Изобретение относится к области механики, микросистемной техники и наномеханики, в частности к технике устройств на основе материалов с эффектом памяти формы (ЭПФ), и может найти применение в области радиоэлектроники, машиностроения, биотехнологии, электронной микроскопии, медицины.
Известно изобретение «Композитный функциональный материал» (Патент RU №2381903, МПК В32В 15/01; C22F 1/00, опубликовано 20.02.2010 Бюл. №5), который содержит, по крайней мере, два слоя, прочно соединенных друг с другом по плоскости, один из которых выполнен из материала, обладающего обратимой деформацией при изменении внешнего поля в рабочем диапазоне, а второй слой выполнен из упругопластического материала, имеющего предел текучести, находящийся в интервале деформаций композитного функционального материала, возникающих в нем при изменении внешнего поля в рабочем диапазоне. В качестве внешнего поля используют температурное поле, магнитное поле или поле механических напряжений сжатия или растяжения, при этом материал слоев зависит от используемого внешнего поля.
Недостатком данного изобретения является низкая надежность и недолговечность полученного композитного функционального материала, обусловленные тем, что из-за соединения разнородных материалов на границе слоя материала с ЭПФ и упругого слоя в процессе больших изгибных деформаций развиваются значительные механические напряжения, которые приводят к расслоению и потере работоспособности устройства, обуславливают неустойчивость устройства к циклическим нагрузкам.
Известно изобретение «Актюатор, система актюаторов и способ его изготовления» (Патент RU №2305874, МПК Н01Н 61/04, опубликовано 10.09.2007), включающий упругий элемент, преимущественно двумерной конфигурации, и элемент с ЭПФ, прочно механически соединенные друг с другом плоской стороной, причем элемент с ЭПФ имеет одностороннюю деформацию растяжения или сжатия. Система актюаторов выполнена в виде множества актюаторов, соединенных параллельно. Способ изготовления актюатора включает операции изготовления упругого элемента, операцию изготовления элемента с ЭПФ и операцию механически прочного соединения элементов между собой плоскими сторонами. Перед операцией механически прочного соединения элементов с плоскими сторонами элемент с памятью формы тренируют на односторонний ЭПФ до достижения односторонней деформации растяжения или сжатия, а операцию механически прочного соединения элементов проводят при значениях внешних параметров и внешнего поля, отвечающих мартенситному состоянию элемента с памятью формы.
Недостатками данного изобретения являются низкое быстродействие, сложность применения для управления микроустройством, низкая надежность и недолговечность полученного композитного функционального материала из-за соединения разнородных материалов.
Известно изобретение «Термоэлектромеханический преобразователь для микроманипулятора (варианты)» (Патент RU №2259914, МПК 7 B25J 7/00, опубликовано 10.09.2005), в котором преобразователь на основе деформируемого стержня содержит размещенные внутри стержня спиральный электрический нагреватель и пружину изгиба, на концах которой выполнены крепежные приспособления для связывания звеньев микроманипулятора, а также нижний и верхний ряды термоэлектрических модулей на основе эффекта Пельтье (элементов Пельтье), закрепленных на противоположных поверхностях деформируемого стержня с возможностью вращения. Деформируемый стержень выполнен из материала с ЭПФ. При исключении спирального электрического нагревателя деформируемый стрежень выполнен из электропроводникового материала с ЭПФ.
Недостатками изобретения являются выполнение его конструкции громоздкой, сложной в управление, имеющей низкое быстродействие, что делает невозможным его использование для управления микроустройством.
Наиболее близким к заявляемому техническому решению, т.е. прототипом, является изобретение «Микромеханическое устройство, способ его изготовления и система манипулирования микро- и нанообъектами» (Патент RU №2458002, МПК В81В 3/00; F03G 7/06, опубликовано 10.08.2012), в котором микромеханическое устройство содержит два плоских элемента, по крайней мере, один из которых выполнен термочувствительным и состоящим из двух прочно соединенных между собой слоев, из которых один изготовлен из сплава с ЭПФ с псевдопластической деформацией растяжения, а другой - из упругого материала. Плоские элементы соединены с одного конца, с другого конца сформирован захват для удержания объекта манипулирования. При изготовлении устройства предварительно изготовляют слой сплава с ЭПФ и вносят в него псевдопластическую деформацию растяжения, а затем соединяют его с упругим слоем, причем соединение слоев производят при температуре ниже температуры мартенситного превращения в сплаве с ЭПФ. Система манипулирования микрообъектами состоит из микромеханического устройства, закрепленного на конце микропроволоки нанопозиционера, рабочего поля с манипулируемым объектом и источника подогрева в виде полупроводникового лазера, излучение которого сфокусировано на рабочее поле системы манипулирования, включая конец микропроволоки с микропинцетом.
Недостатками данного изобретения является:
- низкая надежность и недолговечность микромеханического устройства, обусловленные тем, что из-за механического соединения разнородных материалов на границе слоя материала с ЭПФ и упругого слоя в процессе циклической работы микромеханического устройства при больших изгибных деформациях развиваются значительные механические напряжения, которые приводят к расслоению слоистого композита и быстрой потере работоспособности устройства;
- низкое быстродействие устройства из-за того, что охлаждение микромеханического устройства (после срабатывания при нагреве) происходит естественным способом, что занимает значительное время в обычных условиях при комнатной температуре, а в условиях высокого вакуума, например, в камере электронного или ионного микроскопа при манипулировании микро- и нанообъектами, это время может возрастать в несколько раз, что приводит к существенному снижению быстродействия устройства и ограничению его функциональных возможностей;
- невозможность длительного удержания и хранения отдельных микро- и нанообъектов без затрат дополнительной энергии.
Технический результат заключается в повышении быстродействия, надежности, срока службы и расширения функциональных возможностей, в том числе, реализации функции хранения микро- и нанообъектов, устройства для манипулирования микро- и нанообъектами.
