Изобретение относится к радиолокации и может быть использовано для автоматизированной селекции объектов бронетанковой техники, на фоне мешающих отражений и помех, а также оснащенных средствами маскировки.
Известно достачное количество различных способов борьбы со средствами маскировки при сопровождении объектов бронетанковой техники противотанковыми ракетными комплексами с радиолокационной системой управления [1]. Недостатком данных способов является то, что они не учитывают влияния ошибки, вызванной угловым шумом, на точность пеленга протяженной цели при решении задач самонаведения на нее противотанковой управляемой ракеты. Поэтому необходимы способы по уменьшению этих ошибок.
Наиболее близким к заявленному изобретению относится способ и устройство для обнаружения и селекции радиолокационных сигналов, приведенные в [2]. Способ для обнаружения и селекции радиолокационных сигналов заключается в приеме двух ортогональных компонент сигнала, преобразование аналоговых сигналов приемных устройств в цифровую форму, запоминание их в устройствах памяти, интерполирование цифровых сигналов, запоминание интерполированных цифровых сигналов и последующие определения отношения амплитуд и разности фаз ортогональных компонент селектируемого сигнала.
Недостатком способа-прототипа является то, что он не позволяет осуществлять селекцию сигналов по поляризационному признаку, принимать решение о наличии или отсутствии обнаруживаемого сигнала и проводить компенсацию влияния радиоэлектронной защиты на точность пеленгования цели. Недостатком устройства-прототипа является то, что в этом устройстве отсутствует блок, осуществляющий принятие решения о наличии или отсутствии обнаруживаемого, селектируемого сигнала по поляризационному признаку и передающие устройство, уменьшающие действие угловых шумов, вызываемых радиолокационными ловушками на систему сопровождения или наведения.
Известен способ селекции радиолокационных целей при управлении движением воздушного и морского транспорта на фоне мешающих отражений и помех [3]. Способ селекции заключается в том, что радиолокационная цель с известными поляризационными параметрами облучается сигналами линейной поляризации с вращающейся плоскостью поляризации. В отраженном от цели сигнале выделяют вторую и четвертую относительно частоты вращения плоскости поляризации исходного сигнала гармоники, параметры которых (амплитуды и фазы) и являются поляризационными параметрами цели. Решение о наличии или отсутствии селектируемой цели принимается на основе решающего правила, представляющего собой линейную комбинацию поляризационных параметров с коэффициентами, определяемыми статистическими характеристиками поляризационных параметров при наличии и при отсутствии цели. Порог принятия решения решающего правила определяется критерием максимального правдоподобия и принимается равным единице. Достигаемый технический результат - повышение эффективности селекции цели с известными поляризационными параметрами, т.е. при заданной вероятности ложной тревоги снижение до минимума вероятности принятия решения об отсутствии цели при ее наличии (вероятности пропуска цели).
Известен способ обнаружения и селекции радиолокационных сигналов по поляризационному признаку [4] Сущность изобретения заключается в приеме двух ортогональных по поляризации компонент сигнала, преобразование аналоговых сигналов в цифровую форму, запоминание их в устройствах памяти, интерполирование цифровых сигналов, запоминание интерполированных цифровых сигналов, последующие определения отношения амплитуд и разности фаз ортогональных компонент селектируемого сигнала, вычисление совокупного поляризационного параметра принимаемого сигнала - угла эллиптичности и принятие решения о наличии или отсутствии селектируемого сигнала в соответствии с критерием Неймана-Пирсона.
Недостатком указанного способа является то, что обнаружение радиолокационных целей производится по энергетическому совокупному параметру (при этом не учитываются априорные вероятности о поляризации отраженного сигнала), что не позволяет произвести согласованное по поляризации обнаружение и селекцию отраженных сигналов.
Цель изобретения - создание способа селекции объектов бронетанковой техники, реализующего спектроанализаторный алгоритм обнаружения с «плавающим» порогом по минимальному правилу обнаружения, который уменьшит влияния маскировки на точность пеленгования цели и повысят боевую эффективность противотанковых средств с радиолокационной системой управления.
