Изобретение относится к системам дистанционного управления газотурбинным двигателем, преимущественно главным судовым двигателем.
Известна система дистанционного управления газотурбинным двигателем по а.с. SU 1539141 А1 от 30.01.90 (прототип), содержащая задающий орган, соединенный с исполнительным механизмом, кинематически связанным с датчиком обратной связи.
У современных судовых газотурбинных двигателей точки изменения характеристики перемещения задающего органа регулятора подачи топлива являются индивидуальными для каждого двигателя и требуют точной настройки, которая обеспечивается оператором за счет изменения времени перемещения задающего органа системы управления.
Для управления таким двигателем известная система является недостаточно надежной, так как в ней отсутствует автоматическая блокировка возможных неправильных действий оператора при управлении двигателем, которые могут привести к аварии двигателя. Цель изобретения - повышение надежности системы дистанционного управления газотурбинным двигателем.
Для этого в системе дистанционного управления газотурбинным двигателем задающий орган соединен при помощи сумматоров и усилителей с исполнительным механизмом, кинематически связанным с кулачковым механизмом с концевыми выключателями, причем, по меньшей мере, между одним из сумматоров и усилителем включены последовательно логический элемент И, входы которого соединены с концевыми выключателями, и мультивибратор, кулачковый механизм выполнен с валом, кинематически связанным с исполнительным механизмом, и снабжен свободно установленными на валу