Область техники
Настоящее изобретение относится к системам фазовой автоподстройки частоты (ФАПЧ). Более конкретно, настоящее изобретение относится к способу и устройству для улучшения характеристик захвата и синхронизации двухфазных систем ФАПЧ.
Система ФАПЧ представляет собой схему, которая эффективно отслеживает фазы входного сигнала и опорного сигнала. Обычная система ФАПЧ может быть описана как неиндуктивный настраиваемый активный фильтр с регулируемой шириной полосы. Если разность фаз между опорным сигналом и входным сигналом постоянна, то система ФАПЧ засинхронизирована. Если входной или опорный сигнал изменяет фазу, то фазовый детектор в системе ФАПЧ будет вырабатывать сигнал ошибки, который пропорционален величине и полярности изменения фазы. Этот сигнал ошибки вызывает изменение в фазе опорного сигнала, так что состояние синхронизации вновь восстанавливается. Системы ФАПЧ находят широкое применение, включая, в том числе, демодуляцию частотно-модулированного радиосигнала (так как аудиосигнал просто является сигналом ошибки), демодуляцию фазоманипулированного сигнала, синтез частот, синхронизацию данных, преобразование сигналов, регулирование скорости двигателя. В системах возбуждения генераторов тиристорные мосты используются для управления возбуждением генератора, и система ФАПЧ может быть использована для обеспечения управления посредством управляющих электродов тиристоров в тиристорных мостах.
Известные системы ФАПЧ не обеспечивают адекватной скорости и надежности, если фаза входного сигнала системы ФАПЧ реверсируется. Если имеет место относительно большое изменение фазы, то существующие системы ФАПЧ не могут работать удовлетворительным образом и обуславливают ошибку “ложной синхронизации”.
Угол между двумя синусоидальными сигналами может быть описан как арктангенс одного сигнала, деленного на другой. Системы ФАПЧ могут использовать сигнал ошибки, сформированный посредством этого математического соотношения, для улучшения характеристик синхронизации, но такие способы являются сложными с точки зрения вычислений, требуют корректировки и недостаточно надежны для некоторых применений.
Поэтому было бы весьма желательным улучшить характеристики захвата и синхронизации и диапазона в системе ФАПЧ, особенно для двухфазных систем ФАПЧ, таких как используемые в связи с системами возбуждения генераторов. Кроме того, было бы весьма желательным увеличить линейный диапазон работы системы ФАПЧ по сравнению с диапазоном 90 градусов, характерным для обычных систем ФАПЧ. Кроме того, было бы желательным обеспечить улучшенный захват синхронизма без превышения исходной ширины полосы системы ФАПЧ.
Сущность изобретения
Настоящее изобретение преодолевает вышеупомянутые проблемы, свойственные предшествующему уровню техники, и обеспечивает достижение дополнительных преимуществ за счет создания системы ФАПЧ и соответствующего ей способа, который улучшает характеристики захвата синхронизма простым с точки зрения вычислений и одновременно с этим надежным способом. В соответствии с возможными вариантами осуществления ошибка в системе ФАПЧ определяется путем выработки первого сигнала ed ошибки смещения, где ed=Vcos*Cos(phase)+Vsin*Sin(phase), и где Vcos и Vsin - синусоидальные сигналы напряжения, выработки квадратурного сигнала eq ошибки, где eq=-Vcos*Sin(phase)+Vsin*Cos(phase); выработки второго сигнала еc ошибки смещения, где еc=ed, если квадратурный сигнал ошибки eq меньше или равен нулю, и где еc=ed+3*eq, если ed больше или равно нулю и eq больше нуля и где еc=ed-3*eq, если ed меньше нуля и eq больше нуля; и определения ошибки системы ФАПЧ с использованием второго сигнала еc ошибки смещения.
Сигнал еc заменяет обычный сигнал ошибки ed для достижения улучшенных характеристик захвата и синхронизации системы ФАПЧ надежным и вместе с тем простым, с точки зрения вычислений, способом.
