Изобретение относится к области промышленной робототехники и, в частности, к роботам-манипуляторам, используемым в технологических конвейерных линиях покраски изделий для возвратно-поступательного перемещения распылителей краски или порошка при горизонтальном перемещении подвесного конвейера с окрашиваемыми изделиями.
Известен целый ряд устройств для вертикального перемещения рабочих органов роботов-манипуляторов. Так, в [1] приведен механизм ползуна робота М40П, имеющий вертикальную опорную стойку с наклонными направляющими, контактирующими с восемью цилиндрическими колесами, размещенными на каретке ползуна, имеющего гидравлический привод подъема и опускания. Однако приведенный механизм достаточно сложен в изготовлении, каретка имеет избыточное количество неравнонагруженных колес, которые требуют трудоемкой сборки и регулировки.
В источнике [2] приведено описание кранов-штабелеров, имеющих вертикальные колонны с направляющими преимущественного прямоугольного сечения, ходовые балки, тележку грузоподъемника с горизонтальными телескопическими захватами, контактирующую с колонной при помощи цилиндрических колес, которые установлены со всех сторон колонны, электропривод с гибким рабочим органом перемещения - канатом или цепью.
К недостаткам подобных конструкций следует отнести отсутствие противовесов, что приводит к увеличению мощности привода, сложная конструкция сварной колонны, требующая трудоемкой механической обработки, а также избыточное количество опорных колес по сравнению с возможным.
Наиболее близким аналогом данной конструкции является робот-манипулятор фирмы BINKS, предназначенный для покраски изделий порошковой полимеризующейся при нагреве в печи краской [3]. Данный робот-манипулятор имеет вертикальную колонну из листового материала толщиной 3 мм, на каждой из боковых панелей которой отформованы внутренние направляющие треугольного сечения с углом при вершине 90°. По направляющим спереди смонтирована рабочая тележка с двумя руками для установки распылителей порошка, которая смонтирована на восьми цилиндрических колесах под углом 45° к лицевой плоскости рабочей тележки, контактирующих с боковыми сторонами направляющих. На второй паре направляющих смонтирована тележка с противовесами на колесах, имеющих канавки треугольного сечения с углом при вершине 90°. Тележки имеют цепной привод от мотор-редуктора. Положение тележек фиксируется потенциометром, используемым как датчик обратной связи. Панели с направляющими скреплены между собой при помощи стяжных поперечных планок.
Однако конструкция робота-манипулятора фирмы BINKS имеет целый ряд недостатков. Для формирования направляющих в боковых панелях требуется крупногабаритное прессовое оборудование и дорогостоящие штампы. Раздельное выполнение направляющих на боковых панелях приводит при сборке к погрешности их взаимного положения по меньшей мере по четырем координатам и к необходимости применения большого числа регулируемых колес на рабочей тележке. Это увеличивает габариты колонны. Подшипниковый узел верхней ведомой звездочки цепи установлен на верхней крышке, что также приводит к погрешности базирования при сборке.
Задачами настоящего изобретения являются упрощение конструкции и технологии изготовления робота-манипулятора без применения дорогостоящего оборудования и оснастки, уменьшения погрешности базирования при сборке тележек и подшипникового узла верхней звездочки, уменьшение габаритов колонны.
Поставленные задачи решаются тем, что в конструкции колонны применены две прямоугольные трубы из готового проката, смонтированные так, чтобы их общая диагональ была параллельна лицевой поверхности рабочей тележки. Ведомая верхняя звездочка цепной передачи установлена в прорези труб вдоль их общей диагонали на подшипниковых узлах, прикрепленных к боковым сторонам труб с осью, параллельной лицевой поверхности рабочей тележки. Сама рабочая тележка установлена на четырех цилиндрических колесах с ребордами.
