Предлагаемый способ наведения управляемой ракеты и система наведения для его реализации относятся к области разработки систем управления ракетами и могут быть использованы в противотанковых ракетных комплексах (ПТРК).
Наиболее близким к предлагаемому является способ наведения противотанковой ракеты, реализованный в ПТРК 9К114 "Конкурс" и взятый в качестве прототипа [1, Пусковая установка 9П135. Техническое описание и инструкция по эксплуатации, М. Военное издательство, 1974 г., стр.11-14], включающий запуск противотанковой ракеты с бортовым источником излучения, прохождение светового потока от источника излучения через объектив и оптический растр, модуляцию светового потока с помощью оптического растра, прием модулированного светового потока от источника излучения фотоприемником со сплошной фоточувствительной поверхностью, выделение координат бортового источника излучения, определение координат противотанковой ракеты и формирование команд управления противотанковой ракетой.
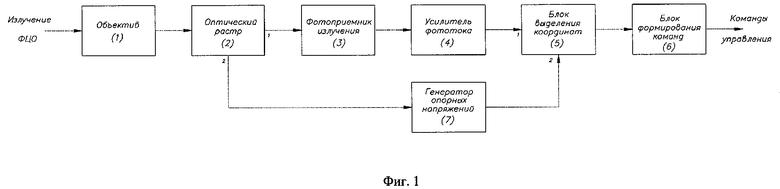
Наиболее близкой к предлагаемой является система наведения противотанковой ракеты, применяемая в ПТРК 9К114 "Конкурс" [1, Пусковая установка 9П135. Техническое описание и инструкция по эксплуатации, М. Военное издательство, 1974 г., стр.11-14]. Эта система наведения противотанковой ракеты была принята за прототип предполагаемого изобретения. Данная система наведения содержит последовательно соединенные объектив, принимающий сигнал от бортового источника излучения, оптический растр, фотоприемник излучения со сплошной чувствительной поверхностью, усилитель фототока, блок выделения координат и блок формирования команд, а также генератор опорных напряжений, подключенный к оптическому растру и блоку выделения координат. Функциональная схема системы наведения противотанковой ракеты приведена на фиг.1.
Система наведения противотанковой ракеты работает следующим образом. Входным воздействием для пеленгационного канала системы наведения ракеты является угловое отклонение противотанковой ракеты от линии прицеливания. Световой поток источника излучения проходит через объектив (1) и оптический растр (2), который имеет прозрачные и непрозрачные сектора, расположенные радиально, и совершает плоскопараллельное перемещение (сканирование), что обеспечивает частотную и пространственную селекцию светового потока бортового источника излучения. Частотная селекция обеспечивается выбором частоты модуляции излучения трассера растром и полосы пропускания усилителя фототока. Пространственная селекция обеспечивается выбором размеров секторов оптического растра, соизмеримых с размерами изображения бортового источника излучения, проецируемого объективом на растр. При этом энергия протяженных источников, изображение которых не вписывается в размеры сектора растра, не модулируется в границах рабочей полосы пропускания усилителя фототока. Частотно-модулированный световой поток воспринимается фотоприемником со сплошной фоточувствительной поверхностью (3) и преобразуется в соответствующие электрические сигналы, поступающие на вход усилитель фототока (4), где усиливается до необходимого значения. Выходной сигнал с усилителя фототока, содержащий информацию об угловых отклонениях противотанковой ракеты от линии прицеливания, поступает в блок выделения координат (5). Блок выделения координат вырабатывает напряжения, соответствующие линейным отклонениям противотанковой ракеты от линии прицеливания. Напряжения, пропорциональные отклонению противотанковой ракеты от линии прицеливания по курсу и тангажу, с выхода блока выделения координат поступают на блок формирования команд (6), где преобразуются в сигналы управления, предназначенные для передачи по проводной линии связи на противотанковую ракету.
