Предлагаемый способ наведения управляемой ракеты и система наведения для его реализации относятся к области разработки систем управления ракетами и могут быть использованы в противотанковых ракетных комплексах (ПТРК).
Наиболее близким к предлагаемому является способ наведения противотанковой ракеты, реализованный в ПТРК 9К114 "Конкурс" и взятый в качестве прототипа [1, Пусковая установка 9П135. Техническое описание и инструкция по эксплуатации, М.: Военное издательство, 1974 г., стр.11-14], включающий запуск противотанковой ракеты с бортовым источником излучения, прохождение светового потока от источника излучения через объектив и оптический растр, модуляцию светового потока с помощью оптического растра, прием модулированного светового потока от источника излучения фотоприемником со сплошной фоточувствительной поверхностью, выделение координат бортового источника излучения, определение координат противотанковой ракеты и формирование команд управления противотанковой ракетой.
Наиболее близкой к предлагаемой является система наведения противотанковой ракеты, применяемая в ПТРК 9К114 "Конкурс" [1, Пусковая установка 9П135. Техническое описание и инструкция по эксплуатации, М.: Военное издательство, 1974 г., стр.11-14]. Эта система наведения противотанковой ракеты была принята за прототип предлагаемого изобретения. Данная система наведения содержит последовательно соединенные объектив, принимающий сигнал от бортового источника излучения, оптический растр, фотоприемник излучения со сплошной чувствительной поверхностью, усилитель фототока, блок выделения координат и блок формирования команд, а также генератор опорных напряжений, подключенный к оптическому растру и блоку выделения координат. Функциональная схема системы наведения противотанковой ракеты приведена на фиг.1.
Система наведения противотанковой ракеты работает следующим образом. Входным воздействием для системы наведения ракеты является угловое отклонение противотанковой ракеты от линии прицеливания. Световой поток источника излучения проходит через объектив (1) и оптический растр (2), который имеет прозрачные и непрозрачные сектора, расположенные радиально, и совершает плоскопараллельное перемещение (сканирование), что обеспечивает частотную и пространственную селекцию светового потока бортового источника излучения. Частотная селекция обеспечивается выбором частоты модуляции излучения трассера растром и полосы пропускания усилителя фототока. Пространственная селекция обеспечивается выбором размеров секторов оптического растра, соизмеримых с размерами изображения бортового источника излучения, проецируемого объективом на растр. При этом энергия протяженных источников, изображение которых не вписывается в размеры сектора растра, не модулируется в границах рабочей полосы пропускания усилителя фототока. Частотно-модулированный световой поток воспринимается фотоприемником со сплошной фоточувствительной поверхностью (3) и преобразуется в соответствующие электрические сигналы, поступающие на вход усилитель фототока (4), где усиливается до необходимого значения. Выходной сигнал с усилителя фототока, содержащий информацию об угловых отклонениях противотанковой ракеты от линии прицеливания, поступает в блок выделения координат (5). Блок выделения координат вырабатывает напряжения, соответствующие линейным отклонениям противотанковой ракеты от линии прицеливания. Напряжения, пропорциональные отклонению противотанковой ракеты от линии прицеливания по курсу и тангажу, с выхода блока выделения координат поступают на блок формирования команд (6), где преобразуются в сигналы управления, предназначенные для передачи по проводной линии связи на противотанковую ракету.
Для выделения напряжения огибающей на частоте сканирования оптического растра и последующего его преобразования в постоянное напряжение, пропорциональное линейному отклонению противотанковой ракеты от линии визирования по курсу и тангажу, используется генератор опорных напряжений (7).
В современных условиях развития ПТРК необходимо решить задачу по устранению ряда конструктивных и функциональных недостатков, свойственных данным способу наведения противотанковой ракеты и системе наведения для его реализации. Так система наведения противотанковой ракетой устойчиво работает только при наличии в поле зрения объектива одного источника полезного сигнала - бортового источника излучения противотанковой ракеты. Но при современных условиях ведения боевых действий фоноцелевая обстановка (ФЦО) может содержать высокоинтенсивные оптические помехи, например, пожары, прожектора, разрывы снарядов, световые гранаты и т.д., причем количество оптических помех может быть произвольным. В соответствии с принципом работы приведенной системы наведения противотанковой ракеты излучение оптической помехи, попавшей в его поле зрения, оказывает влияние на точность выделения координат бортового источника излучения. Степень влияния оптической помехи на систему наведения зависит от энергетических и геометрических характеристик помехи, а также от расположения помехи относительно линии визирования. Например, при нахождении оптической помехи в поле зрения объектива, при определенном соотношении помеха/сигнал, может произойти потеря сопровождения бортового источника излучения ракеты и перезахват помехи, что неизбежно приведет к срыву управления ракетой. Существующая система наведения противотанковой ракеты, в случае наличия в поле зрения объектива помимо бортового источника полезного сигнала еще одного или несколько источников оптических помех, не способна отделить бортовой источник излучения ракеты от помехи. При большом количестве помех может произойти захват помехи или потеря сигнала бортового источника ракеты, что приведет к срыву управления, что недопустимо.
