Изобретение относится к судостроению, в частности, к дистанционным приводам и системам управления судовыми двигателями, преимущественно судовыми газотурбинными двигателями.
Известно устройство по а.с. 1539141 (прототип) - дистанционный привод управления судовым двигателем, содержащий основной канал управления, состоящий из логического блока, соединенного при помощи блока ограничения скорости отработки с исполнительным механизмом, кинематически связанным с датчиком обратной связи, и задатчиком режима работы двигателя, по меньшей мере один резервный канал управления, состоящий из кнопочных замыкателей, подключенных с одной стороны к резервному источнику электропитания, а с другой - через второй блок ограничения скорости отработки к исполнительному механизму, и соединенных при помощи логического элемента ИЛИ и запоминающего блока с блокировочными элементами И, включенными между логическим блоком и вторым блоком ограничения скорости отработки и переключатель основного и резервного каналов управления, также привод снабжен дополнительным запоминающим блоком, сумматором сравнения, кнопочным замыкателем быстрого уменьшения частоты вращения двигателя, каналом экстренного уменьшения частоты вращения двигателя и шестью дополнительными логическими элементами ИЛИ, первый и второй из которых включены между блокировочными логическими элементами И и блоками ограничения скорости отработки, третий и четвертый - между блокировочными логическими элементами И и запоминающим блоком и дополнительным запоминающим блоком соответственно, пятый - между вторым блоком ограничения скорости отработки, дополнительным запоминающим блоком и исполнительным механизмом, шестой - между сумматором сравнения, кнопочным замыкателем каналов управления и дополнительным запоминающим блоком, при этом канал экстренного уменьшения частоты вращения двигателя включает в себя кнопочный замыкатель, подключенный с одной стороны к резервному источнику электропитания, а с другой - при помощи дополнительного запоминающего блока, третьего и четвертого дополнительных логических элементов ИЛИ к блокировочным логическим элементам И, а через пятый дополнительный логический элемент ИЛИ - к исполнительному механизму после блоков ограничения скорости отработки, причем вход сброса дополнительного запоминающего блока подключен при помощи шестого дополнительного элемента ИЛИ прямым входом к переключателю каналов управления, а инверсным - к выходу сумматора сравнения сигналов задатчика и датчика обратной связи основного канала управления.
Недостатком известного устройства является его низкая надежность при управлении судовым двигателем, в особенности судовым газотурбинным двигателем, в условиях скоростного малотоннажного судна из-за отсутствия защиты по неисправности (обрыву цепей) задатчика и датчика обратной связи и невозможности остановить двигатель при пожаре в машинном отделении и перегорании кабелей системы управления и защиты двигателя.
Цель изобретения - повышение надежности дистанционного привода управления судовым двигателем.
Для этого дистанционный привод дополнительно снабжен каналом защиты от обрыва цепей задатчика и датчика обратной связи и каналом аварийной остановки двигателя, при этом канал защиты содержит последовательно соединенные логический элемент И и запоминающий блок, причем ко входам элемента И подключены параллельно выходы задатчика и датчика обратной связи, выход элемента И подключен к прямым входам блокировочных элементов И основного канала управления, выход запоминающего блока подключен к аварийной сигнализации, а канал аварийной остановки содержит силовой привод исполнительного механизма, подключенный входом к автономному источнику силового питания, выходом подключенный непосредственно к части исполнительного механизма, работающей на уменьшение подачи топлива в двигатель, и снабженный ручным подпружиненным органом управления, взаимодействующим с концевым выключателем, подключенным входом к резервному источнику электропитания, а выходом - к входу записи запоминающего блока канала аварийной остановки, выход которого подключен к инверсному входу блокировочного элемента И в основном канале управления увеличением частоты вращения двигателя и к инверсному входу дополнительного блокировочного логического элемента И, включенного в резервном канале управления между выходом кнопочного замыкателя на увеличение частоты вращения и входом элемента ИЛИ в канале управления увеличением частоты вращения между выходом блокировочного элемента И и блоком ограничения скорости отработки механизма, при этом входы сброса запоминающих блоков канала защиты и канала аварийной остановки подключены к резервному источнику электропитания при помощи дискретного органа отмены команды.
