Предлагаемый способ наведения управляемой ракеты и система наведения для его реализации относятся к области разработки систем управления ракетами и могут быть использованы в противотанковых ракетных комплексах (ПТРК).
Наиболее близким к предлагаемому является способ наведения противотанковой ракеты, реализованный в ПТРК 9К111 "Фагот" и взятый в качестве прототипа [1. Пусковая установка 9П135. Техническое описание. Ордена Трудового Красного Знамени Военное издательство Министерства обороны СССР, Москва, - 1975 г., с.11-13], включающий запуск противотанковой ракеты с бортовым источником излучения, прохождение светового потока от источника излучения через объектив и оптический растр, модуляцию светового потока с помощью оптического растра, прием модулированного светового потока от источника излучения фотоприемником со сплошной фоточувствительной поверхностью, выделение координат бортового источника излучения, определение координат противотанковой ракеты и формирование команд управления противотанковой ракетой.
Наиболее близкой к предлагаемой является система наведения противотанковой ракеты, реализующая известный способ наведения противотанковой ракеты и применяемая в переносном ПТРК 9К111 "Фагот" [1. Пусковая установка 9П135. Техническое описание. Ордена Трудового Красного Знамени Военное издательство Министерства обороны СССР, Москва, - 1975 г., с.11-13]. Эта система наведения содержит последовательно соединенные объектив, принимающий сигнал от бортового источника излучения, оптический растр, фотоприемник излучения, усилитель фототока, блок выделения координат и блок формирования команд, а также генератор опорных напряжений, подключенный между оптическим растром и блоком выделения координат.
Функциональная схема системы наведения противотанковой ракеты, реализующей известный способ наведения противотанковой ракеты, приведена на фиг.1.
Система наведения противотанковой ракеты работает следующим образом. Входным воздействием для нее является угловое отклонение бортового источника излучения противотанковой ракеты от линии прицеливания. Объектив (1), фокусирует излучение фоноцелевой обстановки (ФЦО) с бортовым источником излучения на оптическом растре (2), который имеет прозрачные и непрозрачные сектора, расположенные радиально, и совершает плоскопараллельное перемещение (сканирование), что обеспечивает частотную модуляцию и пространственную селекцию светового потока бортового источника излучения. Частотно-модулированный световой поток воспринимается фотоприемником излучения (3) и преобразуется в соответствующие электрические сигналы. Частотно-модулированный сигнал с фотоприемника поступает в усилитель фототока (4), где усиливается до необходимого значения. Выходной сигнал с усилителя фототока содержит информацию об угловых отклонениях источника излучения ракеты от линии прицеливания, которая поступает в блок выделения координат (5). После преобразования сигнала усилителя фототока блок выделения координат вырабатывает напряжения, соответствующие уже линейным отклонениям ракеты от линии прицеливания. В качестве опорных напряжений при фазовом детектировании используются сигналы с генератора опорных напряжений (7). Напряжения, пропорциональные отклонениям ракеты от линии прицеливания по курсу и тангажу, с выхода блока выделения координат поступают на блок формирования команд (6), где преобразуются в сигналы управления, предназначенные для передачи по ПЛС на ракету.
Современные условия развития ПТРК поставили задачу преодоления ряда принципиальных технических трудностей, свойственных данным способу наведения противотанковой ракеты и системе наведения для его реализации. В первую очередь, это относится к невозможности обеспечения постоянного на всем протяжении полета соотношения сигнал/шум в системе наведения. Это обусловлено тем, что фотоприемник при высоком температурном воздействии генерирует большое количество шумовых электронов, число которых остается постоянным на всем полетном времени ракеты, в то время как световой поток от бортового источника излучения, падающий на входной зрачок ОС, уменьшается обратно пропорционально квадрату дальности до ракеты. Вследствие уменьшения соотношения сигнал/шум существенно снижается точность выделения координат ракеты, при этом ухудшается помехозащищенность и уменьшается чувствительность всей системы управления.
Задачей предлагаемого изобретения является разработка такого способа наведения управляемой ракеты и системы наведения для его реализации, которые позволили бы повысить качество наведения ракеты без изменения конструкции самой ракеты, обеспечить повышение надежности и точности выделения источника полезного сигнала при различных фоноцелевых обстановках на всем протяжении полетного времени управляемой ракеты и хорошую помехозащищенность всей системы управления без ее существенного усложнения.