кулачками, взаимодействующими с концевыми выключателями, и фиксированно установленными на валу разделительными шайбами, размещенными вдоль оси вала между кулачками, при этом вал имеет продольный паз, в котором расположена ступенчатая шпонка, имеющая углубления в местах размещения на валу кулачков и выступы в местах размещения на валу разделительных шайб, а вал снабжен гайкой, взаимодействующей через прижимную пружину с разделительными шайбами и кулачками.
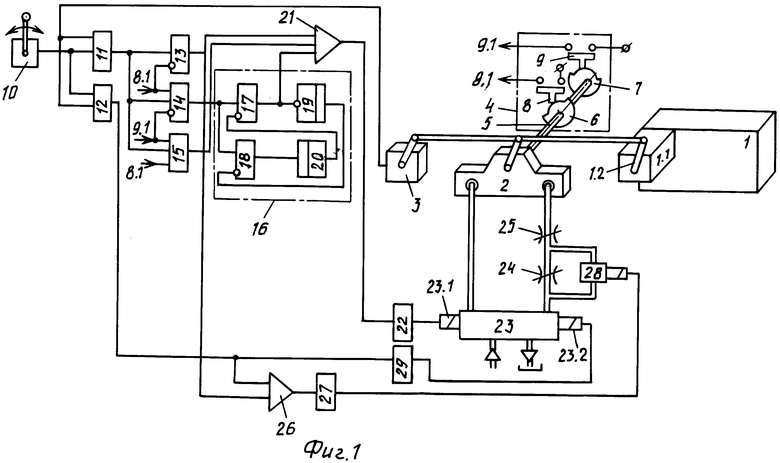
На фигуре 1 приведена функциональная схема системы;
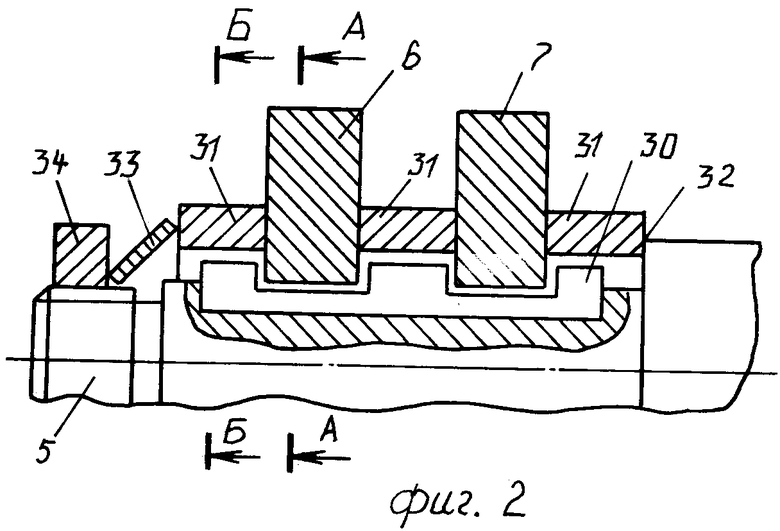
на фигуре 2 - схема установки кулачков и разделительных шайб на валике;
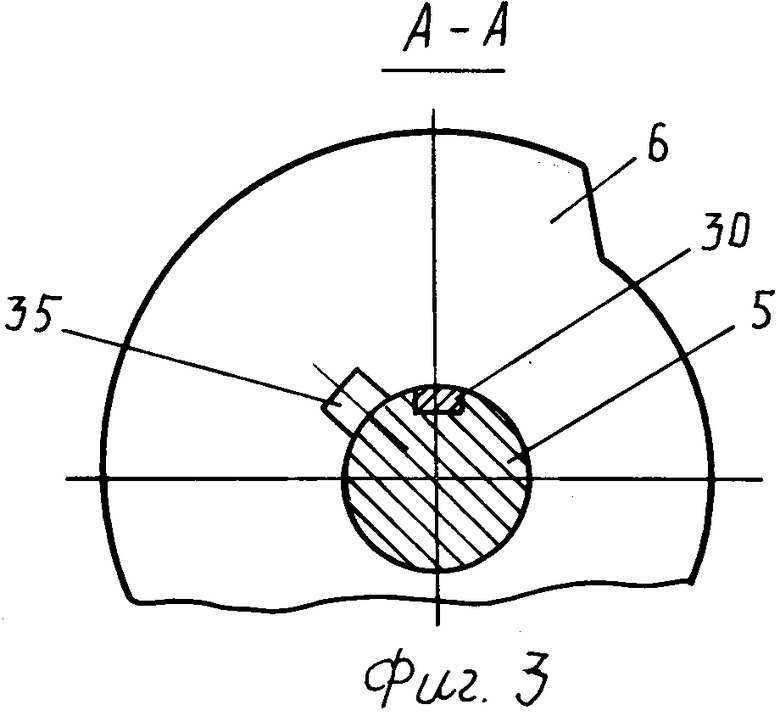
на фигуре 3 - разрез А-А на фигуре 2 (по месту установки кулачка);
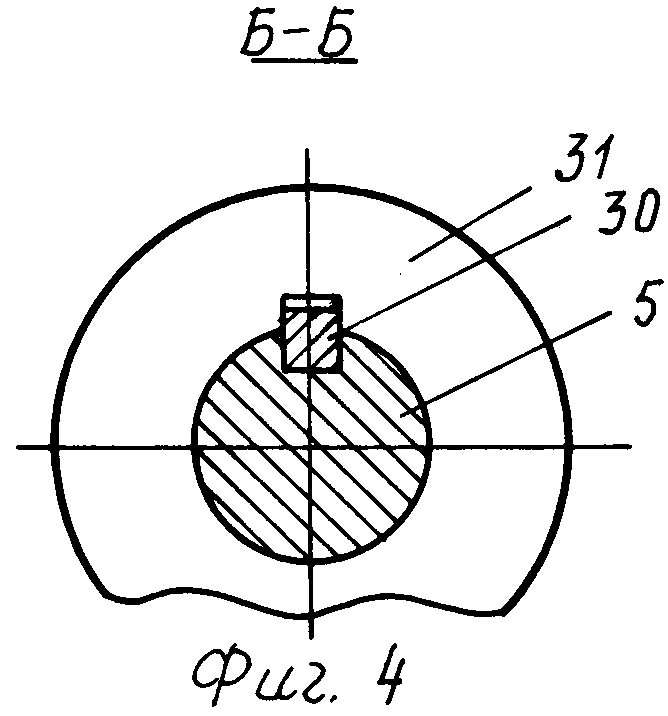
на фигуре 4 - разрез Б-Б на фигуре 2 (по месту установки разделительной шайбы).
Газотурбинный двигатель 1 снабжен регулятором 1.1 подачи топлива в двигатель, рычаг 1.2 которого кинематически связан с исполнительным механизмом 2 управления двигателем.
Исполнительный механизм 2 кинематически связан также с датчиком 3 обратной связи и кулачковым механизмом 4. Кулачковый механизм 4 содержит насаженные на вал 5 кулачки 6 и 7, взаимодействующие с концевыми выключателями 8 и 9, выводы которых обозначены 8.1 и 9.1.
На посту управления размещен задающий орган (задатчик) 10, выход которого подключен параллельно с выходом датчика 3 к входам сумматоров 11 и 12.
Сумматор 11 выдает сигнал на выходе, когда уровень сигнала от задатчика 10 выше уровня сигнала от датчика 3.