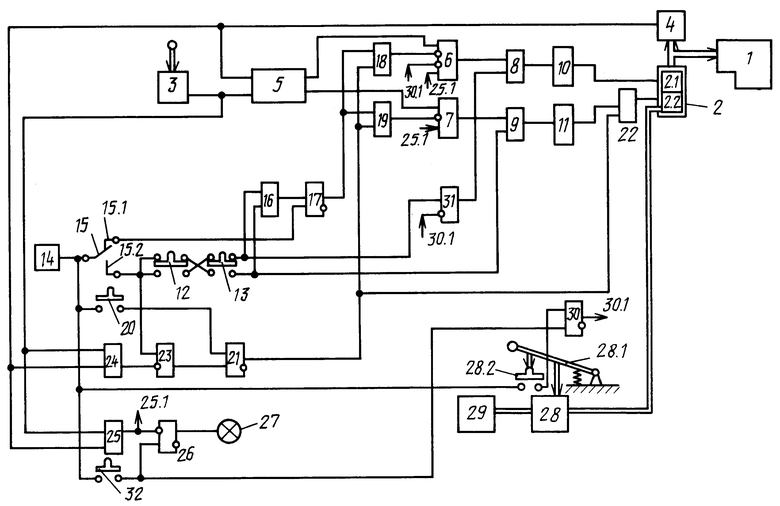
На чертеже изображена функциональная схема дистанционного привода управления судовым двигателем.
Двигатель 1 кинематически связан с исполнительным механизмом 2, имеющим две части: часть 2.1, работающую на увеличение частоты вращения двигателя (увеличение подачи топлива в двигатель), и часть 2.2 - соответственно на уменьшение частоты вращения двигателя.
Задатчик 3 режимов работы двигателя 1 и датчик 4 обратной связи следящего канала управления подключены к входам логического блока 5.
Датчик 4 обратной связи кинематически связан с выходом исполнительного механизма 2. Выходы логического блока 5 при помощи блокировочных логических элементов И 6 и 7 и промежуточных логических элементов ИЛИ 8 и 9 подключены к блокам 10 и 11 ограничения скорости отработки исполнительного механизма 2.
Кнопочные замыкатели 12 и 13 резервного канала управления режимами работы двигателя 1 подключены к резервному источнику электропитания 14 при помощи переключателя 15 и при помощи логических элементов ИЛИ 8 и 9 - к блокам 10 и 11 ограничения скорости отработки механизма 2.
Кроме того, параллельно замыкатели 12 и 13 подключены при помощи логического элемента ИЛИ к запоминающему блоку 17, выход которого при помощи логических элементов ИЛИ 18 и 19 подключен к инверсным входам логических элементов И 6 и 7.
Вход сброса блока 17 подключен к переключателю 15. Кнопочный замыкатель 20 быстрого уменьшения частоты вращения (подачи топлива) двигателя 1 подключен к резервному источнику электропитания и при помощи дополнительного запоминающего блока 21 через логические элементы ИЛИ 18 и 19 - к инверсным входам логических элементов И 6 и 7, а через логический элемент ИЛИ 22 - к части 2.2 (работающей на уменьшение подачи топлива в двигатель) исполнительного механизма 2 помимо блока 11 ограничения скорости отработки механизма.
Вход сброса блока 21 связан через прямой вход логического элемента ИЛИ 23 с каналом резервного управления, а через инверсный вход логического элемента ИЛИ 23 - с выходом сумматора 24, входы которого связаны с выходом задатчика 3 и датчика 4 обратной связи.
Блоки 10 и 11 ограничения скорости представляют собой, например, генераторы электрических импульсов с регулируемой скважностью сигнала, уменьшение частоты выходного сигнала которых ограничивает скорость перекладки исполнительного механизма 2.
Канал защиты привода от обрыва цепей задатчика 3 и датчика обратной связи 4 содержит последовательно соединенные логический элемент И 25 и запоминающий блок 26.
К прямым входам И 25 подключены выходы задатчика 3 и датчика 4 обратной связи. Сигнал с выхода И 25 (обозначен 25.1) поступает на прямые входы блокировочных элементов И 18 и 19 основного канала следящего управления.
Сигнал с выхода запоминающего блока 26 подключен к аварийной сигнализации 27.
