Изобретение относится к области приборостроения, преимущественно гироскопического, и может быть использовано при производстве инерциальных навигационных систем (ИНС) на динамически настраиваемых гироскопах (ДНГ).
Известен способ уменьшения изменения во времени скорости дрейфа ДНГ в запусках, применяемых в ИНС, путем использования при изготовлении технологической операции газовой очистки его внутренней полости и заполнения рабочим газом. В известном способе заполнения газом динамически настраиваемых гироскопов (см. авторское свидетельство SU №1713342 по кл. G01C 25/00 от 15 октября 1991 г.) очистка внутренней полости осуществляется ее вакуумным обезгаживанием, откачкой образовавшейся газовой смеси, продувкой внутренней полости ДНГ водородом, последующим ее заполнением рабочим газом и герметизацию. Однако ДНГ имеет шарикоподшипниковую опору, в которой используют консистентную смазку, что не позволяет проводить более высокую степень очистки внутренней полости в связи с тем, что при этом происходит интенсивное испарение смазки и не обеспечивается требуемый ресурс ДНГ. При изготовлении ДНГ может возникать монотонное изменение во времени скорости дрейфа при запуске, которое ограничивает их выпуск. Это изменение скорости дрейфа обусловлено возникновением в ДНГ газодинамического момента, действующего на его ротор, вследствие происходящего в процессе наработки изменения состояния газовой среды в его внутренней полости, связанного с газовыделениями из смазки шарикоподшипниковой опоры и других элементов.
Для уменьшения возникающего монотонного изменения скорости дрейфа в запуске используют методы ее регулировки на стадии загерметизированного ДНГ. Так в известном способе регулировки трехстепенного гироскопа (см. авторское свидетельство SU №1612700 по кл. G01C 19/22 от 20 января 1994 г.) с целью уменьшения погрешности, обусловленной газодинамическим моментом, нагрев кожуха ДНГ осуществляют локально и несимметрично, при этом минимальное динамическое изменение скорости дрейфа по одной оси достигается нагревом кожуха по перпендикулярной оси. Для реализации этого способа ДНГ должен иметь специальную систему термостатирования, позволяющую неравномерно нагревать локальные зоны кожуха и регулировать температуру их нагрева. В стандартных ДНГ, которые не имеют такой системы термостатирования, регулирование монотонного изменения скорости дрейфа с помощью системы термостатирования не представляется возможным.
За прототип взят способ регулировки динамически настраиваемого гироскопа (см. авторское свидетельство SU №1245046 по кл. G01C 25/00 от 15 марта 1986 г.). В этом способе предлагается уменьшение изменения скорости дрейфа, вызванного нестационарными газодинамическими моментами проводить путем изменения взаимного положения корпуса и ротора ДНГ, работающего в режиме обратной связи по току датчика момента. Для этого вводят разные постоянные смещения в электрические связи между датчиками угла и датчиками моментов ДНГ до достижения минимального изменения скорости дрейфа во времени при запуске. Данное смещение реализуют с помощью мостовой схемы датчиков углов ДНГ, которая располагается на его корпусе и является одним целым с ним. При регулировке, изменяя параметры мостовой схемы, например, величину ее сопротивлений, вызывают появление сигналов на датчиках углов ДНГ, которые по цепи обратной связи поступают в его датчики моментов. Датчики моментов создают момент, который поворачивает ротор ДНГ в положение, при котором сигнал рассогласования на датчиках углов исчезнет. Изменение углового положения ротора по отношению к корпусу и валу двигателя вызовет изменение газодинамического момента, действующего на ротор. Изменяя таким образом угловое положение ротора, можно найти такое его положение, при котором монотонное изменение скорости дрейфа ДНГ при запуске, вызванное нестационарным газодинамическим моментом, становится минимальным.
В известном способе после проведения автономной регулировки ДНГ по определению углового положения ротора путем подбора параметров мостовой схемы датчиков угла, которое минимизирует монотонное изменение скорости дрейфа в запуске, мостовую схему датчиков углов герметизируют, заливая герметиком, и доступ к элементам схемы становится невозможным. В таком окончательном виде ДНГ устанавливают в гироплатформу ИНС. Тепловое поле ДНГ в гироплатформе отличается от его теплового поля при автономных регулировках и испытаниях вследствие воздействия на него внутренних источников возмущения гироплатформы, обусловленных, например, температурным влиянием источников тепла гироплатформы (нагреватели системы термостатирования гироплатфомы, соседний термостатируемый ДНГ, обдув вентилятора гироплатформы). Изменение теплового поля ДНГ вызовет его температурные деформации, например, деформацию его кожуха, что приведет к изменению газодинамических зазоров и возможному увеличению монотонной скорости дрейфа. К увеличению монотонной скорости дрейфа ДНГ при запуске ИНС также приводит изменение состояния его газовой среды вследствие гажения элементов, особенно консистентной смазки шарикоподшипниковой опоры в процессе наработки. Если величина монотонной скорости дрейфа ДНГ в составе ИНС превысила пределы допуска, то возникают завышенные погрешности определения ИНС параметров ориентации и навигации, но подрегулировать его в составе системы не представляется возможным. В этом случае приходится снимать с ИНС гироплатформу и извлекать из нее ДНГ, который заменяют на другой соответствующий требуемым параметрам. При малой наработке снятый ДНГ пытаются восстановить путем дополнительной газовой очистки, но не всегда это удается выполнить. Таким образом если в отрегулированном известным способом ДНГ путем изменения параметров мостовой схемы при работе в составе ИНС возникает завышенное изменение монотонной скорости дрейфа, то такой ДНГ, как правило заменяют на новый, что увеличивает трудоемкость изготовления системы, а при отказе в эксплуатации стоимость ее ремонта. Отсутствие при использовании известного способа возможности подрегулировать монотонное изменение скорости дрейфа ДНГ в составе ИНС, приводит к возможной работе системы при предельных погрешностях, что снижает точность ориентации и навигации объекта.
Техническим результатом, который может быть получен при осуществлении настоящего изобретения, является обеспечение возможности регулировки ДНГ в составе ИНС, позволяющей уменьшить монотонное изменение газодинамической скорости дрейфа ДНГ и обусловленных ею погрешностей выработки ИНС параметров ориентации и навигации без замены гироскопа в системе.
