Изобретение относится к электрогидравлическим дистанционным приводам, предназначенным для управления газотурбинными двигателями.
Известен электрогидравлический дистанционный привод, патент Японии №49-18678, н.кл. 54(8) Д, опубл. 1974 г., содержащий основные каналы управления, выполненные в виде логического блока, соединенного с основным электрогидравлическим распределителем, параллельно которым подключены резервные каналы. Однако в известном устройстве не обеспечено резервирование источников питания и распределителей в основных и резервных каналах, что снижает надежность привода.
Известен также электрогидравлический дистанционный привод по а.с. 557208 (прототип), содержащий основные каналы управления, выполненные в виде задатчика режима двигателя и датчика обратной связи, подключенных к логическому блоку, соединенному с основным электрогидравлическим распределителем, параллельно которым подключены резервные каналы, по крайней мере, один из которых выполнен в виде кнопочных замыкателей, подключенных с одной стороны к резервному источнику электропитания, а, с другой - к резервному электрогидравлическому распределителю, и соединенных при помощи логического элемента ИЛИ и запоминающего блока с блокировочными логическими элементами И, включенными между логическим блоком и основным электрогидравлическим распределителем.
Недостатком известного устройства по а.с. 557208 является его малое быстродействие при необходимости обеспечить высокую точность отработки исполнительного механизма в заданное положение.
Цель изобретения - обеспечение большого быстродействия привода при сохранении высокой точности его отработки.
Для этого в приводе, по меньшей мере, в одном из гидравлических каналов между основным электрогидравлическим распределителем и исполнительным механизмом установлен дроссель, параллельно которому к этому гидравлическому каналу подключен дополнительный электрогидравлический запорный клапан, исполнительный механизм выполнен с камерой в корпусе механизма, имеющей конусную поверхность, и снабжен тормозным устройством в виде подпружиненного тормозного конусного стакана, возвратно-поступательно перемещающегося на выходном валу и контактирующего с конусной тормозной поверхностью корпуса исполнительного механизма, причем гидравлическая камера тормозного устройства сообщена с напорной и сливной магистралями посредством гидравлических полостей дополнительного электрогидравлического распределителя, а в каждом из основных каналов управления между блокировочными логическими элементами И и электромагнитами основного распределителя включены формирователи сигналов узкой и широкой зоны рассогласования, подключенные попарно в каждом канале при помощи логических элементов ИЛИ к соответствующему электромагниту основного распределителя, при этом формирователи широкой зоны рассогласования обоих каналов подключены при помощи логического элемента ИЛИ параллельно к дополнительному электрогидравлическому запорному клапану и к дополнительному электрогидравлическому распределителю тормозного устройства исполнительного механизма.
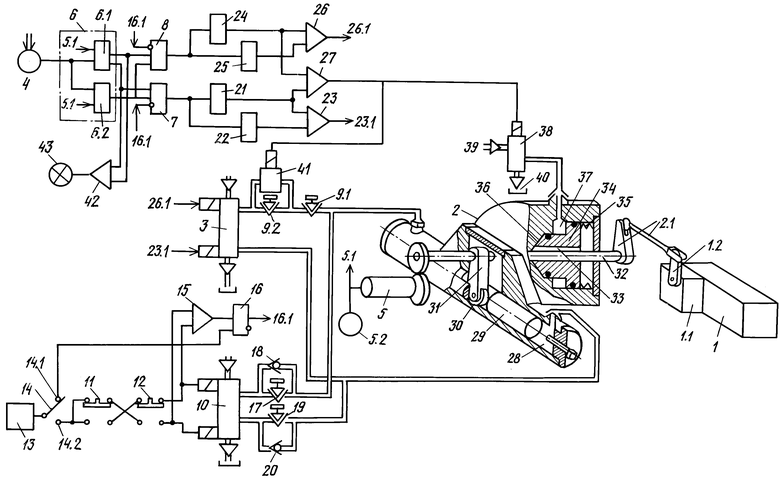
На чертеже показана функциональная схема устройства.
Газотурбинный двигатель 1 снабжен регулятором 1.1 подачи топлива в двигатель с рычагом 1.2, соединенным с исполнительным механизмом 2 кинематической связью 2.1.
