Изобретение относится к области робототехники, а именно к захватным устройствам, предназначенным для удержания и микропозиционирования миниатюрных механических деталей и электронных компонентов.
Аналогом изобретения является техническое решение по патенту US 4610475, в нем схват имеет два пьезоэлектрических пальца, подключенных к одному источнику напряжения. Указанный схват имеет только возможность зажатия и отпускания детали, обратная связь положения детали в схвате отсутствует. Аналогичные признаки у схвата пьезоэлектрического манипулятора по патенту RU2172239.
Известен также микросхват с силовым очувствлением по патенту RU 2261170. Он содержит корпус схвата, верхний и нижний зажимные пальцы, выполненные, например, пьезоэлектрическими, на которых закреплены пьезорезистивные чувствительные элементы. Наличие силового очувствления не дает возможности точного микропозиционирования пальцев схвата с деталью.
Известен также пьезоэлектрический микросхват с приводами, датчиками и системой управления, патент CN 2761377, который является мехатронным. Он включает два пальца, закрепленные на основании и выполненные в виде биморфных пьезоэлектрических актюаторов, подключенных к управляющему устройству, содержащему компьютер (микроконтроллер), источник питания пальцев схвата на цифроаналоговых преобразователях, измерители деформации пальцев (пьезорезистивные датчики деформаций), подключенные по мостовой измерительной схеме через аналого-цифровые преобразователи к компьютеру. Наличие силового очувствления также не дает возможности точного микропозиционирования пальцев схвата с деталью.
Наиболее близким по технической сущности к заявляемому изобретению является мехатронный пьезоэлектрический схват с приводами и системой управления, патент RU 2425747. Он включает в себя пальцы, закрепленные на основании и выполненные в виде биморфных пьезоэлектрических актюаторов, подключенных к управляющему устройству, содержащему микроконтроллер, подключенный через порт связи к ЭВМ верхнего уровня, и цифроаналоговые преобразователи, которые подключены к каждому биморфному пьезоэлектрическому актюатору отдельно. Этот мехатронный схват позволяет осуществлять захватывание детали и ее микропозиционирование вместе со охватом. Очувствление охвата осуществляется за счет того, что один палец схвата работает в режиме привода, а другой палец работает в режиме датчика, т.е. воздействие на палец-датчик осуществляется через зажимаемую деталь. Недостаток такого технического решения заключается в том, что возможно возникновение ложных сигналов от пальца-датчика из-за внешних вибраций и ударов, возникающих в конструкции робота при его работе. Кроме того, определение точного положения пальцев схвата относительно корпуса схвата возможно только при помощи внешних обратных связей, например при помощи системы технического зрения, которое является сложным и дорогим устройством.
Раздельное подключение напряжения питания к биморфным пьезоэлектрическим актюаторам позволяет осуществлять микропозиционирование пальцев схвата для захвата деталей. Величина и полярность напряжения питания пальцев управляются компьютером. Прототип имеет функцию детектирования процесса захвата. Недостатком прототипа является низкая точность микропозиционирования и низкое быстродействие, так как отсутствует обратная связь по положению детали относительно корпуса схвата.
Технической задачей изобретения является увеличение точности микропозиционирования детали в схвате и повышение быстродействия, а также повышение надежности работы схвата. Решение данной задачи достигнуто за счет того, что в пьезоэлектрическом схвате, включающем пальцы, закрепленные на корпусе и выполненные в виде биморфных пьезоэлектрических актюаторов, подключенных к управляющему устройству, содержащему микроконтроллер, подключенный через порт связи к ЭВМ верхнего уровня, и цифроаналоговые преобразователи, которые подключены к каждому биморфному пьезоэлектрическому актюатору отдельно, каждый палец содержит емкостной датчик, выполненный в виде закрепленной на корпусе параллельно пальцу диэлектрической пластины с металлизированной поверхностью, разделенной на два равных электрода, подключенных к ЭВМ верхнего уровня через преобразователь сигналов датчиков.
