Настоящее изобретение относится к способу и устройству для определения углового положения ротора с постоянным магнитом многофазного электродвигателя, имеющего, по меньшей мере, две обмотки статора. Точное определение углового положения ротора электродвигателя желательно и даже необходимо во многих случаях применения, в частности в робототехнике и в имеющих вращающиеся части устройствах, используемых в стоматологии и в микрохирургии.
Для определения углового положения ротора с постоянным магнитом можно установить три датчика Холла, смещенные на 120° относительно друг друга, которые дают три синусоидальные кривые, сдвинутые по фазе на 120°. Можно также установить на оси ротора кодировщик положения, позволяющий осуществлять некоторую корректировку при определении углового положения ротора. Такая конструкция требует добавления датчиков, которые делают устройство более громоздким, что не подходит для устройств малых размеров, в которые вмонтированы микродвигатели.
Известен также генератор, выдающий сигналы о наведенном напряжении, амплитуда которого пропорциональна скорости вращения ротора. Так, применительно к трехфазному двигателю с постоянным магнитом можно периодически отключать питание двигателя на короткие интервалы времени с тем, чтобы иметь возможность получить информацию о наведенном напряжении, позволяющую определить положение ротора и/или его скорость. Этот последний метод определения углового положения ротора имеет существенные ограничения из-за того, что информация может быть получена только при величине скорости в некотором диапазоне около 1000 об/мин. При низкой скорости или при перемещении на относительно малые углы, используя наведенное напряжение в обмотке двигателя, нельзя получить какую-либо информацию об их значении.
В основу настоящего изобретения поставлена задача разработать способ определения углового положения ротора независимо от скорости его вращения и пройденного углового пути и устройство для осуществления этого способа, которое было бы достаточно компактным.
Поставленная задача решается тем, что в способе определения углового положения ротора многофазного электродвигателя с постоянным магнитом с, по меньшей мере, двумя обмотками статора согласно изобретению подают, по меньшей мере, один переменный сигнал на вход обмотки и снимают, по меньшей мере, один сигнал измерения с выхода этой обмотки.