Канал аварийной остановки двигателя 1 содержит силовой привод 28 с ручным подпружиненным органом 28.1 управления, взаимодействующим с концевым выключателем 28.2. Привод 28 подключен входом к автономному источнику 29 силового питания, а выходом привод 28 подключен непосредственно к исполнительному механизму 2, к его части 2.2, работающей на уменьшение подачи топлива в двигатель.
Концевой выключатель 28.2 подключен входом к резервному источнику питания, а выходом - к входу записи запоминающего блока 30 канала аварийной остановки. Выход запоминающего блока 30 подключен к инверсному входу блокировочного логического элемента И 6 основного следящего канала управления (на увеличение частоты вращения двигателя) и к инверсному входу дополнительного блокировочного логического элемента И 31.
Логический элемент И 31 подключен вторым прямым входом к выходу кнопочного замыкателя 13, через который от кнопочного замыкателя 12 поступает сигнал на увеличение подачи топлива в двигатель по резервному каналу управления. Выход логического элемента И 31 подключен к входу элемента ИЛИ 8 в основном канале управления на увеличение частоты вращения двигателя.
Входы сброса запоминающих блоков 26 в канале защиты и 30 в канале аварийной остановки подключены при помощи дискретного органа 32 отмены команды к резервному источнику электропитания.
Привод работает следующим образом.
При управлении двигателем 1 при помощи основного канала управления сигнал от задатчика 3 режимов работы двигателя и датчика 4 обратной связи поступает на вход логического блока 5. При наличии рассогласования между этими сигналами, превышающими зону нечувствительности следящего канала, на выходе логического блока 5 появится сигнал, поступающий на входы логических элементов И 6 и 7.
При отсутствии на инверсных входах логических элементов И 6 и 7 сигнала с выхода запоминающего блока 17, с выхода запоминающего блока 30 канала аварийной остановки двигателя и при наличии на прямых входах сигнала от элемента И 25 канала защиты, с выхода элемента ИЛИ 8 или 9 сигнал соответственно через блоки 10 или 11 ограничения скорости отработки исполнительного механизма поступает на исполнительный механизм 2, воздействующий на орган регулирования режима работы двигателя 1 и одновременно на датчик 4 обратной связи, пока сигналы задатчика 3 и датчика 4 на входах блока 5 не сравняются. Кроме того, указанные сигналы поступают на входы сумматора 24. В случае равенства на выходе сумматора сигнал исчезает и на выходе логического элемента ИЛИ 23 появится сигнал, который приводит запоминающий блок 21 в исходное состояние, поэтому на выходе логических элементов ИЛИ 18 и 19 сигнал отсутствует и логические элементы И 6 и 7 включены.
При выходе из строя следящего канала управления, например при обрыве цепей задатчика 3 или датчика 4 обратной связи, работу следящего канала необходимо немедленно блокировать, чтобы обеспечить консервативность привода. Это вызвано тем, что при обрыве цепи задатчика 3 привод начинает самопроизвольно отрабатывать на уменьшение подачи топлива на двигатель, а при обрыве цепи датчика 4 обратной связи - на увеличение подачи топлива в двигатель.
Для этого в приводе предусмотрен канал защиты, включающий в себя логический элемент И 25 и запоминающий блок 26.
При исчезновении на входе И 25 одного из сигналов (от задатчика 3 или датчика 4) на выходе И 25 пропадает сигнал 25.1, поступавший ранее на входы блокировочных элементов И 6 и 7 следящего канала управления, а также на инверсный вход записи запоминающего блока 26.
Элементы И 6 и 7 блокируют работу следящего канала, а на выходе запоминающего блока 26 включается сигнализация 27 о неисправности следящего канала управления.
В этом случае оператор управляет двигателем 1 при помощи кнопочных замыкателей 12 и 13, подключенных к резервному источнику 14 электропитания при помощи переключателя 15.
При переводе переключателя 15 из положения 15.1 в положение 15.2 запоминающий блок 17 приводится в исходное положение, сигнал на его выходе отсутствует. При нажатии на замыкатель 12 или 13 сигнал с его выхода поступает на соответствующий логический элемент ИЛИ 8 или 9 и далее через блок 10 или 11 ограничения скорости отработки на исполнительный механизм 2. Изменение режима работы двигателя 1 осуществляется до тех пор, пока нажат замыкатель 12 или 13, при этом сигнал от следящего канала не поступает, так как на выходе запоминающего блока 17 появляется сигнал, блокирующий логические элементы И 6 и 7. Перевод блокирующего блока 17 в исходное положение и разблокировка следящего канала (при его исправности) осуществляется подачей сигнала на вход блока 17 от переключателя 15.
