Изобретение относится к гироскопической технике, а более конкретно к двухосным гироскопическим стабилизаторам оптической линии визирования, работающим на подвижных объектах и предназначенным для стабилизации и управления линией визирования.
Известны двухосные гироскопические стабилизаторы оптического изображения, содержащие установленную на одном основании с фотоприемником рамку, установленные в рамке платформу с гироскопическими датчиками угловой скорости каналов азимута и высоты, и зеркало, связанное с платформой кинематической передачей с передаточным отношением 1:2, исполнительные двигатели каналов азимута и высоты, установленные на осях вращения рамки и зеркала, корректирующие устройства и усилители стабилизации каналов азимута и высоты, через которые сигналы с гироскопических датчиков угловой скорости поступают на исполнительные двигатели (Бабаев А.А. Стабилизация оптических приборов - Л.: "Машиностроение", 1975, стр.40-41).
Недостатком данных устройств является необходимость устанавливать гироскопические датчики угловой скорости на платформу для обеспечения необходимого соотношения между углом поворота зеркала и гироскопов, что увеличивает габариты и массу. Кроме того, кинематическая передача между платформой и зеркалом увеличивает моменты трения в системе, а погрешности кинематической передачи приводят к снижению точности стабилизации линии визирования.
Наиболее близким является стабилизатор линии визирования (Пат. РФ №2091843, МПК6 G 02 В 27/64), содержащий установленную на одном основании с фотоприемником рамку, установленное в рамке зеркало, исполнительные двигатели и датчики угла каналов азимута и высоты, установленные на осях вращения рамки и зеркала, гироскопические датчики угловой скорости каналов азимута и высоты, установленные на основании, усилительно-корректирующие устройства, через которые сигналы с гироскопических датчиков угловой скорости и датчиков угла поступают на исполнительные двигатели.
Недостатком такого стабилизатора является то, что гироскопические датчики угловой скорости находятся вне замкнутого контура стабилизации, поскольку не регистрируют непосредственно скорость вращения зеркала, и подвержены воздействию значительной угловой скорости основания. Указанные факторы снижают точность стабилизации линии визирования.
Задачей изобретения является уменьшение массы и габаритов системы стабилизации и наведения, а также повышение точности двухосного управляемого гиростабилизатора за счет устранения погрешностей и моментов трения в кинематической передаче и за счет непосредственного измерения угловой скорости движения зеркала.
Задача решается тем, что в известном устройстве стабилизации линии визирования, содержащем рамку, зеркало, исполнительные двигатели каналов азимута и высоты, установленные на осях вращения рамки и зеркала, усилительно-корректирующие устройства каналов азимута и высоты, выход каждого из которых связан с входом исполнительного двигателя соответствующего канала, датчик угла, установленный на оси вращения зеркала, гироскопический датчик угловой скорости канала азимута и гироскопический датчик угловой скорости канала высоты, гироскопический датчик угловой скорости канала высоты установлен на обратной стороне зеркала так, что его ось чувствительности параллельна оси вращения зеркала, а гироскопический датчик угловой скорости канала азимута установлен на рамке так, что его ось чувствительности параллельна оси вращения рамки, и дополнительно введены дифференцирующее устройство, вычислительное устройство, определяющее тангенс удвоенной входной величины, перемножитель, сумматор, вычитающее устройство и дополнительный гироскопический датчик угловой скорости, установленный на рамке так, что его ось чувствительности перпендикулярна осям вращения рамки и зеркала, причем вход дифференцирующего устройства соединен с выходом датчика угла, а выход соединен с входом сумматора, другой вход сумматора соединен с выходом гироскопического датчика угловой скорости канала высоты, а выход соединен с входом усилительно-корректирующего устройства канала высоты, вход вычислительного устройства соединен с выходом датчика угла, а выход с входом перемножителя, второй вход перемножителя соединен с выходом дополнительного гироскопического датчика угловой скорости, а выход соединен с инвертирующим входом вычитающего устройства, неинвертирующий вход вычитающего устройства соединен с выходом гироскопического датчика угловой скорости канала азимута, а выход соединен с входом усилительно-корректирующего устройства канала азимута.
На фиг.1 изображена принципиальная схема устройства стабилизации линии визирования.