При создании изобретения было установлено, что сигнал измерения содержит информацию, относящуюся к периодическим изменениям эффективной индуктивности обмотки, на которую подан переменный сигнал, и является функцией углового положения ротора с постоянным магнитом, в частности двухполюсного.
Поставленная задача решается также за счет создания электронного устройства для осуществления способа согласно изобретению.
При соответствующей обработке сигнала измерения способ согласно настоящему изобретению позволяет с хорошей точностью определить угловое положение ротора при любой скорости вращения и даже при останове. Благодаря этому способу можно управлять двигателем для осуществления его поворота на сравнительно малый угол с большой точностью.
Настоящее изобретение будет понятно из нижеследующего описания не ограничивающих вариантов осуществления способа согласно настоящему изобретению и устройств, обеспечивающих его осуществление, со ссылками на прилагаемые чертежи, на которых:
- фиг.1 изображает общую электрическую схему устройства для определения положения ротора;
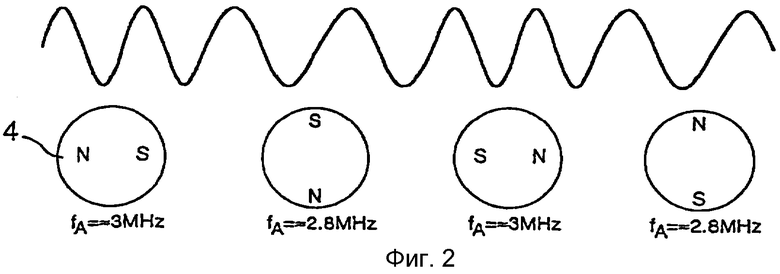
- фиг.2 - схематически изменение индуктивности в обмотке статора при изменении частоты в осцилляторе LC, соединенном с обмотками статора;
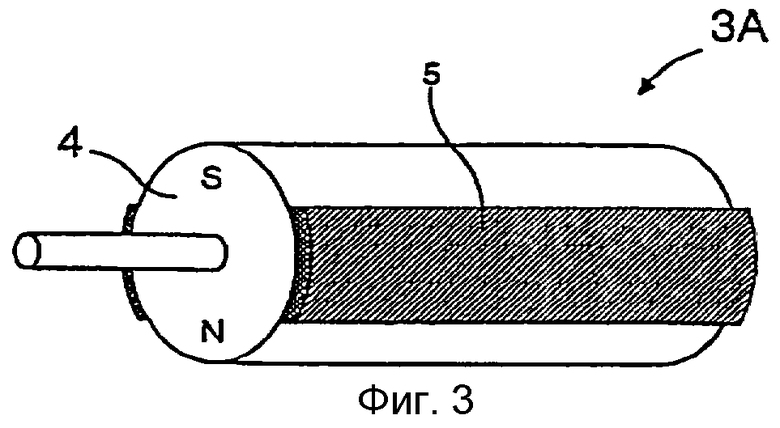
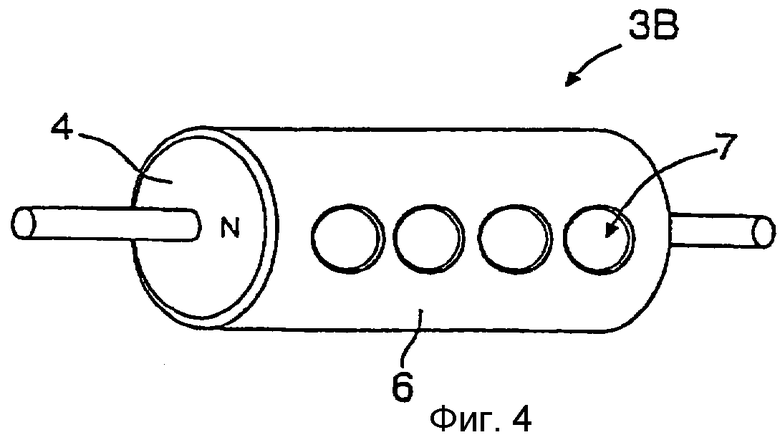
- фиг.3 и 4 - соответственно два варианта выполнения ротора, используемого в рамках настоящего изобретения;
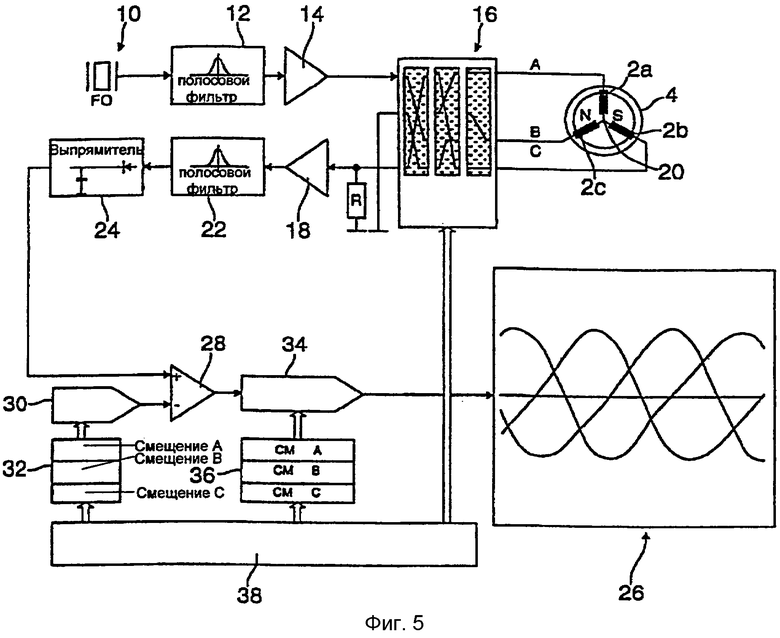
- фиг.5 - первый вариант осуществления устройства для определения углового положения ротора согласно изобретению;
- фиг.6-9 - второй вариант осуществления устройства согласно изобретению и предпочтительный вариант осуществления способа определения углового положения ротора согласно изобретению;
- фиг.10 - схематически контур коррекции кривых измерения, используемых в способе согласно изобретению;
- фиг.11-12 - метод выбора значения измерения из полученных трех сигналов измерения согласно изобретению;
- фиг.13 - первый вариант определения углового положения ротора в зависимости от выбранного значения сигнала измерения; и
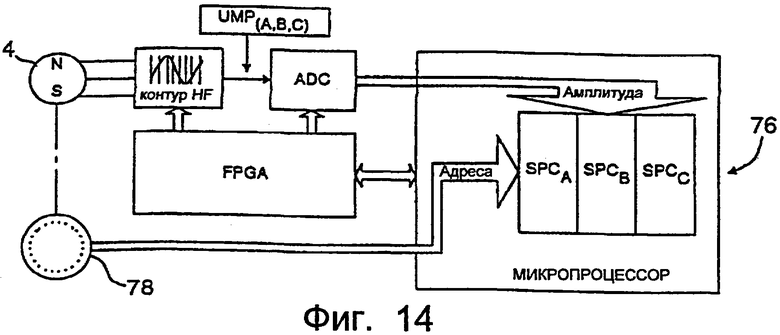
- фиг.14 - схематически устройство для осуществления второго варианта способа определения углового положения ротора в зависимости от выбранного значения сигнала измерения.