Причем опорная часть верхних колес контактируют с поверхностями передней трубы, обратными от рабочей тележки, а опорная часть нижних колес - с поверхностями трубы со стороны рабочей тележки. Такое расположение колес позволяет при их минимальном количестве (всего применяется 4 колеса) парировать очень большие моменты от действия статической и динамической нагрузки от установленного на крепления рук робота-манипулятра технологического оборудования. Одновременно такая компоновка позволяет обеспечивать устойчивость движения тележки в горизонтальной и вертикальной плоскостях.
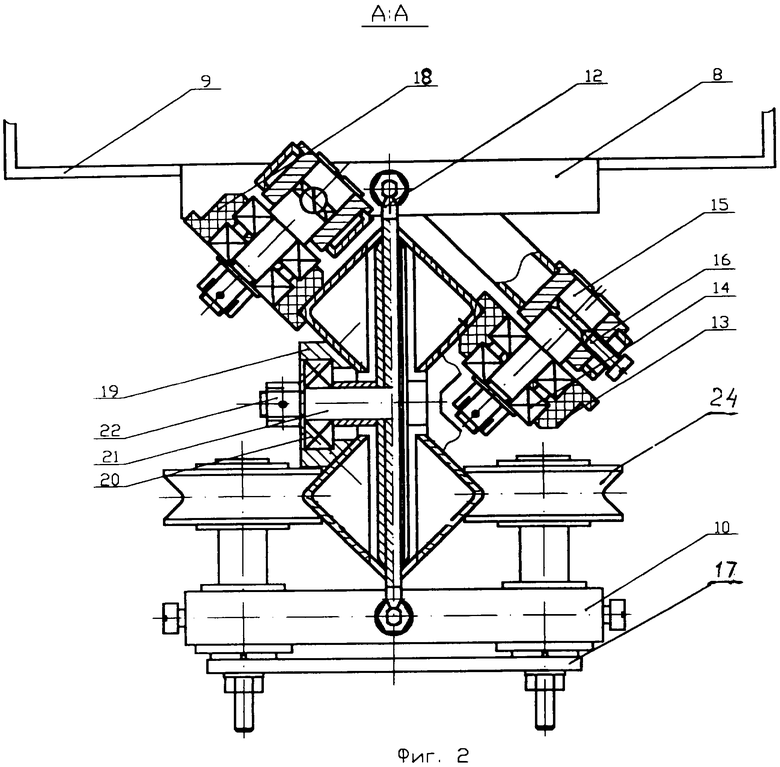
Конструкция робота-манипулятора поясняется чертежами. На фиг.1 приведена общая компоновка конструкции, на фиг.2 выполнены сечения через верхний подшипниковый узел, а также верхнее и нижнее колеса рабочей тележки. На фиг.3 показана схема действия сил и моментов на рабочую тележку.
Так, на фиг.1 изображена колонна 1, установленная на поперечине 2, к которой снизу прикреплен мотор-редуктор 3. Ведущая звездочка 4 смонтрована на выходном валу мотор-редуктора. Шестерня 5 на том же валу находится в зацеплении с зубчатым колесом 6 привода потенциометра обратной связи 7. На колонне 1 установлена рабочая тележка 8 с руками 9, а также тележка противовесов 10. Ведомая звездочка 12 установлена в прорези колонны в плоскости, проходящей через общую диагональ прямоугольных труб, и через приводную цепь 23 соединена с механизмом продольного натяжения цепи 11.
Верхнее цилиндрическое колесо 13 рабочей тележки (фиг.2) контактирует с плоскостью передней трубы, обратной по отношению к лицевой поверхности рабочей тележки 8. Колеса установлены на подшипниках 14 под углом 45° к плоскости рабочей тележки, которые надеты на эксцентричную ось 15, также для регулировки радиального положения колеса. Эксцентричные оси применены на всех колесах робота-манипулятора. Положение эксцентричной оси 15 фиксируется винтом 16. Нижнее колеса 18 рабочей тележки, имеющее аналогичную конструкцию, контактирует с плоскостью передней трубы со стороны рабочей тележки. Колеса тележки противовесов 24 имеют треугольную в сечении канавку с углом при вершине 90° и контактируют с вершинами задней трубы колонны 1 в плоскости, параллельной лицевой поверхности рабочей тележки. На данную тележку устанавливаются дополнительные грузы 17 в качестве противовесов.