Технический результат достигается созданием устройства для манипулирования микро- и нанообъектами с функцией хранения, включающего микромеханический актюатор с системой подогрева, причем актюатор содержит неподвижный и подвижный плоские элементы, расположенные вдоль его оси, подвижный элемент выполнен термочувствительным, состоящим из двух слоев, причем один из слоев изготовлен из сплава с эффектом памяти формы, а другой - из упругого материала, при этом оба элемента соединены с одного конца актюатора, а с другого конца сформирован захват для удержания микро- или нанообъектов, микромеханический актюатор выполнен за счет изготовления протяженного сквозного отверстия в слоистом композиционном материале с обратимым эффектом памяти формы, включающем кристаллический и аморфный слои с их сплошным неразрывным соединением на границе между ними и одинаковым химическим составом по обе стороны границы, таким образом, что неподвижный элемент выполнен аморфным, а подвижный термочувствительный элемент - аморфно-кристаллическим с кристаллическим слоем на внешней стороне актюатора, причем кристаллический слой обладает памятью формы и является псевдопластически растянутым, а аморфный слой является упругим, при этом оба элемента выполнены с возможностью увеличения зазора захвата до максимального значения при увеличении температуры в интервале мартенситного превращения в кристаллическом слое и уменьшения зазора захвата до минимального значения при уменьшении температуры в интервале мартенситного превращения в кристаллическом слое; система подогрева представляет собой модуль температурного контроля, включающий контроллер, консоль с контактами, по меньшей мере, один элемент Пельтье, термистор, теплопроводящую пластину, коннектор, выполненный с возможностью установки устройства на микро- или наноманипулятор, на коннекторе одним концом закреплена консоль с контактами, а на другом ее конце размещен элемент Пельтье, на противоположной стороне которого расположена теплопроводящая пластина с закрепленными на ней термистором и микромеханическим актюатором, а контроллер через контакты на консоли электрически соединен с элементом Пельтье и термистором.
В частном случае модуль температурного контроля выполнен с возможностью двунаправленного пропорционально-интегрально-дифференциального регулирования.
Предлагается также способ изготовления микромеханического актюатора, в котором сверхбыстрой закалкой из расплава получают слоистый композиционный материал с обратимым эффектом памяти формы в виде ленты, включающий кристаллический и аморфный слои с их сплошным неразрывным соединением на границе между ними и одинаковым химическим составом по обе стороны границы, при этом в аморфном слое композиционного материала делают протяженное сквозное отверстие вдоль ленты параллельно границе между слоями и формируют подвижный и неподвижный элементы актюатора таким образом, что с одного конца актюатора оставляют оба элемента соединенными, а с другого конца актюатора создают захват для удержания микро- или нанообъектов путем разъединения элементов прорезью на расстояние, которое соответствует минимальному размеру захватываемого объекта, при этом положение и ширину прорези выбирают достаточными для получения неподвижного элемента аморфным, а подвижного элемента - аморфно-кристаллическим термочувствительным, обладающим обратимым эффектом памяти формы, с возможностью обратимо изменять величину зазора захвата при изменении температуры в интервале мартенситного превращения в кристаллическом слое, причем путем варьирования положения и ширины прорези изменяют также соотношение толщин аморфного и кристаллического слоев в термочувствительном подвижном элементе, которое определяет максимальный зазор захвата при нагреве термочувствительного элемента выше температуры конца обратного мартенситного превращения в кристаллическом слое и, соответственно, максимальный размер захватываемого объекта.
В частном случае для изготовления микромеханического актюатора выбирают сплавы квазибинарной системы TiNi-TiCu с содержанием меди от 17 до 34 ат. %.
Кроме того, формирование захвата выполняют методом селективного ионного травления.
Повышение надежности и срока службы предложенного устройства для манипулирования микро- и нанообъектами достигается за счет повышения стабильности и долговечности работы микромеханического актюатора, изготовленного с применением слоистого композиционного материала с обратимым ЭПФ, который получают в одном технологическом процессе, формируя аморфный и кристаллический слои с неразрывным соединением структурных фаз на их границе, поэтому в отличие от прототипа термочувствительный подвижный элемент актюатора представляет собой слоистый аморфно-кристаллический композит без механического соединения слоев и сплошной материал одного химического состава.
При нагреве микромеханического актюатора происходит увеличение зазора захвата до максимального значения, а при охлаждении - уменьшение зазора захвата до минимального значения, поэтому устройство способно захватывать малые объекты, у которых хотя бы один из размеров превышает минимальную величину зазора захвата, например, нанообъекты (углеродная нанотрубка, графеновый лист, вискер и т.п.), и удерживать их неограниченное время без приложения дополнительной энергии, реализуя функцию хранения микро- и нанообъектов.
В свою очередь управление актюатором с помощью модуля температурного контроля на основе элементов Пельтье позволяет поддерживать заданную температуру или отрабатывать заданный режим нагрева и охлаждения во времени с высокой точностью и скоростью, обеспечивая повышение быстродействия устройства по сравнению с прототипом.
Таким образом, все вышесказанное в совокупности расширяет функциональные возможности устройства для манипулирования микро- и нанообъектами, что увеличивает эффективность его применения в различных областях техники и медицины.
Заявленное изобретение поясняется следующими рисунками.
Фиг. 1 - показано устройство для манипулирования микро- и нанообъектами.
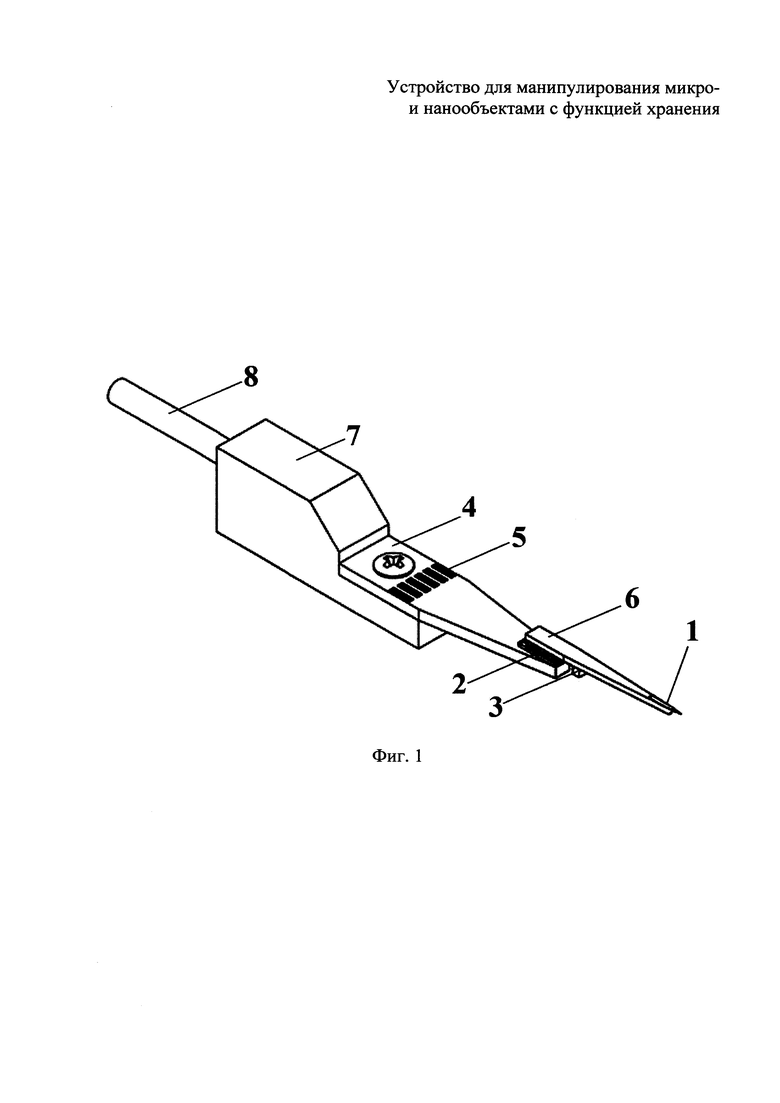
Фиг. 2 - показан микромеханический актюатор для захвата микро- и нанообъектов (микропинцет) в исходном (а, в) и нагретом (б, г) состояниях.
