Изобретение относится к радиотехнике, а более конкретно к радиолокации, и может быть использовано для измерения высоты полета летательных аппаратов различных классов на малых и сверхмалых высотах при заходе на посадку, в том числе в беспилотном режиме.
В настоящее время известны способы измерения высоты полета летательных аппаратов с использованием радиовысотомеров с импульсной модуляцией, которые применяются для измерения больших высот преимущественно в военной авиации, в космонавтике, при аэрофотосъемке и для других специальных целей; радиовысотомеров с частотной модуляцией, которые имеют диапазон измерений до нескольких сотен метров и используются в основном при заходе самолета на посадку (а. с. №1300531, №1663590; патенты RU №2111505, №2124760, №2126979, №2131622, №2150752, №2282211; патенты USA №3714654, №48925213, №4495580, №5132693; патент DE №1917140; патент FR №2037222).
Недостатки способов измерения высоты полета летательных аппаратов на малых и сверхмалых высотах при заходе на посадку с применением указанных радиовысотомеров в том, что они обладают недостаточной чувствительностью; для измерений высот используют частотно-модулированные сигналы, частота которых изменяется по синусоидальному, пилообразному, треугольному и другим законам частотной модуляции; способ не может использоваться для измерения высоты полета летательных аппаратов различных классов на малых и сверхмалых высотах при заходе на посадку, для «слепой» посадки и посадки в беспилотном режиме точность радиовысотомеров такого типа недостаточна.
Наиболее близким по технической сущности и достигаемому результату является способ измерения малых и сверхмалых высот, по которому используют излучение передающей антенной зондирующего сигнала передатчика, прием приемной антенной отраженных земной поверхностью сигналов, их усиление и преобразование, измерение времени распространения радиоволн от летательного аппарата до поверхности Земли и обратно и преобразование его в двоичный код, при этом в состав радиовысотомера вводят постоянное запоминающее устройство и вычитающее устройство; задаваясь высотой, вычисляют методические ошибки измерения высоты радиовысотомером, вводят их в постоянное запоминающее устройство при изготовлении радиовысотомера, в процессе полета летательного аппарата измеряют его высоту полета в виде двоичного параллельного кода, вводят его в вычитающее устройство и в постоянное запоминающее устройство, извлекают из него значение кода методической ошибки на измеренной высоте полета, вычитают его в вычитающем устройстве из кода высоты и полученное значение кода высоты выдают потребителям, преобразовав его в код, принятый в системе управления летательного аппарата (патент RU №2262717 от 27.04.2004).
Однако прототип имеет следующие недостатки: данный способ измерения высоты полета сложен в реализации, имеет усложненный алгоритм произведения расчетов, не позволяет осуществлять измерение высоты с высокой точностью в особенности на малых и сверхмалых высотах при заходе летательного аппарата на посадку и не позволяет произвести посадку летательного аппарата в беспилотном режиме.
Задачи, на решение которых направлен заявленный способ следующие: устранение недостатков прототипа, осуществление измерений высоты с высокой точностью на малых и сверхмалых высотах при заходе летательного аппарата на посадку, а также возможность произвести расчет высоты полета, необходимой при заходе на посадку, в том числе в беспилотном режиме.
Технический результат достигается следующим образом: способ измерения высоты полета летательного аппарата на малых и сверхмалых высотах при заходе на посадку основан на том, что принимают сигнал наземного приемопередатчика, отраженный от летательного аппарата и смещенный по частоте за счет доплеровского сдвига, фиксируют момент времени, когда доплеровский сдвиг частоты fd достигнет заданного значения и момент времени, когда доплеровский сдвиг частоты достигнет значения, обратного заданному (-fd), определяют интервал времени Δt между этими моментами и рассчитывают высоту полета летательного аппарата на малых и сверхмалых высотах при заходе на посадку по формуле
при этом значение угла φ, образованного вектором направления скорости летательного аппарата и направлением луча от летательного аппарата на приемопередатчик, определяют по формуле
где λ - длина волны излучения,
fd - доплеровский сдвиг частоты,
V - скорость летательного аппарата.
