Изобретение относится к машиностроению и предназначено для использования в промышленных роботах, применяемых для выполнения подъемно-транспортных, монтаж- но-сборочных и технологических операций, а также может быть использовано в дистанционных манипуляторах, работающих в экстремальных условиях.
Целью изобретения является обеспечение надежности работы и расширение технологических возможностей схвата за счет исключения влияния состояния поверхности захватываемого объекта на процесс его опознавания.
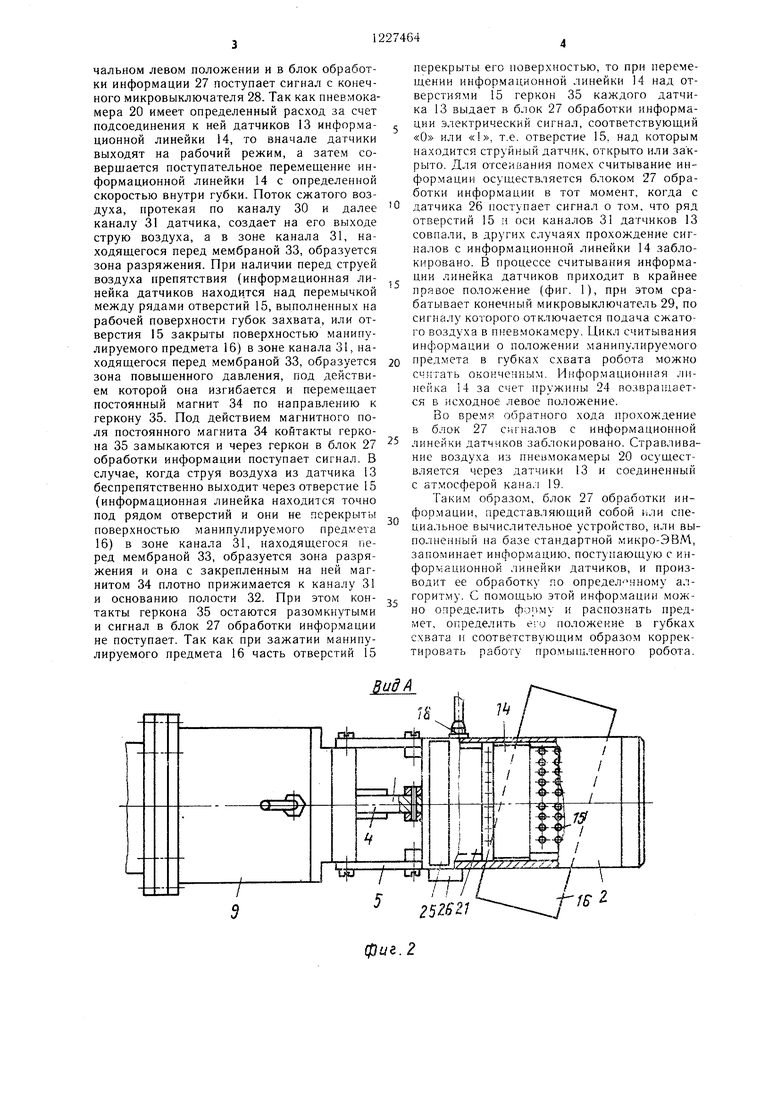
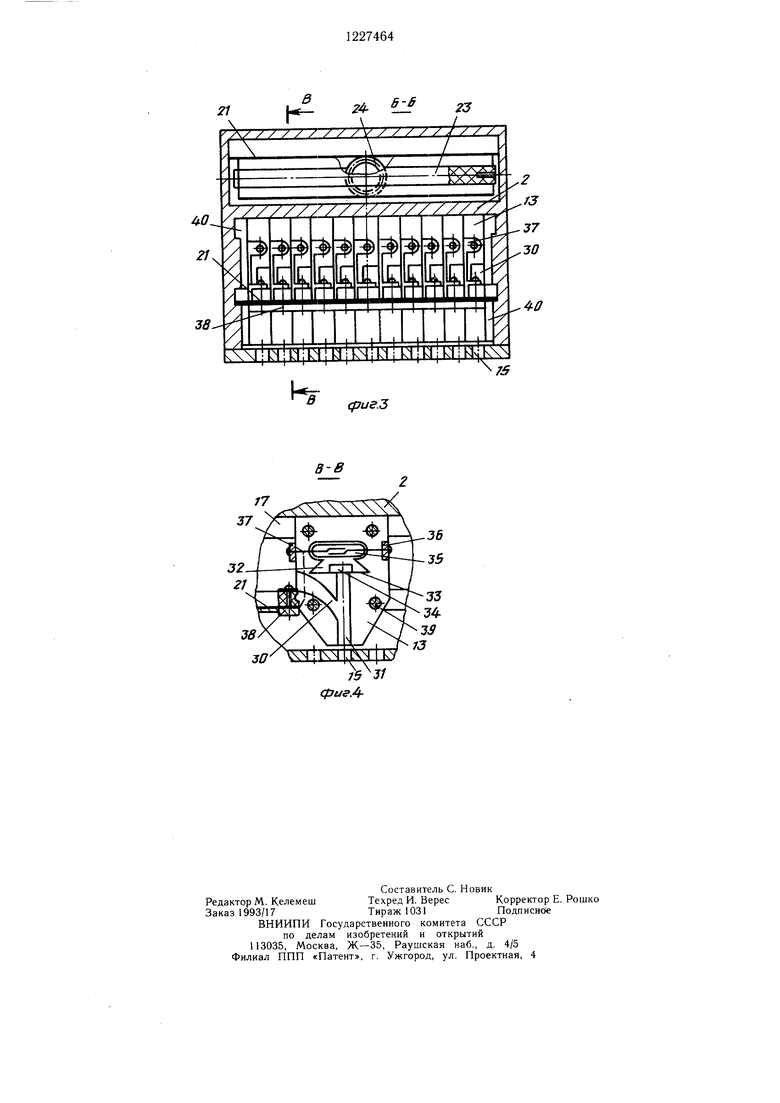
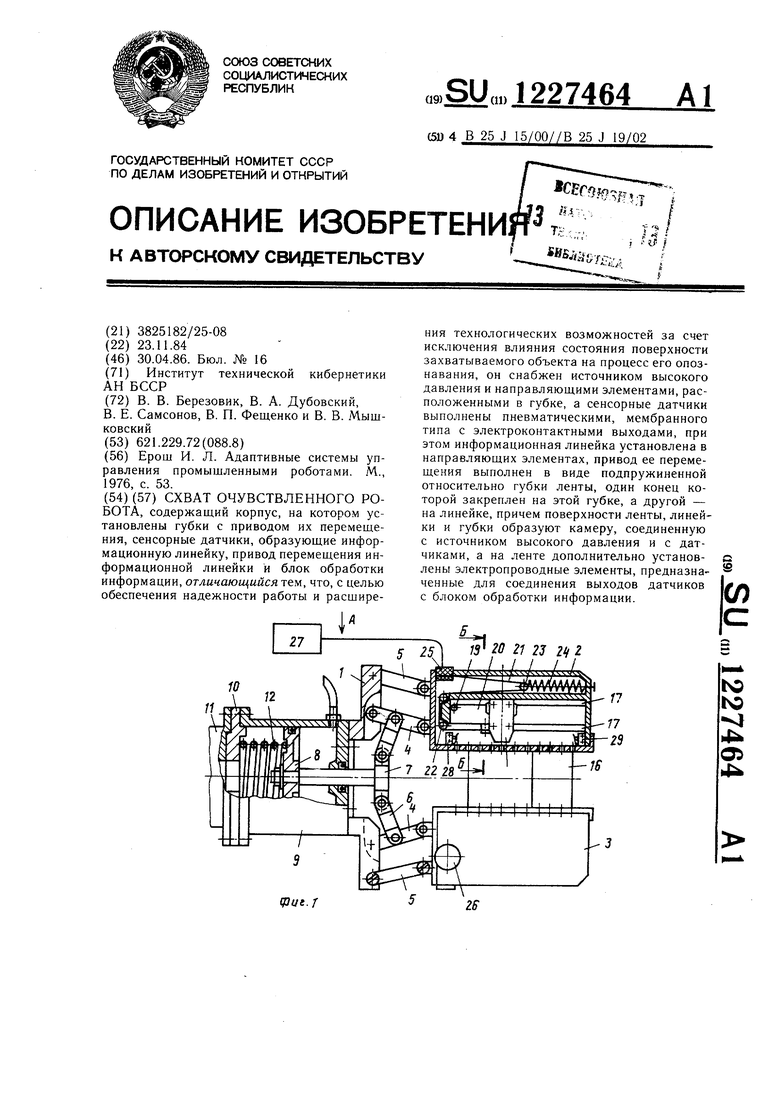
На фиг. 1 изображен схват, общий вид; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - разрез В-В на фиг. 3.
