Изобретение относится к водному транспорту и может быть использовано для управления траекторией движения буксируемого судна при выполнении буксирной операции.
Известен способ управления траекторией движения буксируемого судна, основанный на перекладке руля направления по величине поперечного смещения буксируемого судна от кильватерной струи буксирующего судна, определяемой визуально на буксируемом судне [1], [2], [4].
Однако при буксировке в известном способе не учитывается фактор невозможности визуального определения направления кильватерной струи буксирующего судна при определенных обстоятельствах, в частности:
- при выполнении буксирной операции в условиях ограниченной видимости (ночное время суток, плотные атмосферные осадки, туман и др.);
- при выполнении буксирной операции в условиях сильного ветра и волнения, когда кильватерная струя буксирующего судна существенно отклоняется от его диаметральной плоскости (ДП) и перестает быть ориентиром для буксируемого судна.
Задача изобретения - повышение точности удержания буксируемого судна на заданной траектории движения относительно буксирующего судна.
Технический результат заключается в совершенствовании управления буксирной системой: буксирующее судно - буксируемое судно и тем самым в обеспечении безопасности буксирной операции.
Для этого вычисляют отклонения носовой и кормовой точек буксируемого судна от линии диаметральной плоскости (ДП) буксирующего судна, при этом линия ДП проведена через носовую и кормовую точки буксирующего судна, по результатам вычислений определяют величину сигнала управления, в соответствии с его значением производят перекладку руля на буксируемом судне.
Сущность способа поясняется чертежами, представленными на фиг.1-5, и заключается в следующем.
В случае буксировки одного судна другим (фиг.1) буксирующее судно 1 является задатчиком траектории движения для буксируемого судна 2, и любое изменение его движения по курсу влечет за собой изменение траектории движения буксируемого судна 2 (позиция 4 на фиг.1 - буксирный трос).
На буксирующем судне 1 в пределах его контура в его ДП выбирают две точки. Одна из них расположена к носу судна 1 (точка A1 на фиг.1), а другая - к корме судна 1 (точка B1 на фиг.1) относительно плоскости мидель-шпангоута. Расстояние между точками A1 и B1 выбирают в зависимости от технической возможности размещения в этих точках приемных антенн спутниковой навигационной системы (СНС). Чем больше это расстояние, тем качественнее работа системы управления движением буксируемого судна 2.
Координаты этих точек определяют непрерывно с высокой точностью (±1,0 м), это стало возможным с введением в СНС береговых станций, вычисляющих и передающих на судно дифференциальные поправки [3].
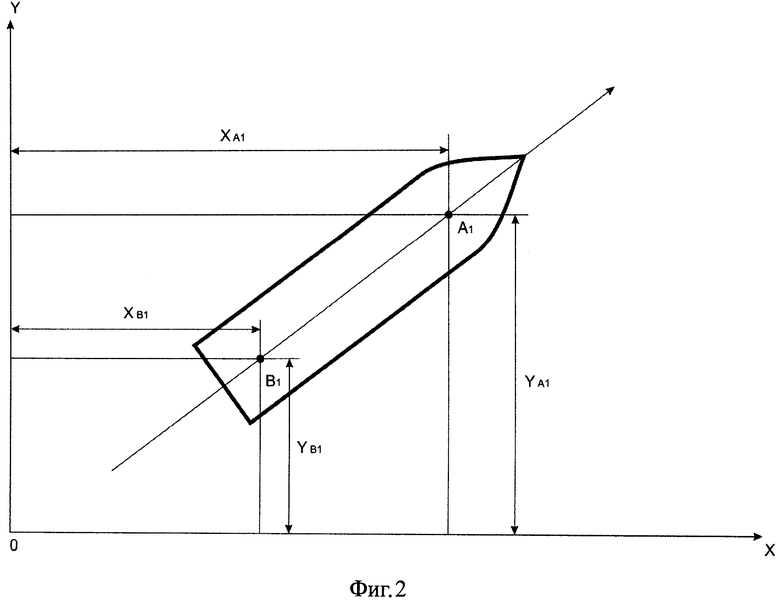
Значения координат точки A1(XA1, YA1) и точки B1(XB1, YB1) (фиг.2) позволяют непрерывно вычислять положение линии ДП буксирующего судна 1 и передавать его на буксируемое судно 2.
На буксируемом судне 2 в пределах его контура в его ДП выбирают две точки. Одна из них расположена к носу буксируемого судна 2 (точка А2 на фиг.1), а другая - к его корме (точка B1 на фиг.1) относительно плоскости мидель-шпангоута. Расстояние между точками А2 и В2 выбирают в зависимости от технической возможности размещения в этих точках приемных антенн СНС. Чем больше это расстояние, тем качественнее работа системы управления движением буксируемого судна.
Координаты этих точек определяют непрерывно с высокой точностью (±1,0 м).