При восстановлении исправности следящего канала (восстановлении цепей задатчика 3 и датчика 4 обратной связи) сигнал с выхода запоминающего блока снимается нажатием дискретного органа 32 отмены команды, при этом разблокируются элементы И 6 и 7.
При нажатии кнопочного замыкателя 20 сигнал через блок 21 и логические элементы ИЛИ 18 и 19 блокирует работу следящего канала, а через логический элемент ИЛИ 22 подается сигнал на быстрое уменьшение режима работы двигателя 1 со скоростью, не зависящей от установленной для нормального режима работы двигателя 1 блоком 11 ограничения скорости перекладки. Перекладка исполнительного механизма 2 в сторону уменьшения частоты вращения двигателя 1 будет осуществляться до крайнего положения, пока дополнительный запоминающий блок 21 будет подавать сигнал на часть 2.2 ("меньше") исполнительного механизма 2.
Дополнительный запоминающий блок 21 приходит в исходное состояние при синхронизации задатчика 3 с датчиком 4 обратной связи после отработки исполнительного механизма 2 по сигналу замыкателя 20 или при переключении управления со следящего канала на резервный переключателем 15 в положение 15.2.
При необходимости аварийной остановки двигателя, например при пожаре в машинном отделении или когда не работают электрические каналы управления, остановка двигателя 1 выполняется при помощи канала аварийной остановки нажатием подпружиненного ручного органа 28.1 силового привода 28, подающего при этом силовое питание, например гидравлическое питание, от резервного источника 29 силового питания непосредственно в часть 2.2 исполнительного механизма 2, устанавливая механизм в крайнее положение нулевой подачи топлива независимо от воздействия других каналов управления.
При нажатии органа 28.1 замыкается концевой выключатель 28.2 и сигнал от резервного источника 14 электропитание поступает на вход записи запоминающего блока 30. Сигнал с выхода блока 30 поступает на инверсный вход И 6, блокируя следящий канал управления на увеличение частоты вращения двигателя 1, и через инверсный вход И 31, блокируя резервный канал управления на увеличение частоты вращения.
Сброс запоминающего блока 30 производится дискретным органом 32 сброс команды.
Таким образом, применение предложенного привода повысит надежность управления судовым двигателем, в том числе при возникновении на судне аварийных ситуаций.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ДИСТАНЦИОННЫЙ ПРИВОД ДЛЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2011 |
|
RU2466288C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ДИСТАНЦИОННЫЙ ПРИВОД ДЛЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ | 2003 |
|
RU2254502C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ДИСТАНЦИОННЫЙ ПРИВОД | 2003 |
|
RU2256106C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ДИСТАНЦИОННЫЙ ПРИВОД С НЕСКОЛЬКИМИ ПОСТАМИ УПРАВЛЕНИЯ | 2003 |
|
RU2256105C1 |
| Электрогидравлический дистанционный привод | 1975 |
|
SU557208A1 |
| Дистанционный привод управления судовым двигателем | 1988 |
|
SU1539141A1 |
| Система управления двигателем | 1987 |
|
SU1499316A1 |
| СИСТЕМА ДИСТАНЦИОННОГО АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ШАГОМ ВОЗДУШНЫХ ВИНТОВ | 2007 |
|
RU2340489C1 |
| СИСТЕМА ДИСТАНЦИОННОГО АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ШАГОМ ВОЗДУШНЫХ ВИНТОВ | 2000 |
|
RU2184664C2 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ДЛЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ | 2003 |
|
RU2251011C1 |
Изобретение относится к судостроению, в частности к дистанционным приводам и системам управления судовыми двигателями, преимущественно судовыми газотурбинными двигателями. Дистанционный привод управления судовым двигателем содержит основной канал управления, состоящий из логического блока, соединенного при помощи блока ограничения скорости отработки с исполнительным механизмом, кинематически связанным с датчиком обратной связи и задатчиком режима работы двигателя. Резервный канал управления состоит из кнопочных замыкателей, подключенных с одной стороны к резервному источнику электропитания, а с другой - к исполнительному механизму. Канал защиты привода от обрыва цепей задатчика и датчика обратной связи содержит последовательно соединенные логический элемент и запоминающий блок. Канал аварийной остановки двигателя содержит силовой привод с ручным подпружиненным органом управления, взаимодействующим с концевым выключателем. Достигается повышение надежности дистанционного привода управления судовым двигателем. 1 ил.