Для выделения напряжения огибающей на частоте сканирования оптического растра и последующего его преобразования в постоянное напряжение, пропорциональное линейному отклонению противотанковой ракеты от линии визирования по курсу и тангажу, используется генератор опорных напряжений (7).
В современных условиях развития ПТРК необходимо решить задачу по устранению ряда конструктивных и функциональных недостатков, свойственных данным способу наведения противотанковой ракеты и системе наведения для его реализации. Так система наведения противотанковой ракетой работает только при наличии в поле зрения объектива пеленгационного канала источника полезного сигнала - бортового источника излучения противотанковой ракеты. Но при современных условиях ведения боевых действий фоноцелевая обстановка может содержать различные ослабляющие оптические помехи, например, дымка, туман, дымовые и аэрозольные завесы, которые могут существенно снижать уровень освещенности, создаваемый излучением бортового источника полезного сигнала на входном зрачке объектива, а при определенных условиях полностью перекрыть оптическую связь между бортовым источником излучения и объективом. При отсутствии в поле зрения объектива источника полезного сигнала прекращается как выделение его координат, так и формирование команд управления ракетой. В результате чего возможно либо искажение, либо отсутствие команд управления, передаваемых на ракету, что может привести к срыву управления ракетой, что недопустимо.
Задачей предлагаемого изобретения является разработка такого способа наведения управляемой ракеты и системы наведения для его реализации, которые позволили бы обеспечить возможность выделения координат бортового источника излучения в условиях действия ослабляющих помех, повысить качество и надежность процесса наведения управляемой ракеты без изменения конструкции самой ракеты и, как следствие, повысить помехозащищенность всей системы управления и упростить конструкцию аппаратуры управления.
Поставленная задача решается тем, что в способе наведения управляемой ракеты, включающем старт управляемой ракеты, прием и фокусировку на фотоприемнике излучения фоноцелевой обстановки с источником полезного сигнала, выделение координат источника полезного сигнала, определение координат управляемой ракеты и формирование команд управления ракетой, формирование команд управления ракетой осуществляют по текущим или прогнозируемым координатам бортового источника излучения, для чего до запуска управляемой ракеты всему полетному времени управляемой ракеты ставят в соответствие последовательность временных интервалов, из условия оптимального управления ракетой рассчитывают и запоминают пороговое значение δ для сравнения текущих и прогнозируемых координат бортового источника излучения, в каждом временном интервале формируют видеокадр фоноцелевой обстановки вместе с бортовым источником излучения, в каждом видеокадре выделяют и запоминают текущие координаты бортового источника излучения, рассчитывают прогнозируемые координаты бортового источника излучения в следующем временном интервале, а формирование команд управления осуществляют в соответствии с текущими координатами бортового источника излучения при их выделении, или прогнозируемыми, при невыделении координат бортового источника излучения, при этом при переходе от прогнозируемых координат к текущим координатам осуществляют сравнение вновь появившихся текущих и прогнозируемых координат бортового источника излучения, и, если разница между ними превышает пороговое значение δ, продолжают формирование команд управления ракетой на основе прогнозируемых координат бортового источника излучения и рассчитывают прогнозируемые координаты бортового источника излучения на основе выделенных текущих координат бортового источника излучения до того момента, пока разница между текущими и прогнозируемыми координатами не станет меньше, чем установленное пороговое значение δ, после чего осуществляют формирование команд управления на основе текущих координат бортового источника излучения.
Поставленная задача решается также тем, что в систему наведения управляемой ракеты, содержащую объектив, фотоприемник излучения, блок выделения координат и блок формирования команд, дополнительно введены последовательно соединенные блок прогноза и блок записи координат, второй вход которого соединен с первым выходом блока выделения координат, третий вход - со вторым выходом фотоприемником излучения, а выход - с блоком формирования команд, при этом выход объектива соединен со входом фотоприемника излучения, первый выход которого соединен с блоком выделения координат, второй выход которого соединен с блоком прогноза.
Функциональная схема системы наведения управляемой ракеты приведена на фиг.2.