Кроме того, способ измерения высоты полета летательного аппарата на малых и сверхмалых высотах при заходе на посадку позволяет произвести посадку любого, в том числе и беспилотного летательного аппарата в автоматическом режиме.
Кроме того, в способе измерения высоты полета летательного аппарата на малых и сверхмалых высотах при заходе на посадку для обеспечения высокой точности измерения высоты приемопередатчик работает в 3-мм СВЧ-диапазоне радиоволн, не подверженном интенсивному затуханию в различных погодных условиях.
Посадка летательного аппарата - самый сложный этап полета, так как при уменьшении высоты уменьшается возможность исправления ошибок летчика или автоматических систем.
Несмотря на внедрения новых технологических решений в авиационную технику и в системы управления воздушным движением, уровень авиапроисшествий во всем мире продолжает ежегодно возрастать.
Значительная часть (до 40%) всех авиапроисшествий приходится на самую опасную и напряженную фазу полета - снижение и посадку, поэтому решение задачи измерения высоты полета летательного аппарата на малых и сверхмалых высотах при заходе на посадку является актуальным.
Этап посадки самолета начинается с высоты 25-30 м (в случае стандартной курсоглиссадной системы) и завершается пробегом по взлетно-посадочной полосе до полной остановки летательного аппарата. Для легкомоторных самолетов этап посадки может начинаться с высоты 9-10 м.
Способ измерения высоты полета летательного аппарата на малых и сверхмалых высотах при заходе на посадку поясняется следующими иллюстрациями:
Фиг. 1 - схема посадки летательного аппарата
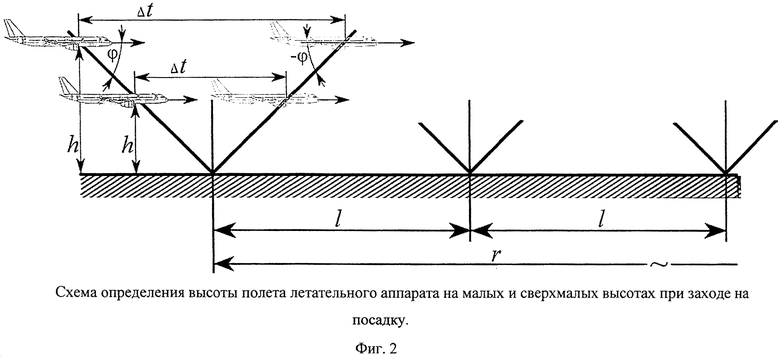
Фиг. 2 - схема определения высоты полета летательного аппарата на малых и сверхмалых высотах при заходе на посадку.
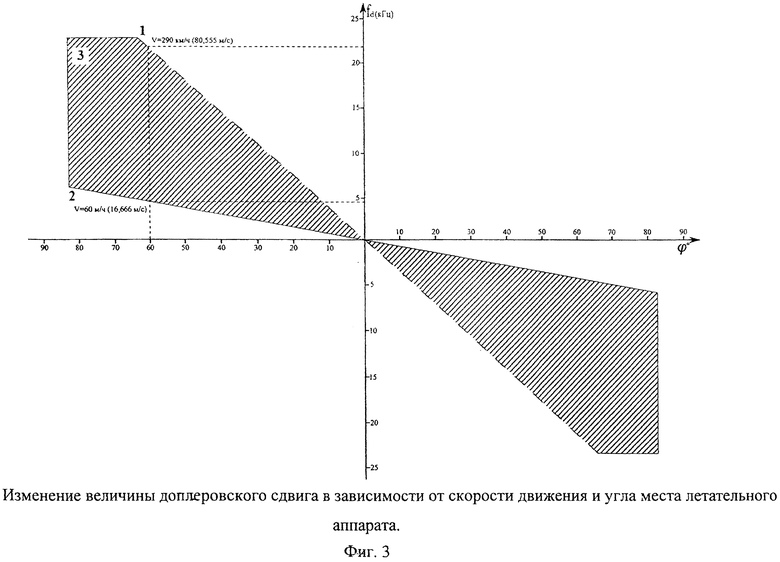
Фиг. 3 -зменение доплеровского сдвига в зависимости от скорости движения летательного аппарата.