Технический результат достигается тем, что в известном способе регулировки динамически настраиваемого гироскопа, включающем изменение взаимного углового положения элементов корпуса гироскопа и его ротора, дополнительно предварительно устанавливают инерциальную навигационную систему на динамически настраиваемых гироскопах, имеющую термостатируемую, управляемую в азимуте и стабилизированную в плоскости горизонта гироплатформу с четырехосным кардановым подвесом, включающим дополнительную следящую раму, на горизонтальное неподвижное относительно Земли основание таким образом, чтобы ось дополнительной рамы, направляемая на объекте в сторону движения, была ориентирована на Север, запускают инерциальную навигационную систему, с включением системы термостатирования, производят выставку стабилизированной площадки гироплатфомы в плоскость горизонта и по направлению на Север, когда ее датчики углов рыскания, крена, тангажа показывают нулевые значения, далее удерживают в этом пространственном положении стабилизированную площадку, подают с помощью вычислителя инерциальной навигационной системы на вход усилителя канала курсовой стабилизации гироплатформы и на вход усилителя электрической пружины гироскопа этого канала сигналы уставок соответственно U1, UЭП, а на вход усилителей стабилизации каналов крена и тангажа гироплатформы сигналы уставок соответственно U2, U3, и с момента готовности инерциальной навигационной системы измеряют в течение одного часа изменения во времени параметров ориентации и навигации, вырабатываемых инерциальной навигационной системой, аналогично выполняют другие запуски с измерениями параметров ориентации и навигации при одинаковых температурах окружающей среды и начальных тепловых состояниях инерциальной навигационной системы, но при других значениях сигналов уставок, находят сигналы уставок U10, UЭП0, U20, U30, минимизирующие погрешности выработки инерциальной навигационной системой параметров ориентации и навигации при запуске, а в рабочих режимах инерциальной навигационной системы подают, сформированные в вычислителе, сигналы уставок:
U1Р=U10 в канал курсовой стабилизации;
Uэпр=UЭП0 в канал электрической пружины гироскопа курсового канала;
U2P=U20Cosψг+U30Sinψг в канал стабилизации по крену;
U3P=U30Cosψг-U20Sinψг в канал стабилизации по тангажу,
где ψг - угол поворота рамы внутреннего крена относительно стабилизированной площадки, который измеряют с помощью датчика угла гироплатформы этого поворота.
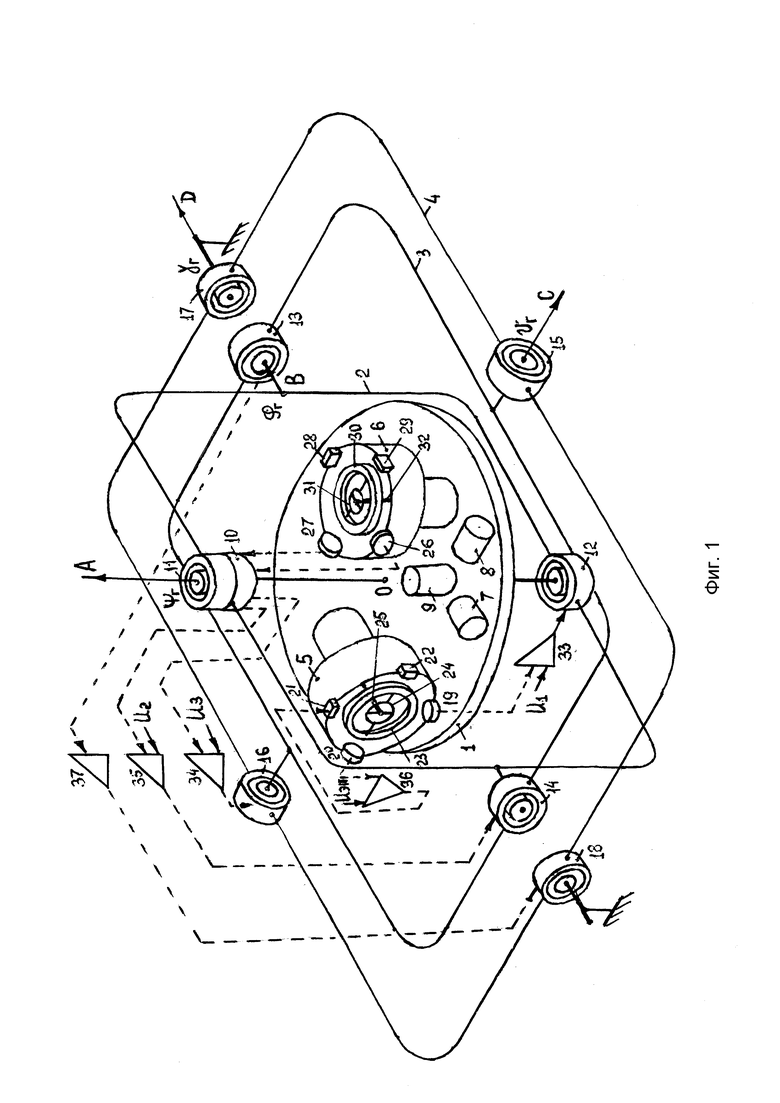
На фиг. 1 представлена кинематическая схема гироплатформы инерциальной навигационной системы на ДНГ с четырехосным кардановым подвесом, который имеет: ось OA подвеса стабилизированной площадки (СП), ось ОВ подвеса рамы внутреннего крена (РВК), ось ОС подвеса рамы тангажа (РТ), ось ОД подвеса дополнительной рамы (ДР). Гироплатформа содержит: стабилизированную площадку 1, расположенную в кардановом подвесе, раму внутреннего крена 2, раму тангажа 3, дополнительную раму наружного крена 4. На СП 1 расположены: ДНГ 5 курсового канала, ДНГ 6 каналов крена и тангажа, акселерометры 7 и 8 с горизонтальными осями чувствительности, акселерометр 9 с вертикальной осью чувствительности. По оси OA стабилизированной площадки установлены: датчик 10 угла поворота ψг РВК относительно СП, преобразователь координат 11 и разгрузочный датчик момента 12 системы стабилизации. По оси ОВ рамы внутреннего крена установлены: датчик угла 13 поворота ϕг РТ относительно РВК и разгрузочный датчик момента 14. По оси ОС рамы тангажа установлены датчик угла 15 поворота υг ДР относительно РТ и разгрузочный датчик момента 16. По оси ОД дополнительной рамы расположены датчик угла 17 поворота γг объекта относительно ДР, датчик момента 18 следящей системы канала ДР. В состав ДНГ 5 и 6 входят соответственно датчики угла 19,20 и 26, 27, датчики моментов 21, 22 и 28, 29, ротора 23 и 30, внутренние кардановые подвесы 24 и 31 с кардановыми рамками и упругими торсионами, валы 24 и 32 двигателей ДНГ. Система стабилизации СП имеет усилители стабилизации курсового канала 12 и каналов тангажа и крена соответственно 34 и 35, усилитель 36 электрической пружины ДНГ 5 и усилитель 37 канала следящей системы ДР.