Поставленная задача решается тем, что в способе наведения управляемой ракеты, включающем старт управляемой ракеты, прием и фокусировку на фотоприемнике светового потока фоноцелевой обстановки, содержащего световой поток фона и световой поток источника полезного сигнала, выделение координат источника полезного сигнала, определение координат управляемой ракеты и формирование команд управления для передачи на ракету, до старта управляемой ракеты назначают коэффициент запаса по полезному сигналу КMIN, после фокусировки светового потока фоноцелевой обстановки формируют видеокадр изображения фоноцелевой обстановки, с каждой ячейки фотоприемника матричного типа снимают выходной сигнал UВЫХ, определяют сигнал, соответствующий среднему значению всех выходных сигналов с ячеек фотоприемника Uф, определяют среднеквадратическое отклонение выходных сигналов ячеек фотоприемника σФ, определяют пороговое значение полезного сигнала UПОР=UФ+КMIN·σФ, и выделяют координаты того изображения, которое образуется на ячейках с уровнем выходного сигнала, удовлетворяющим условию: UВЫХ≥UПОР.
Поставленная задача решается также тем, что в систему наведения управляемой ракеты, содержащую объектив, фотоприемник излучения, последовательно соединенные блок выделения координат и блок формирования команд, дополнительно введены последовательно соединенные блок коэффициентов, анализирующее устройство и блок селекции, причем выход объектива соединен с входом фотоприемника излучения, первый выход которого соединен со вторым входом блока селекции, выход которого подключен к входу блока выделения координат, а второй выход фотоприемника излучения подключен ко второму входу анализирующего устройства, при этом фотоприемник излучения выполнен на основе фотоприемника матричного типа.
Повышение надежности и точности выделения источника полезного сигнала при различных фоноцелевых обстановках на всем протяжении полетного времени управляемой ракеты обеспечивается за счет расчета порогового уровня полезного сигнала по текущему кадру, отражающему реальную фоноцелевую обстановку.
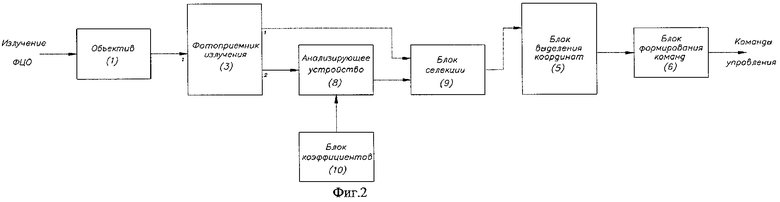
Функциональная схема системы наведения управляемой ракеты, реализующей предлагаемый способ наведения управляемой ракеты, приведена на фиг.2.
Система наведения управляемой ракеты работает следующим образом. Световой поток ФЦО с бортовым источником излучения объектив оптической системы (1) фокусирует непосредственно на фотоприемнике излучения матричного типа (3), на чувствительных ячейках которого образуется изображение ФЦО. Анализирующее устройство (8) определяет сигнал, соответствующий среднему значению всех сигналов с ячеек фотоприемника UФ, на которых образовалось изображения ФЦО, а также среднеквадратическое отклонение (СКО) выходных сигналов ячеек фотоприемника σФ. На основе данных, заложенных в блоке коэффициентов (10), рассчитывается пороговое значение полезного сигнала UПОР=UФ+КMIN·σФ. После этого пороговое значение полезного сигнала передается в блок селекции (9), который осуществляет поиск из всего матричного пространства ячеек, чей уровень выходного сигнала превосходит UПОР, которые и будут соответствовать изображению источника полезного сигнала. На следующем этапе блок выделения координат (5) осуществляет преобразование данных только с выделенных из всего матричного пространства ячеек, которые несут информацию об угловых отклонениях бортового источника излучения управляемой ракеты от линии прицеливания. Напряжения, пропорциональные отклонениям ракеты от линии прицеливания по курсу и тангажу, с выхода блока выделения координат поступают на блок формирования команд (6), где преобразуются в сигналы управления, предназначенные для изменения пространственного положения управляемой ракеты.
В предлагаемой системе наведения управляемой ракеты оптическая система, блок выделения координат и блок формирования команд могут быть выполнены как в прототипе. Фотоприемник излучения может быть выполнен на основе высокочастотной ПЗС-матрицы [2]. Анализирующее устройство, блок коэффициентов и блок селекции могут быть выполнены на основе сигнальных микропроцессоров [3] и программируемых логических интегральных схем [4].
Предлагаемый способ наведения управляемой ракеты и система наведения для его реализации по сравнению с прототипами позволяют достичь:
- постоянно высокого уровня соотношения сигнал/шум на всем протяжении полетной дальности управляемой ракеты;
- обеспечения высокой точности наведения ракеты без существенного усложнения аппаратуры управления;
- повышения помехозащищенности системы управления в целом.
Обосновать работу системы наведения управляемой ракеты можно следующим образом. Расчет порогового значения полезного сигнала UПОР осуществляется по зависимости:

где UФ - величина сигнала, соответствующего среднему значению всех выходных сигналов с ячеек фотоприемника;
KMIN - коэффициент запаса по полезному сигналу;
σФ - СКО выходных сигналов ячеек фотоприемника.
Коэффициент запаса по полезному сигналу КMIN подбирается эмпирически в зависимости от условий боевого применения ПТРК с учетом полетной дальности управляемой ракеты.