Система наведения управляемой ракеты работает следующим образом. Объектив (1) пеленгационного канала осуществляет фокусировку излучения фоноцелевой обстановки непосредственно на фотоприемнике излучения (3). В качестве фотоприемника излучения используется фотоприемник с матричной структурой чувствительной поверхности, способный с определенной частотой формировать видеокадр с изображением фоноцелевой обстановки. Еще до запуска управляемой ракеты всему ее полетному времени ставят в соответствие последовательность временных интервалов определенной частоты повторения. Именно с такой частотой фотоприемник излучения с матричной структурой чувствительной поверхности будет формировать видеокадры в каждом временном интервале с изображение фоноцелевой обстановки. И именно с данной частотой в блок выделения координат (5) будут поступать массивы выходных сигналов с каждой ячейки фотоприемника излучения, пропорциональных энергетическим характеристикам всех объектов, находящихся в поле зрения объектива пеленгационного канала. Центральная ячейка фотоприемника излучения при этом находится на оптической оси пеленгационного канал. Таким образом, всему полетному времени управляемой ракеты ставится в соответствие последовательность временных интервалов, длительность которых равна длительности видеокадров изображения, формируемых на выходе фотоприемника излучения.
Световой поток от источника излучения обеспечивает засветку определенной области фотоприемника матричного типа. В каждом кадре сформированного изображения блок выделения координат (5) определяет местоположения данной области и выделяет текущие угловые координаты бортового источника излучения. После этого текущие координаты передаются в блок прогноза (7), где накапливаются и хранятся. В блоке прогноза на основании нескольких последних кадров осуществляется расчет прогнозируемых координат бортового источника излучения, которые он может занимать в следующем кадре. Рассчитываемые прогнозируемые координат постоянно корректируются с учетом обновления кадров.
Блок выделения координат для каждого кадра изображения передает в блок записи координат (8) сигналы, соответствующие текущим линейным отклонениям управляемой ракеты от линии прицеливания. Одновременно с этим блок прогноза передает в блок записи координат сигналы, соответствующие прогнозируемым линейным отклонениям управляемой ракеты от линии прицеливания, рассчитанные на основании нескольких последних кадров изображения. На выходе блока записи координат вырабатываются напряжения, пропорциональные отклонению управляемой ракеты от линии прицеливания по курсу и тангажу. Данные напряжения будут вырабатываться на основании текущих координат бортового источника излучения, рассчитанных в блоке выделения координат, при наличии источника полезного сигнала в поле управления пеленгационного канала, или на основании прогнозируемых, рассчитанных в блоке прогноза, при отсутствии бортового источника излучения в поле управления пеленгационного канала.
Выработка напряжений, пропорциональных отклонению управляемой ракеты от линии прицеливания по курсу и тангажу, на основе прогнозируемых координат осуществляется при отсутствии источника полезного сигнала в поле зрения пеленгационного канала, когда одновременно на выходе блока выделения координат не будет формироваться никакого сигнала или сигнал будет аномально низким, и с выхода фотоприемника излучения на вход блока записи координат будет поступать видеокадр изображения, где не будет источника, энергетические характеристики которого превосходили бы уровень фона.