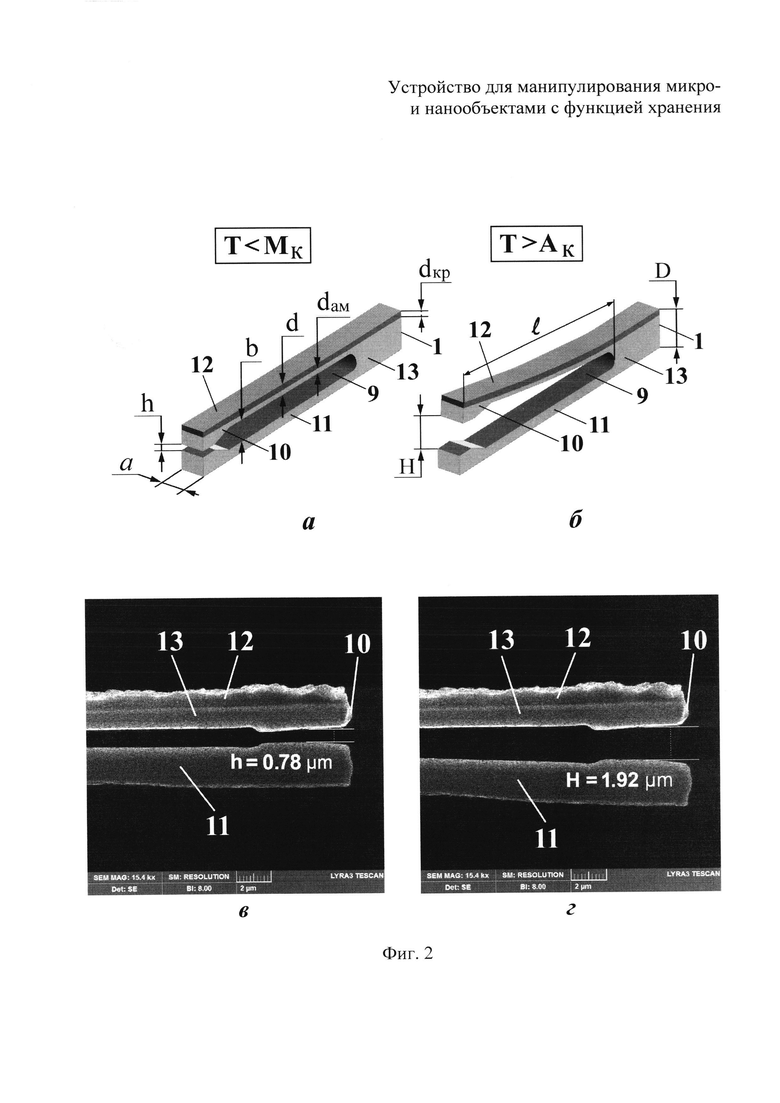
Фиг. 3 - показано изображение типичного поперечного сечения аморфно-кристаллического композиционного материала в виде ленты (а) и схема установки для получения аморфно-кристаллических лент из сплава с ЭПФ методом быстрой закалки из расплава (б).
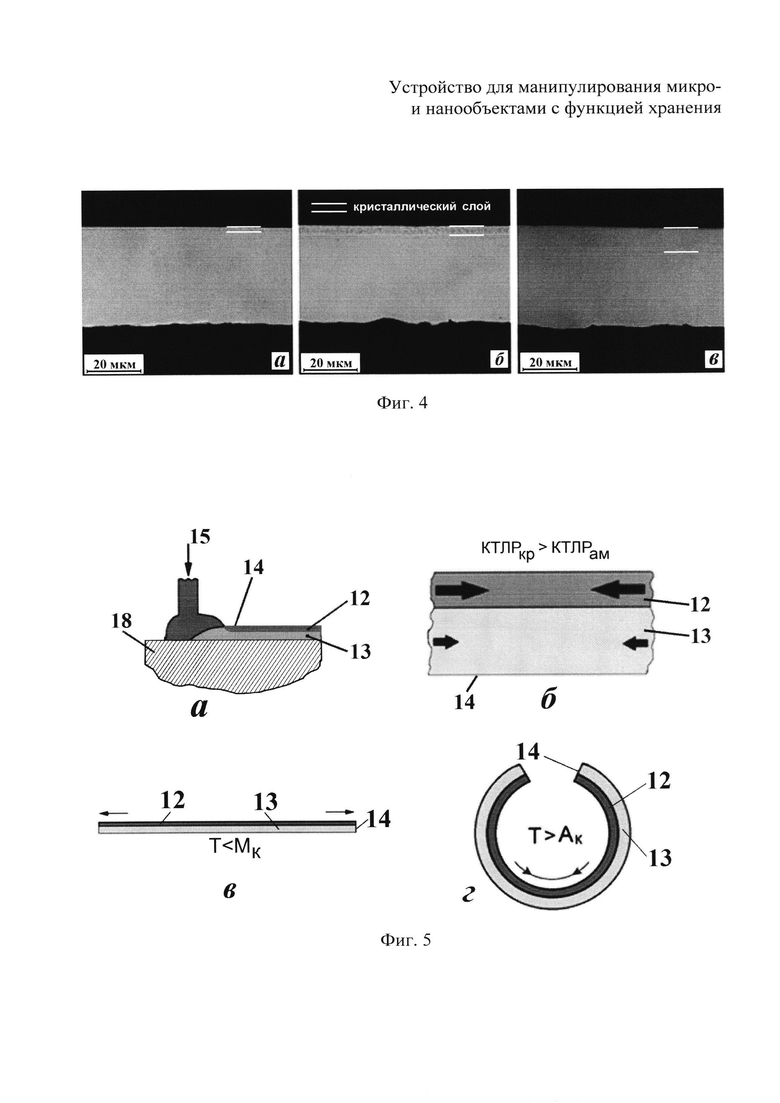
Фиг. 4 - показаны изображения поперечного сечения быстрозакаленных аморфно-кристаллических лент из сплава Ti50Ni50Cu25, полученных при скоростях охлаждения 9⋅105 К/с (а), 7⋅105 К/с (б), 5⋅105 К/с (в).