Сущность изобретения состоит в том, что каждый емкостной датчик формируется за счет образования двух электрических емкостей между наружным электродом биморфного пьезоактюатора и электродами металлизированной диэлектрической пластины, закрепленной на корпусе схвата.
В заявляемом пьезоэлектрическом схвате в отличие от прототипа есть наличие двух датчиков положения каждого пальца в отдельности. Причем они установлены на корпусе схвата и выполнены в виде двух металлизированных участков диэлектрической пластины, а на подвижных пальцах схвата отсутствуют дополнительные электропроводящие пластины, необходимые для формирования электрической емкости. Таким образом, в качестве электропроводящих пластин на каждом пальце схвата служат электроды биморфных пьезоактюаторов.
Технические эффекты:
- повышение точности микропозиционирования достигается за счет коррекции положения пальцев благодаря обратной связи при помощи емкостных датчиков, расположенных непосредственно рядом с местом контакта пальцев с деталью;
- повышение надежности достигается за счет уменьшения влияния внешних вибраций на управление пальцами схвата при контакте с деталью;
- повышение быстродействия достигается также за счет осуществления обратной связи по положению пальцев относительно корпуса схвата.
Благодаря заявляемому техническому решению возможно также осуществление тактильного очувствления схвата при управляемом перемещении каждого пальца в отдельности до момента соприкосновения детали с двумя пальцами.
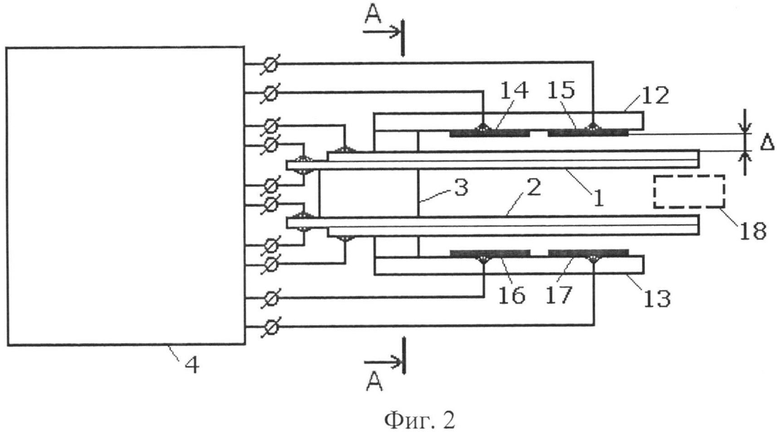
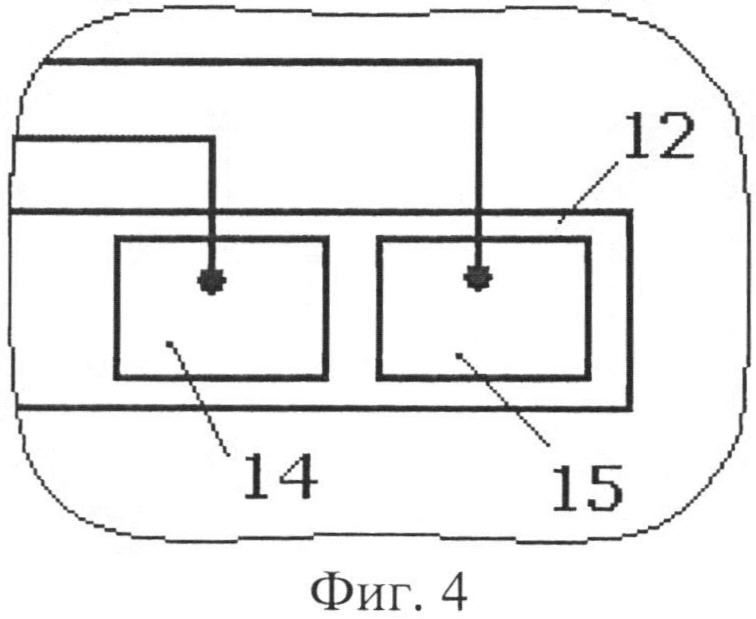
Сущность изобретения поясняется следующими чертежами: на фиг.1 изображен пьезоэлектрический схват; на фиг.2 - конструкция емкостных датчиков; на фиг.3 - вид на пластину датчика со стороны пальца, на фиг.4 - разрез пьезоэлектрического схвата по А-А.
