Предлагаемый способ наведения управляемой ракеты и система наведения для его реализации относятся к области разработки систем управления ракетами и могут быть использованы в противотанковых ракетных комплексах (ПТРК).
Наиболее близким к предлагаемому является способ наведения противотанковой ракеты, реализованный в ПТРК 9К114 «Конкурс» и взятый в качестве прототипа [1], включающий запуск противотанковой ракеты с бортовым источником излучения, прохождение светового потока от источника излучения через объектив и оптический растр, модуляцию светового потока с помощью оптического растра, прием модулированного светового потока от источника излучения фотоприемником со сплошной фоточувствительной поверхностью, выделение координат бортового источника излучения, определение координат противотанковой ракеты и формирование команд управления противотанковой ракетой.
Наиболее близкой к предлагаемой является система наведения противотанковой ракеты, применяемая в ПТРК 9К114 «Конкурс» [1]. Эта система наведения противотанковой ракеты была принята за прототип предлагаемого изобретения. Данная система наведения содержит последовательно соединенные объектив, принимающий сигнал от бортового источника излучения, оптический растр, фотоприемник излучения со сплошной чувствительной поверхностью, усилитель фототока, блок выделения координат и блок формирования команд, а также генератор опорных напряжений, подключенный к оптическому растру и блоку выделения координат.
Функциональная схема системы наведения противотанковой ракеты приведена на фиг.1.
Система наведения противотанковой ракеты работает следующим образом. Входным воздействием для системы наведения ракеты является угловое отклонение противотанковой ракеты от линии прицеливания. Световой поток источника излучения проходит через объектив (1) и оптический растр (2), который имеет прозрачные и непрозрачные сектора, расположенные радиально, и совершает плоскопараллельное перемещение (сканирование), что обеспечивает частотную модуляцию и пространственную селекцию светового потока бортового источника излучения. Величина частоты модуляции светового потока определяется положением источника излучения относительно линии визирования в полуплоскостях объектива. Частотно-модулированный световой поток воспринимается фотоприемником со сплошной фоточувствительной поверхностью (3) и преобразуется в соответствующие электрические сигналы. Частотно-модулированный сигнал с фотоприемника поступает в усилитель фототока (4), где усиливается до необходимого значения. Выходной сигнал с усилителя фототока содержит информацию об угловых отклонениях противотанковой ракеты от линии прицеливания, которая поступает в блок обработки (5) и далее - в блок выделения координат (6). Блок выделения координат вырабатывает напряжения, соответствующие линейным отклонениям противотанковой ракеты от линии прицеливания. В качестве опорных напряжений при фазовом детектировании используются сигналы с генератора опорных напряжений (8). Напряжения, пропорциональные отклонению противотанковой ракеты от линии прицеливания по курсу и тангажу, с выхода блока выделения координат поступают на блок формирования команд (7), где преобразуются в сигналы управления, предназначенные для передачи по проводной линии связи на противотанковую ракету.
Современные условия применения противотанковых ракет потребовали создать такой способ наведения управляемой ракеты и систему наведения для его реализации, которые позволили бы преодолеть ряд технических трудностей. Например, оптический растр в системе наведения противотанковой ракеты представляет собой сложную оптико-механическую систему. К этой системе предъявляются как высокие технологические требования при сборке (установке и юстировке растров), так и высокие требования по техническим характеристикам в процессе функционирования (например, высокая стабилизация частоты опорного напряжения). Следует принимать во внимание, что точность измерения координат источника излучения определяется опорными частотами. Так как опорные частоты в процессе эксплуатации оптического прицела подвержены изменениям, то точность определения координат источника излучения может изменяться. Кроме того, точность выделения координат источника излучения определяется его положением относительно линии визирования в полуплоскостях объектива в соответствии с частотой модуляции излучения. Сам фотоприемник со сплошной чувствительной поверхностью вносит высокие шумовые составляющие в результирующий сигнал на его выходе (особенно при высоких температурах эксплуатации), что существенно уменьшает соотношение сигнал/шум в системе управления.
Задачей предлагаемого изобретения является разработка такого способа наведения управляемой ракеты и системы наведения для его реализации, которые позволили бы повысить качество и надежность процесса наведения управляемой ракеты без изменения конструкции самой ракеты, осуществлять селекцию источника полезного сигнала по интенсивности излучения, существенно упростить конструкцию аппаратуры управления, повысить соотношение сигнал/шум, и, как следствие, повысить помехозащищенность всей системы управления.