Устройство содержит рамку 1, установленную на основании с вращением относительно оси перпендикулярной основанию, и расположенное в ней зеркало 2, вращающееся относительно оси перпендикулярной оси вращения рамки 1, установленные на осях вращения зеркала 2 и рамки 1 исполнительные двигатели каналов высоты 3 и азимута 4, гироскопический датчик угловой скорости канала высоты 5, установленный на обратной стороне зеркала 2 с осью чувствительности, параллельной оси вращения зеркала, гироскопический датчик угловой скорости канала азимута 6, установленный на рамке 1 с осью чувствительности, параллельной оси вращения рамки 1, дополнительный гироскопический датчик угловой скорости 7, установленный на рамке 1 с осью чувствительности, перпендикулярной осям вращения рамки 1 и зеркала 2, датчик угла 8, дифференцирующее устройство 9, вход которого связан с выходом датчика угла 8, сумматор 10, входы которого соединены с выходом датчика угла 8 и выходом гироскопического датчика угловой скорости канала высоты 5, усилительно-корректирующее устройство канала высоты 11, вход которого соединен с выходом сумматора 10, а выход соединен с входом исполнительного двигателя канала высоты 3, вычислительное устройство 12, определяющее тангенс удвоенной входной величины, вход которого соединен с выходом датчика угла 8, перемножитель 13, входы которого связаны с выходом вычислительного устройства 12 и выходом дополнительного гироскопического датчика угловой скорости 7, вычитающее устройство 14, инвертирующий вход которого соединен с выходом перемножителя 13, а неинвертирующий вход соединен с выходом гироскопического датчика угловой скорости канала азимута 6, усилительно-корректирующее устройство канала азимута 15, вход которого связан выходом вычитающего устройства 14, а выход связан с исполнительным двигателем канала азимута 4.
Устройство работает следующим образом. Отклонение рамки 1 и зеркала 2 от требуемого положения под действием возмущающих моментов фиксируется гироскопическими датчиками угловой скорости 5, 6 и 7. Сигнал с гироскопического датчика угловой скорости канала высоты 5 можно выразить через угловую скорость ошибки стабилизации оптического луча по этой оси  и угловые скорости движения основания ωx0 и ωz0 относительно осей, связанных с ним:
и угловые скорости движения основания ωx0 и ωz0 относительно осей, связанных с ним:
где ϕу - угол поворота рамки относительно основания. Этот сигнал поступает на сумматор 10, где складывается с сигналом по относительной угловой скорости зеркала
полученной в дифференцирующем устройстве 9 путем дифференцирования сигнала с датчика угла 8. На выходе сумматора 10 получается сигнал ошибки по скорости оптического луча , который через усилительно-корректирующее устройство канала высоты 11 поступает на исполнительный двигатель канала высоты 3, создающий момент, направленный на уменьшение величины рассогласования в канале высоты β.
Сигнал с гироскопического датчика угловой скорости канала азимута 6, установленного на рамке 1 можно выразить через угловую скорость ошибки стабилизации оптического луча по этой оси  и угловые скорости движения основания ωx0 и ωz0 относительно осей, связанных с ним:
и угловые скорости движения основания ωx0 и ωz0 относительно осей, связанных с ним:

Этот сигнал поступает на неинвертирующий вход вычитающего устройства 14. Сигнал с дополнительного гироскопического датчика угловой скорости 7, установленного на рамке 1 и измеряющего угловую скорость ωx1=(ωx0cosϕy-ωz0sinϕy), поступает на вход перемножителя 13, на второй вход которого через устройство вычисления тангенса 12, поступает сигнал с датчика угла 8, равный tg2ϕЗ. В результате на выходе перемножителя 13 получается сигнал (ωx0cosϕy-ωz0sinϕу)·tg2ϕЗ.
Сигнал с выхода перемножителя 13 поступает на инвертирующий вход вычитающего устройства 14. На выходе устройства 14 получается сигнал ошибки по скорости оптического луча  , который через усилительно-корректирующее устройство канала азимута 15 поступает на исполнительный двигатель канала азимута 4, создающий момент, направленный на уменьшение величины рассогласования в канале горизонтального наведения α.
, который через усилительно-корректирующее устройство канала азимута 15 поступает на исполнительный двигатель канала азимута 4, создающий момент, направленный на уменьшение величины рассогласования в канале горизонтального наведения α.