Задачей предлагаемого изобретения является разработка такого способа наведения управляемой ракеты и системы наведения для его реализации, которые позволили бы обеспечить возможность выделения координат бортового источника излучения на фоне различных высокоинтенсивных оптических помех, повысить качество и надежность процесса наведения управляемой ракеты без изменения конструкции самой ракеты и, как следствие, повысить помехозащищенность всей системы управления и упростить конструкцию аппаратуры управления.
Поставленная задача решается тем, что в способе наведения управляемой ракеты, включающем старт управляемой ракеты с бортовым источником излучения, прием и фокусировку объективом светового потока фоноцелевой обстановки, выделение координат бортового источника излучения управляемой ракеты, определение координат управляемой ракеты и формирование команд управления, до старта управляемой ракеты рассчитывают и запоминают интервал времени t, который проходит от момента подачи питания на аппаратуру управления до появления управляемой ракеты в поле зрения объектива, рассчитывают и запоминают значение сигнала Uш, учитывающего внутренние шумы фотоприемника и освещенность фона, а после старта фокусировку объективом светового потока фоноцелевой обстановки осуществляют на фотоприемнике с матричной структурой фоточувствительной поверхности, центральная ячейка которого находится на оптической оси объектива, определяют ячейки фотоприемника излучения, сигнал на выходе которых превышает величину сигнала Uш, запоминают их номера в массиве данных N1 i,j, по истечении интервала времени t определяют ячейки фотоприемника излучения, сигнал на выходе которых превышает величину Uш, запоминают их номера в массиве данных N2 i,j, сравнивают номера ячеек фотоприемника из массива данных N2 i,j с номерами ячеек фотоприемника из массива данных N1 i,j и осуществляют выделение координат бортового источника излучения управляемой ракеты в соответствии с расположением тех ячеек фотоприемника относительно центральной ячейки, которые присутствуют в массиве данных N2 i,j, но отсутствуют в массиве данных N1 i,j.
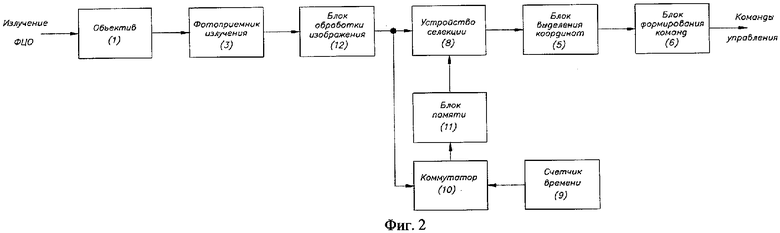
Поставленная задача решается также тем, что в систему наведения управляемой ракеты, содержащую объектив, фотоприемник излучения и последовательно соединенные блок выделения координат и блок формирования команд, дополнительно введены блок обработки изображения и последовательно соединенные счетчик времени, коммутатор, блок памяти и устройство селекции, выход которого соединен с входом блока выделения координат, при этом выход объектива соединен со входом фотоприемника излучения, выход которого соединен со входом блока обработки изображения, выход которого соединен со входами коммутатора и устройства селекции, причем сам фотоприемник излучения выполнен на основе фотоприемника матричного типа.
Сущность способа и системы наведения, его реализующей, заключается в выделении координат всех источников излучения, находящихся в поле зрения объектива, разделении изображений всех источников излучения, проецируемых на фотоприемник матричного типа, определении изображения источника полезного сигнала и выделении его координат, на основании которых рассчитываются координаты управляемой ракеты и формируются команды управления.
Функциональная схема системы наведения управляемой ракеты приведена на фиг.2.
Система наведения управляемой ракеты работает следующим образом. После нажатия на спусковой крючок осуществляется выход батареи питания на режим и обеспечение питанием всех составных элементов системы наведения. Еще до старта управляемой ракеты рассчитывается момент времени t, который учитывает время от момента подачи питания на аппаратуру управления до появления управляемой ракеты в поле зрения объектива. Этот промежуток времени включает время, необходимое для завершения всех переходных процессов в элементах системы управления, для прохождения всех вспомогательных команд, в том числе и на запуск управляемой ракеты, а также - время на движение управляемой ракеты по контейнеру. Момент времени t определяется достаточно точно при разработке комплекса.