Схват очувствленного робота состоит из корпуса 1, губок 2 и 3, соединенных с корпусом 1 с помощью шарнирных много- звенников, выполненных из ведущих зве- ньев 4 и тяг 5. Ведущие звенья 4 шарнирных многозвенников с помощью промежуточных рычагов 6 соединены со штоком 7 и поршнем 8 силового привода. Силовой привод, например пневмоцилиндр 9 одностороннего действия, крепится своей передней стенкой к корпусу 1 схвата, а задней стенкой 10 - к рычагу промышленного робота 11. Между задней крышкой 10 пневмо- цилиндра 9 установлена возвратная пружина 12. Одна из губок, например губ- ка 2, или обе губки 2 и 3 снабжены сенсорными пневматическими датчиками 13 мембранного типа с электроконтактными выходами, образующими информационную линейку 14. Число сенсорных датчиков 13 равно числу дорожек перфорированных от- верстий 15 на рабочей поверхности схвата, через которые считывается информация о положении манипулируемого объекта 16.
Информационная линейка 14 перемещается по направляющим элементам 17 внутри корпуса губки 2 с помощью сжатого воз- духа, который через штуцер 18 и канал 19 от источника высокого давления (не показан) поступает в пневмокамеру 20, образованную поверхностями информационной линейки 14, плоской гибкой ленты 21 и губки 2. Плоская гибкая лента.21 огибает направляющие ролики 22 и натяжной ролик 23, соединенный с возвратной пружиной 24 растяжения, и закрепляется с одной стороны на клеммной колодке 25, с другой - на информационной линейке 14. Один из роли- ков 22 кинематически соединен с датчиком 26 обратной связи, который выдает сигнал в блок 27 обработки информации в том случае, когда информационная линейка 14 находится точно над рядом перфорированных отверстий 15 и воз- можно считывание информации об объекте 16 расположенном между губками 2 и 3 захвата. Начальное и конечное положение ин5
0 п 5
0 5
формационной линейки 14 определяется с помощью конечных микровыключателей 28 и 29. Число сенсорных датчиков 3 в информационной линейке 14 определяется необходимой разрешающей способностью и габаритными размерами датчиков. Каждый датчик 13 состоит из канала 30, расположенного под углом к центральному каналу 31, являющегося информационным и соединенного непосредственно с полостью 32. В полости 32 установлена мембрана 33, на поверхности которой закреплен постоянный магнит 34. В верхней части полости 32 установлен геркон 35, один из выводов которого соединен с контактами планки 36, а второй с помощью перемычки 37 контакта датчи- сов 13 соединен q соответствующим проводником гибкого токоподвода, выполненным на гибкой плоской ленте 21, например, с помощью напыления или с помощью металлической жилы, проложенной внутри ленты. Гибкая плоская лента 21 механически крепится к информационной линейке 14 с помощью планки 38. Таким образом, выходы датчиков 13 соединены электрически с помощью гибкого токоподвода - ленты 21 через клеммную колодку 25 с электропроводными элементами с блоком 27 обработки информации.
Каналы 30 и 31, полость 32 выполнены в виде углублений определенной формы, получаемых при изготовлении модуля методом прессования, например, из термостойкой пластмассы. Датчики 13 собираются последовательно в пакет с помощью крепежных элементов 39 таким образом, что открытые каналы каждого предыдущего датчика закрываются плоским основанием последующего, причем первый и последний датчики закрываются крышками 40. Подвод воздуха к ним осуществляется по питающим каналам 30 за счет создания высокого давления в пневмокамере 20.
Работает схват следующим образом.