Гироплатформа на ДНГ является индикаторной. При действии вокруг осей карданового подвеса вешних возмущающих моментов СП отклоняется от заданного положения. Углы отклонения СП измеряются с помощью датчиков углов ДНГ. Сигналы с датчиков углов ДНГ поступают на усилители, а с них - на обмотки датчиков моментов стабилизации, моменты которых уравновешивают внешние возмущающие моменты. Удерживая СП в заданном пространственном положении, с точностью до ошибок стабилизации, каждый из двух ДНГ, расположенных на СП, имеет две измерительные оси. Одна из измерительных осей ДНГ 5 является избыточной. Для исключения возможности ротору 23 ДНГ 5 лечь на упор, что повлечет отказ системы стабилизации, в избыточном канале ДНГ 5 применена система электрической пружины, включающей датчик угла 20, усилитель 36 и датчик момента 21.
При повороте объекта и корпуса гироплатформы относительно оси OA СП на угол ψг вместе с ними развернутся ось ОВ подвеса РВК и ось ОС подвеса РТ. При наличии угла ψг разворот СП относительно, например, оси РТ будет измеряться не только датчиком угла 27 ДНГ 6, но и его датчиком угла 26, в результате чего появится нежелательная взаимосвязь между каналами стабилизации, которая при больших величинах ψг приведет к неустойчивости системы стабилизации. Для исключения такой возможности на ось OA стабилизированной площадки установлен преобразователь координат 10 и сигналы с датчиков углов 26 и 27 ДНГ 6, управляющих разгрузочными датчиками моментов, расположенных по оси ОВ РВК и оси ОС РТ, пропускают через преобразователь координат 10. При идеальном преобразователе координат эти каналы становятся независимыми.
Для нормального функционирования ИНС при любых эволюциях объекта в ее гироплатформе применена дополнительная следящая рама 4, ось вращения которой ОД в исходном положении совпадает с осью ОВ рамы внутреннего крена 2.
При рассмотрении сущности предлагаемого способа используем следующие системы координат (СК):
OгXгYгZг - географическая СК, в которой начало СК находится на поверхности земного эллипсоида, ось ОгХг лежит в плоскости местного меридиана и направлена к северному полюсу, ось OгYг направлена по вертикали к земному эллипсоиду, ось OгZг направлена на восток;
OкXкYкZк - СК связанная с корпусом ИНС, начало координат помещен в центр масс объекта, оси ОкХк и OкYк расположены в вертикальной плоскости симметрии объекта, ось ОкХк направлена вдоль продольной оси объекта, а ось OкYк - по перпендикуляру к оси ОкХк, лежащему в вертикальной плоскости симметрии объекта, ось OкZк образует правую СК;
O1X1Y1Z1 - СК, связанная с СП. Начало СК помещено в центр пересечения осей OA, ОВ, ОС, ОД гироплатформы, ось O1X1 направлена по оси РВК ОВ в направлении продольной оси объекта, ось O1Y1 направлена по оси платформы OA вверх, ось O1Z1 направлена так, чтобы СК была правой;
O2X2Y2Z2 - СК, связанная с РВК. Начало СК помещено в центр пересечения осей OA, ОВ, ОС, ОД гироплатформы, ось О2Х2 направлена по оси РВК ОВ, ось O2Y2 направлена по оси вращения СП OA, ось O2Z2 направлена так, чтобы СК была правой;
O3X3Y3Z3 - СК, связанная с РТ. Начало СК помещено в центр пересечения осей гироплатформы OA, ОВ, ОС, ОД, ось О3Х3 направлена по оси ОВ РВК в направлении продольной оси объекта, ось O3Z3 направлена по оси ОС рамы тангажа в сторону правого борта объекта, ось O3Y3 направлена так, чтобы СК была правой;
O4X4Y4Z4 - СК, связанная с РТ. Начало СК помещено в центр пересечения осей гироплатформы OA, ОВ, ОС, ОД, ось О4Х4 направлена по оси ОД дополнительной рамы в направлении продольной оси объекта, ось O4Z4 направлена по оси ОС рамы тангажа в сторону правого борта объекта, ось О4Y4 направлена так, чтобы СК была правой;