Краткое описание чертежей
Признаки и преимущества настоящего изобретения поясняются более детально в последующем подробном описании со ссылками на чертежи, на которых представлено следующее:
Фиг.1 - пример двухфазной системы ФАПЧ, в которой может быть использовано настоящее изобретение;
Фиг.2 - графическое представление характеристик ошибок системы ФАПЧ по фиг.1 с использованием традиционного способа синхронизации ФАПЧ;
Фиг.3 - графическое представление характеристик ошибок системы ФАПЧ по фиг.1 с использованием способа, соответствующего настоящему изобретению;
Фиг.4-7 - результаты математического моделирования с использованием программы моделирования MATLAB, иллюстрирующие сравнение традиционного способа синхронизации с вариантом осуществления настоящего изобретения.
Детальное описание изобретения
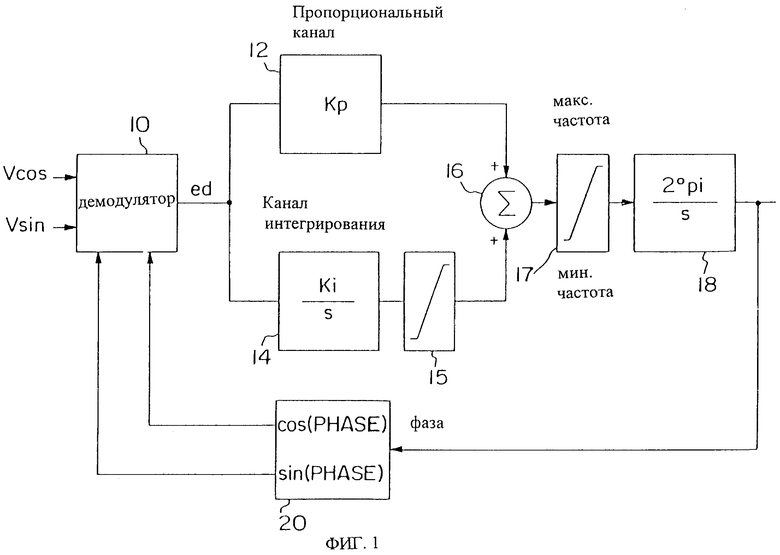
На фиг.1 представлена двухфазная система ФАПЧ, пригодная для реализации настоящего изобретения. Демодулятор 10 подсоединен для приема входных сигналов Vcos и Vsin, которые представляют собой синусоидальные сигналы напряжения, смещенные один относительно другого примерно на 90 градусов. Демодулятор 10 также подсоединен для приема косинусной и синусной составляющей сигналов фазы из цепи обратной связи, что описано ниже более детально. На основе этих входных сигналов демодулятор 10 вырабатывает сигнал ed ошибки, который в традиционной системе ФАПЧ определяется следующим образом:

т.е. демодулятор 10 вырабатывает и суммирует эти произведения и выдает на выходе результат в виде сигнала ed ошибки. Сигнал ed затем обрабатывается в двух отдельных параллельных каналах. В пропорциональном канале сигнал ed ошибки подается в качестве входного сигнала на усилитель 12, который линейным образом усиливает сигнал ed ошибки в соответствии с коэффициентом усиления Кр. Коэффициент усиления Кр устанавливается обычным образом, чтобы обеспечить требуемую ширину полосы для цепи фазовой синхронизации. В канале интегрирования сигнал ed ошибки подается на интегратор 14 (где s - оператор Лапласа), который интегрирует сигнал ошибки с использованием коэффициента интегрирования Ki. Коэффициент интегрирования Ki обычно устанавливается для достижения нулевой ошибки фазы в установившемся состоянии за требуемое время установления. Проинтегрированный сигнал ошибки может быть ограничен в ограничителе 15. Усиленный и проинтегрированный сигналы ошибки из пропорционального канала и канала интегрирования соответственно подаются в качестве входных сигналов на сумматор 16, который арифметически суммирует сигналы для выработки суммарного выходного сигнала. Суммарный выходной сигнал может быть ограничен в ограничителе 17 и затем подается на второй интегратор 18, который интегрирует суммарный выходной сигнал с использованием коэффициента интегрирования 2pi. Этот коэффициент интегрирования 2pi означает только масштабирование при переходе от герц к радианам в секунду. Проинтегрированный суммарный сигнал выдается в качестве выходного сигнала системы ФАПЧ и представляет ошибку фазы между входными синусоидальными сигналами.
Выходной сигнал системы ФАПЧ также подается в цепь обратной связи, как показано на фиг.1. Более конкретно, выходная фаза подается на блок 20 обработки, который генерирует косинусное и синусное значение выходного сигнала и подает косинусное и синусное значения в качестве входного сигнала на демодулятор 10. Косинусное и синусное значения используются для определения сигнала ошибки ed, как описано выше.