При подаче команды на зажим манипулируемого предмета 16 сжатый воздух поступает в рабочую полость пневмо- цилиндра 9 и воздействует на поршень 8, который совершает рабочий ход, сжимая при этом возвратную пружину 12. Шток 7, перемещаясь совместно с поршнем 8 с равным усилием, воздействует на промежуточные рычаги 6 и на ведущие звенья 4 шарнирных многозвенников, которые с тягами 5 и зажимными губками 2 и 3 образуют механизмы параллелограммов, благодаря которым обеспечивается параллельность движения зажимных губок 2 и 3 схвата. После окончания процесса зажима манипулируемого предмета 16 с некоторой задержкой, подобранной в процессе отладки схвата, сжатый воздух поступает с источника высокого давления через регулируемые дроссели (не показаны) в пневмокамеру 20. При этом информационная линейка 14 находится в на
чальном левом положении и в блок обработки информации 27 поступает сигнал с конечного микровыключателя 28. Так как пневмока- мера 20 имеет определенный расход за счет подсоединения к ней датчиков 13 информационной линейки 14, то вначале датчики выходят на рабочий режим, а затем совершается поступательное перемещение информационной линейки 14 с определенной скоростью внутри губки. Поток сжатого воздуха, протекая по каналу 30 и далее каналу 31 датчика, создает на его выходе струю воздуха, а в зоне канала 31, находящегося перед мембраной 33, образуется зона разряжения. При наличии перед струей воздуха препятствия (информационная ли- нейка датчиков находится над перемычкой между рядами отверстий 15, выполненных на рабочей поверхности губок захвата, или отверстия 15 закрыты поверхностью манипу- лируемого предмета 16) в зоне канала 31, находящегося перед мембраной 33, образуется зона повышенного давления, под действием которой она изгибается и перемещает постоянный магнит 34 по направлению к геркону 35. Под действием магнитного поля постоянного магнита 34 контакты герко- на 35 замыкаются и через геркон в блок 27 обработки информации поступает сигнал. В случае, когда струя воздуха из датчика 13 беспрепятственно выходит через отверстие 15 (информационная линейка находится точно под рядом отверстий и они не перекрыты поверхностью манипулируемого предмета 16) в зоне канала 31, находящегося перед мембраной 33, образуется зона разряжения и она с закрепленным на ней магнитом 34 плотно прижимается к каналу 3 и основанию полости 32. При этом кон- такты геркона 35 остаются разомкнутыми и сигнал в блок 27 обработки информации не поступает. Так как при зажатии манипулируемого предмета 16 часть отверстий 15
0
0 с
0
перекрыты его поверхностью, то при перемещении информационной линейки 14 над отверстиями 15 геркон 35 каждого датчика 13 выдает в блок 27 обработки информации электрический сигнал, соответствующий «О или «1, т.е. отверстие 15, над которым находится струйный датчик, открыто или закрыто. Для отсеивания помех считывание информации осуществляется блоком 27 обработки информации в тот момент, когда с датчика 26 поступает сигнал о том, что ряд отверстий 15 и оси каналов 31 датчиков 13 совпали, в других случаях прохождение сигналов с информационной линейки 14 заблокировано. В процессе считывания информации линейка датчиков приходит в крайнее правое положение (фиг. 1), при этом срабатывает конечный микровыключатель 29, по сигналу которого отключается подача сжатого воздуха в пневмокамеру. Цикл считывания информации о положении манипулируемого предмета в губках схвата робота можно счмтать оконченным. Информационная линейка 14 за счет пружины 24 возвращается в исходное левое положение.
Во время обратного хода прохождение в блок 27 сигналов с информационной линейки датчь1ков заблокировано. Стравливание воздуха из пнеимокамеры 20 осуществляется через датчики 13 и соединенный с атмосферой кана.ч 19.
Таким образом, блок 27 обработки информации, представляющий собой (.ли специальное вычислительное устройство, или выполненный на базе стандартной микро-ЭВМ, запоминает информацию, поступающую с информационной линейки датчиков, и производит ее обработку по определ нному алгоритму. С помощью этой информации можно определить форму и распознать предмет, определить его положение в губках схвата и соответствующим образом корректировать работу промышленного робота.
