Предлагаемый способ наведения управляемой ракеты и система наведения для его реализации относятся к области разработки систем управления ракетами и могут быть использованы в противотанковых ракетных комплексах (ПТРК).
Наиболее близким к предлагаемому является способ наведения противотанковой ракеты, реализованный в ПТРК 9К111 "Фагот" и взятый в качестве прототипа [1. Пусковая установка 9П135. Техническое описание. Ордена Трудового Красного Знамени Военное издательство Министерства обороны СССР, Москва, 1975 г., с.11-13], включающий запуск противотанковой ракеты с бортовым источником излучения, прохождение светового потока от источника излучения через объектив и оптический растр, модуляцию светового потока с помощью оптического растра, прием модулированного светового потока от источника излучения фотоприемником со сплошной фоточувствительной поверхностью, выделение координат бортового источника излучения, определение координат противотанковой ракеты и формирование команд управления противотанковой ракетой.
Наиболее близкой к предлагаемой является система наведения противотанковой ракеты, реализующая известный способ наведения противотанковой ракеты и применяемая в переносном ПТРК 9К111 "Фагот" [1]. Эта система наведения содержит последовательно соединенные объектив, принимающий сигнал от бортового источника излучения, оптический растр, фотоприемник излучения, усилитель фототока, блок выделения координат и блок формирования команд, а также генератор опорных напряжений, подключенный между оптическим растром и блоком выделения координат.
Функциональная схема системы наведения противотанковой ракеты, реализующей известный способ наведения противотанковой ракеты, приведена на фиг.1.
Система наведения противотанковой ракеты работает следующим образом. Входным воздействием для нее является угловое отклонение бортового источника излучения противотанковой ракеты от линии прицеливания. Объектив (1) фокусирует излучение фоноцелевой обстановки (ФЦО) с бортовым источником излучения на оптическом растре (2), который имеет прозрачные и непрозрачные сектора, расположенные радиально, и совершает плоскопараллельное перемещение (сканирование), что обеспечивает частотную модуляцию и пространственную селекцию светового потока бортового источника излучения. Частотно-модулированный световой поток воспринимается фотоприемником излучения (3) и преобразуется в соответствующие электрические сигналы. Частотно-модулированный сигнал с фотоприемника поступает в усилитель фототока (4), где усиливается до необходимого значения. Выходной сигнал с усилителя фототока содержит информацию об угловых отклонениях источника излучения ракеты от линии прицеливания, которая поступает в блок выделения координат (5). После преобразования сигнала усилителя фототока блок выделения координат вырабатывает напряжения, соответствующие уже линейным отклонениям ракеты от линии прицеливания. В качестве опорных напряжений при фазовом детектировании используются сигналы с генератора опорных напряжений (7). Напряжения, пропорциональные отклонения ракеты от линии прицеливания по курсу и тангажу, с выхода блока выделения координат поступают на блок формирования команд (6), где преобразуются в сигналы управления, предназначенные для передачи по проводной линии связи (ПЛС) на ракету.
Современные условия развития ПТРК поставили задачу решения ряда принципиальных технических особенностей, свойственных данным способу наведения противотанковой ракеты и системе наведения для его реализации. Так система наведения противотанковой ракетой устойчиво работает только при наличии в поле зрения объектива одного единственного источника полезного сигнала - бортового источника излучения противотанковой ракеты. Но при современных условиях ведения боевых действий фоноцелевая обстановка (ФЦО) может содержать высокоинтенсивные световые помехи - источники оптических помех (ОП), количество которых может быть произвольным. При попадании излучения такой световой помехи совместно с полезным источником излучения в поле зрения объектива возможен срыв управления ракетой, несмотря на частотную модуляцию и пространственную селекцию светового потока бортового источника излучения оптическим растром. Это обусловлено тем, что фотоприемник будет вырабатывать сигнал, соответствующий среднегеометрическому положению всех источников излучения, находящихся в поле зрения объектива, а это приведет к существенному снижению точности выделения координат бортового источника излучения. Кроме того, для осуществления модуляции светового потока необходимо соблюдать как высокие технологические требования по установке и юстировке оптического растра, так и обеспечивать высокие точностные характеристики при стабилизации частоты опорного напряжения. К тому же, фотоприемник может вносить высокие шумовые составляющие в результирующий сигнал на его выходе (особенно при высоких температурах эксплуатации), что существенно уменьшает соотношение сигнал/шум в системе управления.