Поставленная задача решается тем, что в способе наведения управляемой ракеты, включающем запуск управляемой ракеты с бортовым источником излучения, прием светового потока от бортового источника излучения управляемой ракеты фотоприемником, выделение координат бортового источника излучения управляемой ракеты, определение координат управляемой ракеты и формирование команд управления, фокусировку светового потока от бортового источника излучения управляемой ракеты осуществляют на фотоприемнике матричного типа, а в процессе выделения координат бортового источника излучения управляемой ракеты формируют видеокадры фоноцелевой обстановки вместе с бортовым источником излучения, определяют засвеченное бортовым источником излучения пространство, определяют центр засвеченного бортовым источником излучения пространства, определяют ячейку фотоприемника матричного типа, являющуюся центром засвеченного бортовым источником излучения пространства, и определяют расположение ячейки фотоприемника матричного типа, являющейся центром засвеченного бортовым источником излучения пространства, относительно центральной ячейки фотоприемника матричного типа.
Поставленная задача решается также тем, что в систему наведения управляемой ракеты, содержащую объектив, фотоприемник, последовательно соединенные блок выделения координат и блок формирования команд, дополнительно введены последовательно соединенные блок выделения засвеченного пространства и блок расчета центра засвеченного пространства, при этом фотоприемник выполнен в виде фотоприемника матричного типа, установлен в фокальной плоскости объектива, причем выход фотоприемника матричного типа соединен с блоком выделения засвеченного пространства, а выход блока расчета центра засвеченного пространства соединен с блоком выделения координат.
В предлагаемом способе наведения управляемой ракеты центр засвеченного пространства источником излучения может вычисляться как его геометрический центр.
В предлагаемом способе наведения управляемой ракеты центр засвеченного пространства источником излучения может вычисляться как его энергетический центр.
Сущность способа заключается в следующем. Излучение фоноцелевой обстановки совместно с излучением бортового источника излучения управляемой ракеты попадает на входной зрачок объектива и фокусируется на чувствительных ячейках фотоприемника матричного типа, который формирует последовательность видеокадров с изображением фоноцелевой обстановки и бортового источника излучения управляемой ракеты. Во время формирования кадра видеоизображения с каждой чувствительной ячейки фотоприемника матричного типа снимается сигнал, пропорциональный энергии падающего на него излучения. Так как уровень сигнала от бортового источника излучения управляемой ракеты известен и превосходит сигнал фона, на фотоприемнике матричного типа образуется изображение бортового источника излучения с ожидаемым уровнем сигнала с чувствительных ячеек. При опросе пространства фотоприемника матричного типа, засвеченного бортовым источником излучения, определяется центр засвеченного пространства, определяется номер чувствительной ячейки, являющейся центром засвеченного пространства бортовым источником излучения, а далее определяется расположение центральной ячейки засвеченного пространства относительно центральной ячейки фотоприемника матричного типа. После этого осуществляется расчет координат управляемой ракеты и формируются команды управления.
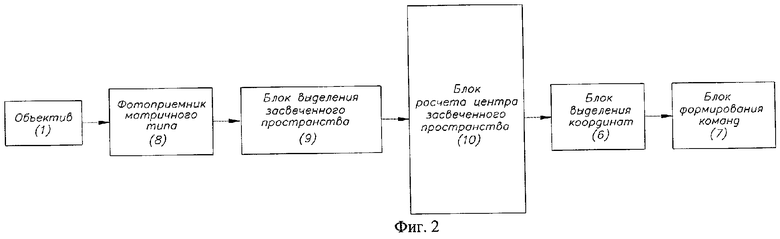
Функциональная схема системы наведения управляемой ракеты приведена на фиг.2.
Система наведения управляемой ракеты работает следующим образом. Входным воздействием для нее является угловое отклонение ракеты относительно линии визирования цели. Источник излучения обеспечивает наличие непрерывного потока излучения в течение всего полетного времени управляемой ракеты. Объектив (1) фокусирует изображение источника излучения непосредственно на фотоприемнике матричного типа (8), который установлен в фокальной плоскости объектива, причем его центральная чувствительная ячейка находится на оптической оси объектива. Световой поток от источника излучения обеспечивает засветку определенной области фотоприемника матричного типа. Определение местоположения данной области возложено на блок выделения засвеченного пространства (9), который не только определяет размеры области засветки фотоприемника источником излучения, но и дает информацию о количестве и координатах засвеченных чувствительных ячеек, а также об их уровнях сигналов. Данная информация поступает в блок расчета центра засвеченного пространства (10), который обеспечивает обработку сигналов непосредственно с тех чувствительных ячеек, которые были засвечены источником излучения. Выходной сигнал с блока расчета центра засвеченного пространства содержит информацию о линейных отклонениях источника излучения относительно линии прицеливания, которая поступает в блок выделения координат (6). После преобразования блок выделения координат вырабатывает сигналы, соответствующие линейным отклонениям управляемой ракеты от линии прицеливания. Напряжения, пропорциональные отклонению управляемой ракеты от линии прицеливания по курсу и тангажу, с выхода блока выделения координат поступают на блок формирования команд (7), где преобразуются в сигналы управления ракетой, предназначенные для передачи по линии связи на управляемую ракету.