Множитель 1/2 обусловлен тем, что по оси вертикального наведения угловая скорость оптического луча в два раза больше, чем угловая скорость зеркала.
То, что сигнал ошибки канала вертикального наведения имеет делитель cos2ϕЗ, позволяет сохранить неизменным коэффициент передачи контура стабилизации при изменении угла вертикального наведения, улучшая динамику системы (Пельпор Д.С., Колосов Ю.А., Рахтеенко Е.Р. Расчет и проектирование гироскопических стабилизаторов. - М.: Машиностроение, 1972).
Установка гироскопических датчиков на зеркале и на рамке позволяет уменьшить массу и габариты системы за счет отсутствия платформы, а введение гироскопических датчиков внутрь замкнутого контура стабилизации и отсутствие кинематической передачи между зеркалом и гироскопическими датчиками позволяет повысить точность системы. Предлагаемая схема особенно целесообразна при использовании микромеханических датчиков угловой скорости.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОВЫШЕНИЯ ТОЧНОСТИ ГИРОСКОПИЧЕСКОЙ СИСТЕМЫ СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 2018 |
|
RU2693561C1 |
| Система стабилизации изображения на подвижном основании | 2019 |
|
RU2753162C2 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 2009 |
|
RU2414732C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 1995 |
|
RU2102785C1 |
| ДВУХОСНЫЙ УПРАВЛЯЕМЫЙ ГИРОСТАБИЛИЗАТОР | 2005 |
|
RU2293949C1 |
| Двухосная стабилизация изображения на подвижном основании без ограничения углов прокачки | 2023 |
|
RU2833345C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 2021 |
|
RU2785798C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ИЗОБРАЖЕНИЯ НА ПОДВИЖНОМ ОСНОВАНИИ | 2002 |
|
RU2225024C1 |
| ГИРОСТАБИЛИЗАТОР ОПТИЧЕСКИХ ЭЛЕМЕНТОВ | 2016 |
|
RU2625643C1 |
| СПОСОБ УПРАВЛЕНИЯ И СТАБИЛИЗАЦИИ ПОДВИЖНОГО НОСИТЕЛЯ, ИНТЕГРИРОВАННАЯ СИСТЕМА, УСТРОЙСТВО ПРИВЕДЕНИЯ ЗЕРКАЛА АНТЕННЫ В ПОВОРОТНОЕ ДВИЖЕНИЕ В ДВУХ ВЗАИМНО ПЕРПЕНДИКУЛЯРНЫХ ПЛОСКОСТЯХ И УСТРОЙСТВО ПРИВЕДЕНИЯ В ДЕЙСТВИЕ ДИФФЕРЕНЦИАЛЬНЫХ АЭРОДИНАМИЧЕСКИХ РУЛЕЙ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2423658C2 |
Изобретение относится к гироскопической технике, а более конкретно к двухосным гироскопическим стабилизаторам оптической линии визирования, работающим на подвижных объектах и предназначенным для стабилизации и управления линией визирования. Устройство содержит рамку, зеркало, исполнительные двигатели каналов азимута и высоты, установленные на осях вращения рамки и зеркала, усилительно-корректирующие устройства каналов азимута и высоты, выход каждого из которых связан с входом исполнительного двигателя соответствующего канала, датчик угла, установленный на оси вращения зеркала, гироскопический датчик угловой скорости канала азимута и гироскопический датчик угловой скорости канала высоты. Гироскопический датчик угловой скорости канала высоты установлен на обратной стороне зеркала так, что его ось чувствительности параллельна оси вращения зеркала, а гироскопический датчик угловой скорости канала азимута установлен на рамке так, что его ось