Oг1Xг1Yг1Zг1 - СК, связанная с корпусом ДНГ канала крена и тангажа. Начало СК помещено в центр пересечения осей внутреннего карданового подвеса, оси Oг1Xг1 и Oг1Yг1 расположены в измерительной плоскости ДНГ, при этом ось Oг1Xг1 параллельна оси O1Z1 стабилизированной площадки и направлена в противоположную сторону, ось Orг1Yг1 параллельна оси О1Х1 СП и направлена в противоположную сторону, ось Oг1Zг1 направлена вдоль оси собственного вращения ротора ДНГ и образует правую СК;
Oг2Xг2Yг2Zг2 - СК, связанная с корпусом ДНГ канала курса. Начало СК помещено в центр пересечения осей внутреннего карданового подвеса, оси Ог2Хг2 и Oг2Yг2 расположены в измерительной плоскости ДНГ, при этом ось Ог2Хг2 параллельна оси O1Z1 стабилизированной площадки и направлена в противоположную сторону, ось Oг2Yг2 параллельна оси O1Y1 СП и направлена в противоположную сторону, ось Oг2Zг2 направлена вдоль оси собственного вращения ротора ДНГ и образует правую СК;
Op1Xp1Yp1Zp1 - СК осей Резаля, связанная с ротором ДНГ канала крена и тангажа. Начало СК помещено в центр пересечения осей внутреннего карданового подвеса, ось Op1Xp1 в исходном положении совпадает с измерительной осью Oг1Xг1 ДНГ и направлена в сторону датчика угла 27, ось Op1Yp1 в исходном положении совпадает с измерительной осью Oг1Yг1 ДНГ и направлена в сторону датчика угла 26, ось Op1Zp1 направлена вдоль оси собственного вращения ротора ДНГ и образует правую СК;
Op2Xp2Yp2ZP2 - СК осей Резаля, связанная с ротором ДНГ канала курса. Начало СК помещено в центр пересечения осей внутреннего карданового подвеса, ось Ор2ХР2 в исходном положении совпадает с измерительной осью Ог2Хг2 ДНГ и направлена в сторону датчика угла 20, ось OP2YP2 в исходном положении совпадает с измерительной осью Oг2Yг2 ДНГ и направлена в сторону датчика угла 19, ось Op2ZP2 направлена вдоль оси собственного вращения ротора ДНГ и образует правую СК;
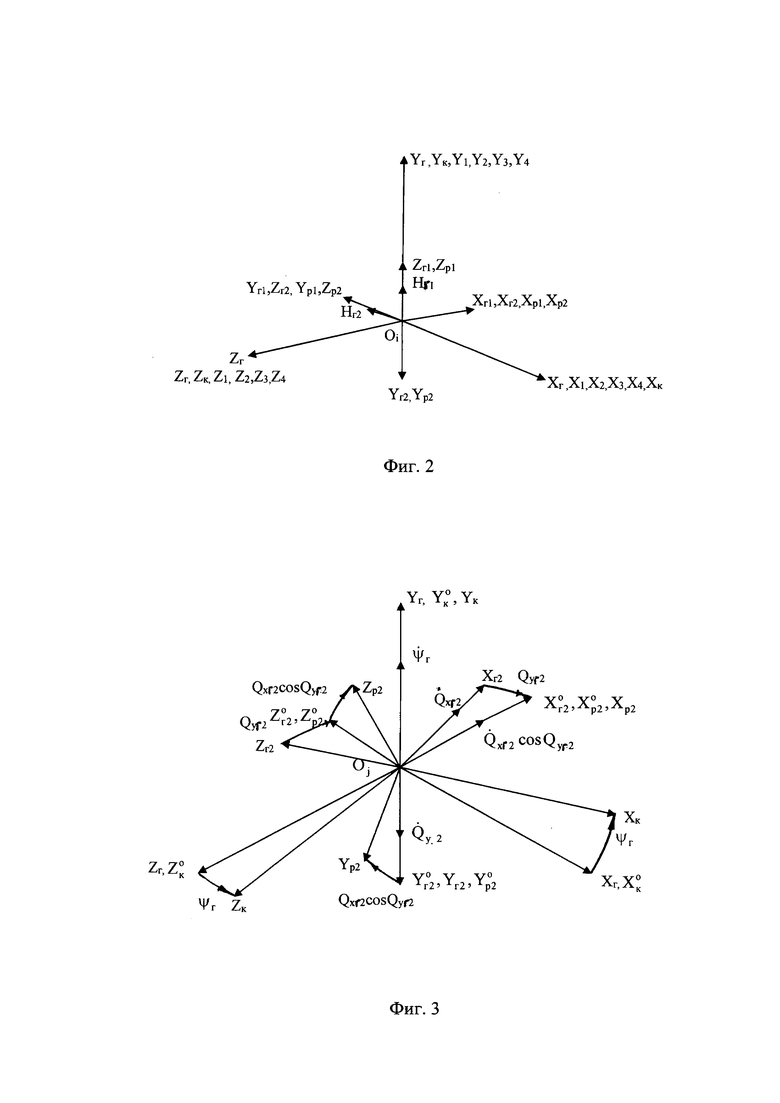
На фиг. 2 показано взаимное исходное расположение СК OгXгYгZг, OkXkYkZk, O1X1Y1Z1, O2X2Y2Z2, O3X3Y3Z3, O4X4Y4Z4, Oг1Xг1Yг1Zг1, Oг2Xг2Yг2Zг2, Op1Xp1Yp1Zp1, Op2Xp2Yp2ZP2 Op2XP2Yp2ZP2 (на фиг. 2 центры СК помещены в одну точку Oi, где i=г, к, 1, 2, 3, 4, г1, г2, p1, р2; Н-вектор кинетического момента ДНГ) до регулировки угловых положений роторов ДНГ. Для обеспечения при регулировке перпендикулярности всех осей карданового подвеса гироплатформы, нулевого значения угла рыскания ψг, измеряемого датчиком угла курсового канала, а также воспроизведения ориентации СП аналогичной ее ориентации при работе на объекте, корпус ИНС располагают на неподвижном относительно Земли горизонтальном основании, а СП гироплатформы выставляют таким образом, чтобы связанная с ней СК O1X1Y1Z1 совпадала с географической СК OгXгYгZг, как показано на фиг. 2. В процессе регулировки географическая ориентация СП сохраняется ИНС.
Задачей регулировок ДНГ в составе ИНС является определение угловой ориентации их вращающихся роторов относительно корпусов, которая обеспечивает уменьшение изменения скоростей дрейфов, обусловленных действием газодинамических моментов. При наклоне ротора относительно корпуса ДНГ изменяются параметры зазоров между поверхностью вращающегося ротора и не вращающимися элементами конструкции, связанными с корпусом. Изменение этих зазоров меняет величины газодинамических моментов, действующих по осям ротора, на определенных углах наклона происходит минимизация газодинамических моментов и как следствие уменьшение изменения во времени скоростей дрейфа ДНГ и погрешностей выработки ИНС параметров ориентации и навигации.