На схеме посадки летательного аппарата - фиг. 1 отмечено, что посадка состоит из нескольких стадий. При этом V1 - скорость самолета при заходе на посадку и V2 - посадочная скорость; H1 - высота принятия решения летчиком о начале посадки летательного аппарата,; Н2 - высота начала выравнивания самолета; L1 - стадия планирования летательного аппарата; L2 - выравнивание летательного аппарата; L3 - выдерживание; L4 - пробег от момента касания взлетно-посадочной полосы летательным аппаратом до его полной остановки.
Воздушная часть посадки летательного аппарата длится порядка 6-10 секунд и в соответствии с фиг. 1 включает
парашютирование - часть посадки, которая начинается при уменьшении подъемной силы крыла и характеризуется ростом вертикальной скорости;
- выравнивание - часть посадки, во время которой вертикальная скорость снижения на глиссаде практически уменьшается до нуля; начинается на высоте 8-10 м и завершается переходом к выдерживанию на высоте 0,5-1 м;
- выдерживание - часть посадки, во время которой продолжается дальнейшее плавное снижение аппарата с одновременным уменьшением скорости и увеличением угла атаки до значений, при которых возможно приземление и пробег;
- приземление - контакт летательного аппарата с земной поверхностью.
При этом для каждого класса летательного аппарата значения скорости и высоты захода на посадку различны. Так, например, для самолета класса ТУ-154 (массой 90-100 т) начало этапа посадки (H1) лежит в пределах 25-30 метров, высота начала выравнивания самолета (Н2) - в пределах 8-10 метров, скорость самолета при заходе на посадку (V1) - в пределах 250-260 км/ч, посадочная скорость (V2) - 190-200 км/ч, пробег (L4) - 2000 м. Для легкомоторных летательных аппаратов класса TL-2000 Sting (массой 0,6-0,7 т) эти значения будут следующими: H1 - 9-10 метров, Н2 - 3-4 метра, V1 - 80-100 км/ч, V2 - 60-65 км/ч, L4 - 300 м. (Данные из ТТХ летательных аппаратов и справочной литературы).
На фиг. 2 показана схема определения высоты полета летательного аппарата на малых и сверхмалых высотах при заходе на посадку. Для расчета высоты полета летательного аппарата (h) необходимо определить расстояние от края взлетно-посадочной полосы до первого приемопередатчика на проекции глиссады летательного аппарата (r); расстояние между приемопередатчиками значение угла, образованного вектором направления скорости летательного аппарата и направлением луча от летательного аппарата на приемопередатчик  интервал времени (Δt), в течение которого летательный аппарат проходит изменение величины доплеровского сдвига от fd до (-fd).
интервал времени (Δt), в течение которого летательный аппарат проходит изменение величины доплеровского сдвига от fd до (-fd).
При этом угол φ - угол, образованный направлением вектора скорости и направлением вектора от летательного аппарата на приемопередатчик. Для высокой точности измерения высоты полета летательного аппарата приемопередатчики могут располагаться на проекции глиссады, где первый приемопередатчик размещается на удалении высоты принятия решения, максимальном для данного класса летательного аппарата заходящего на посадку. Расстояние r от края взлетно-посадочной полосы до первого приемопередатчика на проекции глиссады летательного аппарата, расстояние выбирается таким образом, чтобы приемопередатчик находился на удалении высоты принятия решения, максимальном для данного класса летательного аппарата, заходящего на посадку, где высота принятия решения - это высота, на которой экипаж самолета обязан принять решение о продолжении посадки или об уходе на второй круг.
Расстояние между приемопередатчиками - l, а также количество приемопередатчиков выбирается таким образом, чтобы обеспечивалась непрерывность измерения высоты.
