Изобретение относится к области измерений индукции магнитного поля (МП), в частности МП корабля (МПК).
Контролем МПК занимается специальная магнитометрия, в которой применяются группы трехкомпонентных измерительных магнитометров, включенных по дифференциальной (разностной) схеме относительно опорного (компенсационного) магнитометра. Дифференциальное включение требуется для того, чтобы исключить влияние МП Земли (МПЗ) на результаты измерения МПК. При этом, как правило, датчики таких магнитометров располагаются в труднодоступных местах, что затрудняет их ориентацию вдоль опорной системы координат (СК).
Среди специалистов проблема углового согласования (УС) таких магнитометров относительно опорной СК традиционно считалась трудноразрешимой, что неоднократно подчеркивалось в публикациях, в частности:
- наименьшая погрешность установки датчиков на подводном стенде водолазом по компасу составляет ±5°, тогда как требуемое УС измерительного датчика с опорной СК должно быть не хуже 35 угловых минут [1. B.J. Marshall. Operational Aspects of Magnetic Measurement Ranges. Naval Forces 1989, V 10, #2, P 72-78];
- стоимость геодезических и подводных работ по ориентации каждого трехкомпонентного датчика при установке на его штатном месте, составляет значительную часть стоимости затрат за весь срок службы магнитоизмерительного стенда 2-го поколения [2. Matthews D.C. Contemporary degaussing measuring ranges. Maritime Defence 1979, V 4, #12, P 499-503].
Различают стенды 1-го поколения (1950 -1970 г.) с однокомпонентными датчиками на кардановых подвесах; 2-го поколения (после 1970 г.), использующих 12-18 трехкомпонентных датчиков на кардановых подвесах; 3-го поколения (с конца 1986 г), на которых используются 2-4 трехкомпонентных датчика без кардановых подвесов. Примером стенда 3-го поколения является стенд MS90 [3. More efficient degaussin gatless cost. Maritime Defence 1988, V 13, #7].
Угловая несогласованность датчиков является, по-видимому, самым плохо контролируемым источником систематической погрешности дифференциальных магнитометров на стендах 2 и 3 поколений.
Известен способ [4. Способ углового согласования трехкомпонентных магнитометров на кардановых подвесах. Патент РФ №2256188], из названия которого следует, что способ [4] не пригоден для стендов 3 поколения, где нет кардановых подвесов.
Известен также способ компенсации вариаций МПЗ, описанный в монографии [5. John J. Holmes. Exploitation of a Ship's Magnetic Field Signatures. Morgan & Claypool. 2006. P. 51]. Способ [5] основан на использовании данных вариационной станции, удаленной от испытуемого измерительного датчика. Проверка способа [5] с помощью компьютерного моделирования вариаций МПЗ показала, что он очень критичен к уровню СКО короткопериодных вариаций МПЗ. Например, при СКО вариаций 3 нТл погрешность согласования составляет 15%, при 4 нТл - 5%, при 5 нТл - 0.2%. Но согласно литературным данным амплитуды короткопериодных вариаций в спокойные периоды на широте Санкт-Петербурга лежат в диапазоне менее 3 нТл. Это амплитуды. СКО этих оценок были бы раза в три меньше.
Известен способ, обеспечивающий значительное повышение точности обычной трехкомпонентной магнитометрии [6. Способ калибровки трехкомпонентного магнитометра, Патент РФ №2497139. См. также Иванов Ю.М., Семенов В.Г. Корректирующие матрицы - путь к повышению точности трехкомпонентных магнитометров // Измерительная техника. 2013. №6. С. 46-51]. Способ [6] включает построение собственной ортогональной системы координат (COCK) для неортогонального магнитометра. Но способ [6] не является способом калибровки дифференциального магнитометра, хотя и создает удобную отправную точку для такой калибровки.
В результате анализа перечисленных выше технических решений по совокупности существенных признаков в качестве ближайшего аналога заявляемого способа принят способ [6].
Известный способ калибровки трехкомпонентного магнитометра включает предварительное (то есть, до установки на его штатном месте) определение его уходов нулей и его корректирующей матрицы в его COCK.
Причиной, препятствующей достижению указанного ниже технического результата при использовании известного способа, является то, что он не является способом калибровки дифференциального магнитометра.
Задача, на решение которой направлено заявляемое изобретение, заключается в повышении точности УС дифференциального магнитометра.
Технический результат, получаемый при осуществлении изобретения, заключается в обеспечении калибровки дифференциальных магнитометров с датчиками без кардановых подвесов, то есть в расширении функциональных возможностей калибровки стендов, включая стенды 3 поколения.
Указанный технический результат достигается тем, что заявляемый способ калибровки трехкомпонентного магнитометра, включающий предварительное определение его уходов нулей и корректирующей матрицы в его COCK отличается тем, что калибруют измерительный и компенсационный каналы дифференциального магнитометра, которыми после установки на штатных местах синхронно измеряют однородное МПЗ, из сопоставления скорректированных результатов измерения которого находят ортогональную матрицу связи между COCK того и другого каналов.
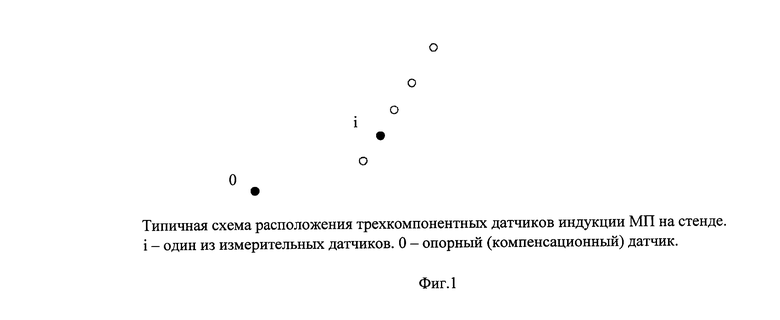
На Фиг. 1 изображена типичная схема расположения трехкомпонентных датчиков индукции МП на измерительном стенде. На этой схеме i - один из измерительных датчиков, 0 - единый опорный (компенсационный) датчик. Каждая пара датчиков i и 0 образует дифференциальный магнитометр, подлежащий калибровке.
В известном способе [6] результат измерения трехкомпонентным магнитометром представляют как искажение действительного значение вектора МИ некоторой 3×3 матрицей, называемой искажающей