В блоке записи координат осуществляется сравнение выделенных текущих и прогнозируемых координат бортового источника излучения. Это необходимо для того, чтобы в момент появления бортового источника излучения после отсутствия в течение произвольного промежутка времени исключить воздействия на систему возможного скачкообразного сигнала большой амплитуды, который может повлиять на процесс наведения ракетой. Это обусловлено тем, что за время отсутствия бортового источника излучения в поле зрения объектива и наведении ракеты по прогнозируемым координатам возможно накопление суммарной ошибки определения координат ракеты из-за работы алгоритма прогноза. Эта ошибка будет соответствовать разнице между истинными текущими координатами в момент появления вновь бортового источника излучения и прогнозируемыми на тот момент координатами. Если разница между текущими и прогнозируемыми координатами будет больше, чем пороговое значение δ, которое рассчитывается из условий обеспечения оптимального управления ракетой, то формирование команд управления ракетой осуществляют на основе прогнозируемых координат бортового источника излучения, а прогнозируемые координаты рассчитывают на основе выделяемых текущих координат бортового источника излучения. При этом координаты в блоке записи координат фильтруются для избежания скачкообразного их изменения. Этот процесс продолжается до тех пор, пока разница между текущими и прогнозируемыми координатами не станет меньше, чем установленное пороговое значение δ, после чего осуществляется формирование команд управления ракетой на основе текущих координат источника. Таким образом, осуществляется плавная коррекция прогнозируемых координат в соответствии с новыми текущими координатами бортового источника излучения.
Процесс перехода от текущих координат к прогнозируемым и плавного возвращения от прогнозируемых координат к текущим повторяется столько раз, сколько происходит пропадание бортового источника излучения из поля зрения объектива и его появление вновь в течение всего полетного времени управляемой ракеты.
Напряжения, сформированные в блоке записи координат, поступают на блок формирования команд (6), где преобразуются в сигналы управления ракетой, предназначенные для передачи по линии связи на управляемую ракету.
В предлагаемом устройстве наведения управляемой ракеты объектив, блок выделения координат, блок формирования команд могут быть выполнены как в прототипе. Фотоприемник матричного типа может быть выполнен на основе высокочастотной ПЗС-матрицы [2, Приборы с зарядовой связью / Под ред. М.Хоувза и Д.Моргана: Пер. с англ. - М.: Энергоиздат, 1981. - 376 с., ил.]. Блок прогноза и блок записи координат могут быть выполнены на основе сигнальных микропроцессоров [3, Руководство пользователя по сигнальным микропроцессорам ADSP-2100 / Пер. с англ. О.В.Луневой; Под ред. А.Д.Викторова; Санкт-Петербургский государственный электротехнический университет. - Санкт-Петербург, 1997. - 520 с.] или программируемых логических интегральных схем [4, В.Б.Стешенко. ПЛИС фирмы "ALTERA": Проектирование устройств обработки сигналов. / М.: "Додека", 2000 г.].
Обосновать работу системы можно следующим образом.
В каждом видеокадре осуществляется расчет координат смещения геометрического центра изображения бортового источника излучения управляемой ракеты относительно оптической оси:

где: Yc - координата оптической оси объектива по вертикали;
Zc - координата оптической оси объектива по горизонтали;
N - количество ячеек фотоприемника излучения, которые занимает изображение бортового источника излучения управляемой ракеты;
nyi, nzi - координаты ячеек фотоприемника излучения, которые занимает изображение бортового источника излучения.
Определение смещения энергетического центра изображения бортового источника излучения, соответствующей энергетическому центру данного изображения с учетом уровней сигналов si с фотоприемника излучения, а также определение смещения этой ячейки относительно координаты оптической оси объектива можно осуществить по формулам:

где: si - уровни выходных сигналов с ячеек фотоприемника излучения, на которых размещено изображение бортового источника излучения.
Использование зависимостей (1) целесообразно, как правило, на начальном участке управления, когда область засвеченного пространства от бортового источника излучения имеет значительные размеры, либо накладываются ограничения на допустимые вычислительные ресурсы аппаратуры управления при слабом требовании по точности выделения координат источника излучения.
Линейные координаты бортового источника излучения относительно оптической оси объектива определяются из (1) или соответственно из (2):

где D - текущая дальность до бортового источника излучения;
f - фокусное расстояние объектива;
δf - размер ячейки фотоприемника излучения;
Координаты источника излучения соответствуют дискретным моментам времени, пусть n - номер текущего видеокадра.