В предлагаемом устройстве наведения управляемой ракеты объектив, блок выделения координат, блок формирования команд могут быть выполнены как в прототипе. Фотоприемник матричного типа может быть выполнен на основе высокочастотной ПЗС-матрицы [2]. Блок выделения засвеченного пространства и блок расчета центра засвеченного пространства могут быть выполнены на основе сигнальных микропроцессоров [3] и программируемых логических интегральных схем [4].
Обосновать работу системы наведения можно следующим образом.
Блок выделения засвеченного пространства определяет область засветки. Критерием оценки является соотношение:

где Uij - входной сигнал с ячейки фотоприемника матричного типа, i - номер строки, j - номер столбца;
Uоп - опорный сигнал, определяющий допустимую величину уровня восприятия сигнала фотоприемником матричного типа, обусловленный энергетикой бортового источника излучения управляемой ракеты;
Ue - уровень сигнала, определяемый внутренними шумами и дискретностью фотоприемника матричного типа.
В блоке выделения засвеченного пространства определяют количество N, координаты nyi, nzi ячеек фотоприемника матричного типа, попавших в область засветки, а также их уровни выходных сигналов si.
В блоке расчета центра засвеченного пространства осуществляется определение координат геометрического центра засвеченного пространства, также определяется центральная ячейка засвеченного бортовым источником излучения пространства и ее смещение относительно центральной ячейки фотоприемника матричного типа:
где MY, МZ - максимальное количество ячеек по вертикали и горизонтали в фотоприемнике матричного типа.
В блоке расчета центра засвеченного пространства может также осуществляться определение координат энергетического центра засвеченного пространства, определение центральной ячейки засвеченного бортовым источником излучения пространства с учетом уровней выходных сигналов, а также определение смещения этой ячейки относительно центральной ячейки фотоприемника матричного типа:
Использование зависимостей (4), (5) целесообразно, как правило, на начальном участке управления, когда область засвеченного пространства от бортового источника излучения имеет значительные размеры.
Линейные координаты бортового источника излучения относительно линии визирования определяются из (2), (3) или, соответственно, из (4), (5):
где D - дальность до бортового источника излучения;
f' - фокусное расстояние объектива;
δf - размер ячейки фотоприемника матричного типа.
Точность вычисления линейных координат центра бортового источника излучения определяется следующим выражением:
Анализ формул (1)-(8) показывает, что в рассматриваемой системе точность определения координат бортового источника излучения не зависит от положения ракеты в полуплоскостях объектива, а определяется размерами ячейки фотоприемника матричного типа δf. Кроме того, уровень внутренних шумов фотоприемника матричного типа достаточно малая величина.
Таким образом, предлагаемые способ наведения управляемой ракеты и система наведения для его реализации обеспечивают:
- повышение надежности конструкции аппаратуры наведения за счет исключения растровой системы;
- повышение соотношения сигнал/шум в системе наведения управляемой ракеты за счет применения фотоприемника матричного типа;
- повышение точности наведения управляемой ракеты без изменения конструкции самой ракеты за счет повышения точности выделения координат бортового источника излучения управляемой ракеты.
Следовательно, использование новых элементов, соединенных в соответствии с фиг.2 в предлагаемой системе наведения управляемой ракеты, выгодно отличает ее от прототипа.
Источники информации
1. Пусковая установка 9П135. Техническое описание и инструкция по эксплуатации, М.: Военное издательство, 1974 г. - прототип.
2. Приборы с зарядовой связью/ Под ред. М.Хоувза и Д.Моргана: Пер. с англ. - М.: Энергоиздат, 1981. - 376 с., ил.
3. Руководство пользователя по сигнальным микропроцессорам ADSP-2100/ Пер. с англ. О.В.Луневой; Под ред. А.Д.Викторова; Санкт-Петербургский государственный электротехнический университет. - Санкт-Петербург, 1997. - 520 с.