При регулировании ДНГ 5 в курсовой канал стабилизации гироплатформы ИНС, на вход усилителя стабилизации 33 (см. фиг. 1), и в канал электрической пружины этого ДНГ, на вход усилителя 36, подают сигналы уставок соответственно U1 и Uэп. Появившийся на входе усилителя 33 сигнал U1 обусловит работу разгрузочного датчика момента 12 канала курсовой стабилизации. Возникший при этом момент начнет поворачивать СП и соответственно корпус ДНГ 5 вокруг ее оси OA. При этом ротор 23 ДНГ 5 с точность до величины собственной скорости дрейфа, которая несравненно мала относительно скорости поворота СП, будет сохранять в географической СК неизменное положение, которое ему обеспечивает алгоритм работы ИНС. В ДНГ 5, при повороте его корпуса относительно ротора вокруг измерительной оси Oг2Yг2, датчиком угла 19 выработается сигнал Uуг2. Фазировка канала стабилизации такова, что этот сигнал, пройдя через соответствующий усилительный тракт, будет вычитаться из сигнала уставки U1 на входе усилителя стабилизации 33. Нарастание угла отклонения корпуса ДНГ 5 относительно его ротора 23 будет происходить до тех пор, пока согнал с датчика угла не компенсирует сигнал уставки и на входе усилителя 33 будет только нулевой сигнал. При этом угол Qуг2 отклонения ротора 23 вокруг оси измерительной оси Ог2Yг2 будет равен углу ψг1 поворота СП вокруг РВК (см. фиг 3). Величина этого угла составит Qуг2=Куг2U1, где Куг2 масштабный коэффициент курсового канала стабилизации. Из практики известно, что для приемлемого уменьшения изменения во времени газодинамической скорости дрейфа типичного ДНГ требуются наклоны ротора порядка единиц угловых минут, при этом угол до упора ротора равен десяткам угловых минут.
Сигнал уставки Uэп на входе усилителя электрической пружины обусловит появления тока в датчике момента 21 ДНГ 5, который приложит момент, действующий по оси OP2YP2 ротора 23. В результате действия этого момента ротор 23 начнет прецессировать вокруг оси ротора OР2ХР2 до тех пор, пока угол отклонения ротора Qхг2 не достигнет величины, при которой вырабатываемый датчиком угла 20 сигнал Uхг2 не скомпенсирует уставку UЭП. Таким образом ротор 23 отклонится на угол Qхг2, а на входе усилителя электрической пружины вновь образуется нулевой сигнал и в дальнейшем система электрической пружины, следя за этим нулевым сигналом, будет удерживать ротор на этом угле.
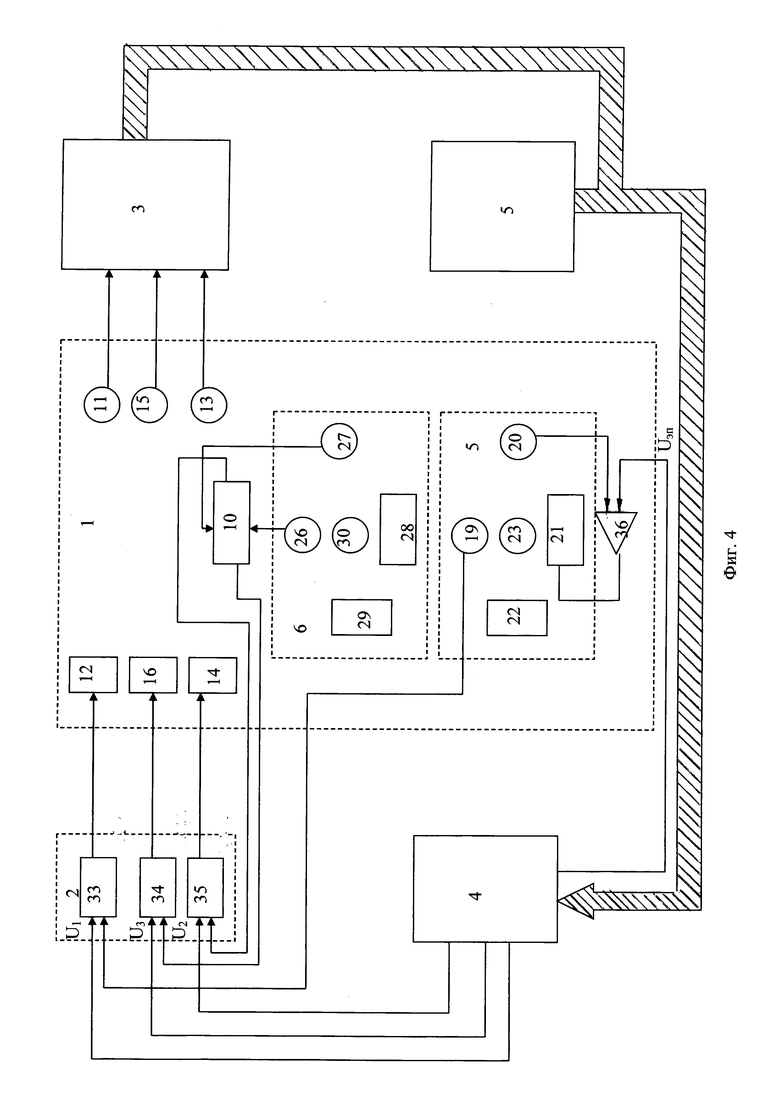
На фиг. 3 показано взаимное расположение СК OгXгYгZг, OкXкYкZк, Oг2Xг2Yг2Zг2, Op2XP2Yp2ZP2 (на фиг. 3 центры СК помещены в одну точку Oj, где j=г, к, г2, р2) после регулировки углового положения роторов курсового ДНГ.
Таким образом, поданные сигналы уставок в курсовой канал стабилизации и канал электрической пружины, вызвали отклонения его ротора относительно корпуса по двум его измерительным осям и поворот СП по курсу на угол ψг=Qyp2.
При регулировании каналов стабилизации по крену и тангажу на вход усилителей стабилизации 35 и 34 (см. фиг. 1) подают сигналы уставок U2 и U3. В результате действия сигнала U2 разгрузочный двигатель 14 начнет поворачивать РВК, СП и соответственно ДНГ 6 вокруг оси ОВ. Одновременно с этим сигнал уставки U3 обусловит работу разгрузочного двигателя 16, поворот СП, корпуса ДНГ 6 вокруг оси ОС. При этом ротор 30 ДНГ 6 будет сохранять в географической СК неизменное положение. В ДНГ 6 вследствие поворота его корпуса относительно ротора 30 вокруг измерительных осей ОХг1 и OYг1 датчиками углов 27, 26 вырабатываются сигналы Uхг1, Uуг1. Фазировка каналов стабилизации по крену и тангажу такова, что сигналы Uхг1, Uуг1, пройдя через усилительные тракты, будут вычитаться из сигналов уставок U2, U3 на входах усилителей стабилизации соответственно 35 и 34. Нарастание углов отклонения корпуса ДНГ 6 относительно его ротора 30 будет происходить до тех пор, пока сигналы с датчиков углов 27 и 26 не скомпенсируют сигналы уставок U2, U3, и на входах усилителей 35 и 36 не образуются рабочие нулевые сигналы.