Электрический контур, изображенный на фиг.1, образует осциллятор LC, в котором индуктивность определяется обмотками 2а, 2b и 2с электродвигателя, ротор 3 которого содержит постоянный двухполюсный магнит 4. Контур, показанный на фиг.1, позволяет поддерживать колебания, частота которых изменяется, в частности, в пределах от 2,8 до 3 МГц в зависимости от положения ротора, как это схематически показано на фиг.2. Изменение частоты колебаний практически не зависит от скорости вращения ротора или значения силы тока, питающего двигатель. Следовательно, периодическое изменение эффективной индуктивности обмоток электродвигателя в основном зависит от положения ротора. Специалист может представить себе электрический контур для измерения частот осциллятора, представленного на фиг.1, для получения информации относительно углового положения ротора. Международная заявка WO 00/04631 того же изобретателя описывает использование измерения изменения частоты двух осцилляторов, присоединенных к обмотками статора. Более подробное описание электрического контура по фиг.1 приведено также в заявке на европейский патент ЕР 99125017.6, по которой истребуется приоритет. В этой заявке на европейский патент описаны также способы изготовления роторов, таких как показаны на фиг.3 и 4, использование которых позволяет увеличить периодические изменения эффективной индуктивности обмоток в зависимости от углового положения ротора.
На фиг.3 и 4 представлены два варианта осуществления ротора 3А и 3В, являющегося частью электродвигателя, к которому присоединено устройство определения углового положения ротора согласно изобретению. Было установлено, что частичное расположение немагнитного металла на поверхности постоянного магнита ротора позволяет увеличить периодическое изменение эффективной индуктивности обмоток статора. Ротор 3А имеет две металлические ленты 5, расположенные диаметрально противоположно, одна из двух лент изображена на фиг.3. Ротор 3В имеет окружающий постоянный магнит 4, металлический цилиндр 6, в котором предусмотрены два ряда отверстий 7, расположенных вдоль оси диаметрально противоположно один другому. В данном варианте, представленном в качестве неограничивающего примера, магнитная ось S-N направлена радиально к отверстиям 7.
Со ссылками на фиг.5 ниже описан первый вариант способа согласно изобретению и устройства для его осуществления.
С помощью генератора 10 частоты через полосовой фильтр 12, имеющий определенную частоту, выдают переменный сигнал, который поочередно поступает на вход одной из трех обмоток статора 2а, 2b и 2с. Затем принимают сигнал измерения посредством другой обмотки, соединенной с выходом той обмотки, на которую был подан прерывистый сигнал. Этот сигнал измерения передают на средства электронной обработки, включающие усилитель 18, на входе в который установлено сопротивление R. Учитывая, что полное входное сопротивление усилителя 18 очень высокое, сопротивление R меньшего значения служит для снижения полного сопротивления на входе в этот усилитель 18, чтобы избежать появления паразитных шумов в сигнале измерения. Необходимо отметить, что сопротивление R значительно превышает сопротивление одной обмотки статора таким образом, что сигнал напряжения, формирующий сигнал измерения на входе в усилитель 18, точно соответствует сигналу напряжения, имеющему частоту вышеупомянутого прерывистого сигнала в средней точке 20 трех обмоток статора.
Для получения отфильтрованного сигнала измерения он проходит через полосовой фильтр 22, на выходе из которого получают переменный сигнал, огибающая которого модулирована в зависимости от углового положения ротора. Для извлечения информации, относящейся к угловому положению ротора, сигнал измерения известным из-за уровня техники образом пропускают через выпрямитель 24 для получения электрического сигнала, соответствующего вышеупомянутой огибающей. Поскольку переменный сигнал подают последовательно циклически на три фазы А, В и С электродвигателя, то получают при вращении ротора три сигнала измерения, которые определяют три кривые, имеющие по существу синусоидальную форму и сдвинутые по фазе на 120°, как показано на графике 26. Учитывая, что три обмотки статора не всегда идентичны, часто полученные три кривые сигналов измерения имеют несколько различные сдвиги фаз и амплитуды. В этой связи в устройстве предусмотрены средства, позволяющие корректировать сдвиг фазы и амплитуду каждой кривой. Эти средства включают накопительный операционный усилитель 28, на один вход которого подают сигнал измерения, тогда как на второй вход через аналого-цифровой преобразователь 30 подают сигнал смещения, специфический для каждой из трех фаз А, В и С. Специфический сдвиг каждой из фаз, на которых осуществляют измерение, запоминают в регистре 32. Сигнал измерения подают в аналого-цифровой преобразователь-усилитель 34, коэффициент усиления которого СМ выбирают соответствующим образом для каждой из трех фаз из регистра 36. Приведение в действие аналогового прерывателя 16 и выбор сдвига и коэффициента усиления СМ производят одновременно циклическим образом с помощью электронного контроллера 38.