Задачей предлагаемого изобретения является разработка такого способа наведения управляемой ракеты и системы наведения для его реализации, которые позволили бы повысить качество и надежность процесса наведения управляемой ракеты без изменения конструкции самой ракеты, осуществлять селекцию источника полезного сигнала среди возможных оптических помех, существенно упростить конструкцию аппаратуры управления, повысить соотношение сигнал/шум и, как следствие, повысить помехозащищенность всей системы управления.
Поставленная задача решается тем, что в способе наведения управляемой ракеты, включающем старт управляемой ракеты, прием и фокусировку на фотоприемнике излучения фоноцелевой обстановки с источником полезного сигнала, выделение координат источника полезного сигнала, определение координат управляемой ракеты и формирование команд управления для передачи на ракету, до старта управляемой ракеты устанавливают программное изменение во времени величины допуска δр на изменение геометрических размеров изображения источника полезного сигнала, а в каждый момент времени определения координат управляемой ракеты после фокусировки излучения фоноцелевой обстановки на фотоприемнике определяют текущие линейные размеры изображений всех источников излучения, присутствующих в поле зрения объектива, рассчитывают эталонные линейные размеры изображения источника полезного сигнала, сравнивают полученные текущие линейные размеры изображения каждого из источников с рассчитанными эталонными линейными размерами изображения источника полезного сигнала и выделяют координаты того источника излучения, полученные текущие линейные размеры изображения которого равны эталонным или отличаются от них на величину, не превышающую установленного допуска δр.
Поставленная задача решается также тем, что в систему наведения управляемой ракеты, содержащую последовательно соединенные объектив и фотоприемник излучения, последовательно соединенные блок выделения координат и блок формирования команд, дополнительно введены блок расчета эталонных линейных размеров источника полезного сигнала и последовательно соединенные устройство селекции и устройство сравнения, при этом фотоприемник излучения выполнен на основе фоточувствительного прибора матричного типа, выход фотоприемника излучения подключен к входу устройства селекции, второй вход устройства сравнения подключен к выходу блока расчета эталонных линейных размеров источника полезного сигнала, а выход подключен к входу блока выделения координат.
Сущность способа заключается в следующем. Излучение фоноцелевой обстановки, включающее возможные источники ОП и бортовой источник излучения управляемой ракеты, попадает на входной зрачок объектива оптической системы и фокусируется на чувствительных ячейках фотоприемника. Источники ОП могут находиться на различных дальностях и иметь различные геометрические размеры, а в процессе полета управляемой ракеты они могут быть как неподвижны, так и перемещаться в поле зрения объектива. В зависимости от фокусного расстояния объектива, текущего местоположения источника излучения относительно объектива (дальности до источника) и геометрических размеров конкретного источника излучения на чувствительной поверхности фотоприемника излучения образуются изображения всех источников излучения (источников ОП и бортового источника излучения управляемой ракеты), текущие линейные размеры которых определяются по выражению:


где НY - текущий линейный размер изображения источника излучения по вертикали;
НZ - текущий линейный размер изображения источника излучения по горизонтали;
hY - геометрический размер источника излучения по вертикали;
hZ - геометрический размер источника излучения по горизонтали;
f' - фокусное расстояние объектива;
D - расстояние от объектива до источника излучения.
Для выделения изображения бортового источника излучения из общего количества изображений источников излучения (селекции на фоне источников ОП) на основе определенной текущей полетной дальности до управляемой ракеты, текущего фокусного расстояния объектива и геометрических размеров, присущих только бортовому источнику излучения управляемой ракеты, осуществляется расчет эталонных линейных размеров, которые должно иметь изображение бортового источника излучения в текущий момент времени:


где  - эталонный текущей размер изображения бортового источника излучения управляемой ракеты по вертикали;
- эталонный текущей размер изображения бортового источника излучения управляемой ракеты по вертикали;
 - эталонный текущей размер изображения бортового источника излучения управляемой ракеты по горизонтали;
- эталонный текущей размер изображения бортового источника излучения управляемой ракеты по горизонтали;
 - геометрический размер бортового источника излучения управляемой ракеты по вертикали;
- геометрический размер бортового источника излучения управляемой ракеты по вертикали;
 - геометрический размер бортового источника излучения управляемой ракеты по горизонтали;
- геометрический размер бортового источника излучения управляемой ракеты по горизонтали;
f' - фокусное расстояние объектива;
Dp - текущая дальность до управляемой ракеты;
ΔY TEX - технологическая добавка по вертикали;
ΔZ TEX - технологическая добавка по горизонтали.