Исполнительный механизм 2 подключен гидравлическими каналами к основному электрогидравлическому распределителю 3.
Задатчик 4 режимов работы двигателя 1 и датчик 5 обратной связи следящего канала управления подключены к входам логического блока 6.
Датчик 5 каналом 5.1 также подключен к указателю 5.2 положения исполнительного механизма.
Датчик 5 обратной связи кинематически связан с выходом вала исполнительного механизма 2.
Выходы логического блока 6 при помощи блокировочных логических элементов И 7 и 8 подключены к электромагнитам электрогидравлического распределителя 3.
Логический блок 6 содержит сумматор 6.1 сигналов от задатчика 4 и датчика 5 обратной связи (канал 5.1). Выходы сумматора 6.1 подключены к прямым входам блокировочных логических элементов И 7 и 8 и далее к электромагнитам распределителя 3 на управление регулятором подачи топлива в двигатель 1 в направлении "больше" - увеличение подачи топлива и "меньше" - уменьшение подачи топлива.
Логический блок 6 содержит также логический элемент И 6.2 защиты от обрыва цепи датчика 5 обратной связи и задатчика 4, подключенных к входам И 6.2.
Выход И 6.2 подключен к прямым входам блокировочных элементов И 7 и 8.
В гидравлическом канале между исполнительным механизмом 2 и электрогидравлическим распределителем 3 включены гидравлические дроссели 9.1 и 9.2, регулирующие скорость отработки механизма 2.
Электрогидравлический распределитель 10 резервного канала подключен гидравлическими каналами к исполнительному механизму 2 параллельно основному распределителю 3 между дросселем 9.1 и механизмом 2.
Кнопочные замыкатели 11 и 12 резервного канала управления двигателем 1 подключены к резервному источнику 13 электропитания при помощи переключателя 14 в его положении 14.2 и к электромагнитам распределителя 10. Параллельно замыкатели 11 и 12 подключены при помощи логического элемента ИЛИ 15 к входу записи запоминающего блока 16, выход 16.1 которого подключен к инверсным входам блокировочных логических элементов И 7 и 8.
Вход сброса запоминающего блока 16 подключен к переключателю 14 в его положении 14.1.
В гидравлических каналах между электрогидравлическим распределителем 10 и механизмом 2 включены гидравлический дроссель 17 с включенным параллельно ему невозвратным клапаном 18 и гидравлический дроссель 19 с аналогично включенным клапаном 20, регулирующие скорость отработки механизма 2.
С выхода блокировочного логического элемента И 7 сигнал поступает параллельно на формирователь 21 широкой зоны рассогласования и формирователь 22 узкой зоны рассогласования первого основного следящего канала управления. С выходов формирователей 21 и 22 через ИЛИ 23 сигнал 23.1 поступает на электромагнит распределителя 3, управляющий отработкой механизма 2 на увеличение режима.
С выхода блокировочного логического элемента И 8 сигнал поступает параллельно на формирователь 24 широкой зоны рассогласования и формирователь 25 узкой зоны рассогласования другого основного следящего канала управления.
С выходов формирователей 24 и 25 через ИЛИ 26 сигнал 26.1 поступает на электромагнит распределителя 3, управляющий отработкой механизма 2 на уменьшение режима.
Выходы формирователей 21 и 24 подключены также к входам логического элемента ИЛИ 27, на выходе которого формируется сигнал для ускоренной отработки исполнительного механизма 2.
Рабочая жидкость поступает в исполнительный механизм 2 от распределителя 3, например, в подпоршневую камеру 28 механизма 2. Поршень 29 при помощи ролика 30 и рычага 31 поворачивает вал 32 механизма, при помощи кинематических связей 2.1 и 1.2 подключенный к регулятору 1.1 двигателя 1.
На валу 32, на шпонке 33, насажен конусный стакан 34, который вращается вместе с валом 32 и имеет возможность перемещаться по шпонке 33 вдоль вала 32.
Стакан 34 своей конусной поверхностью прижат при помощи пружины 35 к конусной поверхности 36 внутренней камеры корпуса механизма 2. Внутри корпуса имеется камера 37 для подачи рабочей жидкости, под давлением которой пружина 35 сжимается и стакан 34 отводится от конусной поверхности корпуса механизма.