С помощью трех кривых сигнала измерения можно точно определить угловое положение ротора. В случае, когда кривые по существу синусоидальны, такое определение может быть выполнено достаточно точно численными методами. Если же это не так, то можно использовать методы, позволяющие эффективно определять угловое положение ротора, которые описаны ниже в рамках предпочтительного варианта осуществления изобретения.
Описанное выше устройство для осуществления способа определения углового положения ротора согласно изобретению обладает некоторыми недостатками. В частности, электрические контуры, позволяющие получить кривые измерения, имеющие один и то же сдвиг фазы и одну и ту же амплитуду, являются сравнительно сложными. Кроме того, вспомогательные механизмы, в частности электрические провода, соединяющие двигатель с устройством, иногда искажают измерение значений амплитуды и сдвига кривых сигнала измерения. Поэтому далее описан другой предпочтительный способ по настоящему изобретению, в котором используют фазовую модуляцию и соответствующее электронное устройство для его осуществления.
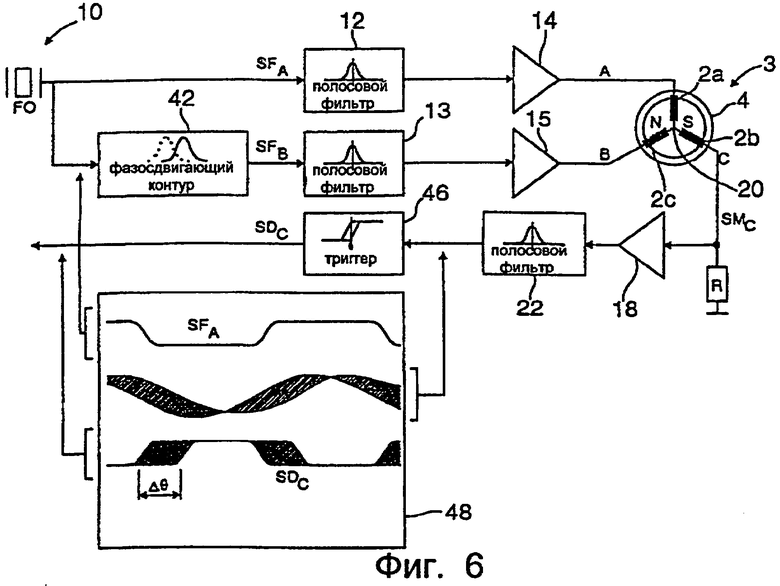
По предпочтительному варианту способа по настоящему изобретению, который будет описан далее со ссылками на фиг.6-10, предусмотрено одновременно подавать первый сигнал SFA на первую фазу двигателя, т.е. на первый вход обмотки статора, и второй прерывистый сигнал SFB той же частоты F0 на вторую фазу, т.е. на вход второй обмотки. Сигнал SFB смещен по фазе по отношению к сигналу SFA посредством фазосдвигающего контура 42. Сдвиг по фазе между двумя прерывистыми сигналами предварительно задан. Сигналы SFA и SFB подают на входы двух обмоток через полосовые фильтры 12 и 13 и усилители 14 и 15, как и в описанном выше первом варианте исполнения.
Используя третью катушку, соединенную с третьей фазой двигателя, снимают сигнал измерения SMC, который подают на средства электронной обработки, а именно на преобразователь для получения информации, являющейся функцией периодического изменения индуктивности в зависимости от углового положения ротора. Сигнал измерения SMC формируют путем слияния сигналов, полученных в точке 20 электрического соединения трех обмоток статора. В ответ на первый и второй сигналы SFA и SFB получают, следовательно, сигнал измерения напряжения с частотой, соответствующей частоте F0 этих сигналов SFA и SFB. Сигнал SMC усиливают и фильтруют на частоте F0 перед передачей на триггер 46, который передает затем цифровой сигнал SDC, отображающий сигнал измерения SMC.