Пьезоэлектрический схват (фиг.1) содержит два пальца, выполненные в виде биморфных пьезоэлектрических актюаторов (БПА) 1, 2, закрепленных на корпусе схвата 3. БПА 1, 2 подключены к управляющему устройству 4. Управляющее устройство 4 содержит микроконтроллер (МК) 5 со встроенной Flash памятью, соединенный с ЭВМ верхнего уровня 6 через порт связи 7 и через шину вывода данных из МК 8 с цифроаналоговыми преобразователями (ЦАП) 9 и 10. ЭВМ верхнего уровня 6 соединен также преобразователем сигналов датчиков 11, который в свою очередь подсоединен к двум емкостным датчикам (показанных на фиг.1 условно, а на фиг.2, 3 и 4 подробно). Первый из них установлен на диэлектрической пластине 12, а второй - на диэлектрической пластине 13 (фиг.2), которые параллельны пальцам и закреплены на ш-образном корпусе схвата 3 (фиг.3).
Первый емкостной датчик, установленный на пальце с БПА 1, содержит две последовательно соединенные электрические емкости: одна - между металлизированным участком 14 и верхним электродом БПА 1, другая - между металлизированным участком 15 и верхним электродом БПА 1(фиг.2). Одинаковые металлизированные участки 14 и 15 расположены на диэлектрической пластине 12 (фиг.4), которая может быть выполнена, например, из фольгированного стеклотекстолита толщиной 1 мм.
Аналогично для другого пальца с БПА 2. Емкостной датчик содержит две последовательно соединенные электрические емкости: одна - между металлизированным участком 16 и нижнем электродом БПА 2, другая - между металлизированным участком 17 и нижним электродом БПА 2 (фиг.2). Металлизированные участки 16 и 17 расположены на диэлектрической пластине 13.
Пьезоэлектрический схват реализует следующие основные функции манипулирования деталью 18:
- захватывание детали 18;
- отпускание детали 18;
- удержание детали 18;
- микропозиционирование зажатой детали 18 относительно корпуса схвата 3.
Управляющее устройство 4 выполняет следующие функции:
- раздельное управление напряжениями питания, подаваемыми на БПА 1, БПА 2 для управления изгибом БПА 1 и БПА 2 при помощи управляющей программы, находящейся во Flash памяти МК 5 через ЦАП 9 и ЦАП 10;
- осуществление связи управляющего устройства 4 с ЭВМ верхнего уровня 6, задающей необходимое перемещение пальцев схвата.
Пьезоэлектрический схват работает следующим образом.
Для захвата детали 18 пьезоэлектрическим охватом ЭВМ верхнего уровня 6 на МК 5 выдает сигнал управления. Далее по программе МК 5 выдает управляющие цифровые сигналы на ЦАП 9 и ЦАП 10, которые преобразуют их в нарастающее напряжение. В результате этого подключенные к ЦАП 9 и ЦАП 10 пальцы с БПА 1 и БПА 2 изгибаются и сближаются до соприкосновения с деталью 18.
Для определения момента касания пальцев схвата с деталью 18 используется информация от емкостных датчиков: при нарастании напряжений на БПА 1 и 2 емкость каждого датчика С, равная емкости двух последовательных емкостей в цепи каждого емкостного датчика, уменьшается в соответствии с формулой
где ε0 - диэлектрическая постоянная вакуума; ε - относительная диэлектрическая проницаемость среды; S - площадь металлизированного участка 14 (или 15, 16, 17 при условии их равенства); Δ - среднее расстояние между БПА 1 (или 2) и пластиной 12 (или 13). Фактически изменение Δ характеризует изменение положение пальца относительно корпуса схвата 3, т.к. эти величины одинаковы. Таким образом, по измеренной емкости каждого из двух емкостных датчиков можно судить о расстоянии, пройденном каждым пальцем при подаче напряжения на БПА 1 или БПА 2. Если заранее откалибровать зависимость перемещения свободного пальца от напряжения, то можно с высокой точностью определить положение свободного пальца относительно корпуса схвата при заданном напряжении.