Камера 37 механизма 2 подключена к выходу электрогидравлического распределителя 38. При включенном состоянии распределителя 38 камера 37 через гидравлические полости распределителя 38 соединена с напорной гидравлической магистралью 39. При отключенном состоянии распределителя 38 камера 37 через распределитель 38 соединена со сливной магистралью 40.
Параллельно дросселю 9.2 включен электрогидравлический запорный клапан 41, который во включенном состоянии шунтирует дроссель 9.2.
Электромагниты распределителя 38 и клапана 41 подключены параллельно к выходу логического элемента ИЛИ 27.
Выходы сумматора 6.1 подключены также параллельно через логический элемент ИЛИ 42 к сигнализации 43, выполненной, например, в виде световой сигнализации.
Привод работает следующим образом.
При управлении двигателем 1 при помощи следящих каналов управления сигналы от задатчика 4 и датчика 5 обратной связи поступают в логический блок 6, на входы сумматора 6.1 и логического элемента И 6.2 защиты.
При наличии рассогласования между сигналами задатчика 4 и датчика 5 обратной связи, превышающего зону нечувствительности сумматора 6.1, на выходе сумматора появляется сигнал, поступающий на вход логического элемента 7 или 8.
При отсутствии на инверсных входах И 7 и 8 сигналов с выхода запоминающего блока 16, а также при наличии на прямых входах И 7 и 8 сигнала с выхода элемента И 6.2 защиты от неисправности (обрыва цепей) задатчика 4 и датчика 5 обратной связи, с выхода элемента 7 или 8 поступает сигнал на входы формирователей 21 широкой и 22 узкой зоны рассогласования или на входы формирователей 24 широкой и 25 узкой зоны рассогласования соответственно.
Узкая зона рассогласования может быть установлена, например, в размере 0,5 градуса поворота вала механизма 2, а широкая зона рассогласования - в размере, например, (2,5-3)° градусов поворота вала механизма 2.
Когда сигнал от сумматора 6.1 находится в пределах от 0,5 до 3 градусов поворота вала (по заданию), появляется сигнал на выходе формирователя узкой зоны 22 или 25, поступающий через элемент ИЛИ 23 (26) соответственно на соответствующий электромагнит распределителя 3.
Распределитель 3 подает рабочую жидкость из напорной магистрали 39 через дроссели 9.1 и 9.2 в камеру 28 механизма 2, что вызывает перемещение поршня 29, а через ролик 30 и рычаг 31 - поворот вала 32 механизма 2. При помощи кинематической связи 2.1 перемещается рычаг 1.2 регулятора 1.1 двигателя 1, изменяя подачу топлива в двигатель. Из другой полости механизма 2 рабочая жидкость через распределитель 3 отводится на слив, в гидробак 40.
Поворот вала 32 производится до тех пор, пока сигнал с выхода датчика 5 обратной связи, кинематически связанного с валом 32, сравняется на входе сумматора 6.1 с сигналом с выхода задатчика 4.
При этом поворот вала 32 производится с малой скоростью, с подтормаживанием вала 32 за счет соприкасания под воздействием пружины 35 конусной поверхности стакана 34 с конусной поверхностью 36 внутренней камеры в корпусе механизма 2. Этим обеспечивается необходимая точность отработки исполнительного механизма.
Когда сигнал от сумматора 6.1 превышает (по заданию) 3 градуса поворота вала 32 механизма 2, появляется также сигнал на выходе формирователя широкой зоны 21 (24), поступающий через логический элемент ИЛИ 23(26) соответственно на соответствующий электромагнит распределителя 3, а также через логический элемент ИЛИ 27 на электромагнит запорного электромагнитного клапана 41 и на электромагнит дополнительного электромагнитного распределителя 38.
Электромагнитный клапан 41 шунтирует дроссель 9.2, и рабочая жидкость поступает в полость механизма 2 только через дроссель 9.1, минуя дроссель 9.2.
Электромагнитный распределитель 38 подает рабочую жидкость от напорной магистрали 39 в камеру 37 механизма 2. При этом стакан 34 сдвигается по шпонке 33 вдоль вала 32 вправо, сжимая пружину 35, и подтормаживание вала 32 прекращается.