В блоке обработки изображения (12) запоминается рассчитанный также до старта управляемой ракеты сигнала Uш, учитывающий внутренние шумы фотоприемника и освещенность фона. Сигнал Uш может быть рассчитать исходя из паспортных данных на фотоприемник излучения, в которых производитель указывает как максимальный уровень выходного сигнала, так и уровень внутренних шумов. Кроме этого, предварительно можно рассчитать уровень сигнала на выходе фотоприемника при освещенности того или иного фона. Рассчитанный пороговый сигнал Uш должен превышать суммарный сигнал внутренних шумов и сигнал от освещенности фона с каким-то запасом, обусловленным условиями боевого применения.
Объектив оптической системы (1) фокусирует световой поток фоноцелевой обстановки непосредственно на фотоприемник излучения матричного типа (3). На его выходе образуются видеокадры изображения фоноцелевой обстановки, отражающие энергетические характеристики всех объектов, находящихся в поле зрения объектива.
В блоке обработки изображения (12) определяются ячейки фотоприемника излучения, сигнал на выходе которых превышает величину Uш. Номера данных ячеек образуют массив данных N1 i,j, который поступает одновременно на устройство селекции (8) и в блок памяти (11). Таким образом, на входы устройства селекции поступает два одинаковых массива данных, что при сравнении соответствующих ячеек образует суммарный сигнал, равный нулю. Пока управляемой ракеты нет в поле зрения объектива, на выходе устройства селекции будет формироваться нулевой сигнал сравнения двух одинаковых массивов.
Время t, которое проходит от момента обеспечения питанием аппаратуры управления до появления управляемой ракеты в поле зрения объектива, заложено в счетчике времени (9), который при достижении момента времени t, т.е. в момент появления управляемой ракеты в поле зрения объектива, с помощью коммутатора (10) прекращает запись данных в блок памяти (11). Таким образом, на вход устройства селекции поступает массив данных N2 i,j, в котором определены номера ячеек фотоприемника излучения, сигнал на выходе которых превышает величину Uш и в котором присутствуют номера ячеек, на которые спроецировано изображение бортового источника управляемой ракеты, и запомненный массив данных N1 i,j. После этого сравниваются номера ячеек фотоприемника из массива данных N2 i,j с соответствующими номерами ячеек фотоприемника из массива данных N1 i,j, и осуществляется выделение ячеек фотоприемника излучения, которые присутствуют в массиве данных N2 i,j, но отсутствуют в массиве данных N1 i,j. Именно на этих ячейках образовалось изображение бортового источника излучения управляемой ракеты. По их расположению относительно центральной ячейки можно судить об угловом положении источника излучения относительно оптической оси объектива.
Блок выделения координат (5) преобразует сигнал с выхода устройства селекции (8), содержащий информацию об угловых отклонениях источника излучения противотанковой ракеты от линии прицеливания, в напряжения, соответствующие линейным отклонениям противотанковой ракеты от линии прицеливания. Напряжения, пропорциональные отклонению противотанковой ракеты от линии прицеливания по курсу и тангажу, с выхода блока выделения координат поступают на блок формирования команд (6), где преобразуются в сигналы управления, предназначенные для передачи по проводной линии связи на противотанковую ракету.
В предлагаемом устройстве наведения управляемой ракеты объектив, блок выделения координат, блок формирования команд могут быть выполнены, как в прототипе. Фотоприемник матричного типа может быть выполнен на основе высокочастотной ПЗС-матрицы [2, Приборы с зарядовой связью/ Под ред. М.Хоувза и Д.Моргана: Пер. с англ. - М.: Энергоиздат, 1981. - 376 с., ил.]. Устройство селекции, блок памяти, счетчик времени, коммутатор могут быть выполнены на основе сигнальных микропроцессоров [3, Руководство пользователя по сигнальным микропроцессорам ADSP-2100/ Пер. с англ. О.В.Луневой; Под ред. А.Д.Викторова; Санкт-Петербургский государственный электротехнический университет. - Санкт-Петербург, 1997. - 520 с.] или программируемых логических интегральных схем [4, В.Б.Стешенко. ПЛИС фирмы "ALTERA": Проектирование устройств обработки сигналов./ М.: "Додека", 2000 г.].