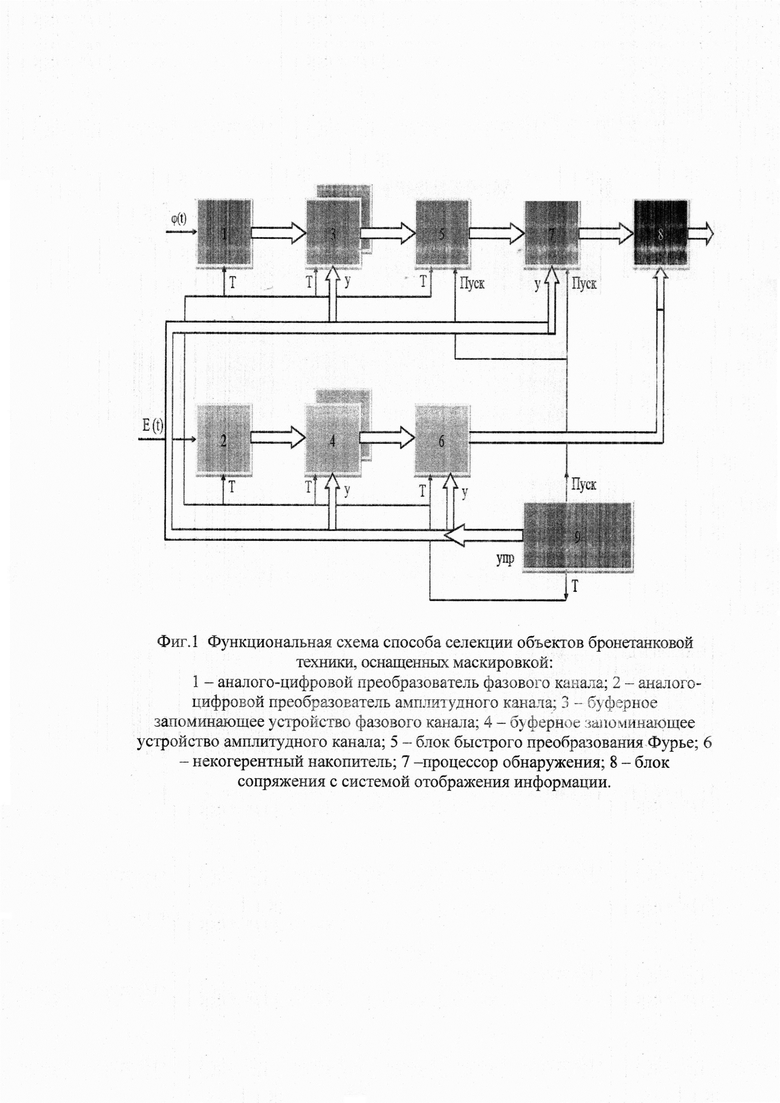
На фиг. 1 показана функциональная схема способа селекции объектов бронетанковой техники, оснащенных маскировкой.
Схема содержит:
1 - аналого-цифровой преобразователь фазового канала;
2 - аналого-цифровой преобразователь амплитудного канала;
3 - буферное запоминающее устройство фазового канала;
4 - буферное запоминающее устройство амплитудного канала;
5 - блок быстрого преобразования Фурье;
6 - некогерентный накопитель;
7 - процессор обнаружения;
8 - блок сопряжения с системой отображения информации.
Схема способа состоит из амплитудного и фазового каналов. В фазовом канале выполняются функции спектрального анализа и процедура обнаружения в соответствии с спектроанализаторным алгоритмом обнаружения с «плавающим» порогом по минимальному правилу обнаружения. В амплитудном канале осуществляется некогерентная обработка отраженных сигналов, поступающих с выхода амплитудного детектора.