Фиг. 5 - показано схематическое изображение процесса получения быстрозакаленного слоистого аморфно-кристаллического композита (а, б) и его формоизменения при термоциклировании в интервале мартенситного превращения (в, г).
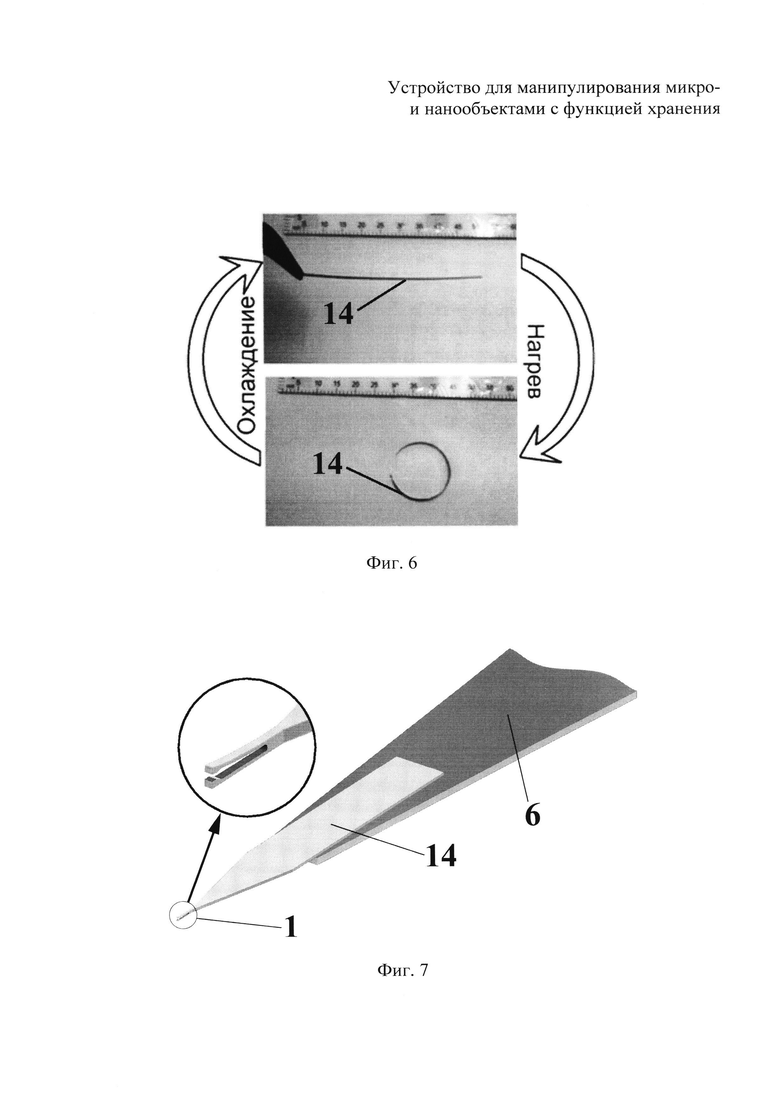
Фиг. 6 - показан пример обратимого изменения формы отрезка быстрозакаленной аморфно-кристаллической ленты из сплава Ti50Ni50Cu25 в цикле нагрев-охлаждение.
Фиг. 7 - показан пример микромеханического актюатора, изготовленного на конце отрезка ленты из сплава с обратимым ЭПФ.
Фиг. 8 - показан пример микромеханического актюатора, закрепленного на конически заостренном конце микропроволоки.
Ниже приведен пример конкретной реализации устройства. Устройство для манипулирования микро- и нанообъектами с функцией хранения (Фиг. 1) содержит микромеханический актюатор 1 и систему подогрева, представляющую модуль температурного контроля, включающий контроллер (не показан), по меньшей мере один элемент Пельтье 2, термистор 3, консоль 4 с контактами 5, теплопроводящую пластину 6, коннектор 7, выполненный с возможностью установки устройства на микро- или наноманипулятор с помощью выступающей части 8, на коннекторе 7 одним концом закреплена консоль 4 с контактами 5, а на другом ее конце размещен элемент Пельтье 2, на противоположной стороне которого расположена теплопроводящая пластина 6 с закрепленными на ней термистором 3 и микромеханическим актюатором 1, а контроллер через контакты 5 на консоли 4 электрически соединен с элементом Пельтье 2 и термистором 3.
В устройстве для манипулирования микро- и нанообъектами с функцией хранения (Фиг. 1) микромеханический актюатор (микропинцет) 1 закрепляют на теплопроводящей пластине 6, сделанной, например, из серебра. Теплопроводящая пластина 6 расположена на элементе Пельтье 2, состоящем из одной или более пар миниатюрных полупроводниковых параллелепипедов - одного n-типа и одного p-типа в паре (например, теллурида висмута Bi2Te3 и германида кремния), которые попарно соединены при помощи металлических перемычек, например, ТЕ-12-0.45-1.3, который ее нагревает или охлаждает. Термистор 3, например, NCP03XV103, измеряет температуру на теплопроводящей пластине 6. Элемент Пельтье 2, термистор 3 и теплопроводящая пластина 6 расположены на консоли 4, выполненной из диэлектрического материала с высокой теплопроводностью, например, из нитрида алюминия, с нанесенными на нее, например, напылением, металлическими контактами 5. Консоль 4 закреплена на коннекторе 7, выполненным с возможностью соединения с манипулятором 3D-перемещения (не показан) и служащим теплопроводом для отвода/подвода тепла. Коннектор 7 снабжен выступающей частью 8, например, цилиндрической формы диаметром 0,5 мм и длиной 35-50 мм, для закрепления устройства на микро- или наноманипулятор, например, Omniprobe, Kleindiek или SmarAct MCS-3D. Устройство, закрепленное на микро- или наноманипуляторе, способно перемещать в пространстве захваченный объект. Выбранный (заданный) режим нагрева и охлаждения устройства осуществляют с помощью модуля температурного контроля.