Величина сигнала, соответствующая среднему значению всех сигналов с ячеек фотоприемника  , определяется по зависимости:
, определяется по зависимости:

где NY, NZ - число чувствительных ячеек фотоприемника по вертикали и горизонтали соответственно;
 - выходной сигнал с ячейки i-го столбца j-строки.
- выходной сигнал с ячейки i-го столбца j-строки.
СКО выходных сигналов ячеек фото приемника σф, определяется по зависимости:
Анализ зависимостей (1)-(3) показывает, что величина порогового значения полезного сигнала UПОР определяется реальной текущей фоноцелевой обстановкой, позволяет селектировать источник полезного сигнала при различных уровнях светового потока фоноцелевой обстановки и внутренних шумов фотоприемника и, следовательно, повысить надежность и точность выделения источника полезного сигнала при различных фоноцелевых обстановках.
Источники информации
1. Пусковая установка 9П135. Техническое описание. Ордена Трудового Красного Знамени Военное издательство Министерства обороны СССР, Москва, - 1975 г., с.11-13 - прототип.
2. В.Я.Стенин. Применение микросхем с зарядовой связью. "Радио и связь", Москва, 1989.
3. Руководство пользователя по сигнальным микропроцессорам ADSP-2100/Пер. с англ. О.В.Луневой; Под ред. А.Д.Викторова; Санкт-Петербургский государственный электротехнический университет. - Санкт-Петербург, 1997. - 520 с.
4. В.Б.Стешенко. ПЛИС фирмы "ALTERA": Проектирование устройств обработки сигналов./ -М.: "Додека", 2000 г.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2277689C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2282128C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2277688C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2258887C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2290593C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2277690C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2005 |
|
RU2290592C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2004 |
|
RU2260161C1 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2008 |
|
RU2406055C2 |
| СПОСОБ НАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ И СИСТЕМА НАВЕДЕНИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2539728C1 |
Изобретение относится к области разработки систем управления ракетами и может быть использовано в противотанковых ракетных комплексах (ПТРК). Технический результат - повышение качества наведения ракеты без изменения конструкции самой ракеты, обеспечение повышения надежности и точности выделения источника полезного сигнала при различных фоноцелевых обстановках на всем протяжении полетного времени управляемой ракеты и хорошую помехозащищенность всей системы управления без ее существенного усложнения. Поставленная задача решается тем, что в способе наведения управляемой ракеты, включающем старт управляемой ракеты, прием и фокусировку на фотоприемнике светового потока фоноцелевой обстановки, содержащего световой поток фона и световой поток источника полезного сигнала, выделение координат источника полезного сигнала, определяют координаты управляемой ракеты и формируют команды управления для передачи на ракету. До старта управляемой ракеты назначают коэффициент запаса по полезному сигналу KMIN, после фокусировки светового потока фоноцелевой обстановки формируют видеокадр изображения фоноцелевой обстановки, с каждой ячейки фотоприемника матричного типа снимают выходной сигнал, определяют сигнал, соответствующий среднему значению всех выходных сигналов с ячеек фотоприемника, определяют среднеквадратическое отклонение выходных сигналов ячеек фотоприемника, определяют пороговое значение Uпор полезного сигнала по математическому выражению и выделяют координаты того изображения, которое образуется на ячейках с уровнем выходного сигнала, удовлетворяющим условию: UВЫХ≥UПОР. Поставленная задача решается также тем, что в систему наведения управляемой ракеты, содержащую объектив, фотоприемник излучения, последовательно соединенные блок выделения координат и блок формирования команд, дополнительно введены последовательно соединенные блок коэффициентов запаса по полезному сигналу, анализирующее устройство и блок селекции. Причем выход объектива соединен с входом фотоприемника излучения, первый выход которого соединен со вторым входом блока селекции, выход которого подключен к входу блока выделения координат. Второй выход фотоприемника излучения подключен ко второму входу анализирующего устройства, при этом фотоприемник излучения выполнен на основе фотоприемника матричного типа. 2 н.п. ф-лы, 2 ил.
| Разборный с внутренней печью кипятильник | 1922 |
|
SU9A1 |
| Техническое описание | |||
| - М.: Военное издательство, 1975, с.11-13 | |||
| US 4027837 A, 07.06.1977 | |||
| СТОПОР ДЛЯ ОТСЕЧКИ ШЛАКА В КОНВЕРТЕРЕ | 1998 |
|
RU2148656C1 |
| ВНУТРИМАТОЧНЫЙ КОНТРАЦЕПТИВ | 1992 |
|
RU2049449C1 |
| СПОСОБ СТРЕЛЬБЫ СНАРЯДОМ И СТРЕЛЯЮЩИЙ КОМПЛЕКС | 2001 |
|
RU2210725C2 |