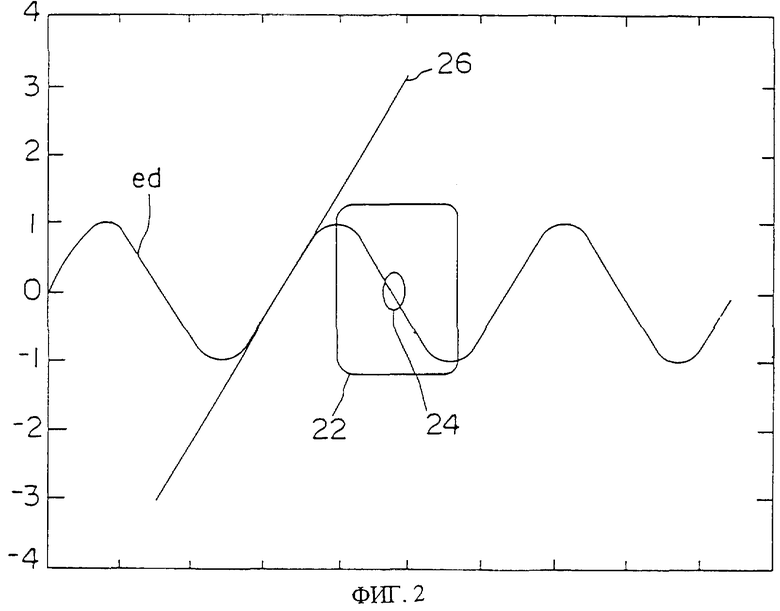
На фиг.2 представлено графическое представление характеристик ошибок цепи фазовой синхронизации по фиг.1. Сигнал ed является исходным непосредственным сигналом ошибки системы ФАПЧ и по своей природе является синусоидальным сигналом. Характеристики ошибок включают в себя неустойчивую область 22 и область 24, в которой можно ожидать относительно медленного восстановления в момент изменения фазы, поскольку в области 24 имеет место малая ошибка. Это определяется как “ложная синхронизация”. Желательная линейная характеристика 26 также представлена на фиг.2.
В соответствии с возможным вариантом осуществления изобретения характеристики захвата и синхронизации системы ФАПЧ, показанные на фиг.2, могут быть существенным образом улучшены за счет использования следующего способа. В дополнение к выработке первого сигнала ed ошибки смещения, как указано в уравнении (1) выше, вырабатывается квадратурный сигнал eq ошибки в соответствии с уравнением eq=-Vcos*Sin(phase)+Vsin*Cos(phase). С использованием этих двух сигналов ed и eq вырабатывается второй сигнал ес ошибки смещения (например, в демодуляторе 10 по фиг.1) в соответствии со следующими параметрами:
еc=ed, если eq≤0;
еc=ed+3eq, если ed≥0 и eq>0 и
еc=ed-3eq, если ed<0 и eq>0.
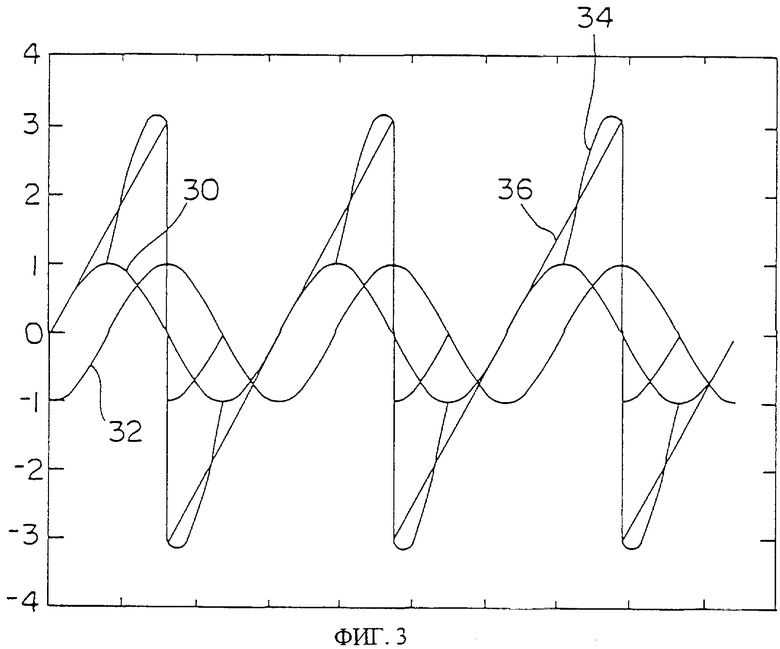
В соответствии с этим вариантом осуществления второй сигнал еc ошибки смещения заменяет первый сигнал ed ошибки смещения в соответствии с фиг.1. Второй сигнал еc ошибки смещения обеспечивает пример аппроксимации к идеальной или желательной линейной характеристике. Данный пример отличается простотой вычислений, но в то же время надежен и высоко эффективен, что иллюстрируется на фиг.3.
