1
Изобретение относится к двигателестроению, а именно к системам дистанционного управления для двигателя внутреннего сгорания.
По основному авт.св. N1 580338 известна система дистанционного згправления для двигателя внутреннего сгорания, содержащая задатчик с логическим блоком управления, связанным двумя каналами с преобразователем, подключенным к сервомеханизму органа управления оборотами, соединенного при помощи датчика положения с логическим блоком, и снабженная двумя парами последовательно установленных логических элементов И н ИЛИ, включенных соответственно в каналы связи логического блока и преобразователя и связанных с датчиком положения, который выполнен в виде кулачкового механизма и взаимодействующего с ним переключателя. Наличие логического блока и его связи с датчиком положения позволяют обеспечить надежное управление двигателем 1 .
Однако для перемещения кулачкового механизма в известной системе требуется большое усилие, что снижает ее технологичность.
Цель изобретения - повыщение технологичности.
Поставленная цель достигается тем, что кулачковый механизм вьшолнен с валиком, кинематически связанным с сервомеханизмом и снабженным свободно установленными на валике кулачками и разделительньп«и шайбами, размещенными вДоль. оси валика между, кулачками.
Валик вьшолнен с продольным пазом, в котором размещена ступенчатая шпонка, снабженная углублениями для установки кулачков и выступами для разделительных шайб, и снабжен гайкой, связанной через прижимную пружину с разделительными шайбами и кулачками.
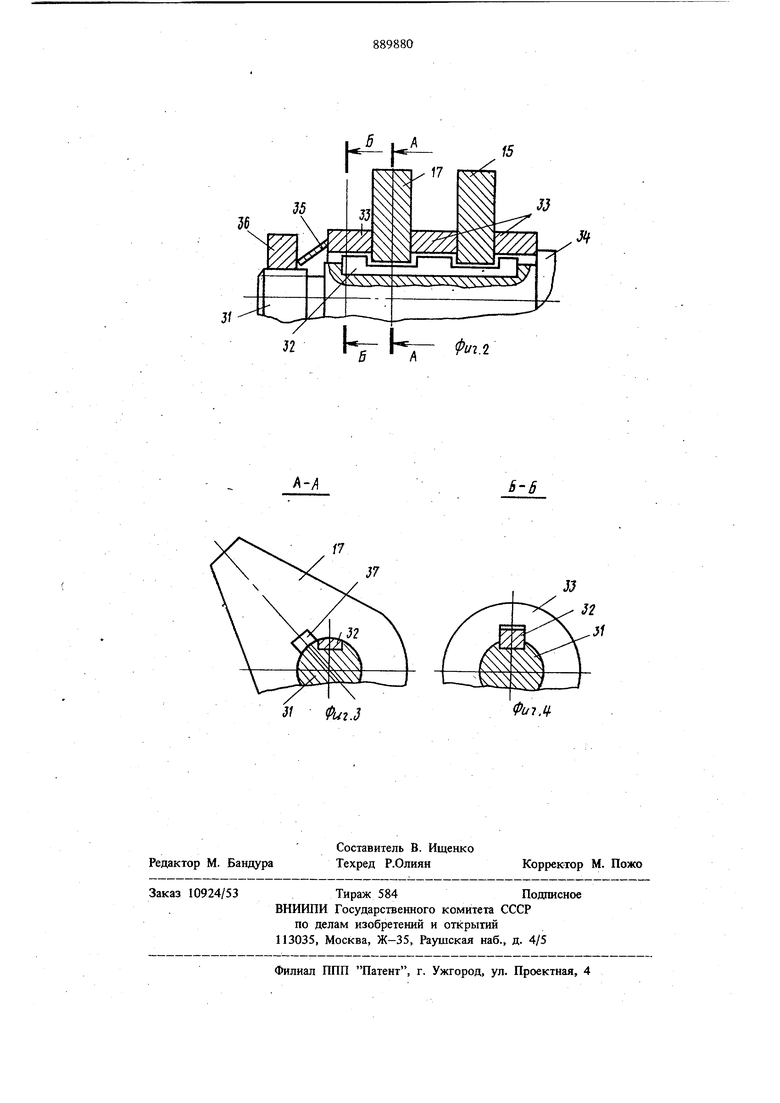
На фиг. 1 приведена функщюнальная схема системы; на фиг. 2 - схема установки кулачков и разделительных шайб на валике; на фиг. 3 - разрез А-А на фиг. 2 (по месту установки кулачка); на фиг. 4 - разрез Б-Б на фиг. 2 (по месту установки разделительной шайбы). 38 Двигатель 1 снабжен местным постом 2 уп равления с органом 3 управле шя оборотами и органом 4 управления переключением ревер муфты. С органом 4 кинематически соединен сервомеханизм 5, выходной вапик которого снабжен кулачковым механизмом, содержащим кулачок 6, взаимодействующий в положении Вперед (В) с переключателем- 7, кулачок 8 - в положении Холостой ход (ХХ) с переключателем 9 и кулачок 10 - в положе1ши Назад (Я) с переключателем 11. С органом 3 соединен сервомеханизм 12 при помощи кшюматической связи 13, снабженной упругим звеном 14 переменной длины. Сервомеханизм 12 снабжен датчиком положения, выполненным в виде кулачкового мехаш1зма, взаимодействующего .в положении Пуск (Упор реверсирования) с переключате.пями .{ку лачок 15 с переключателем 16 и кзлачок 17 - с переключателем 18). Сервомеханизм 12 подд ;}почеи гидравлическими каналами Б (больше) и М (меньше) к преобразователям 19 и 20. Для регулирования скорости отработки сервомеханизма 12 в одном из гидравлических каналов встроены дроссели 21 и 22. Задатчик 23 подключен к преобразователям при помощи логического блока 24- управления, связанного двумя каналами (больше и меньше) с преобразователем 19 и ощшм каналом с преобразователем 20. В каналы связи логического блока 24 с преобразователем 19 включены две пары последовательно установленных логических элементов И и ИЛИ, из которых И 25 и ИЛИ 26 включены в канал М, а И 27 и, ИЛИ 28 включены в канал Б. IS канал связи логического блока 24 с преобразователем 20 включены логические элементы И 25 и ИЛИ 29. Ддтчик положения сервомеханизма 12 связан с логическим блоком 24. Сервомехага1зм 5 подключен гидравлическими каналами к блоку 30 преобразователей, связанному с логическим блоком 24. Валик 31 с резьбовым кондом, кинематически связанный с сервомеханизмом 12, в своем продолытом пазе содер жит ступенчатую шпонку 32 с выступами и углублениями. Кулачки 15 и 17, свободноустановлеш1ые на валик 31, разделены между .