Модуль температурного контроля содержит контроллер, например, контроллер DX5100, который представляет собой прецизионное программируемое устройство управления термоэлектрическими модулями (элементами Пельтье). В контроллере реализовано двунаправленное (нагрев и охлаждение) ПИД (пропорционально-интегрально-дифференциальное) регулирование. Контроллер позволяет поддерживать заданную температуру модуля с высокой точностью или отрабатывать заданную программу нагрева и охлаждения во времени с высокой скоростью. В контроллер введена функция диагностики объекта регулирования, которая включает измерение сопротивления объекта на переменном токе, термоэлектрической добротности и постоянной времени. Реализована функция автоподстройки параметров ПИД регулятора. Управление контроллером, который в свою очередь подает команду нагрева или охлаждения теплопроводящей пластины 6, осуществляется с помощью программного обеспечения, например, программы DX5100 Vision.
Устройство работает следующим образом.
В исходном состоянии ниже температуры конца прямого мартенситного превращения Мк микромеханический актюатор 1 (микропинцет) выполнен с зазором h между термочувствительным подвижным элементом 10 и неподвижным элементом 11, величина которого определяет минимальный размер захватываемого объекта (Фиг. 2а, в). Технология ФИП позволяет выполнить разрез с минимальной шириной до 2-4 нм. При подаче управляющего сигнала с контроллера на элемент Пельтье 2 через контакты 5 на консоли 4 (Фиг. 1), приводящего к нагреву выше температуры конца обратного мартенситного превращения Ак теплопроводящей пластины 6 с закрепленными на ней термистором 3 и микромеханическим актюатором 1, подвижный элемент 10 (кантилевер) изгибается, увеличивая зазор захвата до величины Н (Фиг. 2б, г), которая определяет максимальный размер захватываемого объекта. Далее модуль температурного контроля на основе элементов Пельтье поддерживает с точностью ±0,5°С заданную температуру актюатора 1, обеспечивая максимальную величину Н зазора захвата до момента помещения захватываемого объекта между подвижным элементом 10 и неподвижным элементом 11. При подаче управляющего сигнала с контроллера на элемент Пельтье 2, приводящего к охлаждению теплопроводящей пластины 6 ниже температуры Мк, актюатор 1 возвращается в исходное состояние (Фиг. 2а) за счет реализации обратимого ЭПФ, захватывая объект, расположенный между подвижным элементом 10 и неподвижным элементом 11 актюатора 1. Повторный нагрев актюатора 1 выше температуры Ак приведет вновь к увеличению зазора захвата до величины Н и освобождению объекта. Таким образом, устройство способно захватывать малые объекты, у которых хотя бы один из размеров превышает величину h, например, нанообъекты (углеродная нанотрубка, графеновый лист, вискер и т.п.), удерживать их неограниченное время без приложения дополнительной энергии, если не допускать нагрева окружающей среды выше температуры начала обратного мартенситного превращения Ан, перемещать в пространстве захваченные объекты при закреплении устройства на микро- или наноманипуляторе и освобождать объекты после доставки их к месту исследования или использования. Таким образом, устройство выполняет полный технологический цикл: выбор микро- или нанообъекта - захват с помощью микромеханического актюатора (микропинцета) - 3D-перемещение микроманипулятором - освобождение. Кроме того, микромеханический актюатор (микропинцет), закрепленный на любом держателе, например, на игле наноманипулятора, может быть использован для длительного хранения отдельных микро- и нанообъектов без затрат дополнительной энергии.
Далее приведен пример конкретной реализации способа изготовления микромеханического актюатора 1 (Фиг. 2), Предложенный способ включает в себя получение сверхбыстрой закалкой из расплава слоистого композиционного материала 14 с обратимым ЭПФ в виде ленты (Фиг. 3а), содержащего кристаллический 12 и аморфный 13 слои с их сплошным неразрывным соединением на границе между ними и одинаковым химическим составом по обе стороны границы. Получение материала 14 заключается в разливке струи расплава из тигля на цилиндрическую поверхность закалочного медного диска, вращающегося относительно горизонтальной оси (Фиг. 3б). Расплав 15, полученный в тигле 16 с помощью нагревания слитка сплава высокочастотным индуктором 17, выпускается на закалочный медный диск 18 путем подачи избыточного давления инертного газа, например, гелия, в тигель и затвердевает в виде ленты 14. Охлаждение расплава осуществляют со скоростью V, определяющей соотношение толщин аморфного и кристаллического слоев 13, 12, при этом изменение скорости охлаждения расплава V осуществляют путем варьирования скорости вращения закалочного медного диска V0, задавая и контролируя технологические параметры процесса закалки расплава, например, размер и форму выливного отверстия в тигле, температуру расплава, расстояние между местом излива расплава из тигля и закалочным диском, величину избыточного давления для выдавливания расплава из тигля. Скорость вращения V0 изменяют, например, в интервале 1000-2000 оборотов/мин. Скорость охлаждения оценивают по выражению: V≅2π⋅R⋅V0⋅(Tm-Tg)/L, где Tm и Tg - температуры плавления и стеклования; R - радиус закалочного диска; L - размер зоны столкновения струи расплава с поверхностью барабана. Температуру расплава в момент разливки из тигля выставляют, например, 1150°С. Ширину ленты варьируют, например, в диапазоне 1-20 мм, длину ленты - до нескольких десятков метров. Для изготовления материала используют сплав с высокой склонностью к аморфизации, например, сплавы квазибинарной системы TiNi-TiCu с содержанием меди от 17 до 34 ат. %. Слитки из сплавов Ti-Ni-Cu изготавливают в дуговой печи с шестикратной переплавкой в атмосфере аргона в поле токов высокой частоты. Для изготовления слитков используют чистые материалы, например, электродный никель (Ni Н0), бескислородная медь (Cu М0), йодидный титан (чистота 99,999).