где (В-O)ui - вектор-столбец результата измерения i-магнитометра (см. Фиг. 1), исправленный на его уходы нулей; ui - искажающая матрица i-магнитометра в его COCKi;
Bi - вектор-столбец действительного значения МИ в точке i в COCK;.
Аналогично обозначают результат измерения опорным магнитометром 0
(В-О)u0=u0⋅B0
где (В-О)u0 - вектор-столбец результата измерения опорным магнитометром 0, исправленный на его уходы нулей; u0 - искажающая матрица опорного магнитометра в его СОСК0; В0 - вектор-столбец действительного значения МИ в точке 0 в СОСК0. Дополнительные пояснения к COCK даны ниже.
Искажающую любого магнитометра выражают произведением диагональной матрицы L на матрицу единичных осей l
где La - безразмерные величины, близкие к единице, а=1, 2, 3;
lа - единичные вектор-строки осей магнитометра.
Матрица L инвариантна к выбору СК, а матрица l зависит от него. Если выбрать ортогональную СК (ОСК) так, чтобы ее орт 1 совпал с осью l1, а орт 2 оказался в плоскости осей l1 и l2, то в такой ОСК матрица l примет вид треугольной, ненулевые элементы которой можно выразить через 1 и неортогональности ее осей

где  ;
;  ;
;  - неортогональности осей данного магнитометра;
- неортогональности осей данного магнитометра;
Т - символ транспонирования вектор-строки в вектор-столбец;

