | 2006 |
|
RU2306621C1 |
| УСТРОЙСТВО ПОДВИЖКИ ОБРАЗЦА | 2005 |
|
RU2377620C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП, СОВМЕЩЕННЫЙ С УСТРОЙСТВОМ МОДИФИКАЦИИ ПОВЕРХНОСТИ ОБЪЕКТА | 2012 |
|
RU2572522C2 |
| КООРДИНАТНЫЙ СТОЛ | 2003 |
|
RU2255321C1 |
| МНОГОФУНКЦИОНАЛЬНЫЙ СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП | 2010 |
|
RU2498321C2 |
| СКАНИРУЮЩИЙ ЗОНДОВЫЙ МИКРОСКОП ДЛЯ ИССЛЕДОВАНИЯ КРУПНОГАБАРИТНЫХ ОБЪЕКТОВ | 2010 |
|
RU2515731C2 |
| УСТРОЙСТВО ПРЕЦИЗИОННОГО ПЕРЕМЕЩЕНИЯ | 2013 |
|
RU2537363C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ МОДУЛЬ ЗАПОМИНАЮЩЕГО УСТРОЙСТВА СВЕРХВЫСОКОЙ (ТЕРАБИТНОЙ) ЕМКОСТИ | 2002 |
|
RU2242054C2 |
| МАЛОГАБАРИТНЫЙ АКУСТИЧЕСКИЙ МИКРОСКОП | 1995 |
|
RU2112969C1 |
| КООРДИНАТНЫЙ СТОЛ | 1992 |
|
RU2029447C1 |
Изобретение относится к устройствам точной механики и может быть использовано в системах сближения зонда и образца в сканирующей зондовой микроскопии. Координатный стол содержит первый базовый элемент 1 с первой направляющей 2 по первой координате X, на котором установлен второй базовый элемент 3 со второй направляющей 4 по первой координате X и третий базовый элемент 5 с третьей направляющей 6 по первой координате X. Третий базовый элемент 5 содержит также каретку 10 с четвертыми направляющими 11 по первой координате X, пятыми направляющими 12 по первой координате X и шестыми направляющими 13 по первой координате X. Первая направляющая 2 сопряжена с четвертыми направляющими 11, вторая направляющая 4 сопряжена с пятыми направляющими 12, а третья направляющая 6 сопряжена с шестыми направляющими 13. Координатный стол содержит также привод 19 по первой координате X с толкателем 20, имеющим первую продольную ось 22, расположенную вдоль первой координаты X, и содержащий также пружинный элемент 25. При этом пружинный элемент 25 имеет вторую продольную ось 26, расположенную вдоль первой координаты X, и закреплен на первом базовом элементе 1 и сопряжен с кареткой 10. Толкатель 20 сопряжен с кареткой 10 по поверхности контакта 23 в первой точке контакта 24. Пружинный элемент 25 сопряжен с кареткой 10 во второй точке контакта 30. Первая точка контакта 24 толкателя 20 и вторая точка контакта 30 разнесены по третьей координате Z, перпендикулярной поверхности, образованной первой координатой X и второй координатой Y. При этом вторая направляющая 4 и третья направляющая 5 обращены навстречу друг другу, а угол α между ними находится в диапазоне 1-179°. Обеспечивается повышение точности перемещения координатного стола. 6 з.п. ф-лы, 6 ил.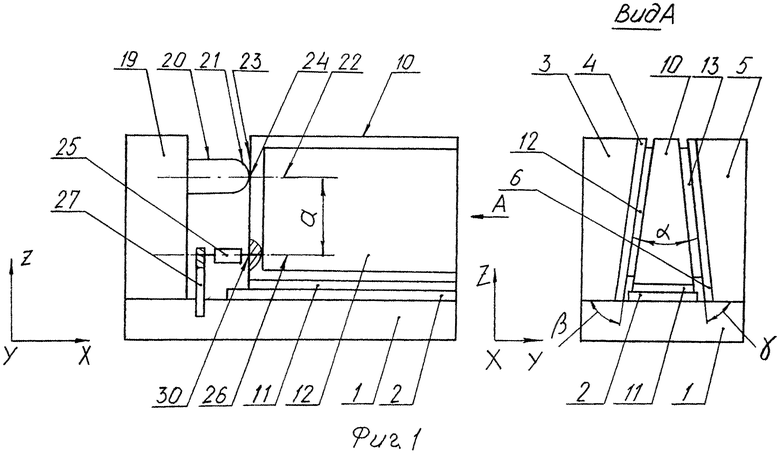
1. Координатный стол, содержащий первый базовый элемент (1) с первой направляющей (2) по первой координате X, на котором установлены второй базовый элемент (3) со второй направляющей (4) по первой координате X и третий базовый элемент (5) с третьей направляющей (6) по первой координате X, содержащий также каретку (10) с четвертыми направляющими (11) по первой координате X, пятыми направляющими (12) по первой координате X и шестыми направляющими (13) по первой координате X, при этом первая направляющая (2) сопряжена с четвертыми направляющими (11), вторая направляющая (4) сопряжена с пятыми направляющими (12), а третья направляющая (6) сопряжена с шестыми направляющими (13), содержащий также привод (19) по первой координате X с толкателем (20), имеющим первую продольную ось (22), расположенную вдоль первой координаты X, и содержащий также пружинный элемент (25), имеющий вторую продольную