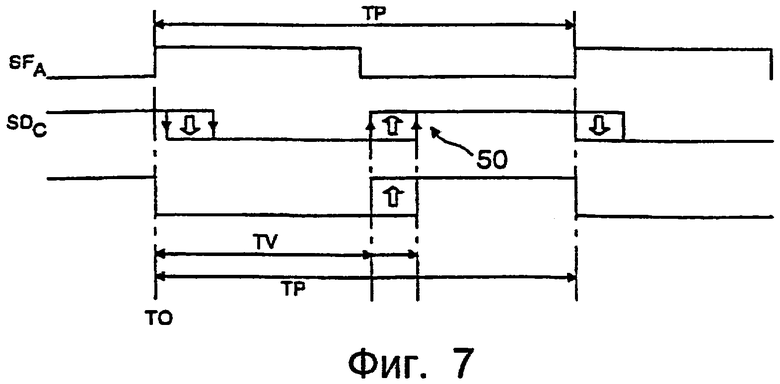
В окне 48 представлены подаваемый сигнал SFA и огибающая усиленных сигналов измерения SMC за один полуоборот двухполюсного магнита 4 ротора 3. Фаза сигнала SMC no отношению к переменному сигналу SFA изменяется в зависимости от углового положения α ротора между двумя экстремальными значениями, определяющими максимальный сдвиг фаз Δθ. Триггер 46, дискретизируя строго синусоидальные кривые сигнала SMC, позволяет измерить изменение фазового сдвига между поданным сигналом SFA и сигналом измерения SMC, как это схематически показано на фиг.7. Переменный сигнал SFA имеет период ТР, восходящий участок которого определяет начальное время Т0 отсчета. Дискретизированный сигнал измерения SDC показывает восходящую ветвь 50, появляющуюся через прерывистый интервал времени TV после начального времени Т0.
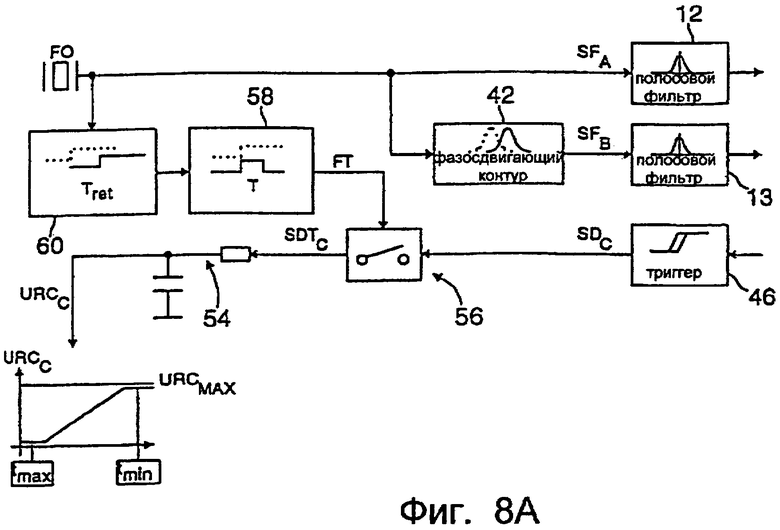
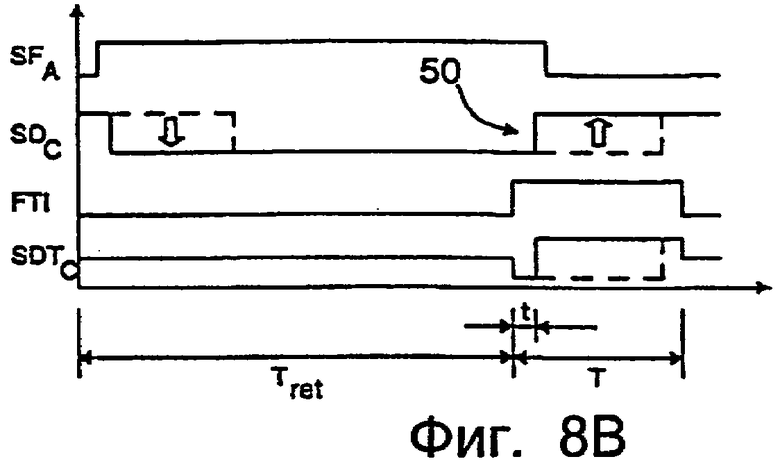
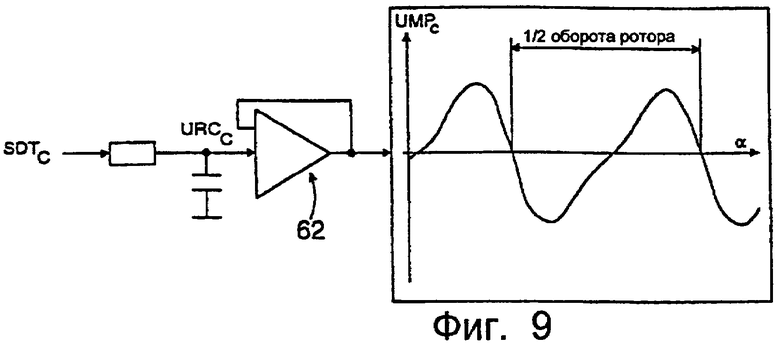
Именно изменение интервала TV содержит информацию об изменении эффективной индуктивности. Для наилучшего использования этой информации предусмотрены два измерения, как представлено на фиг.8А. В первую очередь предусмотрен контур RC54, служащий для подачи напряжения, пропорционального отношению TV/TP. Для увеличения изменения сигнала напряжения URCC дополнительно предусмотрен переключатель 56 тройного положения для фиксации изменения положения восходящей ветви 50 на время, выставленное во временном окне Т, значение которого незначительно превышает максимальное изменение TV. Таким образом, изменение сигнала URCC изменяется существенным образом между малым значением и значением, близким к URCMAX. Временное окно вступает в действие через заранее определенное время запаздывания Tret. Переключатель 56 тройного положения приводят в действие управляющим сигналом FT, подаваемым контуром запаздывания 60 через контур 58. Контуры 58 и 60 известны из уровня техники. На фиг.8В представлены различные сигналы, используемые при обработке сигнала измерения для определения изменения его фазы. Средства электронной обработки фактически образуют фазовый детектор и выдают сигнал напряжения, изменение которого соответствует изменению фазы сигнала измерения SMc. Кроме того, как показано на фиг.9, сигнал URCC подают на операционный усилитель 62, имеющий меньшее сопротивление на выходе. В результате получают переменный сигнал UMPC, зависящий от углового положения ротора и имеющий период, соответствующий одному полуобороту ротора. Измененный и обработанный сигнал позволяет получить кривую, показывающую периодическое изменение и имеющую форму, приближающуюся к синусоидальной кривой.