Математическая модель фильтрации и сглаживания переменных (3), осуществляемой в блоке записи координат, может быть представлена системой дифференциальных уравнений (4):
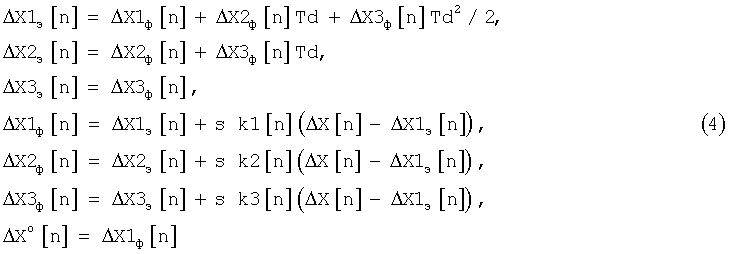
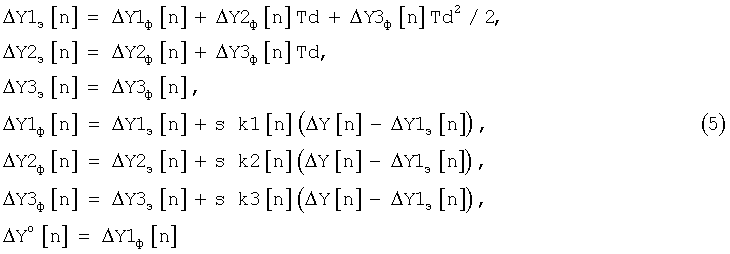
где s=1 при наличии изображения источника и s=0 при отсутствии изображения источника; k1[n], k2[n], k3[n] - коэффициенты фильтра.
При невыделении источника в видеокадре коэффициенты k1[n], k2[n], k3[n] обнуляются (s=0) и фильтр (4)-(5) переходит в режим прогнозирования.
При переходе от прогнозируемых координат к текущим координатам, если ошибка между выделенными и прогнозируемыми координатами бортового источника излучения превышает установленное пороговое значение δ, то наведение ракеты осуществляют по прогнозируемым координатам бортового источника излучения:

а прогнозируемые координаты (6) рассчитывают по (4) и (5), используя выделенные текущие координаты (3) бортового источника излучения. При этом s=1 и (4), (5) работает в режиме фильтрации.
Если ошибка между выделенными и прогнозируемыми координатами бортового источника излучения не превышает установленное пороговое значение δ, то наведение ракеты осуществляют по выделенным текущим координатам бортового источника излучения (3).
Для сформированных алгоритмов системы наведения осуществляется расчет параметров (1)-(6). Сформированная система со сглаживающим фильтром обеспечивает оценку траектории бортового источника излучения управляемой ракеты и плавный переход от прогнозируемых координат к текущим.
Таким образом, предлагаемые способ наведения управляемой ракеты и система наведения для его реализации обеспечивают:
- упрощение и повышение надежности конструкции аппаратуры наведения за счет исключения растровой системы;
- повышение надежности наведения управляемой ракеты за счет возможности наведения управляемой ракеты в условиях наличия ослабляющих помех в поле зрения пеленгационного канала и отсутствия оптической связи между объективом пеленгационного канала и источником полезного сигнала;
- расширение возможностей применения комплекса за счет обеспечения высокой помехозащищенности.
Литература
1. Пусковая установка 9П135. Техническое описание и инструкция по эксплуатации, М. Военное издательство, 1974 г. - прототип.
2. Приборы с зарядовой связью / Под ред. М.Хоувза и Д.Моргана: Пер. с англ. - М.: Энергоиздат, 1981. - 376 с., ил.
3. Руководство пользователя по сигнальным микропроцессорам ADSP-2100 / Пер. с англ. О.В.Луневой; Под ред. А.Д.Викторова; Санкт-Петербургский государственный электротехнический университет. - Санкт-Петербург, 1997. - 520 с.