На фиг. 3 изображено изменение доплеровского сдвига fd в зависимости от скорости движения и угла места летательного аппарата, которое зависит от значения угла, образованного вертикалью и направлением луча от летательного аппарата на приемопередатчик - φ;
На поясняющем графике (фиг. 3) изображено:
1 - зависимость величины доплеровского сдвига от угла направления на приемопередатчик φ для максимально возможной скорости летательного аппарата начала выполнения посадки (для тяжелых летательных аппаратов - 290 км/ч);
2 - зависимость величины доплеровского сдвига от угла направления на приемопередатчик φ, для минимально возможной скорости летательного аппарата начала выполнения посадки (для легкомоторных летательных аппаратов - 60 км/ч);
3 - область зависимостей величин доплеровского сдвига от скоростей летательных аппаратов и их углов места.
В заявляемом способе в расчетах значений высоты полета при заходе на посадку летательного аппарата большое значение приобретает величина доплеровского сдвига частоты.
Значение доплеровского сдвига отраженного от летательного аппарата сигнала передатчика определяется по формуле
где fн - несущая частота передатчика,
V - скорость движения летательного аппарата
fd - доплеровский сдвиг частоты
С - скорость света
Значение доплеровского сдвига не зависит от высоты движения летательного аппарата, но зависит от вектора направления скорости и направления на приемопередатчик.
Расчет производят следующим образом. Вначале выбирают фиксированное значение частоты fd для текущей скорости и фиксируют моменты времени, когда доплеровский сдвиг частоты fd достигнет заданного, далее фиксируют момент времени, когда доплеровский сдвиг частоты достигнет значения, обратного заданному (-fd), затем определяют интервал времени Δt между этими моментами. Значение угла φ вычисляют
а затем рассчитывают значение высоты полета летательного аппарата на малых и сверхмалых высотах при заходе на посадку:
В соответствии с заявляемым способом можно рассчитать высоту полета летательного аппарата на малых и сверхмалых высотах при заходе на посадку.
Способ поясняется следующими примерами
Пример расчета №1:
Для летательного аппарата класса ТУ-154 во время начала выполнения этапа посадки, при заданном значении частоты доплеровского сдвига fd=19 кГц и скорости полета V=250 км/ч (69,444 м/сек), длине волны приемопередатчика λ=3,189 мм рассчитанное значение угла φ:

измеренное значение Δt=1,248 сек, рассчитываемое значение высоты полета h:

Пример расчета №2:
При дальнейшем снижении скорости полета до V=210 км/ч (58,333 м/сек) и высоты полета до высоты выдерживания, при прочих равных условиях, измеренное значение Δt=0,0297 сек, рассчитываемое значение высоты полета h:

Пример расчета №3:
Для летательного аппарата класса TL-2000 Sting во время начала выполнения этапа посадки, при заданном значении частоты доплеровского сдвига fd=8 кГц и скорости полета V=100 км/ч (27,777 м/сек), длине волны излучения λ=3,189 мм рассчитанное значение угла φ:

измеренное значение Δt=1,248 сек, рассчитываемое значение высоты полета h:

Пример расчета №4:
При дальнейшем снижении скорости полета до V=65 км/ч (18 м/сек) и высоты полета до высоты выдерживания, при прочих равных условиях, измеренное значение Δt=0,257 сек, рассчитываемое значение высоты полета h:

Поскольку значение величины доплеровского сдвига зависит от скорости летательного аппарата, то и задаваемое значение доплеровского сдвига для расчета значения угла φ, для последующего определения высоты полета заходящего на посадку летательного аппарата, для каждого класса летательного аппарата должно быть свое. (Фиг. 3)
Время нахождения летательного аппарата в зоне действия приемопередатчика при высоте полета 1 м и скорости полета V=210 км/ч (58,333 м/сек) составляет 0,0594 с. Поэтому для измерения временного промежутка с погрешностью 0,01 с используем датчик времени с периодом следования импульсов 10 мс. Для измерения значения доплеровского смещения с точностью до единицы Гц используем генератор со стабильностью несущей частоты 10-10.