Как только происходит контакт детали 18 с двумя пальцами, они перестают сближаться и емкость каждого датчика остается постоянной, несмотря на то что напряжения на обоих БПА возрастает. Этот момент фиксирует ЭВМ верхнего уровня 6 при сравнении сигналов, поступающих от датчиков через преобразователь сигналов датчиков 11 и управляющих сигналов, поступающих на БПА 1 и БПА 2. По уровню сигналов датчиков определяется координата положения детали 18 относительно корпуса схвата 3. В прототипе эта функция отсутствует. По сравнению с прототипом нет необходимости вводить вибрацию одного пальца для определения контакта при помощи другого пальца, что повышает надежность и быстродействие схвата.
Отпускание детали 18 осуществляется двумя пальцами схвата, при подаче на них через ЦАП 9 и ЦАП 10 напряжения питания противоположной полярности, что приводит к разжиманию пальцев схвата и отпусканию детали 18. Момент отпускания детали 18 также можно контролировать по моменту начала изменения (в данном случае увеличения) емкости датчиков как и в случае определения момента касания схвата с деталью.
Удержание детали в схвате осуществляется за счет подачи на БПА 1 и 2 пальцев напряжения заданного уровня, достаточного для удержания детали 18, зависящего от ее массы и максимальных ускорений.
Функция пьезоэлектрического схвата - микропозиционирование зажатой в схвате детали, осуществляется при помощи изменения уровней напряжения питания для БПА 1 и БПА 2 в отдельности, согласно управляющей программе, находящейся во Flash памяти МК 5. При подаче на БПА 1 и 2 одинакового постоянного напряжения пальцы симметрично сближаются до зажима детали 18. Далее по программе от МК 5 подаются разные управляющие сигналы на ЦАП 9 и ЦАП 10 таким образом, что напряжение на выходе ЦАП 9 возрастает, а на выходе ЦАП 10 уменьшается на одинаковую величину. В этом случае первый палец изгибается еще сильнее, а второй палец распрямляется, что приводит к смещению детали 18 на величину микропозиционирования. В отличие от прототипа пьезоэлектрический схват имеет обратную связь по положению пальцев схвата и, следовательно, по положению детали 18 в схвате.
Таким образом, заявляемое изобретение является пьезоэлектрическим охватом с повышенной надежностью, быстродействием и точностью позиционирования.
При реализации заявляемого изобретения в качестве пальцев могут быть использованы пьезоэлектрические биморфные преобразователи, выпускаемые фирмой ОАО «ЭЛПА» (Россия) и имеющие размеры 35×2,5×0,6 мм. В качестве преобразователей сигналов датчиков могут быть использованы преобразователи «емкость-код» EVAL-AD7745/46EB фирмы ANALOG DEVICES (США) с разрешающей способностью 18 разрядов. Тогда свободный ход каждого пальца составит ±0,5 мм при максимальном напряжении питания ±150 В, а микропозиционирование будет осуществляется в диапазоне ±0,1 мм с точностью не хуже 0,1 мкм при емкости датчиков порядка 4 пФ.