собой и валиком разделительными .шайбами 33, одна из которых упирается в выступ 34 валика 31, а другая связана с кулачками и шайбами через прижимную пружину 35 и гайку Зб. Кулачки 15 и 17 снабжены отверстиями по форме валика 31 и 1ппонки 32 (на фиг. 3 показано отверстие 37 в кулачке 17), позволяющие установить кулачки на валик при установленной шпонке 32. Ана логичные отверстия вьшолнены и в шайбах 33. Кулачки расположены на валике в местах, где тело гппонки срезано заподлицо с валиком. Шайбы 33 расположены на валике в местах, где тело шпонки выступает из валика. Система работает следующим образом. При получении команды от задатчика 23 логический блок 24 преобразует ее в сигналы для блока 30 преобразователей, и преобразователей 19 и 20. При помощи блока 20 преобразователей, соединенного гидравлическими каналами с сервомеханизмом 5, последний устанавливает орган 4 местного поста 2 двигателя 1 в одно из положений (Я, XX или 5/. Б положении 5 разрешается управление органом 3 управления оборотами. При подаче задатчика 23 через логический блок 24 и ИЛИ 28 сигнала по канаЛу Б па преобразователь 19, последний подает рабочую жидкость в сервомеханизм 12, перемещая его выходной орган и через кинематическую связь 13 - орган 3 местного поста 2 двигателя 1 на увеличение числа оборотов. При подаче сигнала через блок 24 и ИЛИ 26 по каналу М на преобразователь 19 орган 3 перемещается на уменьшение числа оборотов. При плавном уменьшении частотывращеш1я двигателя (сигнал на преобразователь 20 пе поступает от блока 24 и рабочая жидкость в сервомехаьшзм 12 поступает через два дросселя 21 и 22), прекращение перемещения органа 3 в точке Пуск (Упор реверсирова1шя) достигается при отпускании переключателей 16 и 18, взаимодействующих в этой точке с кулачками. 15 и 17 соответственно. Поскольку взаимная фиксаш1я органов 3 и 4 местного поста 2 жесткая, при неточной остановке сервомеханизма 12 может произойти заклинивашю блокировочного механизма поста 2 или повышенные механические напряжеш1я в сервомеханизме 12, кинематической срязи 13 или посту 2. Для исключения зтого в кинематическую связь включено упругое звено 14. Оно позволяет изменить длину кинематической связи 13, не создавая нагрузок на пост 2 или сервомеханизм 12. При быстром уменьшении частоты вращения двигателя (сигнал на преобразователь 20 поступает от блока 24 через И 25 только при нажатом переключателе 16, рабочая жидкость подается в сервомеханизм 12 через один дроссель 22, а дроссель 21 шунтируется открытым преобразователем 20) возможен излишний выбег сервомехагшзма 12, при этом устанавливается малая частота вращений двигателя, при которых двигатель при реверсировании может заглохнуть. Во избежание этого при замьпсании переключателя 18 подается сигнал через И 27 при наличии на его втором входе сигнала от переключателя 7 В через ИЛИ 28 по каналу Б на преобразователь 19. Сигнал с преобразователя 20 при этом снимается и происходит медленное увеличение числа оборотов до момента размыкания переключателя 18.