фи.2
21
В
К2 l/
23
/ / / / 7 / / / Y// / / //7 Л/
38.
.J k-1 k1 i И i И i kN i k11 М j И i k1 i M KXN
7S
(pue.3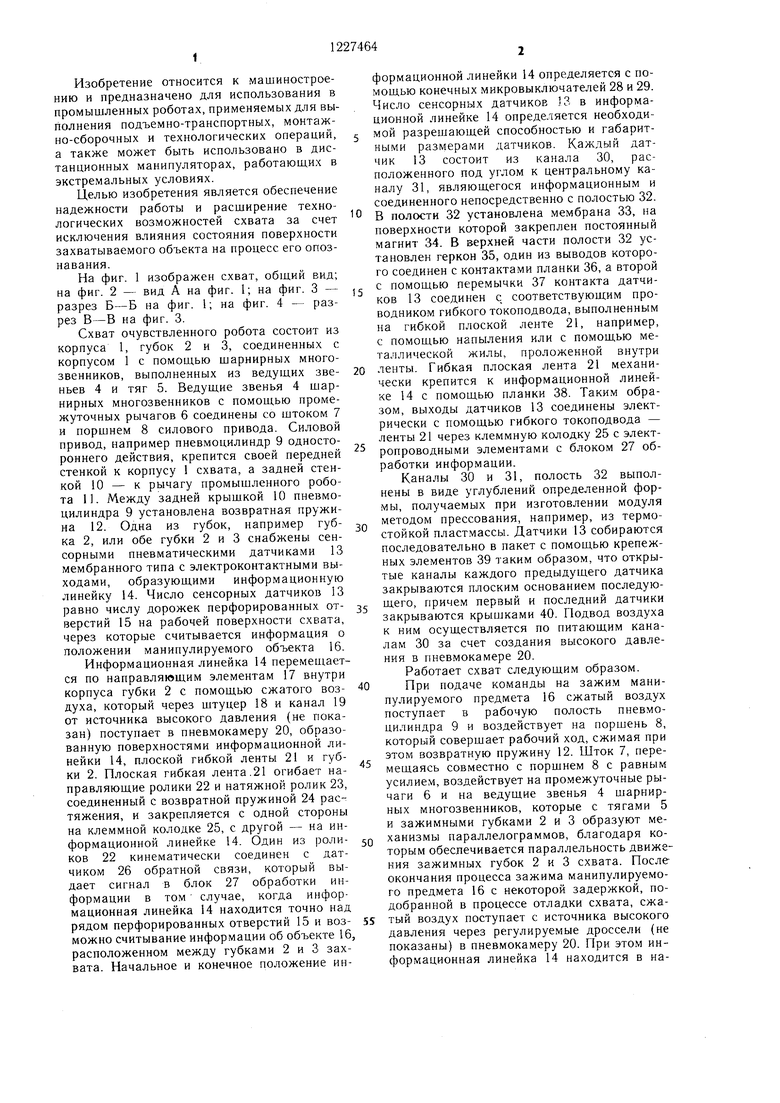
| название | год | авторы | номер документа |
|---|---|---|---|
| Очувствленный схват робота | 1990 |
|
SU1815223A1 |
| Очувствленный схват манипулятора | 1982 |
|
SU1134361A1 |
| Устройство для стыковки сменного инструмента манипулятора | 1984 |
|
SU1288047A1 |
| Измерительный схват промышленного робота | 1984 |
|
SU1278204A1 |
| Схват промышленного робота | 1984 |
|
SU1250452A1 |
| Автоматический манипулятор с программным управлением | 1985 |
|
SU1390014A1 |
| Схват манипулятора | 1984 |
|
SU1192970A1 |
| ЗАХВАТ МАНИПУЛЯТОРА | 2001 |
|
RU2207246C1 |
| Устройство управления схватом манипулятора | 1987 |
|
SU1442395A2 |
| Устройство управления схватом манипулятора | 1988 |
|
SU1824299A1 |
37
3-8
2
.
W VvNTTVN
13
фиг.4
| Ерош И | |||
| Л | |||
| Адаптивные системы управления промышленными роботами | |||
| М., 1976, с | |||
| Веникодробильный станок | 1921 |
|
SU53A1 |