При проведении режима начальной выставки ИНС, перед режимом навигации, устраняются наклоны СП по крену и тангажу и измерительные оси ДНГ 6 при этом устанавливаются в горизонтальную плоскость, а его ротор 30 будет иметь наклон относительно корпуса, характеризуемый углами Qхг1 и Qуг1. В процессе начальной выставки вектор кинетического момента ДНГ 6 будет приведен в плоскость меридиана, а его измерительная ось OYг1 будет направлена по вертикали.
Использование предлагаемого способа в ИНС на маневренном объекте потребует определение рабочих сигналов уставок U2P и U3р, подаваемых на вход усилителей каналов стабилизации крена и тангажа, зависящих от курса объекта. Применение следящей системы дополнительной рамы, включающей датчик угла крена 13, усилитель 37 и датчик момента 18, позволяет удерживать угол ϕг поворота РВК равным нулю при маневрах объекта. При этом внутренние оси карданового подвеса СП сохраняют ортогональность, что позволяет раскладывать сигналы ДНГ 6 в функции угла поворота ψг только по курсовой оси OA. В результате проведенной регулировки углы наклона ротора ДНГ 6 по осям чувствительности OXг1 и OYг1, имеют величины Q0хг1 и Q0уг1. Эти угловые величины должны быть постоянными при произвольных углах рыскания ψг объекта для того, чтобы сохранить достигнутые в процессе регулировки минимальные изменения во времени скоростей дрейфа ДНГ 6 и соответственно параметров ориентации и навигации ИНС. Углам наклона ротора ДНГ 6 Q0хг1 и Q0уг1 на входе усилителей стабилизации 35 и 34 при ψг=0 соответствуют сигналы уставок U20 и U30, которые компенсируются сигналами Uхг10 и Uуг10 c датчиков углов 27 и 26 ДНГ 6. При повороте объекта на угол \|/г величины этих сигналов с датчиков углов 27 и 26 должны быть сохранены, чтобы остались прежними углы наклона ротора Q0хг1 и Q0уг1, но при этом, пройдя через преобразователь координат 10, они обусловят на входах усилителей стабилизации 35 и 34 соответственно рабочие сигналы отдатчиков углов
U2ду=Uхг10Cosψг-Uуг10Sinψг,
U3ду=Uхг10Sinψг+Uуг10Cosψг.
Для обеспечения сохранности углов наклона Q0хг1 и Q0уг1 ДНГ 6 при повороте объекта на угол ψг эти сигналы сдатчиков углов должны быть скомпенсированы следующими рабочими сигналами уставок
U2=-Uхг10Cosψг+Uуг10Sinψг,
U3=-Uхг10Sinψг-Uуг10Cosψг.
Учитывая, что Uхг10=-U20, Uуг10=-U30, рабочие сигнала уставок будут иметь вид
U2=Uхг10Cosψг-Uуг10Sinψг,
U3=Uхг10Sinψг+Uуг10Cosψг.
Таким образом, предлагаемый способ регулировки динамически настраиваемых гироскопов в составе инерциальной навигационной системы имеет следующие отличия от известного способа:
- вводится новое действие, связанное с наклоном роторов ДНГ, работающих в составе ИНС;
- вводится новое действие, связанное с реализацией наклонов роторов ДНГ путем подачи сигналов уставок на вход усилителей каналов стабилизации гироплатформы ИНС и на вход усилителя электрической пружины избыточного канала курсового ДНГ;
- вводится новое действие, связанное с определением рабочих сигналов уставок, подаваемых в каналы стабилизации гироплатформы ИНС, на основе измерения ее параметров ориентации и навигации при разных углах наклона роторов ДНГ
- представлена новая формульная зависимость для рабочих сигналов уставок, подаваемых на входы усилителей стабилизации каналов крена и тангажа, являющаяся функциональной зависимостью от угла рыскания, для четырехосной гироплатформы с дополнительной рамой;
- предложено новое качество, связанное с уменьшением погрешностей ИНС, вызванных газодинамической скоростью дрейфа ДНГ, путем ее регулирования в составе ИНС без снятия и замены ДНГ в гироплатформе.
На фиг. 1 представлена кинематическая схема гироплатформы с четырехосным кардановым подвесом инерциальной навигационной системы на динамически настраиваемых гироскопах.
На фиг. 2 показано взаимное расположение систем координат OrXrYrZr, OкXкYкZк, O1X1Y1Z1, O2X2Y2Z2, O3X3Y3Z3, O4X4Y4Z4, Oг1Xг1Yг1Zг1 Oг2Xг2Yг2Zг2, Op1Xp1Yp1Zp1, Op2Xp2Yp2Zp2 до регулировки угловых положений роторов ДНГ.
На фиг. 3 показано взаимное расположение систем координат OгXгYгZг, OкXкYкZк, Oг2Xг2Yr2Zг2, Op2Xp2Yp2Zp2 после регулировки углового положения курсового ДНГ.
На фиг. 4 представлена блок-схема регулирования угловых положений роторов ДНГ в составе инерциальной навигационной системы.
Регулировка угловых положений роторов ДНГ в ИНС может быть реализована с использованием ее стандартных блоков.
На фиг. 4 представлена блок-схема регулирования угловых положений роторов ДНГ в составе инерциальной навигационной системе, которая включает: гироплатформу 1; блок усилителей 2; преобразователь аналог-код 3; преобразователь код-напряжение 4; вычислитель 5.