Способ измерения высоты полета летательного аппарата на малых и сверхмалых высотах при заходе на посадку позволяет произвести посадку любого, в том числе и беспилотного летательного аппарата в автоматическом режиме.
Предлагаемый способ обеспечивает высокую точность расчета высоты полета летательного аппарата на малых и сверхмалых высотах при заходе на посадку.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ АВТОМАТИЧЕСКОЙ ПОСАДКИ ЛЕТАТЕЛЬНОГО АППАРАТА В СЛОЖНЫХ МЕТЕОРОЛОГИЧЕСКИХ УСЛОВИЯХ, В ТОМ ЧИСЛЕ БЕСПИЛОТНОГО | 2015 |
|
RU2585197C1 |
| СПОСОБ ИЗМЕРЕНИЯ СВЕРХМАЛОЙ ВЫСОТЫ ПОЛЕТА САМОЛЕТА ПРЕИМУЩЕСТВЕННО ГИДРОСАМОЛЕТА, НАД ВОДНОЙ ПОВЕРХНОСТЬЮ И ПАРАМЕТРОВ МОРСКОГО ВОЛНЕНИЯ | 2014 |
|
RU2557999C1 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ МОРСКИХ ВОЛН С БОРТА ДВИЖУЩЕГОСЯ СУДНА | 2014 |
|
RU2563314C1 |
| АВТОМАТИЧЕСКИЙ БЕСПИЛОТНЫЙ ДИАГНОСТИЧЕСКИЙ КОМПЛЕКС | 2000 |
|
RU2200900C2 |
| СПОСОБ ИЗМЕРЕНИЯ ОТНОСИТЕЛЬНОЙ ВЫСОТЫ ПОЛЕТА РАКЕТЫ КЛАССА "ВОЗДУХ-ПОВЕРХНОСТЬ" | 2002 |
|
RU2249830C2 |
| СИСТЕМА КОРРЕКЦИИ ОШИБОК ИНС ЛЕТАТЕЛЬНОГО АППАРАТА ПО ДОРОЖНОЙ КАРТЕ МЕСТНОСТИ | 2018 |
|
RU2684710C1 |
| СПОСОБ АВИАЦИОННОЙ БЛИЖНЕЙ РАДИОНАВИГАЦИИ | 2021 |
|
RU2778179C1 |
| СПОСОБ ОДНОЛУЧЕВОГО ИЗМЕРЕНИЯ ВЫСОТЫ И СОСТАВЛЯЮЩИХ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2551896C2 |
| СПОСОБ ИЗМЕРЕНИЯ РАДИОВЫСОТОМЕРОМ МАЛЫХ И ПРЕДЕЛЬНО МАЛЫХ ВЫСОТ | 2004 |
|
RU2262717C1 |
| СПОСОБ ИЗМЕРЕНИЯ СВЕРХМАЛОЙ ВЫСОТЫ ПОЛЕТА САМОЛЕТА, ПРЕИМУЩЕСТВЕННО ГИДРОСАМОЛЕТА, НАД ВОДНОЙ ПОВЕРХНОСТЬЮ И ПАРАМЕТРОВ МОРСКОГО ВОЛНЕНИЯ | 1999 |
|
RU2183010C2 |
Изобретение относится к радиолокации и может быть использовано для создания систем автоматизированного управления параметрами, в том числе высоты полета при заходе на посадку летательных аппаратов различных классов, а также в беспилотном режиме. Достигаемый технический результат - повышение точности измерения высоты при заходе летательного аппарата на посадку. Указанный результат достигается за счет того, что принимают сигнал наземного приемопередатчика, отраженный от летательного аппарата и смещенный по частоте за счет доплеровского сдвига, фиксируют момент времени, когда доплеровский сдвиг частоты fd достигнет установленного значения и момент времени, когда доплеровский сдвиг частоты достигнет значения, обратного установленному (-fd), определяют интервал времени Δt между этими замерами и рассчитывают высоту полета летательного аппарата на малых и сверхмалых высотах при заходе на посадку по формуле