При закалке из жидкого состояния с высокими скоростями охлаждения расплава (более 106 К/с) сплав, например, Ti50Ni50Cu25, получают в виде тонкой ленты (20-50 мкм) в аморфном состоянии, однако из-за различия в скоростях закалки на поверхности ленты, контактирующей с закалочным диском-холодильником, и в объеме ленты, при более низких скоростях охлаждения расплава, например, (105÷106 К/с), на неконтактной (свободной) поверхности ленты образуется поверхностный кристаллический слой 12, т.е. такая лента представляет собой слоистый аморфно-кристаллический композит 14 (Фиг. 3а). В зависимости от скорости охлаждения расплава V, которую устанавливают путем подбора скорости вращения V0 медного диска 18, соотношение толщин аморфного 13 и кристаллического слоев 12 варьируется. В частности, снижение V от 9⋅105 до 5⋅105 К/с приводит к увеличению толщины кристаллического слоя dкр от 0,4 до 10 мкм при практически неизменной толщине ленты (Фиг. 4).
Аморфно-кристаллический композит 14 проявляет обратимый ЭПФ на изгиб, что поясняется следующим образом. В процессе его изготовления часть расплава 15 при попадании на закалочный медный диск 18 затвердевает с образованием аморфной фазы 13, тогда как другая часть расплава затвердевает не на поверхности закалочного диска 18, а на уже образовавшемся аморфном слое 13 (Фиг. 5а). При этом скорость охлаждения внешнего (неконтактного) слоя снижается, что при затвердевании приводит к формированию в этом слое кристаллической структуры 12. Дальнейшее охлаждение кристаллического слоя 12 должно было бы привести к его сокращению из-за процесса термического сжатия, однако аморфный слой 13, имеющий меньший коэффициент термического линейного расширения (КТЛР), более высокую прочность и большую толщину, препятствует этому процессу (Фиг. 56). В результате при охлаждении до комнатной температуры кристаллический слой 12 оказывается псевдопластически растянутым (Фиг. 5в). Если такой композит нагреть выше температуры Ан в материале кристаллического слоя 12, то за счет реализации ЭПФ кристаллический слой 12 будет стремиться к сжатию, что приведет к изгибу композита подобно биметаллической пластине (Фиг. 5г). При охлаждении ниже температуры Мк за счет упругости аморфного слоя 13 композит 14 возвращается в исходное состояние (Фиг. 5в).
Таким образом, слоистый композиционный материал 14 обладает обратимой памятью формы на изгиб (Фиг. 6), обусловленной протеканием термоупругих мартенситных превращений в кристаллическом слое 12 и контрсилы от упругого аморфного слоя 13, причем такой материал не требует какой-либо дополнительной обработки, что упрощает процесс его изготовления и повышает стабильность работы материала при проявлении обратимого ЭПФ.
Для формирования подвижного 10 и неподвижного 11 элементов актюатора 1 (Фиг. 2) в аморфном слое 13 композиционного материала 14 делают протяженное сквозное отверстие 9 вдоль ленты параллельно границе между слоями 12, 13 таким образом, что с одного конца актюатора 1 оставляют оба элемента 10, 11 соединенными, а с другого конца актюатора создают захват для удержания микро- или нанообъектов путем разъединения элементов 10, 11 прорезью 9 на расстояние h, которое соответствует минимальному размеру захватываемого объекта. При этом положение и ширину прорези 9 выбирают достаточными для получения неподвижного элемента 11 аморфным, а подвижного элемента 10 - аморфно-кристаллическим термочувствительным с кристаллическим слоем 12 на внешней стороне актюатора, причем кристаллический слой 12 обладает памятью формы и является псевдопластически растянутым, а аморфный слой является упругим. В результате формируют подвижный элемент 10 с возможностью увеличения зазора захвата до максимального значения Н при увеличении температуры в интервале мартенситного превращения в кристаллическом слое 12 и уменьшения зазора захвата до минимального значения h при уменьшении температуры в интервале мартенситного превращения в кристаллическом слое 12. Путем варьирования положения и ширины прорези 9 изменяют также соотношение толщин аморфного и кристаллического слоев (dам, и dкр, соответственно) в термочувствительном подвижном элементе 10, которое определяет максимальный зазор захвата Н при нагреве термочувствительного элемента 10 выше температуры Ак в кристаллическом слое 12 и, соответственно, максимальный размер захватываемого объекта.
На Фиг. 2в, г показан пример конкретного выполнения микромеханического актюатора 1, изготовленного методом селективного ионного травления с помощью технологии фокусированных ионных пучков (ФИП) из аморфно-кристаллической ленты 14 толщиной около 4,5 мкм, в исходном «холодном» (ниже температуры Мк) состоянии (Фиг. 2в) и в «горячем» (выше температуры Ак) состоянии после нагрева (Фиг. 2г).
Толщины аморфного dам, и кристаллического dкр слоев в подвижном элементе (кантилевере) 10, а также их соотношение варьируют:
1) выбором состава композиционного материала 14 и скоростью охлаждения расплава V;
2) расположением и размерами отверстия 9, сделанного в материале 14;
3) уменьшением толщин аморфного 13 и кристаллического 12 слоев одновременно или по отдельности, например, с помощью химического или электрохимического травления.
В данном примере конкретного исполнения микромеханического актюатора 1 (микропинцета) из слоистого композиционного материала 14 с обратимым ЭПФ, изготовленного из сплава Ti50Ni25Cu25 сверхбыстрой закалкой из расплава, приведены характерные размеры данного устройства (Фиг. 2):
- толщина кристаллического слоя в кантилевере 10: dкр=0,8 мкм;
- толщина аморфного слоя в кантилевере 10: dам=1,1 мкм;
- общая толщина кантилевера 10: d=dкр+dам=1,9 мкм;
- длина кантилевера 10: 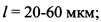
- ширина отверстия 9: b=0,9 мкм:
- общая толщина актюатора 1: D=4,4 мкм;
- ширина актюатора 1: а=3-5 мкм;
- максимальная ширина зазора варьируется в диапазоне: H=1-5 мкм;
- минимальная ширина зазора варьируется в диапазоне: h=5-1000 нм.