Эта ОСК является собственной для данного магнитометра, поскольку она жестко связана с его (неортогональными) осями. Следует отметить, что понятие COCK ранее предложено в работе [7. Merrayo J.M.J, е.а. Scalar calibration of vector magnetometers // Meas. Sci. Technol. 2000. V. 11. Р. 120-132]. В [7] разработан быстрый, точный и помехоустойчивый метод определения неортогональностей ϕ12, ϕ13, ϕ23, величин La, и уходов нулей магнитометра с помощью трехкомпонентной меры магнитной индукции, что позволяет определить искажающую i-магнитометра в СОСКi и опорного магнитометра в СОСК0.
В итоге последующие результаты измерения (1) корректируют и получают действительное значение индукции в точке i в СОСКi

где  - обратная искажающей i-магнитометра или его корректирующая матрица в СОСКi. Обратим внимание на то, что результат измерения i-магнитометром (В-О)ui не зависит от СОСКi., так как магнитометр «не знает», какую СОСК мы выбрали.
- обратная искажающей i-магнитометра или его корректирующая матрица в СОСКi. Обратим внимание на то, что результат измерения i-магнитометром (В-О)ui не зависит от СОСКi., так как магнитометр «не знает», какую СОСК мы выбрали.
Аналогично корректируют результат измерения опорным магнитометром для получения действительного значения индукции в точке 0 в СОСК0

где  - корректирующая матрица опорного магнитометра в СОСК0.
- корректирующая матрица опорного магнитометра в СОСК0.
Для измерения дифференциальным магнитометром требуется дополнительное выражение индукции в точке i в СОСК0.

где si0 - (неизвестная) матрица ортогонального преобразования координат из СОСК0 в СОСКi;  - действительное значение индукции в точке i в СОСК0; s0i - обратная или транспонированная si0 (одно из свойств ортогональной матрицы заключается в том что ее транспонированная и обратная совпадают).
- действительное значение индукции в точке i в СОСК0; s0i - обратная или транспонированная si0 (одно из свойств ортогональной матрицы заключается в том что ее транспонированная и обратная совпадают).
С помощью соотношений (4)-(6) составим скорректированное уравнение измерения дифференциальным магнитометром i0, обозначенным на Фиг. 1.

где  - скорректированная в СОСК0 разность индукций МП объекта в точках i и 0;
- скорректированная в СОСК0 разность индукций МП объекта в точках i и 0;
 ,
,  - соответствующие части результатов измерения МП объекта в точках i и 0;
- соответствующие части результатов измерения МП объекта в точках i и 0;  ,
, - соответствующие части результатов измерения МПЗ в точках i и 0.
- соответствующие части результатов измерения МПЗ в точках i и 0.
Как следует из выражения (7), при удаленном объекте и синхронном измерении однородного МПЗ в точках i и 0

где вектор-столбцы Вi, В0 известны в результате измерений и последующих коррекций.
Матрицу S0i можно выразить последовательным произведением элементарных матриц поворота. Например, поворотом на угол x1 вокруг орта 1, затем на угол x2 вокруг орта 2, затем на угол х3 вокруг орта 3 [8. Андре Анго. Математика для электро- и радиоинженеров. М. Наука. 1965 г. С. 187]
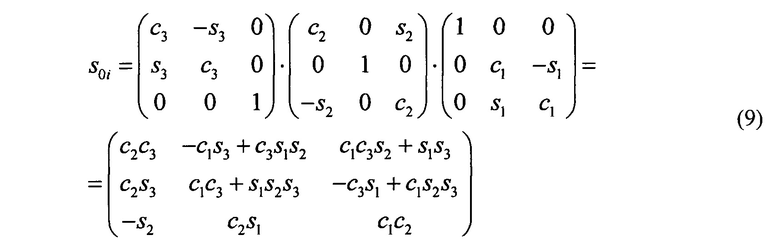
где са=cosxa, sa=sinxa, а=1, 2, 3
Итак, (8) представляет собой систему трех нелинейных уравнений относительно трех неизвестных углов x1, x2, x3. Для решения нелинейных систем в пакете Матлаб разработана программа "fsolve". Но для системы (8)+(9) программа неизменно выдавала физически неприемлемые значения углов (ха>50, 50=0.087).
В этой связи опробован упрощенный аналог (9), учитывающий близость са к единице и sa к нулю