На фиг.3 показано графическое представление ошибки системы ФАПЧ по фиг.1 с использованием описанного способа. На фиг.3 показан первый сигнал ed ошибки смещения в виде сигнала 30, квадратурный сигнал eq ошибки в виде сигнала 32 и второй сигнал еc ошибки смещения в виде сигнала 34. Идеальный сигнал ошибки представлен как сигнал 36. Как видно из этого представления, второй сигнал ошибки смещения, хотя и относительно простой, точно аппроксимирует идеальный сигнал 36 ошибки.
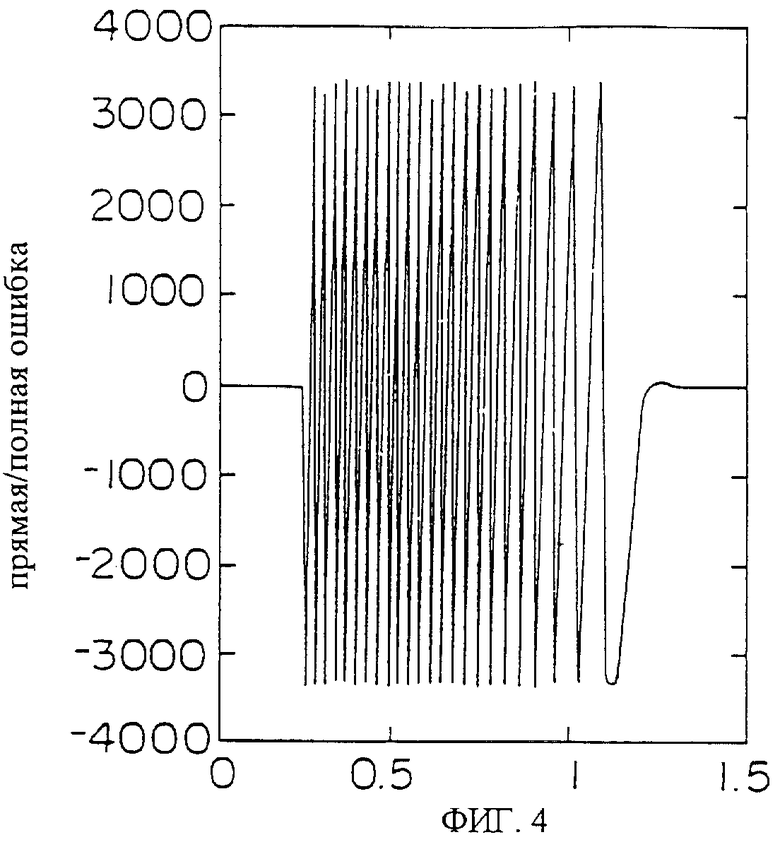
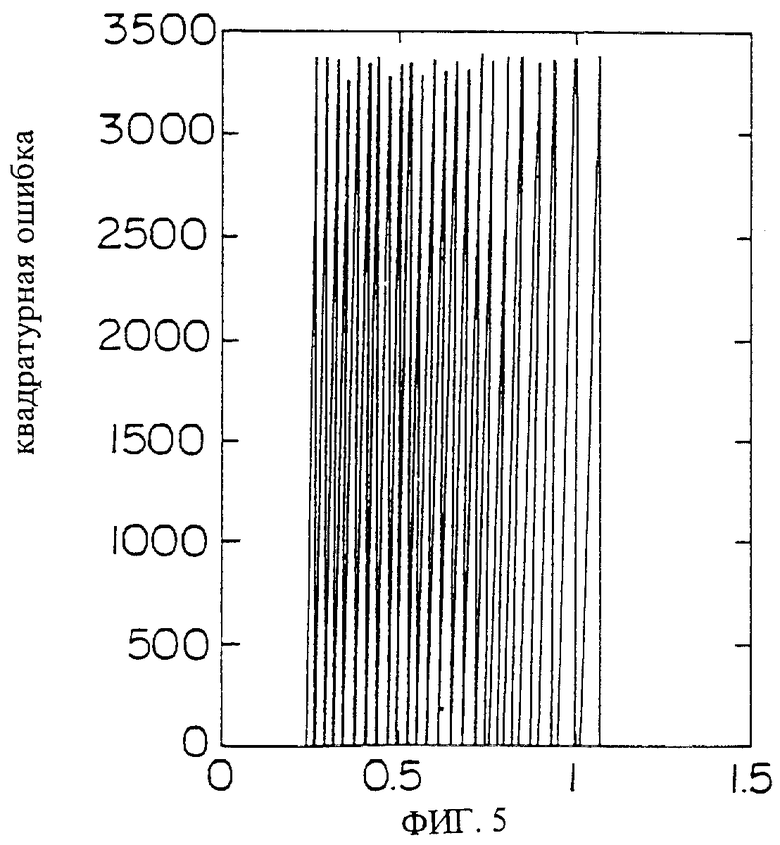
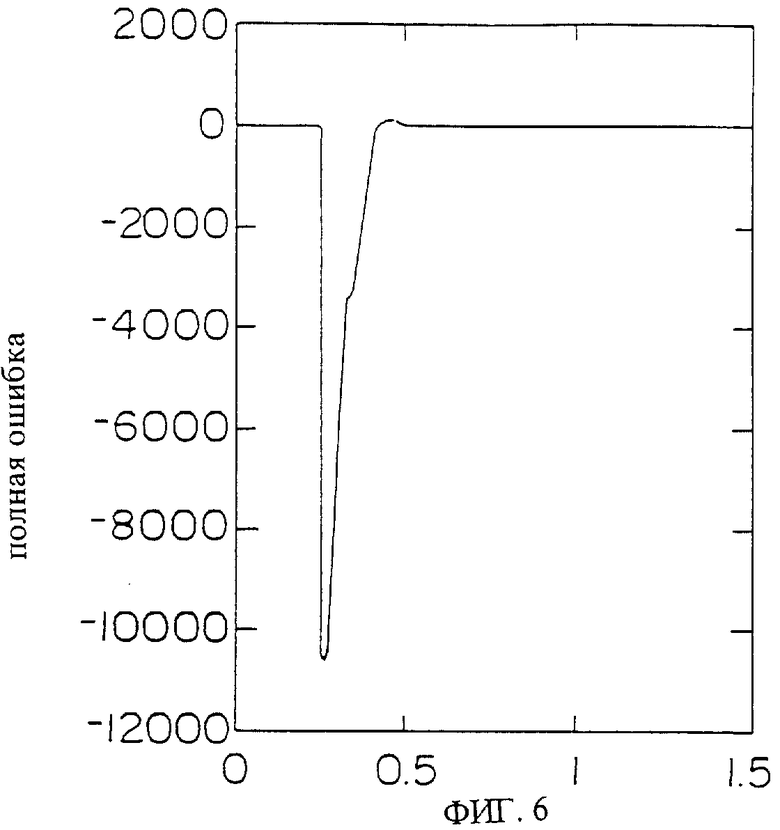
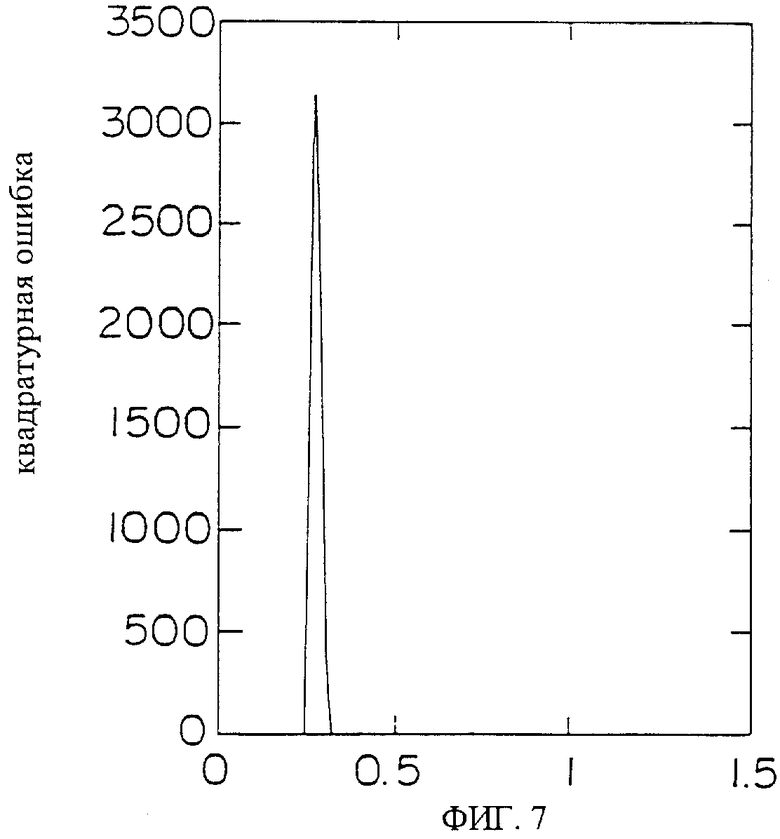
На фиг.4-7 представлены результаты математического моделирования с использованием программы моделирования MATLAB для системы ФАПЧ на частоте 60 Гц, устанавливающей канал интегрирования контроллера на 100 Гц. Фиг.4 показывает результат возмущения, внесенного в канал интегрирования системы ФАПЧ по фиг.1 с использованием только обычного сигнала ed ошибки смещения. На фиг.5 показан квадратурный сигнал ошибки для того же возмущения в той же самой системе ФАПЧ. На фиг.6 показан случай использования того же самого возмущения, полной