Сумматор 11 связан с входами логических элементов И 13, 14 и 15. Второй, инверсный вход элемента И 13 связан с концевым выключателем 8 (зона пуска) - канал 8.1. Второй, прямой вход элемента И 14 связан с выключателем 8, а третий, инверсный вход - с выключателем 9 (зона переключения режима) - канал 9.1. Второй и третий прямые входы элемента И 15 связаны с выключателями 8 и 9.
Выход элемента И 14 соединен с мультивибратором 16, состоящим из логических элементов И 17 и И 18, элемента задержки времени 19 (с задержкой на выходе) и элемента задержки времени 20 (с задержкой на входе). Мультивибратор 16 осуществляет линейно-кусочную аппроксимацию выходного сигнала И 14.
Выходы элементов И 13, 15 и 17 через элемент ИЛИ 21 и усилитель 22 подключены к электромагниту 23.1 "Больше" (увеличение подачи топлива) электрогидравлического преобразователя 23. Последний связан гидравлическими каналами, в которые встроены дроссели 24 и 25, с полостями исполнительного механизма 2.
Выходы сумматора 12 и элемента И 13 через логический элемент ИЛИ 26 и усилитель 27 подключены к электромагниту электрогидравлического запорного крана 28, подключенного гидравлическими каналами параллельно дросселю 24.
Выход сумматора 12 подключен при помощи усилителя 29 к электромагниту 23.2 "Меньше" (уменьшение подачи топлива) преобразователя 23.
В кулачковом механизме 4, в его валу 5 выполнен продольный паз, в котором установлена ступенчатая шпонка 30, с выступами и углублениями. Кулачки 6 и 7, свободно установленные на валу 5, разделены разделительными шайбами 31 между собой и упорным выступом 32 вала. Шайбы 31 взаимодействуют с выступом 32 и кулачками 6 и 7 при помощи прижимной пружины 33 и гайки 34, сжимающих кулачки 6 и 7 и шайбы 31 в один жесткий пакет, упирающийся в выступ 32 вала 5.
Кулачки 6 и 7 снабжены отверстиями по форме вала 5 и шпонки 31 (на фигуре 3 показано отверстие 35 в кулачке 6), позволяющие устанавливать кулачки на вал при установленной в пазу вала 5 шпонке 30. Аналогичные отверстия выполнены в шайбах 31. Кулачки 6 и 7 расположены на валу 5 в местах, где в теле шпонки 30 выполнены впадины заподлицо с поверхностью вала 5. Шайбы 31 расположены на валу 5 в местах, где тело шпонки 30 выступает из вала.
Система работает следующим образом.
При задании задатчиком 10 определенной величины рассогласования (на входе сумматора 11 задано увеличение подачи топлива в двигатель 1 из положения "стоп") на выходе сумматора 11 появляется сигнал, поступающий на прямые входы элементов И 13, 14 и 15. Поскольку в этот момент сигнал 8.1 от концевого выключателя 8 (зона пуска) на входах элементов И 14 и 15 отсутствует, появляется сигнал только на выходе элемента И 13 (при отсутствии на инверсном входе И 13 сигнала 8.1).
Сигнал с выхода элемента И 13 через ИЛИ 21 и усилитель 22 поступает на электромагнит 23.1 преобразователя 23, а через элемент ИЛИ 26 и усилитель 27 - на электромагнит крана 28, шунтирующий при этом дроссель 24.
Рабочая жидкость поступает от преобразователя 23 через дроссель 25 в механизм 2, заставляя его отрабатывать с большой скоростью.
Механизм 2 кинематически связан с рычагом 1.2 регулятора 1.1 двигателя 1, с датчиком 3 обратной связи и с валом 5 кулачкового механизма 4. Отработка механизма 2 продолжается до тех пор, пока кулачок 6 замкнет концевой выключатель 8. Сигнал 8.1 от выключателя 8 свидетельствует о том, что исполнительный механизм 2 и связанный с ним регулятор 1.1 пришли в зону пуска. Рукоятка задатчика 10 также должна быть установлена при этом в зоне пуска (по шкале задатчика). Сигнал от задатчика 10 и датчика 3 обратной связи сравниваются на входах сумматора 11 и сигнал с его выхода снимается.
После пуска двигателя 1 переводом рукоятки задатчика 10 устанавливается любое положение на увеличение подачи топлива в двигатель, например, выше зоны перестройки режимов. На выходе сумматора 11 вновь появляется сигнал.
Элемент И 13 блокирован появлением на его инверсном входе сигнала 8.1 от выключателя 8.
Элемент И 15 также блокирован, так как на его входе нет сигнала 9.1 от конечного выключателя 9 (зона перестройки режима).