Вал 32, связанные с ним кинематической связью 2.1 рычаг 1.2 регулятора 1.1 и датчик 5 обратной связи перемещаются с максимально допустимой скоростью отработки механизма 2 (устанавливается дросселем 9.1) до тех пор, пока зона рассогласования между задатчиком 4 и датчиком 5 достигнет величины менее 3 градусов поворота вала 32 (по заданию). При этом сигнал с выхода формирователя 21 (24) широкой зоны рассогласования снимается, клапан 41 закрывается, а распределитель 38 приходит в исходное положение, соединяя камеру 37 в корпусе механизма 2 со сливом в гидробак 40.
Дальнейшая отработка привода в заданное задатчиком 4 положение продолжается по алгоритму, приведенному ранее для узкой зоны рассогласования.
При выходе из строя (обрыва цепей) задатчика 4 или датчика 5 обратной связи на выходе элемента ИЛИ 6.2 снимается выходной сигнал, при этом элементы И 7 и 8 блокируют работу основного следящего канала. Одновременно через элемент ИЛИ 42 включается сигнализация 43 о наличии рассогласования следящего канала управления, величина рассогласования определяется сравнением положения задатчика 4 и положения датчика 5 обратной связи по указателю 5.1.
В этом случае оператор управляет двигателем 1 при помощи замыкателей 11 и 12, подключенных к резервному источнику 13 электропитания переводом переключателя 14 в положение 14.2.
При нажатии на замыкатель 11 или 12 сигнал с его выхода поступает на соответствующий электромагнит распределителя 10 (при нажатии на оба замыкателя они обесточивают друг друга). Распределитель 10 подает рабочую жидкость через дроссель 17 или 19 на механизм 2, воздействующий на регулятор 1.1 двигателя 1.
Другой дроссель 19 или 17 шунтируется невозвратным клапаном 20 или 18 соответственно.
Одновременно при нажатии замыкателя 11 или 12 через элемент ИЛИ 15 подается сигнал на вход записи запоминающего блока 16, сигнал с выхода которого поступает на инверсные входы И 7 и 8, блокируя работу следящих каналов управления.
Перевод запоминающего блока 16 в исходное положение и разблокировка следящих каналов осуществляется подачей сигнала на вход сброса блока 16 от переключателя 14 переводом его в положение 14.1 на отключение питания резервного канала.
Применение предложенного электрогидравлического привода повышает быстродействие привода и обеспечивает высокую точность отработки исполнительного механизма.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ДИСТАНЦИОННЫЙ ПРИВОД С НЕСКОЛЬКИМИ ПОСТАМИ УПРАВЛЕНИЯ | 2003 |
|
RU2256105C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ДИСТАНЦИОННЫЙ ПРИВОД ДЛЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2011 |
|
RU2466288C1 |
| Электрогидравлический дистанционный привод | 1975 |
|
SU557208A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ДИСТАНЦИОННЫЙ ПРИВОД ДЛЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ | 2003 |
|
RU2254502C1 |
| ДИСТАНЦИОННЫЙ ПРИВОД УПРАВЛЕНИЯ СУДОВЫМ ДВИГАТЕЛЕМ | 2003 |
|
RU2238880C1 |
| СИСТЕМА ДИСТАНЦИОННОГО АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ШАГОМ ВОЗДУШНЫХ ВИНТОВ | 2007 |
|
RU2340489C1 |
| СИСТЕМА ДИСТАНЦИОННОГО АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ШАГОМ ВОЗДУШНЫХ ВИНТОВ | 2000 |
|
RU2184664C2 |
| Автоматическая дистанционная система управления для двигателя внутреннего сгорания | 1980 |
|
SU926341A1 |
| Дистанционный привод управления судовым двигателем | 1988 |
|
SU1539141A1 |
| Дистанционный привод управления главным судовым двигателем /варианты/ | 1983 |
|
SU1191357A1 |
Изобретение относится к области машиностроения, преимущественно к электрогидравлическим приводам для управления газотурбинными двигателями. Привод содержит основные каналы управления, выполненные в виде задатчика и датчика обратной связи, подключенных при помощи логического блока к основному электрогидравлическому распределителю, параллельно которому подключены резервные каналы, по крайней мере один из которых выполнен в виде кнопочных замыкателей, подключенных с одной стороны к резервному источнику электропитания, а с другой - к резервному электрогидравлическому распределителю, и соединенных при помощи логического элемента ИЛИ и запоминающего блока с блокировочными логическими элементами