ошибки для той же самой системы ФАПЧ с использованием второго сигнала еc ошибки смещения. На фиг.7 представлен, для того же возмущения, квадратурный сигнал ошибки в той же системе ФАПЧ. Следует заметить, что использование второго сигнала еc ошибки смещения значительно улучшает характеристики захвата и синхронизации одной и той же системы ФАПЧ в условиях большого сигнала в примере, иллюстрируемом на фиг.4-7. Следует также заметить, что использование второго сигнала еc ошибки смещения не существенно влияет на полную ошибку по сравнению с использованием только первого сигнала ed ошибки смещения, пока ошибка фазы не превышает примерно 90 градусов. Сигнал eq имеет отрицательное значение вплоть до этой точки 90 градусов и согласно приведенным выше объяснениям сигнал eq не используется для формирования части сигнала еc до тех пор, пока сигнал eq не станет положительным. Таким образом, второй сигнал еc ошибки смещения эффективным образом представляет дополнительный сигнал, который может быть использован для расширения линейного диапазона работы системы ФАПЧ за пределы, обеспечиваемые использованием только первого сигнала ed ошибки смещения.
Приведенное выше описание включает в себя множество детальных особенностей, которые не должны рассматриваться как ограничения изобретения. Многие из приведенных конкретных признаков могут варьироваться без изменения объема изобретения, как определено формулой изобретения и ее эквивалентами.
Изобретение относится к системам фазовой автоподстройки частоты. Достигаемый технический результат - улучшение характеристик захвата и синхронизации системы фазовой автоподстройки частоты (ФАПЧ), исключение ложной синхронизации. В способе определения ошибки в системе ФАПЧ вырабатываются первый сигнал ошибки смещения, квадратурный сигнал ошибки и второй сигнал ошибки смещения, определяют ошибку системы ФАПЧ с использованием второго сигнала ошибки смещения. Система ФАПЧ содержит демодулятор, усилитель-интегратор, сумматор, второй интегратор и цепь обратной связи. 4 н. и 10 з.п. ф-лы, 7 ил.
| US 5410573 А, 25.04.1995 | |||
| Устройство синхронизации с фазовой автоподстройкой частоты | 1988 |
|
SU1700751A1 |
| US 5742207 А, 21.04.1998 | |||
| US 4942371, 17.07.1990 | |||
| US 5939949 А, 17.08.1999 | |||
| Устройство для принудительного закрытия обратного клапана | 1978 |
|
SU779713A1 |