Ведомая звездочка 12 установлена в прорези колонны 1 перпендикулярно лицевой плоскости рабочей тележки. Корпус подшипникового узла 19, в котором размещены подшипники 20, прикреплен к боковой стороне колонны в пространстве между трубами. Данная звездочка установлена в подшипниках на оси 21 и закреплена на ней при помощи корончатых гаек 22. Аналогичными гайками фиксируется положение рабочих колес тележек.
На фиг.3 видно, что от действия технологической нагрузки образуется момент М=Pl, где P=mg - вес технологической нагрузки, а l - соответствующее плечо. Сила реакции в колесах - Q создает при расстоянии между верхним и нижнем колесами - h противодействующий момент Mпр=Qh. Тяговое усилие для перемещения тележек R передается через цепь 23.
Робот-манипулятор работает следующим образом. Мотор редуктор 3 обеспечивает прямое и возвратное вращение ведущей звездочки 4. Через цепь 23 тяговое усилие передается на ту тележку, которая в данный момент перемещается вниз. Натяжение цепи регулируется винтом устройства продольного натяжения цепи 11. Через шестерню 5 и зубчатое колесо 6 вращение передается также на потенциометр обратной связи 7, позволяющий определять положение тележек. Ведомая звездочка 12 изменяет направление движения цепи и передает тяговое усилие на тележку, в данный момент двигающуюся верх. Верхние колеса рабочей тележки 13 совместно с нижними колесами 16 создают эффективный парирующий момент Мпр по отношению к моменту от технологической нагрузки М и одновременно обеспечивают устойчивое движение рабочей тележки в двух взаимно-перпендикулярных плоскостях, поскольку технологическая нагрузка постоянно прижимает все колеса рабочей тележки к соответствующим плоскостям. Реборды колес еще более повышают устойчивость. Тележка противовесов 10 за счет дополнительных грузов 18 компенсирует вес технологической нагрузки. Осевое положение колес регулируется корончатыми гайками типа 22, а радиальный зазор - при помощи поворота оси 15 с последующей фиксацией ее винтом 16. Аналогично регулируется радиальный зазор в каретке противовесов. Осевой зазор в подшипниковом узле верхней звездочки регулируется корончатой гайкой 22. Таким образом, описанная выше конструкция робота-манипулятора обеспечивает достижение поставленных целей.
Источники
1. Промышленные роботы в машиностроении. Альбом схем и чертежей. Учеб. пособие для технических вузов / Ю.М.Соломенцев, К.П.Жуков, Ю.А.Павлов и др.; Под общей редакцией Ю.М.Соломенцева - М.: Машиностроение, 1986. 140 с.: ил. - стр.128.
2. Краны-штабелеры/ А.И.Зерцалов и др. 3-е изд. Переаб. и доп. М., Машиностроение, 1986-320 с., ил. стр.53-55.
3. Материалы фирмы BINKS (прилагаются).