В состав гироплатформы 1 входят (элементы гироплатформы имеют обозначения как на фиг. 1): курсовой ДНГ 5; ДНГ каналов крена и тангажа 6; преобразователь координат 10; датчик момента 12 стабилизированной площадки; датчик момента 14 рамы внутреннего крена; датчик момента 16 рамы тангажа; датчик угла поворота 11 стабилизированной площадки; датчик угла поворота 13 рамы внутреннего крена; датчик угла поворота 15 рамы тангажа; усилитель 36 электрической пружины курсового гироскопа.
Курсовой ДНГ 5 имеет по оси чувствительности OYг2 датчик угла 19 и датчик момента 21; по оси чувствительности ОХг2 - датчик угла 20 и датчик момента 22. Датчики угла 19 и 20 измеряют углы поворота ротора 20 относительно осей OYг2 и ОХг2, а датчики моментов 21,22 прикладывают моменты к ротору по этим осям. ДНГ 6 каналов крена и тангажа имеет по оси чувствительности OXг1 датчик угла 27 и датчик момента 29, по оси чувствительности OYг1 датчик угла 26 и датчик момента 28. Датчики угла 27, 26 измеряют углы поворота ротора 30.
Блок усилителей (БУ) 2 предназначен для усиления по мощности и преобразования аналогового напряжения в пропорциональный ток для датчиков момента стабилизации; содержит усилитель стабилизации 33 стабилизированной площадки; усилитель стабилизации 35 рамы внутреннего крена.
Преобразователь аналог-код (ПАК) 3 преобразует сигналы с выходов датчиков углов стабилизированной площадки, рамы внутреннего крена, рамы тангажа в параллельный двоичный код.
Преобразователь код-напряжение (ПКН) 4 преобразует кодовую информацию, получаемую из вычислителя 5, в сигналы пропорциональные углам, поступающих в БУ в качестве заданных углов.
Вычислитель 5, кроме решения основных задач выставки, навигации, компенсации инструментальных погрешностей, формирует разовые сигналы управления для всех блоков системы.
При реализации предлагаемого способа с помощью блок-схемы, представленной на фиг. 4, в вычислителе 55 формируют в цифровом виде сигналы уставок, которые поступают в ПКН 4, в котором преобразуют кодовую информацию в сигналы уставок U1, UЭП, U2, U3, пропорциональные углам отклонения роторов ДНГ и поступающие в БУ 2, а затем на датчики моментов 12, 16, 14 каналов стабилизации и в усилитель электрической пружины 36 курсового ДНГ. Датчики моментов каналов стабилизации будут производить наклон СП и поворот ее по курсу до тех пор, пока сигналы, поступающие с датчиков углов ДНГ, не скомпенсируют сигналы уставок и на входе усилителей 33, 34, 35 не установятся нулевые сигналы. Аналогичный процесс будет иметь место и в канале электрической пружины курсового ДНГ. Получившиеся углы наклона СП относительно горизонта и такие же углы наклона роторов относительно их корпусов измеряются датчиками углов гироплатформы 11, 13, 15, затем преобразуются ПАК 3 в двоичный код и направляются в вычислитель, в котором производится определение углов наклона роторов. В результате регулировки определяются значения сигналов уставок U10, иэп0, U20, U30, которые минимизируют погрешности ИНС, вызванные газодинамической скоростью дрейфа ДНГ. Эти сигналы будут запомнены в вычислителе и использованы в рабочих режимах ИНС. В стандартном режиме начальной выставки ИНС приводятся в плоскость горизонта и меридиана измерительные оси ДНГ, а их ротора при этом будут иметь наклоны относительно измерительных плоскостей, что позволит в рабочих режимах навигации обеспечит уменьшение скоростей дрейфов ДНГ, вызванных изменениями во времени их газодинамических моментов, и обусловленных ими погрешностей выработки ИНС параметров ориентации и навигации.
Использование предлагаемого способа позволит повысить технические характеристики ИНС на ДНГ, в частности, уменьшить ее погрешности, вызванные газодинамической скоростью дрейфа ДНГ, а также снизить стоимость ремонта ИНС, обусловленного возникновением при эксплуатации газодинамической скорости дрейфа, превышающей требуемый допуск, за счет возможности его уменьшения предлагаемым способом без снятия отказавшего ДНГ с гироплатформы и его замены.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения параметров ориентации объекта при помощи полуаналитической инерциальной навигационной системы с географической ориентацией осей четырехосной гироплатформы | 2022 |
|
RU2782334C1 |
| ГИРОСКОПИЧЕСКАЯ НАВИГАЦИОННАЯ СИСТЕМА | 2000 |
|
RU2169903C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ УГЛОВОЙ ОРИЕНТАЦИИ НАЗЕМНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2019 |
|
RU2723976C1 |
| СПОСОБ ОЦЕНИВАНИЯ ОШИБОК ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ И ЕЁ КОРРЕКЦИИ ПО ИЗМЕРЕНИЯМ СПУТНИКОВОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2015 |
|
RU2617565C1 |
| СПОСОБ ПОСТРОЕНИЯ АСТРОИНЕРЦИАЛЬНОЙ НАВИГАЦИОННОЙ СИСТЕМЫ | 2016 |
|
RU2641515C2 |
| СИСТЕМА КУРСОКРЕНОУКАЗАНИЯ | 2000 |
|
RU2171450C1 |
| СПОСОБ ОЦЕНИВАНИЯ ОШИБОК ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ И ЕЁ КОРРЕКЦИИ ПО ИЗМЕРЕНИЯМ ДОПЛЕРОВСКОГО ИЗМЕРИТЕЛЯ СКОРОСТИ | 2015 |
|
RU2614192C1 |
| СПОСОБ ГИРОКОМПАСИРОВАНИЯ С ПРИМЕНЕНИЕМ ГИРОСКОПИЧЕСКОГО ДАТЧИКА УГЛОВОЙ СКОРОСТИ, УСТАНОВЛЕННОГО НА УПРАВЛЯЕМУЮ В АЗИМУТЕ И СТАБИЛИЗИРОВАННУЮ В ПЛОСКОСТИ МЕСТНОГО ГОРИЗОНТА ПЛАТФОРМУ | 2002 |