Регулировка кулачков 15 и 17 производится по положению откидного упора на двигателе, выставленного при работе двигателя на пусковых оборотах по положению регулятора двигателя.
Регулировка требуется .достаточно точная, чтобы обеспечить опускание переключателей 16 и 18 в точке снятия блокировки между органами 3 и 4 местного поста 2. Точность регулировки кулачков 15 и 17 может быть обеспечена только путем бесступенчатой их регулировки. Кроме того, необходимо обеспечить жесткую фиксацию кулачков в любом месте после их регулировки и независимую регулировку кулачков друг от друга. Перерегулировка кулачков может потребоваться, например, в случае замены регулятора двигателя, измене1шя характеристик пружин и кинематических пар регулятора вследствие частичного износа в процессе работы и т.п.
Для обеспечения, этих требований в предложенной системе в валик 31, кинематически связанный с выходом сервомеханизма 12, вставлена в продольном пазу ступенчатая щпонка 32, соответствующая по длине пакету кулачков и 17 для механизма 12, 6, 8 и 10 для механизма 5 и т.п.) и разделительных шайб 33. При сборке на валик 31 одевается Ьначале шайба 33, затем кулачок, например 15, снова шайба 33, кулачок, например 17, и т.д. Когда установлен последний кулачок, снаружи снова устанавливается последняя шайба 33, прижимная пружина 35 и гайка 36. Шайбы 33 устанавливаются в местах выступающих частей щпонки 32, а кулачки в местах, где шпонка 32 срезана заподлицо с валиком. Таким образом, когда
пружина 35 не затянута гайкой 36, кулачки могут проворачиваться от руки вокруг валика. При этом при повороте кулачка 15 (17) кулачок 17 (15) остается неподвижным, так как они разделены неподвижной шайбой 33. После настройхи кулачков затягивают гайкой 36 пружину 35, сжимая пакет кулачков и шайб. Шайбы 33 удерживаются при работе неподвижными за счет шпонки 32, а кулачки - за счет трения о поверхность шайб 33. После поджатия гайка 36 может быть допол1штельно зашплинтована. Пружина 35 необходима для компенсации малых перемещений гайки при работе двигателя, при ее
шплинтовке и т.п.
Применение системы обеспечивает точную бесступенчатую независимую регулировку кулачков и надежную фиксацию их в любом установленном положении.
Формула изобретения
1.Система дистанционнбго управления для двигателя внутреннего сгорания по авт.св. N1580338,
отличающаяся тем, что, с целью повьпцения технологичности, кулачковый механизм вьшолнен с валиком, кинематически связанным с сервомеханизмом и снабженным свободно установленными на валике кулачками и разделительными шайбами, размещенными вдоль оси валика между кулачками.
2.Система по п. 1, отличающаяся тем, что валик вьшолнен с продольным пазом, в котором размещена ступенчатая шпонка, снабженная углублениями для установки кулачков и выступами для разделительных шайб, и снабжен гайкой, связанной через прижимную пружину с разделительными шайбами и кулачками.
Источники информации,
принятые во внимание при экспертизе
1. Авторское свидетельство СССР № 580338, кл. F 02 D 1/12, 1977.
r Г Фиг.2
б , А
K-KI I/ I Л
15
I rrrtm . 1


| название | год | авторы | номер документа |
|---|---|---|---|
| Система дистанционного управления для двигателя внутреннего сгорания | 1975 |
|
SU580338A1 |
| Система дистанционного управления для двигателя внутреннего сгорания | 1979 |
|
SU855238A2 |
| Автоматическая дистанционная система управления для двигателя внутреннего сгорания | 1980 |
|
SU926341A1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ГАЗОТУРБИННЫМ ДВИГАТЕЛЕМ | 2003 |
|
RU2256811C1 |
| Система дистанционного и автоматического управления двигателем внутреннего сгорания | 1982 |
|
SU1059237A1 |
| Устройство для дистанционного управления многомашинным агрегатом | 1978 |
|
SU748348A1 |
| Силовая установка | 1979 |
|
SU802573A1 |
| СИСТЕМА ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ДЛЯ ДВИГАТЕЛЕЙ ВНУТРЕННЕГО СГОРАНИЯ | 2003 |
|
RU2251011C1 |
| Система дистанционного управления двигателем с реверс-редукторной передачей | 1975 |
|
SU699218A1 |
| Двигатель внутреннего сгорания | 1981 |
|
SU981655A1 |

А-А
17
6-6
JJ
t/7.l