С выхода фазового детектора на вход аналого-цифрового преобразователя фазового канала 1 поступают аналоговые сигналы ϕ(t). С тактовой частотой Т происходит преобразование сигнала ϕ(t) в восьмиразрядный двоичный параллельный отсчет, который запоминается в буферном запоминающем устройстве фазового канала 3. Для каждого из 256 элементов разрешения по дальности накапливается точка из 256 отсчетов. Синхронизация аналого-цифрового преобразователя 1 и буферного запоминающего устройства жестко привязана к зондирующему импульсу и осуществляется блоком управления 9. При перемещении антенны в следующее азимутальное направление заполняется вторая половина буферного запоминающего устройства фазового канала 3, а накопленная информация из первой половины буферного запоминающего устройства фазового канала 3 цифровом виде поступает на обработку в блок быстрого преобразования Фурье 5. Необходимый объем буферного запоминающего устройства фазового канала 3 129 кб, а для квадратурного канала 256 кбайт.
С выхода блока быстрого преобразования Фурье 5 совокупность спектральных отсчетов поступает на процессор обнаружения 7, где по «зашитой» в него минимаксной программе алгоритма с «плавающим» порогом осуществляется накопление дискретных значений амплитуды и фазы отраженного сигнала, определяется величина и направление отклонения энергетического центра объекта от геометрического центра цели и осуществляется их усреднение, тем самым минимизируется влияние на цель средств маскировки. Информация о наличии цели на фоне мешающих отражений и помех, а также оснащенных средствами маскировки с выхода процессора обнаружения 7 поступает в блок сопряжения с системой отображения информации 8 в виде совокупности координат по азимуту и дальности, а также информации о времени обнаружения, в котором произошло обнаружение. В амплитудном канале сигнал с амплитудного детектора поступает на вход аналого-цифрового преобразователя амплитудного канала 2, с выхода которого 8-ми разрядные отсчеты запоминаются в буферном запоминающем устройстве амплитуднрго канала 4.
Таким образом, в буферном запоминающем устройстве амплитудного канала 4 может быть накоплено до 128 отсчетов каждого элемента дальности. Объем буферного запоминающего устройства амплитудного канала 4 равен 32 кб. Некогерентный накопитель 6 усредняет накопленную пачку отсчетов и передает ее в систему блока сопряжения г системой отображения информации 8 телевизионного типа. Управление работой устройства, синхронизация с азимутальным положением антенны к. передатчиком радиолокационной системой управления осуществляется блоком управления 9.
Таким образом, использование описанного способа селекции объектов бронетанковой техники, оснащенных средствами маскировки позволяет повысить достоверность распознавания цели на основе реализующего спектроанализаторного алгоритма обнаружения с «плавающим» порогом по минимальному правилу обнаружения, что в конечном итоге приводит к повышению боевой эффективности противотанковых средств с радиолокационной системой управления.
Список использованных источников
1. Небабин В.Г., Сергеев В.В. Методы и техника радиолокационного распознавания, М.: Радио и связь, 1986.
2. Пат.США US 6,768,971 B1, H01Q 21/06. Опубл. 27.07.2004 - прототип.
3. Патент РФ №2256194. Опубл. 10.07.2003 г., МПК G01S 13/04.