Осуществляемый контуром 42 фазовый сдвиг между двумя поданными для измерения сигналами имеет значение преимущественно между 140 и 160°. Этот диапазон значений соответствует оптимальному соотношению между изменением фазы сигнала измерения и его напряжением.
Для эффективного измерения углового положения ротора и, в особенности, направления его вращения необходимо получить не менее двух кривых измерения, сдвинутых по фазе одна относительно другой. Для их получения действуют аналогично первому варианту исполнения, описанному ранее со ссылкой на фиг.5. Подают первый и второй переменные сигналы циклически последовательно на две из трех обмоток статора так, чтобы получить три сигнала измерения, изменение которых в зависимости от положения ротора определяет соответственно три кривые, сдвинутые по фазе на 120° одна относительно других. В настоящем варианте снимают последовательно сигналы измерения с каждой из трех фаз А, В и С, подавая оба переменных сдвинутых по фазе сигнала на две другие фазы. Из уровня техники известны контуры, позволяющие получить последовательно циклическим образом в сравнительно короткие интервалы времени все три сигнала измерения на выходы трех обмоток статора, определяя все три фазы электродвигателя. Для этого можно использовать, в частности, операционные усилители с переключателем тройного положения с высоким полным сопротивлением, например, типа CLC430, производимого компанией "Насьональ". Такая схема может управляться переключающим контуром "FPGA" (Field Programmable Gate Array - программируемая пользователем вентильная матрица) типа ХС4008, производимым компанией "Ксилинкс".
Таким образом, для каждой угловой позиции ротора можно получить три сигнала измерения. При вращении ротора при помощи последовательных измерений три периодические кривые измерения, генерируемые модуляцией фаз или вариацией фазового сдвига этих сигналов измерения в трех обмотках электродвигателя в зависимости от углового положения постоянного магнита ротора.
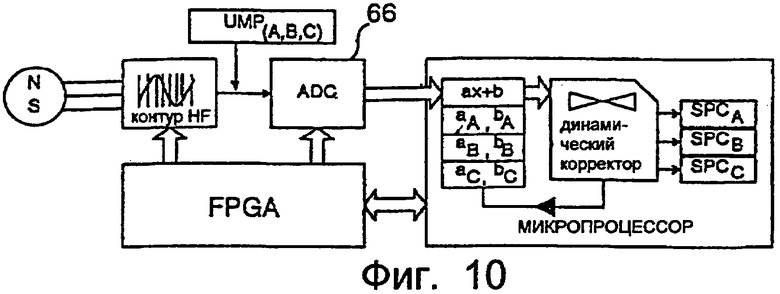
Учитывая незначительную несимметричность трех фаз, предлагается с помощью динамического корректора исправлять сигналы измерения для того, чтобы полученные кривые измерения имели бы один и тот же сдвиг и одну и ту же амплитуду (см. фиг.10). Для этого сигнал UMP, выдаваемый каждой из трех фаз, подают в преобразователь 66, управляемый также упомянутым выше переключающим контуром FPGA. Динамическую коррекцию осуществляют с помощью микропроцессора, который выдает исправленные значения измерений SPC для каждой из трех фаз. Таким образом получают, как показано на фиг.11, три кривые SPCA, SPCB и SPCC с фазовым сдвигом в 120°.