4. В.Б.Стешенко. ПЛИС фирмы «ALTERA»: Проектирование устройств обработки сигналов. / М.: «Додека», 2000 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2539728C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2406055C2 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2290593C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2282127C2 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2282128C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2290592C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2277690C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2277689C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2277688C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2260161C1 |
Группа изобретений относится к области разработки систем управления ракетами и может быть использована в противотанковых ракетных комплексах (ПТРК). Технический результат - повышение качества и надежности процесса наведения управляемой ракеты без изменения конструкции самой ракеты, осуществление селекции источника полезного сигнала по интенсивности излучения, повышение помехозащищенности всей системы управления. Поставленная задача решается тем, что в способе наведения управляемой ракеты, включающем запуск управляемой ракеты с бортовым источником излучения, прием светового потока от бортового источника излучения управляемой ракеты фотоприемником, выделение координат бортового источника излучения управляемой ракеты, определение координат управляемой ракеты и формирование команд управления, фокусировку светового потока от бортового источника излучения управляемой ракеты осуществляют на фотоприемнике матричного типа. В процессе выделения координат бортового источника излучения управляемой ракеты формируют видеокадры фоноцелевой обстановки вместе с бортовым источником излучения. Определяют засвеченное бортовым источником излучения пространство, определяют центр засвеченного бортовым источником излучения пространства, определяют ячейку фотоприемника матричного типа, являющуюся центром засвеченного бортовым источником излучения пространства, и определяют расположение ячейки фотоприемника матричного типа, являющейся центром засвеченного бортовым источником излучения пространства, относительно центральной ячейки фотоприемника матричного типа. Поставленная задача решается также тем, что в систему наведения управляемой ракеты, содержащую объектив, фотоприемник, последовательно соединенные блок выделения координат и блок формирования команд, дополнительно введены последовательно соединенные блок выделения засвеченного пространства и блок расчета центра засвеченного пространства. При этом фотоприемник выполнен в виде фотоприемника матричного типа, установлен в фокальной плоскости объектива, причем выход фотоприемника матричного типа соединен с блоком выделения засвеченного пространства, а выход блока расчета центра засвеченного пространства соединен с блоком выделения координат. В предлагаемом способе наведения управляемой ракеты центр засвеченного пространства источником излучения может вычисляться как его геометрический центр. В предлагаемом способе наведения управляемой ракеты центр засвеченного пространства источником излучения может вычисляться как его энергетический центр. 2 н. и 2 з.п. ф-лы, 2 ил.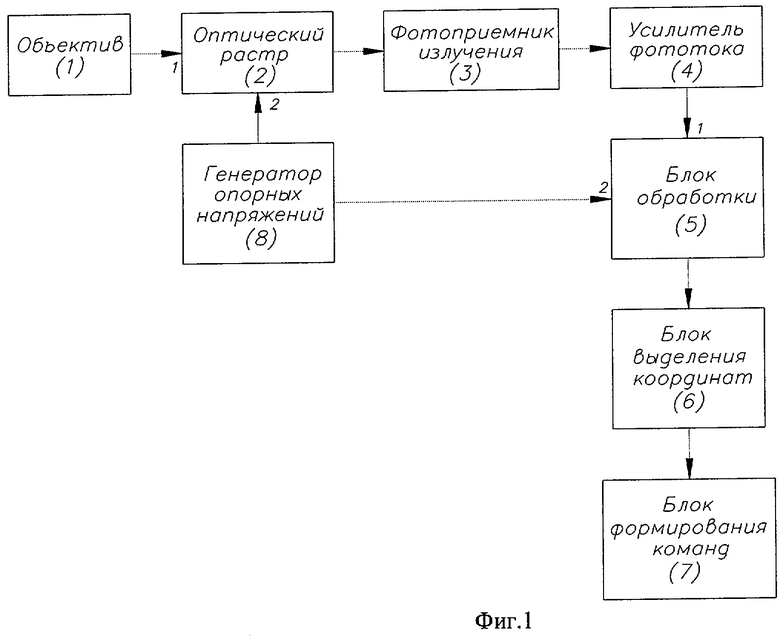
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| DE 4137843 A1, 19.05.1993 | |||
| СПОСОБ ФОРМИРОВАНИЯ КОМАНД УПРАВЛЕНИЯ ВРАЩАЮЩЕЙСЯ РАКЕТОЙ, НАВОДЯЩЕЙСЯ ПО ЛУЧУ | 1994 |
|
RU2107879C1 |
| US 5350134 A, 27.09.1994 | |||
| СПОСОБ ОБРАБОТКИ ПРИЗАБОЙНОЙ ЗОНЫ СКВАЖИНЫ | 1998 |
|
RU2135761C1 |