4. Патент РФ №2476903. Опубл. 09.03.2011, МПК: G01S 13/04.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ И СЕЛЕКЦИИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ ПО ПОЛЯРИЗАЦИОННОМУ ПРИЗНАКУ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2476903C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ЛЮДЕЙ И ДВИЖУЩИХСЯ ОБЪЕКТОВ ЗА ПРЕГРАДОЙ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2384860C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ДВИЖУЩЕЙСЯ ЦЕЛИ С РАЗЛИЧЕНИЕМ СКОРОСТНЫХ И МАНЕВРЕННЫХ ХАРАКТЕРИСТИК | 2015 |
|
RU2619056C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И ВЫСОКОТОЧНОГО ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ МОРСКИХ ЛЕДОВЫХ ПОЛЕЙ И РАДИОЛОКАЦИОННАЯ СИСТЕМА, ЕГО РЕАЛИЗУЮЩАЯ | 2011 |
|
RU2467347C1 |
| СПОСОБ СЕЛЕКЦИИ РАДИОЛОКАЦИОННОЙ ЦЕЛИ С ИЗВЕСТНЫМИ ПОЛЯРИЗАЦИОННЫМИ ПАРАМЕТРАМИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2256194C2 |
| СПОСОБ АДАПТИВНОЙ НАСТРОЙКИ КАНАЛОВ УСКОРЕНИЯ В МНОГОКАНАЛЬНОМ ОБНАРУЖИТЕЛЕ МАНЕВРИРУЮЩЕЙ ЦЕЛИ | 2013 |
|
RU2542347C1 |
| СПОСОБ И УСТРОЙСТВО СЕЛЕКЦИИ ДВИЖУЩИХСЯ НАЗЕМНЫХ ЦЕЛЕЙ В ТРЕХКАНАЛЬНОЙ ЦИФРОВОЙ РСА | 1998 |
|
RU2205423C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ТРАЕКТОРИИ МАНЕВРИРУЮЩЕГО ОБЪЕКТА | 2014 |
|
RU2553459C1 |
| Способ обнаружения и селекции радиосигналов по комплексному поляризационному признаку | 2024 |
|
RU2840500C1 |
| ЦИФРОВОЕ УСТРОЙСТВО ОЦЕНКИ ДАЛЬНОСТИ | 2004 |
|
RU2264650C1 |
Изобретение относится к области радиолокации. Технический результат заключается в повышении достоверности распознавания цели на основе реализующего спектроанализаторного алгоритма обнаружения с «плавающим» порогом по минимальному правилу обнаружения. Такой результат достигается тем, что принятый сигнал после обработки в аналого-цифровом преобразователе фазового канала преобразовался в восьмиразрядный двоичный параллельный отсчет, который запоминается в буферном запоминающем устройстве фазового канала и в цифровом виде поступает на обработку в блок быстрого преобразования Фурье. С выхода блока быстрого преобразования Фурье совокупность спектральных отсчетов поступает на специальный процессор обнаружения, где по «зашитой» в него минимаксной программе алгоритма с «плавающим» порогом осуществляется накопление дискретных значений амплитуды и фазы отраженного сигнала, определяется величина и направление отклонения энергетического центра объекта от геометрического центра цели и осуществляется их усреднение, тем самым минимизируется влияние на цель средств маскировки. Информация о наличии цели на фоне мешающих отражений и помех, а также оснащенных средствами маскировки с выхода процессора обнаружения поступает через блок сопряжения с системой отображения информации в виде совокупности координат по азимуту и дальности, а также информации о времени обнаружения (порядковом номере сканирования), в котором произошло обнаружение. 1 ил.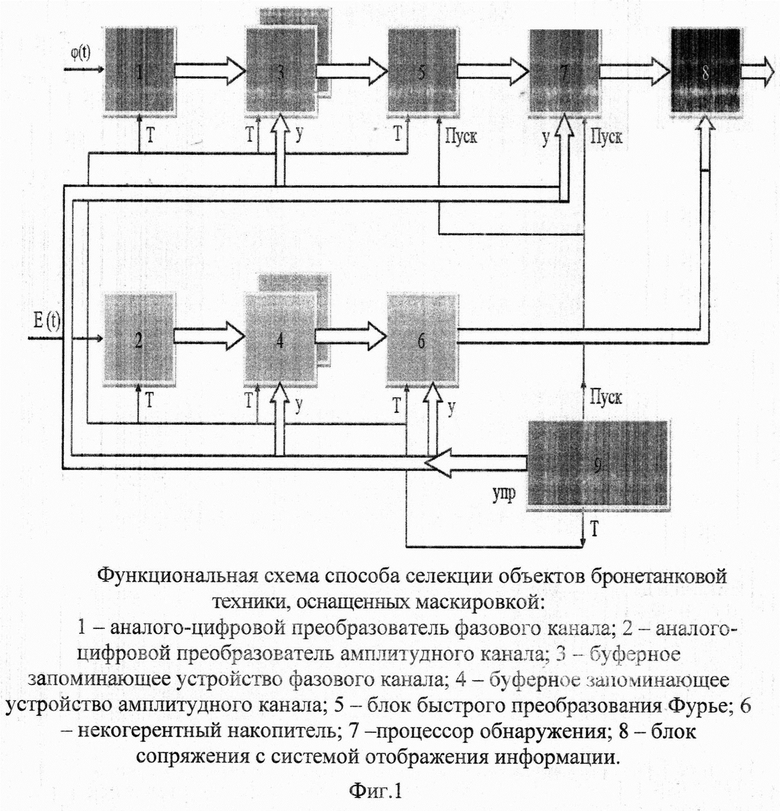