ось (26), расположенную вдоль первой координаты X, закрепленный на первом базовом элементе (1) и сопряженный с кареткой (10), причем толкатель (20) сопряжен с кареткой (10) по поверхности контакта (23) в первой точке контакта (24), а пружинный элемент (25) сопряжен с кареткой (10) во второй точке контакта (30), отличающийся тем, что первая точка контакта (24) толкателя (20) и вторая точка контакта (30) разнесены по третьей координате Z, перпендикулярной поверхности, образованной первой координатой X и второй координатой Y, при этом вторая направляющая (4) и третья направляющая (5) обращены навстречу друг другу, а угол α между ними находится в диапазоне 1-179°.
2. Устройство по п. 1, отличающееся тем, что вторая направляющая (4) расположена под углом β к первой направляющей (2), а третья направляющая (6) расположена под углом γ к первой направляющей (2), при этом угол β не равен углу γ.
3. Устройство по п. 1, отличающееся тем, что четвертые направляющие (11) включают первую пару вкладышей (35) и вторую пару вкладышей (40), разнесенных по первой координате X и сопряженных с первой направляющей (2), пятые направляющие (12) включают пятый вкладыш (45) и шестой вкладыш (46), разнесенные по первой координате X и сопряженные со второй направляющей (4), шестые направляющие (13) включают седьмой вкладыш (50) и восьмой вкладыш (55), разнесенные по первой координате X и сопряженные с третьей направляющей (6).
4. Устройство по п. 1, отличающееся тем, что толкатель (20) выполнен с возможностью вращения вокруг первой продольной оси (22) и имеет сферический торец (21), взаимодействующий с поверхностью контакта (23), а поверхность контакта (23) расположена под углом η к первой продольной оси (22) толкателя (20) и перпендикулярна плоскости XZ, причем первая точка контакта (24) смещена по координате X относительно второй точки контакта (30) в положительном направлении на большую величину, и угол η меньше 90°, при этом существует смещение в по координате Z между первой продольной осью (22) и первой точкой контакта (24).
5. Устройство по п. 1, отличающееся тем, что толкатель (20) выполнен с возможностью вращения вокруг первой продольной оси (22) и имеет сферический торец (21), взаимодействующий с поверхностью (23), а поверхность контакта (23) каретки (10) расположена под углом ε к первой продольной оси (22) толкателя (20) и перпендикулярна плоскости XY, при этом существует смещение с по координате Y между первой продольной осью (22) и первой точкой контакта (24).
6. Устройство по п. 3, отличающееся тем, что модуль упругости материала первой пары вкладышей (35), дальней от первой точки контакта (24), превышает модуль упругости второй пары вкладышей (40), а модули упругости шестого вкладыша (46) и восьмого вкладыша (55), ближних к первой точке контакта (24), превышают модули упругости пятого вкладыша (45) и седьмого вкладыша (50), при этом первая точка контакта (24) расположена дальше от первой направляющей (2), чем вторая точка контакта (30).
7. Устройство по п. 3, отличающееся тем, что вторая пара вкладышей (40), пятый вкладыш (45) и седьмой вкладыш (50) подпружинены соответственно относительно первой направляющей (2), второй направляющей (4) и третьей направляющей (6).
| КООРДИНАТНЫЙ СТОЛ | 2003 |
|
RU2255321C1 |
| КООРДИНАТНЫЙ СТОЛ | 2004 |
|
RU2254640C1 |
| Двухпозиционный предметный столик | 1985 |
|
SU1269075A1 |
| US 3835338 A, 10.09.1974 | |||
| Препаратоводитель для электронного микроскопа | 1977 |
|
SU686000A1 |