Сигнал на выходе появляется только у элемента И 14, у которого сигнал 8.1 поступает на прямой вход, а сигнал 9.1 - на инверсный вход.
С выхода элемента И 14 сигнал поступает на вход элемента ИЛИ 21 через мультивибратор 16.
Мультивибратор 16 осуществляет линейно-кусочную аппроксимацию характеристики задатчика 10 к потребной характеристике отработки механизма 2.
Мультивибратор может быть симметричным или несимметричным за счет настройки элементов 19 и 20 задержки времени, определяющих плечи мультивибратора. Время настройки элементов 19 и 20 определяют временные характеристики разгона двигателя и допустимую величину угла перемещения рычага 1.2 регулятора 1.1 двигателя - (допустимую величину заброса топлива в двигатель). Мультивибратор работает следующим образом.
Сигнал с выхода элемента И 14 через элемент И 17 поступает через элемент ИЛИ 21 и усилитель 22 на электромагнит 23.1 преобразователя 23. Сигнал с выхода И 17 также поступает на инверсный вход элемента задержки времени 19, снимая сигнал с его выхода, при этом появляется сигнал на выходе И 18. Сигнал с выхода И 18 поступает на вход элемента задержки времени 20. После появления (с задержкой) сигнала на выходе элемента 20 он блокирует элемент И 17, снимая сигнал (с задержкой) с выхода элемента 19.
Цикл повторяется, когда сигнал с выхода элемента 14 снимется, разблокируя элемент И 18 и через элемент 20 с задержкой времени на входе блокируется элемент И 17.
После прихода исполнительного механизма 2 в зону перестройки режима кулачок 7 замкнет концевой выключатель 9 и сигнал 9.1 с его выхода блокирует элемент И 14 и задействует элемент И 15. Выходной сигнал элемента И 15 через элемент ИЛИ 21 и усилитель 22 воздействует на электромагнит 23.1 ("больше") преобразователя 23, пока сигнал от датчика 3 обратной связи сравняется с сигналом задатчика 10 на входах сумматора 11.
Переводом рукоятки задатчика 10 на уменьшение подачи топлива создается разница в сигналах задатчика 10 и датчика 3 обратной связи на входах сумматора 12. Сигнал с его выхода через усилитель 29 поступает на электромагнит 23.2 ("Меньше") преобразователя 23 и через ИЛИ 26 и усилитель 27 на электромагнит крана 28, шунтирующего при этом дроссель 24.
Исполнительный механизм 2 с большой скоростью переводит регулятор 1.1 на уменьшение подачи топлива, одновременно воздействуя на датчик 3 обратной связи, пока сигнал с выхода датчика 3 и задатчика 10 сравняются на входах сумматора 12.
Регулировка положения кулачков 6 и 7 является для каждого двигателя индивидуальной и выполняется непосредственно на двигателе после установки на двигателе исполнительного механизма 2 и кулачкового механизма 4, по шкале регулятора 1.1 двигателя 1. Необходимая точность установки кулачков может быть обеспечена только их бесступенчатой регулировкой и жесткой фиксацией окончательно отрегулированных кулачков между собой и положением рычага регулятора 1.1.
Для обеспечения этих требований в вале 5 кулачкового механизма 4 выполнен продольный паз, в который вставлена ступенчатая шпонка 30, соответствующая по длине пакету кулачков 6 и 7 и разделительных шайб 31. При сборке на вал 5 одевается вначале шайба 31, затем кулачок, например 6, снова шайба 31, кулачок 7 и наружная шайба 31. Перед последней шайбой 31 на вал 5 одевается прижимная пружина 33 и на резьбовой конец вала 5 навинчивается гайка 34. При этом шайба 31 размещается в местах выступающих частей шпонки 30, а кулачки - в местах, где тело шпонки 30 срезано заподлицо с поверхностью вала 5.
Когда пружина 39 не затянута гайкой 34, кулачки 6 и 7 при регулировке их положения могут свободно устанавливаться вручную в любое необходимое положение раздельно друг от друга. За счет того, что кулачки 6 и 7 разделены при этом неподвижной шайбой 31, изменение положения одного кулачка не приводит к изменению положения другого, уже отрегулированного кулачка.
После настройки кулачков затягивают гайкой 34 пружину 33, прижимающую пакет кулачков 6 и 7 с разделительными шайбами 31 к выступу 32 вала 5, при этом установленное положение кулачков 6 и 7 жестко фиксируется и не изменяется при работе механизма 2, в процессе которого вал 5, кинематически связанный с механизмом, вращается, нажимая кулачками 6 и 7 поочередно на концевые выключатели 8 и 9 соответственно.