При такой конфигурации устройство для манипулирования микро- и нанообъектами способно захватывать и хранить микро- и нанообъекты размером в диапазоне от 5 нм до 5 мкм, а при закреплении на микро- или наноманипуляторе перемещать в пространстве захваченный объект.
Время срабатывания (быстродействие) устройства для манипулирования микро- и нанообъектами определяется быстродействием микромеханического актюатора (микропинцета) и температурными режимами, устанавливаемыми на модуле температурного контроля в зависимости от конкретного применения устройства. В примере конкретного исполнения устройства (Фиг. 2в, г) увеличение зазора захвата до величины H=1,92 мкм при нагреве микропинцета и уменьшение зазора захвата до величины h=0,78 мкм при охлаждении микропинцета происходило за одинаковое время 800 мс.
Для упрощения процесса закрепления микромеханического актюатора 1 на теплопроводящей пластине 6, актюатор 1 (микропинцет) формируют, например, методом селективного ионного травления с помощью технологии фокусированных ионных пучков (ФИП), на конце отрезка аморфно-кристаллической ленты 14 из сплава с ЭПФ (Фиг. 7). В другом частном случае, например, с помощью технологии химического осаждения из паровой фазы (CVD) в аппарате ФИП, актюатор 1 закрепляют, например, вольфрамом или платиной 19, к конически заостренному, например, до 5 мкм, концу микропроволоки 20, например, диаметром 500 мкм, с высокой теплопроводностью, например, из металла (меди или вольфрама) или керамики (Фиг. 8).
Таким образом, по сравнению с прототипом предлагаемое устройство для манипулирования микро- и нанообъектами с функцией хранения и способ изготовления микромеханического актюатора существенно повышают надежность и срок службы изделия за счет выполнения термочувствительного подвижного элемента актюатора в виде аморфно-кристаллического композита, представляющего собой сплошной материал одного химического состава без механического соединения слоев. Устройство способно захватывать малые объекты, например, нанообъекты (углеродная нанотрубка, графеновый лист, вискер и т.п.), и удерживать их неограниченное время без приложения дополнительной энергии, реализуя функцию хранения микро- и нанообъектов. Управление актюатором (микропинцетом) посредством модуля температурного контроля на основе элементов Пельтье позволяет поддерживать заданную температуру или отрабатывать заданный режим нагрева и охлаждения во времени с высокой точностью и скоростью. Все вышесказанное обеспечивает повышение устойчивости к циклическим нагрузкам, надежности и быстродействия изделия, расширяет его функциональные возможности по сравнению с прототипом, что имеет определяющее значение для таких современных областей техники как микро- и наномеханика (МЭМС и НЭМС), робототехника, энергетика, приборостроение, авиационные и космические технологии, биомедицина и биоинженерия.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ МАНИПУЛИРОВАНИЯ МИКРО- И НАНООБЪЕКТАМИ | 2018 |
|
RU2713527C2 |
| МИКРОМЕХАНИЧЕСКОЕ УСТРОЙСТВО, СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ И СИСТЕМА МАНИПУЛИРОВАНИЯ МИКРО- И НАНООБЪЕКТАМИ | 2010 |
|
RU2458002C2 |
| УСТРОЙСТВО ДЛЯ МАНИПУЛИРОВАНИЯ МИКРО- И НАНООБЪЕКТАМИ, СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ И СИСТЕМА УПРАВЛЕНИЯ | 2018 |
|
RU2698570C1 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ФУНКЦИОНАЛЬНОГО МАТЕРИАЛА С ОБРАТИМОЙ ПАМЯТЬЮ ФОРМЫ ИЗ КВАЗИБИНАРНОГО СПЛАВА ИНТЕРМЕТАЛЛИЧЕСКОЙ СИСТЕМЫ TiNi-TiCu (ВАРИАНТЫ) | 2016 |
|
RU2692711C1 |
| СИСТЕМА УПРАВЛЕНИЯ УСТРОЙСТВОМ С ЭФФЕКТОМ ПАМЯТИ ФОРМЫ ДЛЯ МАНИПУЛИРОВАНИЯ МИКРО- И НАНООБЪЕКТАМИ | 2021 |
|
RU2778525C1 |
| Система управления устройством с эффектом памяти формы для манипулирования микро- и нанообъектами | 2022 |
|
RU2790934C1 |
| ТЕРМОЧУВСТВИТЕЛЬНЫЙ ПРИВОДНОЙ ЭЛЕМЕНТ | 2015 |
|
RU2617841C1 |
| ВОЛОКОННО-ОПТИЧЕСКИЙ ТЕРМОДАТЧИК | 2010 |
|
RU2441205C1 |
| МИКРОСИСТЕМНЫЙ ЗАХВАТ | 2015 |
|
RU2598416C1 |
| АКТЮАТОР НА ОСНОВЕ ФУНКЦИОНАЛЬНОГО МАТЕРИАЛА | 2013 |
|
RU2539605C2 |

Изобретение относится к области механики, микросистемной техники и наномеханики, в частности к технике устройств на основе материалов с эффектом памяти формы (ЭПФ), и может найти применение в области радиоэлектроники, машиностроения, биотехнологии, электронной микроскопии, медицины. Устройство для манипулирования микро- и нанообъектами с функцией хранения включает микромеханический актюатор с системой подогрева, причем актюатор содержит неподвижный и подвижный плоские элементы, расположенные вдоль его оси, подвижный элемент выполнен термочувствительным, состоящим из двух слоев, причем один из слоев изготовлен из сплава с эффектом памяти формы, а другой - из упругого материала, при этом оба элемента соединены с одного конца актюатора, а с другого конца сформирован захват для удержания микро- или нанообъектов. Устройство отличается тем, что микромеханический актюатор выполнен за счет изготовления протяженного сквозного отверстия в слоистом композиционном материале с обратимым эффектом памяти формы, материал включает кристаллический и аморфный слои с их сплошным неразрывным соединением на границе между ними и одинаковым химическим составом по обе стороны границы, таким образом, что неподвижный элемент выполнен аморфным, а подвижный термочувствительный элемент - аморфно-кристаллическим с кристаллическим слоем на внешней стороне актюатора, причем кристаллический слой обладает памятью формы и является псевдопластически растянутым, а аморфный слой является упругим, при этом оба элемента выполнены с возможностью увеличения зазора захвата до максимального значения при увеличении температуры в интервале мартенситного превращения в кристаллическом слое и уменьшения зазора захвата до минимального значения при уменьшении температуры в интервале мартенситного превращения в кристаллическом слое; система подогрева представляет собой модуль температурного контроля, включающий контроллер, консоль с контактами, по меньшей мере один элемент Пельтье, термистор, теплопроводящую пластину, коннектор, выполненный с возможностью установки устройства на микро- или наноманипулятор, на коннекторе одним концом закреплена консоль с контактами, а на другом ее конце размещен элемент Пельтье, на противоположной стороне которого расположена теплопроводящая пластина с закрепленными на ней термистором и микромеханическим актюатором, а контроллер через контакты на консоли электрически соединен с элементом Пельтье и термистором. Заявлен способ изготовления микромеханического актюатора. Технический результат - устройство повышает надежность и срок службы изделия за счет использования сплошного композита из одного материала без механического соединения слоев, устройство позволяет решать задачи для нанообъектов, позволяет удерживать объекты неограниченное время без приложения дополнительной энергии, реализуя функцию хранения микро- и нанообъектов, использование температурного контроля позволяет поддерживать заданную температуру или отрабатывать заданный режим нагрева и охлаждения во времени с высокой точностью и скоростью. Все вышесказанное обеспечивает расширение функциональных возможностей изделия. 2 н. и 3 з.п. ф-лы, 8 ил.