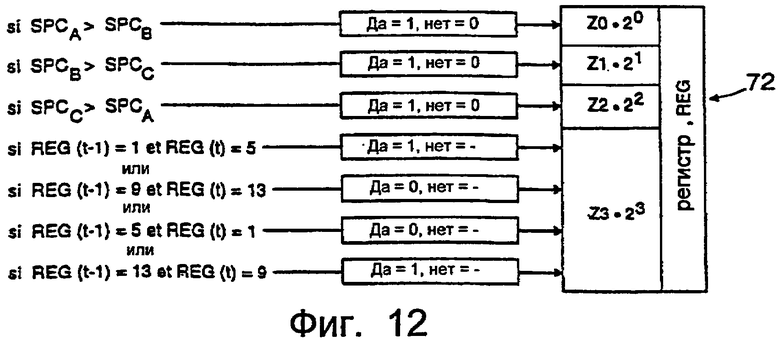
В рамках настоящего изобретения был разработан метод точного и эффективного определения положения ротора. Этот метод будет изложен далее со ссылками на фиг.11-14. В зоне вершины кривых измерения вследствие сравнительно малого их наклона точность измерения снижается. Чтобы исключить эти зоны, согласно изобретению предусмотрено среди всех трех сигналов измерения выделить для данного положения ротора такой сигнал измерения, значение которого расположено между значениями двух других сигналов измерения или равно значению одного из этих двух других сигналов измерения. Таким образом, для данного углового положения отбирают только одно значение измерения, расположенное на сегменте зигзагообразной кривой 70, показанной жирной линией на фиг.11. За один полуоборот ротора угловое положение определяют однозначно с помощью приведенного на фиг.12 в первых трех строках алгоритма выбора сегмента кривой 70. Полученное по данному сегменту кривой 70 значение измерения, отвечающее определенной фазе, может соответствовать двум угловым положениям в зависимости от полуоборота. Для этих двух угловых положений значения сигналов измерения расположены соответственно ниже и выше вышеупомянутого кривой 70. Четыре последних условия в приведенном на фиг.12 алгоритме позволяют определить вид сегмента зигзагообразной кривой 70 для данного положения ротора с учетом временного изменения сигналов измерения. В памяти сохраняют помещенное в регистр 72 в момент времени t-1 значение REG и наблюдают изменение значения REG за время t, что позволяет различать два последовательных полуоборота по состоянию логического бита z3. Угловое положение ротора можно определить однозначным образом по значению измерения, выбранному на одном из сегментов кривой 70, когда определен, как это показано на кривой 74 фиг.11, вид этого сегмента кривой 70.
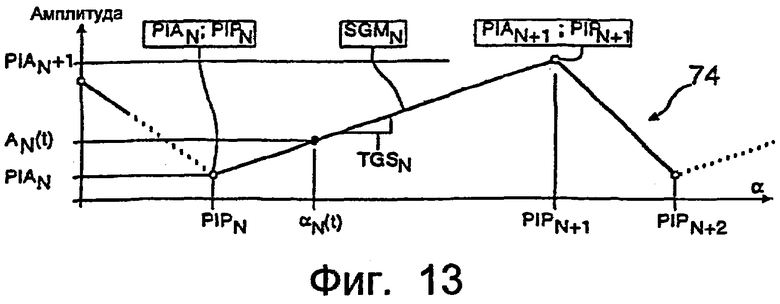
Для определения значения углового положения ротора по значению измерения, выбранному по зигзагообразной кривой 70, предложено два варианта. Первый вариант - это аналитический метод, представленный схематически на фиг.13. Для конкретного типа электродвигателя с помощью аналитической формулы задают эталонную зигзагообразную кривую, соответствующую кривой 70.
В этом варианте зигзагообразная эталонная кривая 74 образована последовательностью линейных сегментов, являющихся аппроксимацией соответствующей реальной кривой. Таким образом, сегменты кривой 70 представлены на эталонной кривой линейными сегментами, параметры которых определены, например, при помощи линейной апроксимации по реальным кривым измерения, полученным для конкретного типа двигателя. Для каждого линейного сегмента SGMN N-го вида крайние точки (PIPN; PIAN) и (PIPN+1; PIAN+1) и наклон TGSN определены заранее и введены в средства электронной обработки. Для сегмента, вид N которого определен, угловое положение αN(t) в зависимости от значения измерения AN(t) задано следующей аналитической формулой:

Второй вариант для определения углового положения - это сравнительный метод. Предусмотрено ввести в таблицу 76 соответствия множество эталонных значений, определяющих эталонную кривую за, по меньшей мере, один полуоборот ротора. Каждому эталонному значению соответствует заранее определенное значение углового положения ротора, также записанное в таблицу 76. После того как сегмент кривой 70 определен, угловое положение получают, определяя, каково эталонное значение является наиболее близким к выбранному значению измерения.
Для получения вышеупомянутых эталонных значений можно использовать кодировщик 78 положения и кривые UMP, полученные для каждой фазы путем цифрового преобразования посредством преобразователя 80, как схематически показано на фиг.14.