Применение предложенной системы обеспечивает надежное управление судовыми газотурбинными двигателями и высокую технологичность регулировки системы с двигателем как при первоначальной установке ее на двигатель, так и в процессе эксплуатации двигателя, например, при замене регулятора подачи топлива в двигатель.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПНЕВМАТИЧЕСКАЯ СИСТЕМА ДИСТАНЦИОННОГО | 1969 |
|
SU254355A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РАБОТОЙ ДИЗЕЛЯ НА ХОЛОСТОМ ХОДУ И В АВАРИЙНЫХ СИТУАЦИЯХ | 2005 |
|
RU2296236C1 |
| ДИСТАНЦИОННЫЙ ПРИВОД УПРАВЛЕНИЯ СУДОВЫМ ДВИГАТЕЛЕМ | 2003 |
|
RU2238880C1 |
| Система дистанционного управления для двигателя внутреннего сгорания | 1980 |
|
SU889880A2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ДИСТАНЦИОННЫЙ ПРИВОД | 2003 |
|
RU2256106C1 |
| Силовая установка | 1979 |
|
SU802573A1 |
| Следящая система | 1983 |
|
SU1120280A1 |
| Автоматическая дистанционная система управления для двигателя внутреннего сгорания | 1980 |
|
SU926341A1 |
| СЛЕДЯЩАЯ СИСТЕМА | 1993 |
|
RU2087026C1 |
| Регулятор давления для насосной станции магистрального трубопровода | 1985 |
|
SU1256002A2 |
Система предназначена для газотурбинного двигателя, преимущественно главного судового двигателя. Данное изобретение позволит повысить надежность системы дистанционного управления газотурбинным двигателем. Система дистанционного управления газотурбинным двигателем содержит задающий орган, соединенный с исполнительным механизмом, кинематически связанным с датчиком обратной связи. Задающий орган соединен при помощи сумматоров и усилителей с исполнительным механизмом, кинематически связанным с кулачковым механизмом с концевыми выключателями, причем по меньшей мере, между одним из сумматоров и усилителем включены последовательно логический элемент И, входы которого соединены с концевыми выключателями, и мультивибратор, при этом кулачковый механизм выполнен с валом, кинематически связанным с исполнительным механизмом, и снабжен свободно установленными на валу кулачками, взаимодействующими с концевыми выключателями, и фиксирование установленными на валу разделительными шайбами, размещенными вдоль оси вала между кулачками. Вал имеет продольный паз, в котором расположена ступенчатая шпонка, имеющая углубления в местах размещения на валу кулачков и выступы в местах размещения на валу разделительных шайб, а вал снабжен гайкой, взаимодействующей через прижимную пружину с разделительными шайбами и кулачками. 4 ил.
Система дистанционного управления газотурбинным двигателем, содержащая задающий орган, соединенный с исполнительным механизмом, кинематически связанным с датчиком обратной связи, отличающаяся тем, что задающий орган соединен при помощи сумматоров и усилителей с исполнительным механизмом, кинематически связанным с кулачковым механизмом с концевыми выключателями, причем, по меньшей мере, между одним из сумматоров и усилителем включены последовательно логический элемент И, входы которого соединены с концевыми выключателями, и мультивибратор, кулачковый механизм выполнен с валом, кинематически связанным с исполнительным механизмом, и снабжен свободно установленными на валу кулачками, взаимодействующими с концевыми выключателями, и фиксированно установленными на валу разделительными шайбами, размещенными вдоль оси вала между кулачками, при этом вал имеет продольный паз, в котором расположена ступенчатая шпонка, имеющая углубления в местах размещения на валу кулачков и выступы в местах размещения на валу разделительных шайб, а вал снабжен гайкой, взаимодействующей через прижимную пружину с разделительными шайбами и кулачками.
| Дистанционный привод управления судовым двигателем | 1988 |
|
SU1539141A1 |
| Электрогидравлический дистанционный привод | 1975 |
|
SU557208A1 |
| SU 1394789 A1, 25.05.1986 | |||
| УСТРОЙСТВО ДЛЯ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ | 0 |
|
SU341968A1 |
| US 5327720 А, 12.07.1994 | |||
| СПОСОБ И УСТРОЙСТВО ДЛЯ ПЕРЕДАЧИ ДАННЫХ | 2017 |
|
RU2733277C1 |