чувствительности параллельна оси вращения рамки. Дополнительно введены дифференцирующее устройство, вычислительное устройство, определяющее тангенс удвоенной входной величины, перемножитель, сумматор, вычитающее устройство и дополнительный гироскопический датчик угловой скорости, установленный на рамке так, что его ось чувствительности перпендикулярна осям вращения рамки и зеркала. Техническим результатом является уменьшение массы и габаритов системы стабилизации, а также повышение точности двухосного управляемого гиростабилизатора за счет отсутствия кинематической передачи между зеркалом и гироскопическими датчиками. 1 ил.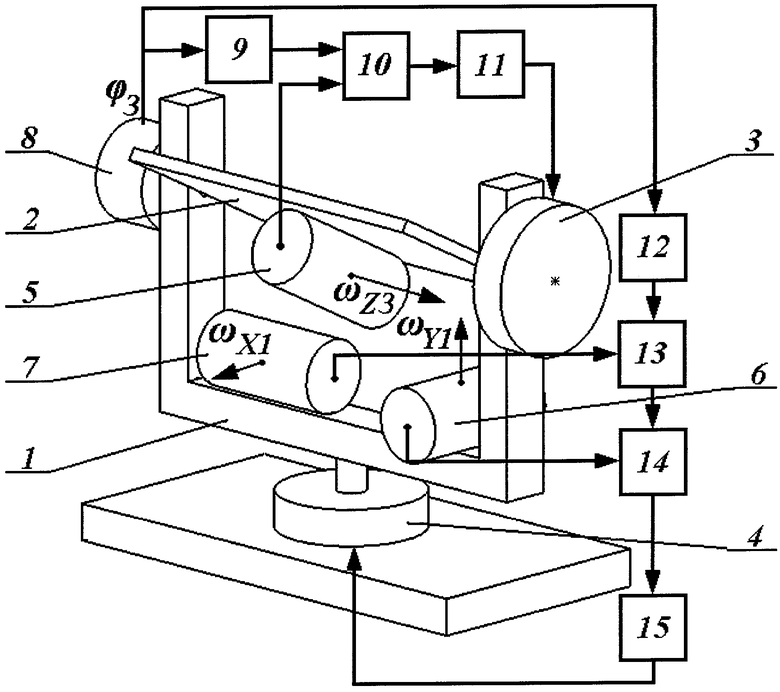
Устройство стабилизации линии визирования, содержащее рамку, зеркало, исполнительные двигатели каналов азимута и высоты, установленные на осях вращения рамки и зеркала, усилительно-корректирующие устройства каналов азимута и высоты, выход каждого из которых связан со входом исполнительного двигателя соответствующего канала, датчик угла, установленный на оси вращения зеркала, гироскопический датчик угловой скорости канала азимута и гироскопический датчик угловой скорости канала высоты, отличающееся тем, что гироскопический датчик угловой скорости канала высоты установлен на обратной стороне зеркала так, что его ось чувствительности параллельна оси вращения зеркала, а гироскопический датчик угловой скорости канала азимута установлен на рамке так, что его ось чувствительности параллельна оси вращения рамки, дополнительно введены дифференцирующее устройство, вычислительное устройство, определяющее тангенс удвоенной входной величины, перемножитель, сумматор, вычитающее устройство и дополнительный гироскопический датчик угловой скорости, установленный на рамке так, что его ось чувствительности перпендикулярна осям вращения рамки и зеркала, причем вход дифференцирующего устройства соединен с выходом датчика угла, а выход соединен с входом сумматора, другой вход сумматора соединен с выходом гироскопического датчика угловой скорости канала высоты, а выход соединен с входом усилительно-корректирующего устройства канала высоты, вход вычислительного устройства соединен с выходом датчика угла, а выход - с входом перемножителя, второй вход перемножителя соединен с выходом дополнительного гироскопического датчика угловой скорости, а выход соединен с инвертирующим входом вычитающего устройства, неинвертирующий вход вычитающего устройства соединен с выходом гироскопического датчика угловой скорости канала азимута, а выход соединен со входом усилительно-корректирующего устройства канала азимута.
| СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 1996 |
|
RU2104578C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ЛИНИИ ВИЗИРОВАНИЯ | 1995 |
|
RU2102785C1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ ОПТИЧЕСКОГО ИЗОБРАЖЕНИЯ | 1994 |
|
RU2091843C1 |
| СИСТЕМА СТАБИЛИЗАЦИИ ИЗОБРАЖЕНИЯ НА ПОДВИЖНОМ ОСНОВАНИИ | 2002 |
|
RU2225024C1 |
| US 4883347 А, 28.11.1989 | |||
| US 5867317 A, 02.02.1999 | |||
| US 3552216 A, 05.01.1971. | |||