4. В.Б.Стешенко. ПЛИС фирмы "ALTERA": Проектирование устройств обработки сигналов. / М.: "Додека", 2000 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2282127C2 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2290592C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2258887C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2282128C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2277688C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2406055C2 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2277689C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2260161C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2277690C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2539728C1 |
Изобретение относится к области разработки систем управления ракетами и может быть использовано в противотанковых ракетных комплексах (ПТРК). Технический результат - повышение качества и надежности процесса наведения управляемой ракеты без изменения конструкции самой ракеты и, как следствие, повышение помехозащищенности всей системы управления и упрощение конструкции аппаратуры управления. Способ наведения управляемой ракеты включает старт управляемой ракеты, прием и фокусировку на фотоприемнике излучения фоноцелевой обстановки с источником полезного сигнала, выделение координат источника полезного сигнала, определение координат управляемой ракеты и формирование команд управления ракетой. Формирование команд управления ракетой осуществляют по текущим или прогнозируемым координатам бортового источника излучения, для чего до запуска управляемой ракеты всему полетному времени управляемой ракеты ставят в соответствие последовательность временных интервалов, из условия оптимального управления ракетой рассчитывают и запоминают пороговое значение для сравнения текущих и прогнозируемых координат бортового источника излучения. В каждом временном интервале формируют видеокадр фоноцелевой обстановки вместе с бортовым источником излучения, в каждом видеокадре выделяют и запоминают текущие координаты бортового источника излучения, рассчитывают прогнозируемые координаты бортового источника излучения в следующем временном интервале, а формирование команд управления осуществляют в соответствии с текущими координатами бортового источника излучения при их выделении, или прогнозируемыми, при невыделении координат бортового источника излучения. При этом при переходе от прогнозируемых координат к текущим координатам осуществляют сравнение вновь появившихся текущих и прогнозируемых координат бортового источника излучения, и, если разница между ними превышает пороговое значение, продолжают формирование команд управления ракетой на основе прогнозируемых координат бортового источника излучения и рассчитывают прогнозируемые координаты бортового источника излучения на основе выделенных текущих координат бортового источника излучения до того момента, пока разница между текущими и прогнозируемыми координатами не станет меньше, чем установленное пороговое значение, после чего осуществляют формирование команд управления на основе текущих координат бортового источника излучения. В систему наведения управляемой ракеты, содержащую объектив, фотоприемник излучения, блок выделения координат и блок формирования команд дополнительно введены последовательно соединенные блок прогноза и блок записи координат, второй вход которого соединен с первым выходом блока выделения координат, третий вход - со вторым выходом фотоприемником излучения, а выход - с блоком формирования команд. При этом выход объектива соединен со входом фотоприемника излучения, первый выход которого соединен с блоком выделения координат, второй выход которого соединен с блоком прогноза. 2 н.п. ф-лы, 2 ил.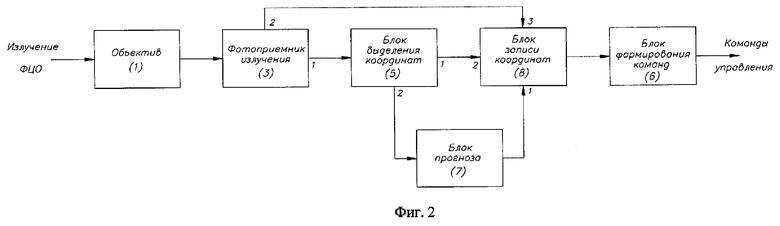
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| - М.: Военное издательство, 1975, с.11-14 | |||
| US 4027837 А, 07.06.1977 | |||
| СТОПОР ДЛЯ ОТСЕЧКИ ШЛАКА В КОНВЕРТЕРЕ | 1998 |
|
RU2148656C1 |
| ВНУТРИМАТОЧНЫЙ КОНТРАЦЕПТИВ | 1992 |
|
RU2049449C1 |
| СПОСОБ СТРЕЛЬБЫ СНАРЯДОМ И СТРЕЛЯЮЩИЙ КОМПЛЕКС | 2001 |
|
RU2210725C2 |