И, включенными между логическим блоком и основным электрогидравлическим распределителем, при этом по меньшей мере в одном из гидравлических каналов между основным электрогидравлическим распределителем и исполнительным механизмом установлен дроссель, параллельно которому к этому гидравлическому каналу подключен дополнительный электрогидравлический запорный клапан, исполнительный механизм выполнен с камерой в корпусе механизма, имеющей конусную тормозную поверхность, и снабжен тормозным устройством в виде подпружиненного тормозного конусного стакана, возвратно-поступательно перемещающегося на выходном валу и контактирующего с конусной тормозной поверхностью корпуса исполнительного механизма, причем гидравлическая камера тормозного устройства сообщена с напорной и сливной магистралями посредством гидравлических полостей дополнительного электрогидравлического распределителя, а в каждом из основных каналов управления между блокировочными логическими элементами И и электромагнитами основного распределителя включены формирователи сигналов узкой и широкой зоны рассогласования, подключенные попарно в каждом канале при помощи логических элементов ИЛИ к соответствующим электромагнитам основного распределителя, при этом формирователи широкой зоны рассогласования обоих каналов подключены при помощи логического элемента ИЛИ параллельно к дополнительному электрогидравлическому запорному клапану и к дополнительному электрогидравлическому распределителю тормозного устройства исполнительного механизма. Технический результат - повышение быстродействия привода и повышение точности его отработки. 1 ил.
Электрогидравлический дистанционный привод, преимущественно для газотурбинных двигателей, содержащий основные каналы управления, выполненные в виде задатчика и датчика обратной связи, подключенных при помощи логического блока к основному электрогидравлическому распределителю, параллельно которым подключены резервные каналы, по крайней мере, один из которых выполнен в виде кнопочных замыкателей, подключенных с одной стороны к резервному источнику электропитания, а с другой — к резервному электрогидравлическому распределителю, и соединенных при помощи логического элемента ИЛИ и запоминающего блока с блокировочными логическими элементами И, включенными между логическим блоком и основным электрогидравлическим распределителем, отличающийся тем, что, по меньшей мере, в одном из гидравлических каналов между основным электрогидравлическим распределителем и исполнительным механизмом установлен дроссель, параллельно которому к этому гидравлическому каналу подключен дополнительный электрогидравлический запорный клапан, исполнительный механизм выполнен камерой в корпусе механизма, имеющей конусную тормозную поверхность, и снабжен тормозным устройством в виде подпружиненного тормозного конусного стакана, возвратно-поступательно перемещающегося на выходном валу и контактирующего с конусной тормозной поверхностью корпуса исполнительного механизма, причем гидравлическая камера тормозного устройства сообщена с напорной и сливной магистралями посредством гидравлических полостей дополнительного электрогидравлического распределителя, а в каждом из основных каналов управления между блокировочными логическими элементами И и электромагнитами основного распределителя включены формирователи сигналов узкой и широкой зоны рассогласования, подключенные попарно в каждом канале при помощи логических элементов ИЛИ к соответствующему электромагниту основного распределителя, при этом формирователи широкой зоны рассогласования обоих каналов подключены при помощи логического элемента ИЛИ параллельно к дополнительному электрогидравлическому запорному клапану и к дополнительному электрогидравлическому распределителю тормозного устройства исполнительного механизма.
| Электрогидравлический дистанционный привод | 1975 |
|
SU557208A1 |
| Дистанционный привод управления судовым двигателем | 1988 |
|
SU1539141A1 |
| Электрогидравлическое загрузочное устройство | 1989 |
|
RU2005227C1 |
| ЭЛЕКТРОМАГНИТНЫЙ СЕПАРАТОР | 2012 |
|
RU2516608C1 |
| Устройство для определения фазочастотных характеристик электроэнергетических объектов | 1987 |
|
SU1506380A1 |