Следует отметить, что хотя варианты осуществления способа согласно изобретению были приведены со ссылками на двигатель, у которого обмотки статора соединены в виде звезды, описанный способ применим также для двигателя с подключением обмоток статора в виде треугольника.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ БЕЗДАТЧИКОВОГО ОПРЕДЕЛЕНИЯ НАЧАЛЬНОГО ПОЛОЖЕНИЯ РОТОРА СИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ С ПОСТОЯННЫМИ МАГНИТАМИ | 2015 |
|
RU2594358C1 |
| Индуктивный абсолютный преобразователь угловых перемещений | 2021 |
|
RU2788423C2 |
| Способ регулирования многофазной электрической машины и система многофазной электрической машины для такого способа | 2021 |
|
RU2773000C1 |
| Способ регулирования датчика угловых перемещений | 1989 |
|
SU1781672A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ ПЕРЕМЕННОГО ТОКА | 2021 |
|
RU2775819C1 |
| Способ определения частотной характеристики проводимости асинхронной машины | 1990 |
|
SU1780062A1 |
| ЭЛЕКТРИЧЕСКИЙ ПРИВОД И СПОСОБ УПРАВЛЕНИЯ ИМ | 2008 |
|
RU2477561C2 |
| Способ возбуждения механических автоколебаний | 2019 |
|
RU2725897C1 |
| СПОСОБ ДИАГНОСТИКИ МЕХАНИЗМОВ И СИСТЕМ С ЭЛЕКТРИЧЕСКИМ ПРИВОДОМ | 2009 |
|
RU2431152C2 |
| СПОСОБ СТАБИЛИЗАЦИИ ЧАСТОТЫ ВРАЩЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕЙ ПЕРЕМЕННОГО ТОКА (ВАРИАНТЫ) | 2000 |
|
RU2164053C1 |

Изобретение относится к области электротехники и может быть использовано в робототехнике, стоматологии и в микрохирургии. Техническим результатом является определение углового положения ротора независимо от скорости его вращения и пройденного углового пути и упрощение устройства. В способе и устройстве для определения углового положения ротора многофазного электродвигателя с постоянными магнитами подают первый переменный сигнал определенной частоты на вход, по меньшей мере, одной из обмоток статора и снимают сигнал измерения на выходе этой обмотки, сигнал измерения обрабатывают средствами электронной обработки с обеспечением извлечения информации о периодическом изменении эффективной индуктивности обмотки статора. Это изменение является функцией углового положения ротора. Осуществляя попеременно такие измерения на обмотках статора, получают три периодических кривых, определяющих зигзагообразную кривую, позволяющую точно определить угловое положение ротора. 2 н. и 12 з.п. ф-лы, 14 ил.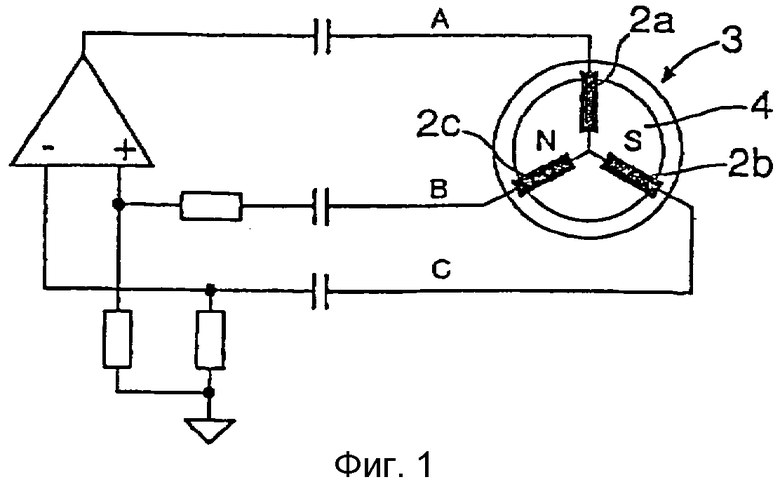
| ДРАЙВЕР ДВИГАТЕЛЯ | 1993 |
|
RU2054787C1 |
| УПРАВЛЯЕМЫЙ ВЕНТИЛЬНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 1994 |
|
RU2091978C1 |
| Вентильный электродвигатель | 1990 |
|
SU1774455A1 |
| Устройство для формирования импульсов управления вентильным преобразователем | 1986 |
|
SU1387131A1 |
| US 4080533 A, 21.03.1978 | |||
| Способ передачи сообщения через вычислительную сеть с применением аппаратуры квантового распределения ключей | 2019 |
|
RU2697696C1 |
| ЕР 0793337 А, 03.09.1997 | |||
| WO 9219038 А, 29.10.1992. | |||