Дистанционный привод управления судовым двигателем, содержащий основной канал управления, состоящий из логического блока, соединенного при помощи блока ограничения скорости отработки с исполнительным механизмом, кинематически связанным с датчиком обратной связи, и задатчиком режима работы двигателя, по меньшей мере один резервный канал управления, состоящий из кнопочных замыкателей, подключенных с одной стороны к резервному источнику электропитания, а с другой через второй блок ограничения скорости отработки - к исполнительному механизму, соединенных при помощи логического элемента ИЛИ и запоминающего блока с блокировочными элементами И, включенными между логическим блоком и вторым блоком ограничения скорости отработки, и переключатель основного и резервного каналов управления, также привод снабжен дополнительным запоминающим блоком, сумматором сравнения, кнопочным замыкателем быстрого уменьшения частоты вращения двигателя, каналом экстренного уменьшения частоты вращения двигателя и шестью дополнительными логическими элементами ИЛИ, первый и второй из которых включены между блокировочными логическими элементами И и блоками ограничения скорости отработки, третий и четвертый - между блокировочными логическими элементами И и запоминающим блоком соответственно, пятый - между вторым блоком ограничения скорости отработки, дополнительным запоминающим блоком и исполнительным механизмом, шестой - между сумматором сравнения, кнопочным замыкателем каналов управления и дополнительным запоминающим блоком, при этом канал экстренного уменьшения частоты вращения двигателя включает в себя кнопочный замыкатель, подключенный с одной стороны к резервному источнику электропитания, а с другой - при помощи дополнительного запоминающего блока, третьего и четвертого дополнительных логических элементов ИЛИ к блокировочным логическим элементам И, а через пятый дополнительный логический элемент ИЛИ - к исполнительному механизму после блоков ограничения скорости отработки, причем вход сброса дополнительного запоминающего блока подключен при помощи шестого дополнительного элемента ИЛИ прямым входом к переключателю каналов управления, а инверсным - к выходу сумматора сравнения сигналов задатчика и датчика обратной связи основного канала управления, отличающийся тем, что привод снабжен каналом защиты от обрыва цепей задатчика и датчика обратной связи и каналом аварийной остановки двигателя, при этом канал защиты содержит последовательно соединенные логический элемент И и запоминающий блок, причем ко входам элемента И подключены параллельно выходы задатчика и датчика обратной связи, выход элемента И подключен к прямым входам блокировочных элементов И основного канала управления, выход запоминающего блока подключен к аварийной сигнализации, а канал аварийной остановки содержит силовой привод исполнительного механизма, подключенный входом к автономному источнику силового питания, выходом подключенный непосредственно к части исполнительного механизма, работающей на уменьшение подачи топлива в двигатель, и снабженный ручным подпружиненным органом управления, взаимодействующим с концевым выключателем, подключенным входом к резервному источнику электропитания, а выходом - к входу записи запоминающего блока канала аварийной остановки, выход которого подключен к инверсному входу блокировочного элемента И в основном канале управления увеличением частоты вращения двигателя и к инверсному входу дополнительного блокировочного логического элемента И, включенного в резервном канале управления между выходом кнопочного замыкателя на увеличение частоты вращения и входом элемента ИЛИ в канале управления увеличением частоты вращения между выходом блокировочного элемента И и блоком ограничения скорости отработки механизма, при этом входы сброса запоминающих блоков канала защиты и канала аварийной остановки подключены к резервному источнику электропитания при помощи дискретного органа отмены команды.
| Дистанционный привод управления судовым двигателем | 1988 |
|
SU1539141A1 |
| Электрогидравлический дистанционный привод | 1975 |
|
SU557208A1 |
| Устройство для определения фазочастотных характеристик электроэнергетических объектов | 1987 |
|
SU1506380A1 |