Технологические добавки к эталонным текущим размерам бортового источника излучения необходимы для учета аберрационных размытий объектива, а также возможных разъюстировок и температурных подвижек фотоприемника вдоль оптической оси объектива.
Расчет эталонных текущих размеров изображения бортового источника излучения управляемой ракеты осуществляется параллельно с определением текущих линейных размеров всех изображений источников излучения, причем для этого необходимо согласовывать моменты времени данных расчетов.
Выделение из общего числа изображений источников излучения изображения бортового источника излучения управляемой ракеты осуществляется путем сравнения текущих линейных размеров всех изображений источников излучения, рассчитанных по формулам (1)-(2), с эталонными текущими размерами изображения бортового источника излучения управляемой ракеты, рассчитанными по формулам (3)-(4).
После этого производится сравнение полученных текущих линейных размеров каждого изображения по вертикали и горизонтали с рассчитанными соответствующими эталонными текущими размерами изображения бортового источника излучения:


где δр - величина допуска на изменение геометрических размеров изображения источника полезного сигнала.
В результате проведенного сравнения выделяют изображение источника излучения, текущие линейные размеры которого максимально соответствуют эталонным текущим размерам изображения бортового источника излучения. После этого определяются координаты выделенного изображения, а остальные изображения источников излучения не рассматриваются. Далее определяется угловое отклонение бортового источника излучения управляемой ракеты относительно линии визирования, определяются координаты бортового источника излучения управляемой ракеты, на основании которых далее в системе наведения производится расчет текущих координат управляемой ракеты и формирование команд управления.
Величина допуска на изменение геометрических размеров изображения источника полезного сигнала δр может быть как процентной зависимостью от геометрических размеров источника полезного сигнала с учетом полетной дальности управляемой ракеты, так и постоянной величиной для каждого момента времени, которая подбирается исходя из условий боевого применения комплекса.
Предложенный способ наведения позволяет разделять изображения источников излучения на чувствительной поверхности фотоприемника и селектировать изображение бортового источника излучения управляемой ракеты среди изображений источников ОП по отличительным признакам: известным геометрическим размерам и удаленности в конкретный момент времени.
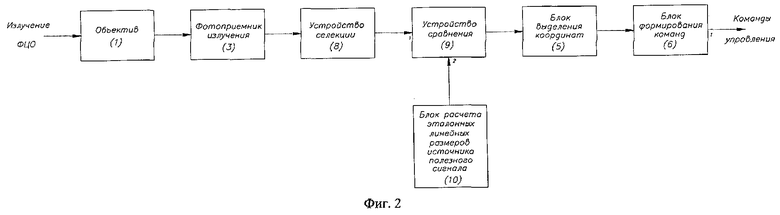
Функциональная схема системы наведения управляемой ракеты приведена на фиг.2.
Система наведения управляемой ракеты работает следующим образом. Излучение фоноцелевой обстановки (ФЦО) с бортовым источником излучения объектив (1) фокусирует непосредственно на фотоприемнике излучения (3), выполненном на основе фоточувствительного прибора матричного типа, на чувствительных ячейках которого образуются изображения, соответствующие всем источникам излучения, которые в данный момент времени присутствуют в поле зрения объектива. После этого устройство селекции (8) определяет местоположения областей изображений источников излучения и линейные размеры данных изображений. Далее устройство сравнения (9) на основе полученных данных из блока расчета эталонных размеров источника полезного сигнала (10), в котором рассчитываются, какие размеры изображения должен иметь в текущий момент времени бортовой источник излучения, определяет изображение, которое соответствует источнику полезного сигнала. Выходной сигнал с устройства сравнения содержит информацию об угловых отклонениях бортового источника излучения управляемой ракеты от линии прицеливания, которая поступает в блок выделения координат (5). После преобразования сигнала из устройства селекции блок выделения координат вырабатывает напряжения, соответствующие уже линейным отклонениям ракеты от линии прицеливания. Напряжения, пропорциональные отклонения ракеты от линии прицеливания по курсу и тангажу, с выхода блока выделения координат поступают на блок формирования команд (6), где преобразуются в сигналы управления, предназначенные для передачи на ракету.