при этом значение угла φ, образованного вектором направления скорости летательного аппарата и направлением луча от летательного аппарата на приемопередатчик, определяют по формуле
где λ - длина волны излучения,
fd - доплеровский сдвиг частоты,
V - скорость летательного аппарата. 2. з.п. ф-лы, 3 ил.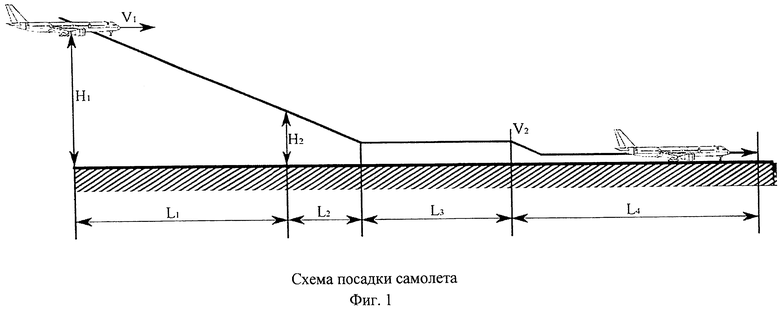
1. Способ измерения высоты полета летательного аппарата на малых и сверхмалых высотах при заходе на посадку, основанный на том, что принимают сигнал наземного приемопередатчика, отраженный от летательного аппарата и смещенный по частоте за счет доплеровского сдвига, фиксируют момент времени, когда доплеровский сдвиг частоты fd достигнет заданного значения и момент времени, когда доплеровский сдвиг частоты достигнет значение, обратное заданному (-fd), и определяют интервал времени ∆t между этими моментами, а расчет высоты полета летательного аппарата на малых и сверхмалых высотах при заходе на посадку рассчитывают по формуле
при этом значение угла φ, образованного вектором направления скорости летательного аппарата и направлением от летательного аппарата на приемопередатчик, определяют следующим образом:
где λ - длина волны излучения приемопередатчика,
fd - доплеровский сдвиг частоты,
V - скорость летательного аппарата.
2. Способ измерения высоты полета летательного аппарата на малых и сверхмалых высотах при заходе на посадку по п. 1, отличающийся тем, что позволяет произвести посадку любого, в том числе и беспилотного летательного аппарата в автоматическом режиме.
3. Способ измерения высоты полета летательного аппарата на малых и сверхмалых высотах при заходе на посадку по п. 1, отличающийся тем, что для обеспечения высокой точности измерения высоты приемопередатчик работает в 3-мм СВЧ-диапазоне радиоволн, не подверженном интенсивному затуханию в различных погодных условиях.
| СПОСОБ ИЗМЕРЕНИЯ РАДИОВЫСОТОМЕРОМ МАЛЫХ И ПРЕДЕЛЬНО МАЛЫХ ВЫСОТ | 2004 |
|
RU2262717C1 |
| СИСТЕМА ИЗМЕРЕНИЯ ВЫСОТНО-СКОРОСТНЫХ ПАРАМЕТРОВ ЛЕТАТЕЛЬНОГО АППАРАТА | 2011 |
|
RU2477862C1 |
| ИМПУЛЬСНЫЙ РАДИОВЫСОТОМЕР | 2004 |
|
RU2258943C1 |
| СПОСОБ ДИСТАНЦИОННОГО УПРАВЛЕНИЯ ВЫСОТОЙ ПОЛЕТА РАДИОУПРАВЛЯЕМОЙ МОДЕЛИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2319191C1 |
| US 7145501 B1, 05.12.2006 | |||
| US 4509049 A, 02.04.1985 | |||
| WO 2007038068 A3, 18.05.2007 | |||
| ЭЛЕКТРОЛИТ ДЛЯ ЭЛЕКТРОХИМИЧЕСКОГО ОСАЖДЕНИЯ ФУНКЦИОНАЛЬНЫХ ПОКРЫТИЙ НИКЕЛЬ - БОР | 1993 |
|
RU2124072C1 |