| название | год | авторы | номер документа |
|---|---|---|---|
| Поливная машина | 1989 |
|
SU1717012A1 |
| Способ подготовки листа шпона к склейке на ус и станок кромкофрезерный с узлом фрезерования и устройством нанесения клея для его реализации | 2020 |
|
RU2740321C1 |
| УСТРОЙСТВО ДЛЯ УСКОРЕННЫХ ИСПЫТАНИЙ МНОГООПОРНЫХ ДОЖДЕВАЛЬНЫХ МАШИН ФРОНТАЛЬНОГО И КРУГОВОГО ДЕЙСТВИЯ | 1998 |
|
RU2129262C1 |
| Транспортный промышленный робот | 1987 |
|
SU1743845A1 |
| Самоходная поливная машина | 1989 |
|
SU1655382A1 |
| МОСТОВОЙ АГРЕГАТ ДЛЯ ВОЗДЕЛЫВАНИЯ НИЗКОСТЕБЕЛЬНЫХ РАСТЕНИЙ | 1994 |
|
RU2076552C1 |
| АГРЕГАТ ДЛЯ ВОЗДЕЛЫВАНИЯ РАСТЕНИЙ НА КРУГОВОМ АГРОУГОДЬЕ | 2001 |
|
RU2183393C2 |
| Устройство для установки в боксы автомобилей в многоэтажных автоматизированных гаражах | 1990 |
|
SU1825866A1 |
| Устройство для механизированной подачи стартовой смеси в выпускной канал сталеразливочного ковша | 2024 |
|
RU2832293C1 |
| МНОГООПОРНАЯ ДОЖДЕВАЛЬНАЯ МАШИНА КРУГОВОГО ДЕЙСТВИЯ | 2015 |
|
RU2596130C1 |

Изобретение относится к области промышленной робототехники и, в частности, к роботам-манипуляторам, используемым в технологических конвейерных линиях покраски изделий. Робот-манипулятор содержит вертикальную колонну с двумя парами направляющих, рабочую тележку с руками, тележку противовесов, цепной привод со звездочками, мотор-редуктор и узел потенциометра для определения положения тележек. Колонна представляет собой две прямоугольные трубы, смонтированные так, чтобы их общая диагональ была перпендикулярна плоскости рабочей тележки. Ведомая звездочка цепной передачи установлена в прорези труб вдоль их общей диагонали и смонтирована на подшипниковых узлах, прикрепленных к боковым сторонам труб с осью, параллельной плоскости рабочей тележки. При этом рабочая тележка установлена на колесах с ребордами, расположенных под углом 45° к плоскости рабочей тележки и контактирующих с передней трубой колонны. Тележка противовесов установлена на колесах с канавками треугольного сечения с углом при вершине 90°, контактирующих с вершинами сечения второй прямоугольной трубы колонны в плоскости, параллельной плоскости рабочей тележки. Изобретение позволит уменьшить погрешность базирования при сборке тележек и подшипникового узла верхней звездочки, уменьшение габаритов колонны. 