1. Устройство для манипулирования микро- и нанообъектами с функцией хранения, включающее микромеханический актюатор с системой подогрева, причем актюатор содержит неподвижный и подвижный плоские элементы, расположенные вдоль его оси, подвижный элемент выполнен термочувствительным, состоящим из двух слоев, причем один из слоев изготовлен из сплава с эффектом памяти формы, а другой - из упругого материала, при этом оба элемента соединены с одного конца актюатора, а с другого конца сформирован захват для удержания микро- или нанообъектов, отличающееся тем, что микромеханический актюатор выполнен за счет изготовления протяженного сквозного отверстия в слоистом композиционном материале с обратимым эффектом памяти формы, включающем кристаллический и аморфный слои с их сплошным неразрывным соединением на границе между ними и одинаковым химическим составом по обе стороны границы, таким образом, что неподвижный элемент выполнен аморфным, а подвижный термочувствительный элемент - аморфно-кристаллическим с кристаллическим слоем на внешней стороне актюатора, причем кристаллический слой обладает памятью формы и является псевдопластически растянутым, а аморфный слой является упругим, при этом оба элемента выполнены с возможностью увеличения зазора захвата до максимального значения при увеличении температуры в интервале мартенситного превращения в кристаллическом слое и уменьшения зазора захвата до минимального значения при уменьшении температуры в интервале мартенситного превращения в кристаллическом слое; система подогрева представляет собой модуль температурного контроля, включающий контроллер, консоль с контактами, по меньшей мере один элемент Пельтье, термистор, теплопроводящую пластину, коннектор, выполненный с возможностью установки устройства на микро- или наноманипулятор, на коннекторе одним концом закреплена консоль с контактами, а на другом ее конце размещен элемент Пельтье, на противоположной стороне которого расположена теплопроводящая пластина с закрепленными на ней термистором и микромеханическим актюатором, а контроллер через контакты на консоли электрически соединен с элементом Пельтье и термистором.
2. Устройство по п. 1, отличающееся тем, что модуль температурного контроля выполнен с возможностью двунаправленного пропорционально-интегрально-дифференциального регулирования.
3. Способ изготовления микромеханического актюатора с функцией хранения, в котором сверхбыстрой закалкой из расплава получают слоистый композиционный материал с обратимым эффектом памяти формы в виде ленты, включающий кристаллический и аморфный слои с их сплошным неразрывным соединением на границе между ними и одинаковым химическим составом по обе стороны границы, отличающийся тем, что в аморфном слое композиционного материала делают протяженное сквозное отверстие вдоль ленты параллельно границе между слоями и формируют подвижный и неподвижный элементы актюатора таким образом, что с одного конца актюатора оба элемента остаются соединенными, а с другого конца актюатора создают захват для удержания микро- или нанообъектов путем разъединения элементов прорезью на расстояние, которое соответствует минимальному размеру захватываемого объекта, при этом положение и ширину прорези выбирают достаточными для получения неподвижного элемента аморфным, а подвижного элемента - аморфно-кристаллическим термочувствительным, обладающим обратимым эффектом памяти формы, с возможностью обратимо изменять величину зазора захвата при изменении температуры в интервале мартенситного превращения в кристаллическом слое, причем путем варьирования положения и ширины прорези изменяют также соотношение толщин аморфного и кристаллического слоев в термочувствительном подвижном элементе, которое определяет максимальный зазор захвата при нагреве термочувствительного элемента выше температуры конца обратного мартенситного превращения в кристаллическом слое и, соответственно, максимальный размер захватываемого объекта.
4. Способ по п. 3, отличающийся тем, что для изготовления микромеханического актюатора выбирают сплавы квазибинарной системы TiNi-TiCu с содержанием меди от 17 до 34 ат. %.
5. Способ по п. 3, отличающийся тем, что формирование захвата выполняют методом селективного ионного травления.
| МИКРОМЕХАНИЧЕСКОЕ УСТРОЙСТВО, СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ И СИСТЕМА МАНИПУЛИРОВАНИЯ МИКРО- И НАНООБЪЕКТАМИ | 2010 |
|
RU2458002C2 |
| КОМПОЗИТНЫЙ ФУНКЦИОНАЛЬНЫЙ МАТЕРИАЛ | 2008 |
|
RU2381903C2 |
| АКТЮАТОР, СИСТЕМА АКТЮАТОРОВ И СПОСОБ ЕГО ИЗГОТОВЛЕНИЯ | 2005 |
|
RU2305874C2 |
| ТЕРМОЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ ДЛЯ МИКРОМАНИПУЛЯТОРА (ВАРИАНТЫ) | 2004 |
|
RU2259914C1 |
| АКТЮАТОР НА ОСНОВЕ ФУНКЦИОНАЛЬНОГО МАТЕРИАЛА | 2013 |
|
RU2539605C2 |
| ТЕРМОЧУВСТВИТЕЛЬНЫЙ ПРИВОДНОЙ ЭЛЕМЕНТ | 2015 |
|
RU2617841C1 |
| US 4919177 A, 24.04.1990 | |||
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| JP 2010043530 A, 25.02.2010 | |||
| US 9833978 B2, 05.12.2017. | |||