Таким образом, предлагаемые способ наведения управляемой ракеты и система наведения для его реализации обеспечивают:
- повышение надежности конструкции аппаратуры наведения за счет исключения растровой системы;
- повышение точности наведения управляемой ракеты без изменения конструкции самой ракеты за счет повышения точности выделения координат бортового источника излучения управляемой ракеты;
- повышение помехозащищенности системы наведения за счет отделения изображения бортового источника излучения ракеты при наличии в поле зрения пеленгатора высокоинтенсивных или протяженных оптических помех;
- расширение возможностей применения комплекса за счет обеспечения высокой помехозащищенности.
Источники информации
1. Пусковая установка 9П135. Техническое описание и инструкция по эксплуатации, М.: Военное издательство, 1974 г. - прототип.
2. Приборы с зарядовой связью/ Под ред. М.Хоувза и Д.Моргана: Пер. с англ. - М.: Энергоиздат, 1981. - 376 с., ил.
3. Руководство пользователя по сигнальным микропроцессорам ADSP-2100/ Пер. с англ. О.В.Луневой; Под ред. А.Д.Викторова; Санкт-Петербургский государственный электротехнический университет. - Санкт-Петербург, 1997. - 520 с.
4. В.Б.Стешенко. ПЛИС фирмы "ALTERA": Проектирование устройств обработки сигналов./ М.: "Додека", 2000 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2277689C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2290593C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2277688C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2290592C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2282127C2 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2258887C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2260161C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2277690C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2406055C2 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2539728C1 |
Изобретения относятся к области разработки систем управления ракетами и могут быть использованы в противотанковых ракетных комплексах (ПТРК). Технический результат - повышение качества и надежности процесса наведения управляемой ракеты без изменения конструкции самой ракеты и, как следствие, повышение помехозащищенности всей системы управления и упрощение конструкции аппаратуры управления. В способе наведения управляемой ракеты, включающем старт управляемой ракеты с бортовым источником излучения, прием и фокусировку объективом светового потока фоноцелевой обстановки, выделение координат бортового источника излучения управляемой ракеты, определение координат управляемой ракеты и формирование команд управления, до старта управляемой ракеты рассчитывают и запоминают интервал времени, который проходит от момента подачи питания на аппаратуру управления до появления управляемой ракеты в поле зрения объектива, рассчитывают и запоминают значение сигнала, учитывающего внутренние шумы фотоприемника и освещенность фона, а после старта фокусировку объективом светового потока фоноцелевой обстановки осуществляют на фотоприемнике с матричной структурой фоточувствительной поверхности, центральная ячейка которого находится на оптической оси объектива. Определяют ячейки фотоприемника излучения, сигнал на выходе которых превышает величину сигнала, учитывающего внутренние шумы фотоприемника, запоминают их номера в первом массиве данных, по истечении запомненного интервала времени определяют ячейки фотоприемника излучения, сигнал на выходе которых превышает величину внутренних шумов фотоприемника, запоминают их номера во втором массиве данных, сравнивают номера ячеек фотоприемника из второго массива данных с номерами ячеек фотоприемника из первого массива данных и осуществляют выделение координат бортового источника излучения управляемой ракеты в соответствии с расположением тех ячеек фотоприемника относительно центральной ячейки, которые присутствуют во втором массиве данных, но отсутствуют в первом массиве данных. В систему наведения управляемой ракеты, содержащую объектив, фотоприемник излучения и последовательно соединенные блок выделения координат и блок формирования команд, дополнительно введены блок обработки изображения и последовательно соединенные счетчик времени, коммутатор, блок памяти и устройство селекции, выход которого соединен с входом блока выделения координат. При этом выход объектива соединен со входом фотоприемника излучения, выход которого соединен со входом блока обработки изображения, выход которого соединен со входами коммутатора и устройства селекции, причем сам фотоприемник излучения выполнен на основе фотоприемника матричного типа. 2 н.п. ф-лы, 2 ил.
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| US 4027837 А, 07.06.1977 | |||
| СТОПОР ДЛЯ ОТСЕЧКИ ШЛАКА В КОНВЕРТЕРЕ | 1998 |
|
RU2148656C1 |
| ВНУТРИМАТОЧНЫЙ КОНТРАЦЕПТИВ | 1992 |
|
RU2049449C1 |
| СПОСОБ СТРЕЛЬБЫ СНАРЯДОМ И СТРЕЛЯЮЩИЙ КОМПЛЕКС | 2001 |
|
RU2210725C2 |