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАТРОННЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ СХВАТ | 2010 |
|
RU2425747C1 |
| МИКРОСИСТЕМНЫЙ ЗАХВАТ | 2015 |
|
RU2598416C1 |
| САМОЧУВСТВИТЕЛЬНЫЙ МНОГОСЛОЙНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ АКТЮАТОР | 2015 |
|
RU2616225C1 |
| МАГНИТОСТРИКЦИОННЫЙ МИКРОСХВАТ | 2009 |
|
RU2417877C1 |
| Устройство для измерения параметров рельефа поверхности и механических свойств материалов | 2019 |
|
RU2731039C1 |
| УСТРОЙСТВО ДЛЯ ВВОДА ИНФОРМАЦИИ В ЭВМ | 2000 |
|
RU2166203C1 |
| ДВУХКООРДИНАТНЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ ДЕФЛЕКТОР | 2009 |
|
RU2402795C1 |
| ПЬЕЗОАКТЮАТОР ИЗГИБНОГО ТИПА | 2024 |
|
RU2822976C1 |
| ПЬЕЗОАКТЮАТОР ИЗГИБНОГО ТИПА | 2023 |
|
RU2819557C1 |
| Сборочное устройство | 1978 |
|
SU751566A1 |

Изобретение относится к области робототехники, а именно к захватным устройствам, предназначенным для удержания и микропозиционирования миниатюрных механических деталей и электронных компонентов. Пьезоэлектрический схват содержит два пальца, выполненные в виде биморфных пьезоэлектрических актюаторов, закрепленных на корпусе и подключенных к управляющему устройству. Управляющее устройство содержит микроконтроллер, подключенный через порт связи к ЭВМ верхнего уровня, и цифроаналоговые преобразователи, которые подключены к каждому биморфному пьезоэлектрическому актюатору отдельно. Каждый палец содержит емкостной датчик, выполненный в виде закрепленной на корпусе параллельно пальцу диэлектрической пластины с металлизированной поверхностью, разделенной на два равных электрода, подключенных к ЭВМ верхнего уровня через преобразователь сигналов датчиков. Технический результат заключается в повышении точности микропозиционирования, надежности и быстродействия. 4 ил.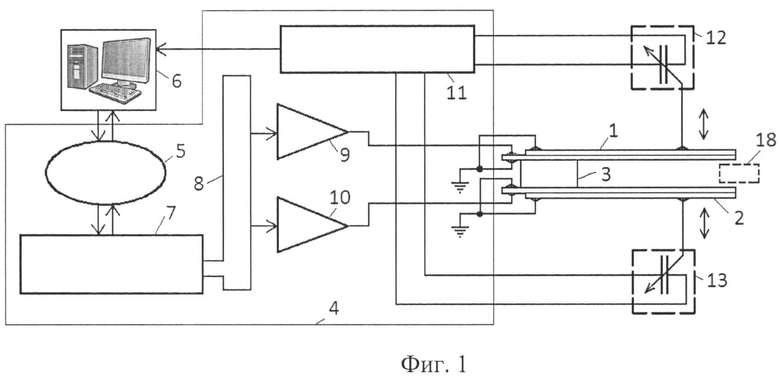
Пьезоэлектрический схват, включающий пальцы, закрепленные на корпусе и выполненные в виде биморфных пьезоэлектрических актюаторов, подключенных к управляющему устройству, содержащему микроконтроллер, подключенный через порт связи к ЭВМ верхнего уровня, и цифроаналоговые преобразователи, которые подключены к каждому биморфному пьезоэлектрическому актюатору отдельно, отличающийся тем, что каждый палец содержит емкостной датчик, выполненный в виде закрепленной на корпусе параллельно пальцу диэлектрической пластины с металлизированной поверхностью, разделенной на два равных участка с образованием электродов, подключенных к ЭВМ верхнего уровня через преобразователь сигналов датчиков.
| МЕХАТРОННЫЙ ПЬЕЗОЭЛЕКТРИЧЕСКИЙ СХВАТ | 2010 |
|
RU2425747C1 |
| CN 2761377 Y, 01.03.2006 | |||
| ПЬЕЗОЭЛЕКТРИЧЕСКИЙ МАНИПУЛЯТОР | 1999 |
|
RU2172239C2 |
| US 4610475 А, 09.09.1986; | |||
| Микроманипулятор | 1984 |
|
SU1202858A1 |
| Схват микроманипулятора | 1980 |
|
SU867646A1 |