В предлагаемой системе наведения управляемой ракеты объектив, блок выделения координат и блок формирования команд могут быть выполнены как в прототипе. Фотоприемник излучения может быть выполнен на основе высокочастотной ПЗС-матрицы [2]. Устройство селекции, устройство сравнения и блок расчета эталонных линейных размеров источника полезного сигнала могут быть выполнены на основе цифровых процессоров обработки сигналов [3] и (или) программируемых логических интегральных схем [4].
Предлагаемые способ наведения управляемой ракеты и система наведения для его осуществления по сравнению с прототипами позволяют достичь:
- упрощения конструкции системы наведения, уменьшения ее габаритно-массовых характеристик;
- существенного повышения надежности и помехозащищенности системы наведения;
- повышения точности наведения управляемой ракеты без изменения конструкции самой ракеты;
- увеличения соотношения сигнал/шум за счет применения фотоприемника матричного типа с низким уровнем собственного шума.
Источники литературы
1. Пусковая установка 9П135. Техническое описание. Ордена Трудового Красного Знамени Военное издательство Министерства обороны СССР, Москва, 1975 г., с.11-13 - прототип.
2. Приборы с зарядовой связью / Под ред. М.Хоувза и Д.Моргана: Пер. с англ. - М.: Энергоиздат, 1981. - 376 с., ил.
3. Руководство пользователя по сигнальным микропроцессорам ADSP-2100 / Пер. с англ. О.В.Луневой; Под ред. А.Д.Викторова; Санкт-Петербургский государственный электротехнический университет. - Санкт-Петербург, 1997. - 520 с.
4. В.Б.Стешенко. ПЛИС фирмы "ALTERA": Проектирование устройств обработки сигналов. / М.: "Додека", 2000 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2290593C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2282128C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2290592C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2282127C2 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2277689C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2258887C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2277688C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2406055C2 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2277690C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2539728C1 |
Изобретение относится к области разработки систем управления ракетами и может быть использовано в противотанковых ракетных комплексах (ПТРК). Технический результат - повышение качества и надежности процесса наведения управляемой ракеты без изменения конструкции самой ракеты, осуществление селекции источника полезного сигнала среди возможных оптических помех, упрощение конструкции аппаратуры управления, повышение соотношения сигнал/шум, и, как следствие, повышение помехозащищенности всей системы управления. Технический результат достигается тем, что в способе наведения управляемой ракеты, включающем старт управляемой ракеты, прием и фокусировку на фотоприемнике излучения фоноцелевой обстановки с источником полезного сигнала, выделение координат источника полезного сигнала, определение координат управляемой ракеты и формирование команд управления для передачи на ракету, до старта управляемой ракеты устанавливают программное изменение во времени величины допуска δр на изменение геометрических размеров изображения источника полезного сигнала. В каждый момент времени определения координат управляемой ракеты после фокусировки излучения фоноцелевой обстановки на фотоприемнике определяют текущие линейные размеры изображений всех источников излучения, присутствующих в поле зрения объектива. Рассчитывают эталонные линейные размеры изображения источника полезного сигнала, сравнивают полученные текущие линейные размеры изображения каждого из источников с рассчитанными эталонными линейными размерами изображения источника полезного сигнала и выделяют координаты того источника излучения, полученные текущие линейные размеры изображения которого равны эталонным или отличаются от них на величину, не превышающую установленного допуска δр. Поставленная задача решается также тем, что в систему наведения управляемой ракеты, содержащую последовательно соединенные объектив и фотоприемник излучения, последовательно соединенные блок выделения координат и блок формирования команд дополнительно введены блок расчета эталонных линейных размеров источника полезного сигнала и последовательно соединенные устройство селекции и устройство сравнения. При этом фотоприемник излучения выполнен на основе фоточувствительного прибора матричного типа, выход фотоприемника излучения подключен к входу устройства селекции, второй вход устройства сравнения подключен к выходу блока расчета эталонных линейных размеров источника полезного сигнала, а выход подключен к входу блока выделения координат. 2 н.п. ф-лы, 2 ил.
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| М.: Военное издательство, 1975, с.11-13 | |||
| US 4027837 A, 07.06.1977 | |||
| СТОПОР ДЛЯ ОТСЕЧКИ ШЛАКА В КОНВЕРТЕРЕ | 1998 |
|
RU2148656C1 |
| ВНУТРИМАТОЧНЫЙ КОНТРАЦЕПТИВ | 1992 |
|
RU2049449C1 |
| СПОСОБ СТРЕЛЬБЫ СНАРЯДОМ И СТРЕЛЯЮЩИЙ КОМПЛЕКС | 2001 |
|
RU2210725C2 |