|
RU2210740C1 |
| ИНЕРЦИАЛЬНАЯ СИСТЕМА | 2006 |
|
RU2326349C2 |
| НАЗЕМНАЯ ГИРОСКОПИЧЕСКАЯ СИСТЕМА (ВАРИАНТЫ) | 2002 |
|
RU2213937C1 |
Изобретение относится к области приборостроения и может быть использовано для регулирования изменяющейся во времени угловой скорости динамически настраиваемых гироскопов в составе инерциальной навигационной системы и погрешностей выработки ею параметров ориентации и навигации, обусловленных этой скоростью дрейфа. Для регулирования изменяющейся во времени угловой скорости дрейфа динамически настраиваемых гироскопов в составе инерциальной навигационной системы и погрешностей выработки ею параметров ориентации и навигации, обусловленных этой скоростью дрейфа, инерциальную навигационную систему предварительно устанавливают на горизонтальное неподвижное относительно Земли основание, производят ее запуск, выставку гироплатформы в плоскость горизонта и в плоскость меридиана. Далее удерживают в этом пространственном положении стабилизированную площадку с динамически настраиваемыми гироскопами, подают на вход усилителя канала курсовой стабилизации гироплатформы, на вход усилителя электрической пружины этого канала, а также на входы усилителей стабилизации каналов крена и тангажа сигналы уставок. Затем измеряют изменения во времени параметров ориентации и навигации, вырабатываемые инерциальной навигационной системой. Выполняют другие запуски с другими уставками, по результатам которых находят сигналы уставок, минимизирующие погрешности выработки инерциальной навигационной системой параметров ориентации и навигации, а в рабочих режимах подают сформированные в вычислителе на основе этих минимизирующих уставок сигналы в каналы стабилизации гироплатформы и в канал электрической пружины курсового гироскопа. Техническим результатом является обеспечение возможности регулировки динамически настраиваемых гироскопов в составе инерциальной навигационной системы, позволяющей уменьшить монотонное изменение газодинамической скорости дрейфа динамически настраиваемых гироскопов и обусловленных ею погрешностей выработки инерциальной навигационной системы параметров ориентации и навигации без замены гироскопа в системе. 4 ил.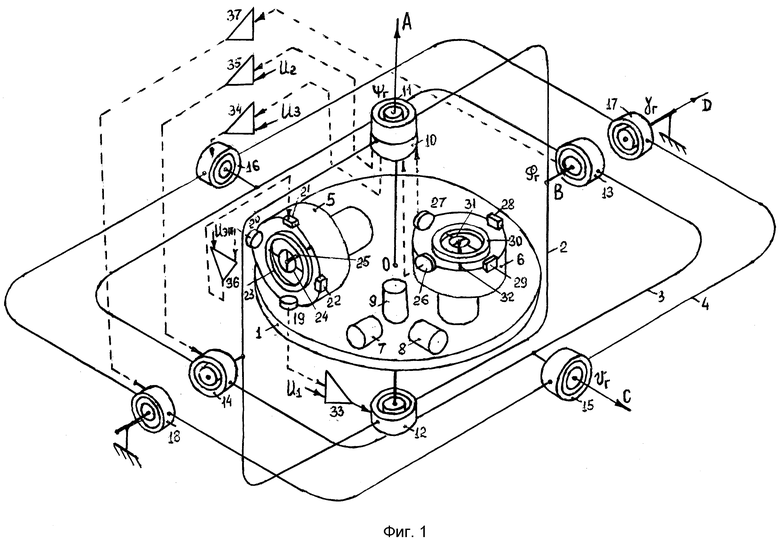
Способ регулировки динамически настраиваемого гироскопа в составе инерциальной навигационной системы, включающий изменение взаимного углового положения элементов корпуса гироскопа и его ротора, отличающийся тем, что предварительно устанавливают инерциальную навигационную систему на динамически настраиваемых гироскопах, имеющую термостатируемую, управляемую в азимуте и стабилизированную в плоскости горизонта гироплатформу с четырехосным кардановым подвесом, включающим дополнительную следящую раму, на горизонтальное неподвижное относительно Земли основание таким образом, чтобы ось дополнительной рамы, направляемая на объекте в сторону движения, была ориентирована на Север, запускают инерциальную навигационную систему, с включением системы термостатирования, производят выставку стабилизированной площадки гироплатфомы в плоскость горизонта и по направлению на Север, когда ее датчики углов рыскания, крена, тангажа показывают нулевые значения, далее удерживают в этом пространственном положении стабилизированную площадку, подают с помощью вычислителя инерциальной навигационной системы на вход усилителя канала курсовой стабилизации гироплатформы и на вход усилителя электрической пружины гироскопа этого канала сигналы уставок соответственно U1, UЭП, а на вход усилителей стабилизации каналов крена и тангажа гироплатформы сигналы уставок соответственно U2, U3, и с момента готовности инерциальной навигационной системы измеряют в течение одного часа изменения во времени параметров ориентации и навигации, вырабатываемых инерциальной навигационной системой, аналогично выполняют другие запуски с измерениями параметров ориентации и навигации при одинаковых температурах окружающей среды и начальных тепловых состояниях инерциальной навигационной системы, но при других значениях сигналов уставок, находят сигналы уставок U10, UЭП0, U20, U30, минимизирующие погрешности выработки инерциальной навигационной системой параметров ориентации и навигации при запуске, а в рабочих режимах инерциальной навигационной системы подают, сформированные в вычислителе, сигналы уставок:
U1P=U10 в канал курсовой стабилизации;
Uэпр=UЭП0 в канал электрической пружины гироскопа курсового канала;
U2P=U20Cosψг+U30Sinψг в канал стабилизации по крену;
U3Р=U30Cosψг-U20Sinψг в канал стабилизации по тангажу,
где ψг - угол поворота рамы внутреннего крена относительно стабилизированной площадки, который измеряют с помощью датчика угла гироплатформы этого поворота.
| СПОСОБ РЕГУЛИРОВКИ ДИНАМИЧЕСКИ НАСТРАИВАЕМОГО ГИРОСКОПА | 2007 |
|
RU2344375C2 |
| СПОСОБ РЕГУЛИРОВКИ ДИНАМИЧЕСКИ НАСТРАИВАЕМОГО ГИРОСКОПА | 1989 |
|
SU1598615A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ И КОМПЕНСАЦИИ УХОДА ГИРОСТАБИЛИЗИРОВАННОЙ ПЛАТФОРМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2005 |
|
RU2285902C1 |
| US 8311757 B2, 13.11.2012. | |||