Способ селекции объектов бронетанковой техники, оснащенных средствами маскировки, заключающийся в том, что на вход аналого-цифрового преобразователя фазового канала поступают аналоговые сигналы ϕ(t), с тактовой частотой Т происходит преобразование сигнала ϕ(t) в восьмиразрядный двоичный параллельный отсчет, который запоминается в буферном запоминающем устройстве фазового канала, синхронизация аналого-цифрового преобразователя и буферного запоминающего устройства жестко привязана к зондирующему импульсу и осуществляется блоком управления, при этом при перемещении антенны в следующее азимутальное направление заполняется вторая половина буферного запоминающего устройства фазового канала, а накопленная информация из первой половины буферного запоминающего устройства фазового канала в цифровом виде поступает на обработку в блок быстрого преобразования Фурье, с выхода блока быстрого преобразования Фурье совокупность спектральных отсчетов поступает на процессор обнаружения, где по «зашитой» в него минимаксной программе алгоритма с «плавающим» порогом осуществляется накопление дискретных значений амплитуды и фазы отраженного сигнала, определяются величина и направление отклонения энергетического центра объекта от геометрического центра цели и осуществляется их усреднение, тем самым минимизируется влияние на цель средств маскировки, информация о наличии цели на фоне мешающих отражений и помех, а также оснащенных средствами маскировки с выхода процессора обнаружения поступает в блок сопряжения с системой отображения информации в виде совокупности координат по азимуту и дальности, а также информации о времени обнаружения, в котором произошло обнаружение, в амплитудном канале сигнал с амплитудного детектора поступает на вход аналого-цифрового преобразователя амплитудного канала, с выхода которого восьмиразрядные отсчеты запоминаются в буферном запоминающем устройстве амплитудного канала, некогерентный накопитель усредняет накопленную пачку отсчетов и передает ее в систему блока сопряжения с системой отображения информации, при этом управление работой буферными запоминающими устройствами, синхронизация с азимутальным положением антенны и передатчиком радиолокационной системой управления осуществляется блоком управления.
| US 6768971 B1, 27.07.2004 | |||
| СПОСОБ СЕЛЕКЦИИ РАДИОЛОКАЦИОННОЙ ЦЕЛИ С ИЗВЕСТНЫМИ ПОЛЯРИЗАЦИОННЫМИ ПАРАМЕТРАМИ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2256194C2 |
| СПОСОБ ОБНАРУЖЕНИЯ И СЕЛЕКЦИИ РАДИОЛОКАЦИОННЫХ СИГНАЛОВ ПО ПОЛЯРИЗАЦИОННОМУ ПРИЗНАКУ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2476903C2 |
| ПЕЛЕНГАТОР ГИДРОАКУСТИЧЕСКОЙ НАВИГАЦИОННОЙ СИСТЕМЫ С УЛЬТРАКОРОТКОЙ БАЗОЙ | 2000 |
|
RU2179730C1 |
| Способ регенерирования сульфо-кислот, употребленных при гидролизе жиров | 1924 |
|
SU2021A1 |