3 ил.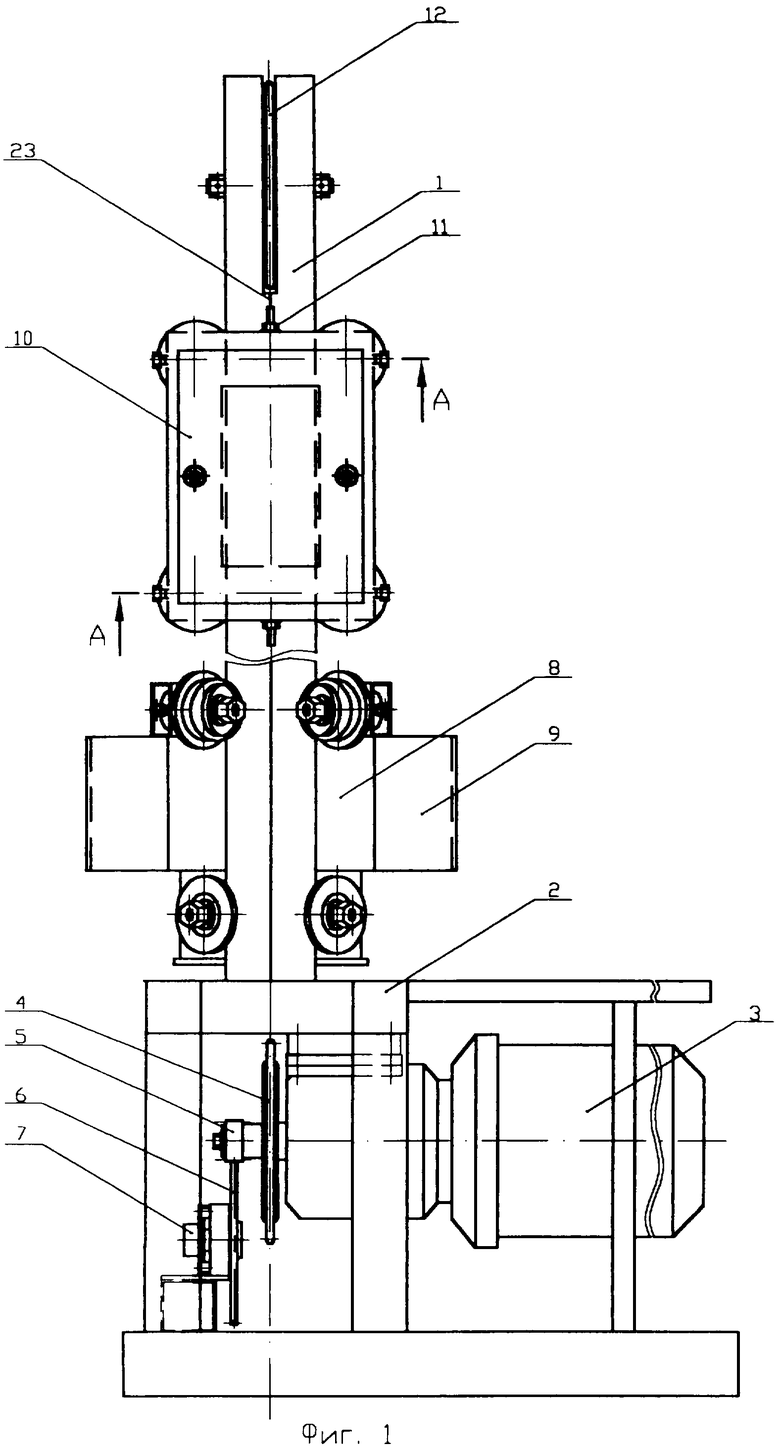
Робот-манипулятор, содержащий вертикальную колонну с двумя парами направляющих, рабочую тележку с руками для установки технологического оборудования, установленную на цилиндрических колесах, расположенных под углом 45° к плоскости рабочей тележки, тележку противовесов, установленную на колесах с канавками треугольного сечения с углом при вершине 90°, цепной привод со звездочками, мотор-редуктор, узел потенциометра для определения положения тележек, отличающийся тем, что колонна представляет собой две прямоугольные трубы, смонтированные так, чтобы их общая диагональ была перпендикулярна плоскости рабочей тележки, ведомая звездочка цепной передачи установлена в прорези труб вдоль их общей диагонали и смонтирована на подшипниковых узлах, прикрепленных к боковым сторонам труб с осью, параллельной плоскости рабочей тележки, при этом рабочая тележка смонтирована на четырех колесах с ребордами так, что опорная часть верхних колес контактирует с обратными от рабочей тележки плоскостями передней трубы колонны, опорная часть нижних колес рабочей тележки контактирует с передними плоскостями этой же трубы, а колеса тележки противовесов контактируют с вершинами сечения второй прямоугольной трубы колонны в плоскости, параллельной плоскости рабочей тележки.
| ЗЕРЦАЛОВ А.И | |||
| и др | |||
| Краны-штабелеры | |||
| - М.: Машиностроение, 1986, с.53-55 | |||
| КИРЕЕВ B.C | |||
| Механизация и автоматизация погрузочно-разгрузочных работ | |||
| Учеб | |||
| для техникумов | |||
| - М.: Транспорт, 1991, с.331-346 | |||
| УСТАНОВКА ДЛЯ НАНЕСЕНИЯ ПОКРЫТИЙ | 1996 |
|
RU2131306C1 |
| СПОСОБ ВЫРАЩИВАНИЯ МОНОКРИСТАЛЛОВ ТУГОПЛАВКИХ МАТЕРИАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2046159C1 |