где  , а, b, с=1, 2, 3, а≠b≠с.
, а, b, с=1, 2, 3, а≠b≠с.
Кроме того, результаты решения систем зависели от выбора начальных данных х0.
Поэтому целесообразно контролировать решения оценкой погрешности УС в виде

где х=(x1 x2 x3) - результаты решения системы уравнений (8)+(10).
Для иллюстрации всего процесса решения (8)-(11)проведено его компьютерное моделирование для конкретного примера УС:
В0=(0.2097 0.0203 0.4945)⋅10-4, Bi=(0.22 0.02 0.49)⋅10-4
x1=0.01, х2=-0.02, х3=0.025.
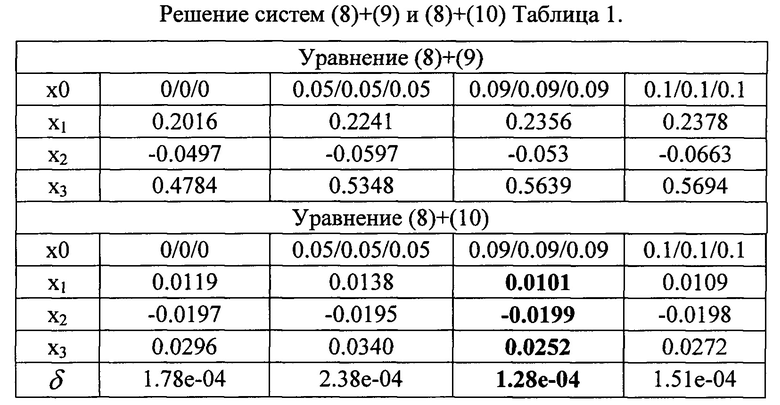
Как видно из таблицы, точная система (8)+(9) дает физически неприемлемые решения (углы > 50), а «неточная» система (8)+(10) дает углы, близкие к точным. Это оправдывает упрощение (10). Оценка (11) для (8)+(10) отслеживает точность решения и указывает на наиболее точное из полученных решений (выделено полужирным шрифтом):

Дальнейшее уточнение матрицы УС достигается подстановкой (12) в (8), при этом минимум (11) снижается от 1.28е-04 до 9.45е-05.
Сравним погрешности УС (8)-(10), (8)-(12) с вариантом без УС.


Таким образом, в заявляемом способе с помощью выражений (8)-(12) находят ортогональную матрицу s0i, обеспечивающую УС каналов дифференциального магнитометра i0 при измерении по уравнению (7). При этом заявляемый способ снижает погрешность УС каналов более чем в 200 раз (см. Таблицу 2).
Изобретение относится к области измерения магнитной индукции дифференциальным магнитометром, включающим измерительный и компенсационный каналы. Сущность изобретения заключается в том, что с помощью меры магнитной индукции калибруют каждый канал в его собственной ортогональной системе координат, а после установки каналов на штатных местах находят ортогональную матрицу связи между системами координат каналов через сопоставление синхронных откорректированных результатов измерения однородного МПЗ. Технический результат – повышение точности калибровки дифференциального магнитометра, включая вариант с датчиками без кардановых подвесов. 1 ил., 2 табл.
Способ калибровки трехкомпонентного магнитометра, включающий предварительное определение его уходов нулей и корректирующей матрицы в его собственной ортогональной системе координат (СОСК), отличающийся тем, что калибруют измерительный и компенсационный каналы дифференциального магнитометра, которыми после установки на штатных местах синхронно измеряют однородное МПЗ, из сопоставления скорректированных результатов измерения которого находят ортогональную матрицу связи между СОСК того и другого каналов.
| СПОСОБ КАЛИБРОВКИ ТРЕХКОМПОНЕНТНОГО МАГНИТОМЕТРА | 2012 |
|
RU2497139C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КАЛИБРОВОЧНОЙ МАТРИЦЫ ТРЕХКОМПОНЕНТНОГО МАГНИТОМЕТРА (ВАРИАНТЫ) | 2003 |
|
RU2262711C2 |
| WO 2012068362 A2, 24.05.2012 | |||
| WO 2010071990 A1, 01.07.2010. | |||