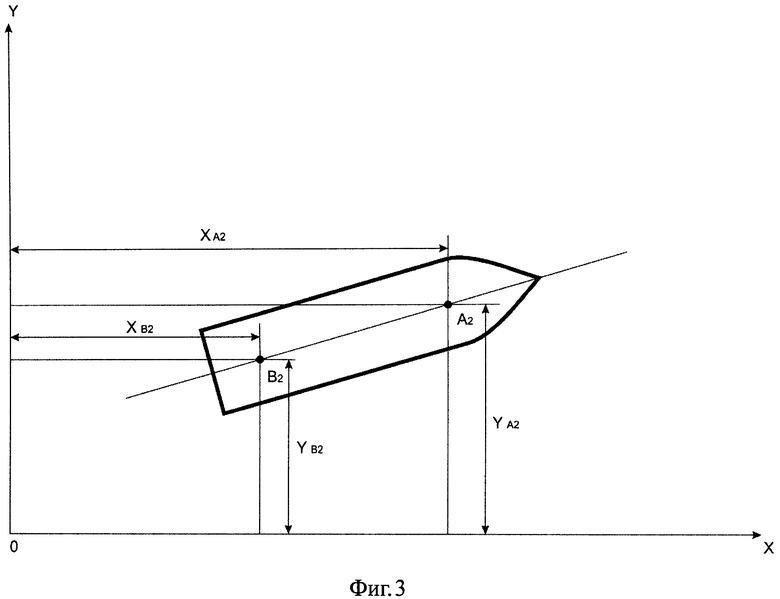
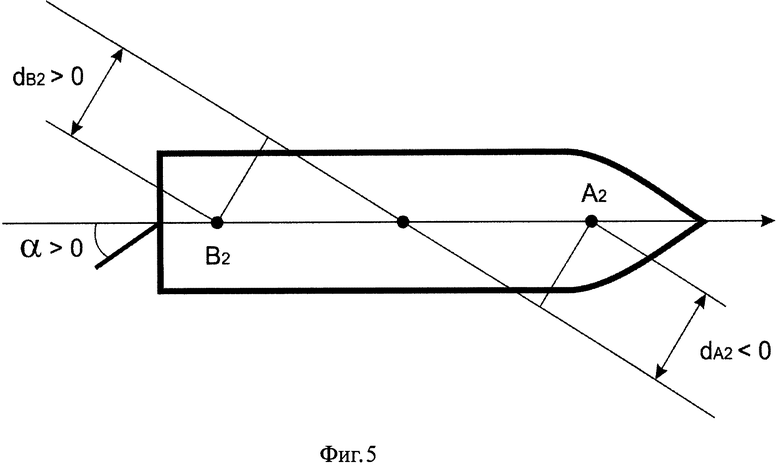
Непрерывное определение значений координат точек А2(ХA2, YA2) и B2 (ХB2, YB2) (фиг.3) буксируемого судна 2 позволяет непрерывно вычислять поперечные смещения точки А2 (dA2) и точки В2 (dB2) от текущего положения линии ДП буксирующего судна 1 (позиция 3 на фиг.1) Причем поперечное смещение точки А2 или В2 от линии ДП буксирующего судна 1 считается положительным, если точка (А2 или В2) смещается вправо, и отрицательным, если она смещается влево относительно линии ДП буксирующего судна 1 (фиг.4, 5).
Возникающие поперечные смещения точек А2 и В2 буксируемого судна 2 относительно текущего положения линии ДП буксирующего судна 1 вырабатывают сигнал на отклонение рулевого органа, например руля буксируемого судна 2, по закону:

где kA, kB - коэффициенты усиления по поперечным смещениям носовой и кормовой точек буксируемого судна 2 от линии ДП буксирующего судна 1. Это положительные величины, причем численное значение коэффициента kA больше численного значения коэффициента kB. Угол перекладки руля α считается положительным при его перемещении в сторону правого борта.
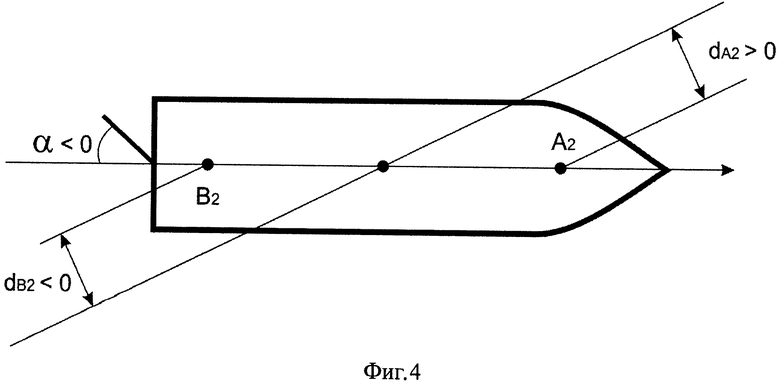
На фиг.4, 5 изображены варианты возможных отклонений буксируемого судна 2 от ДП буксирующего судна 1 и управление в каждом из них. Например, на фиг.4 ДП буксирующего судна 1 пересекает линию ДП буксируемого судна 2 под некоторым углом, величина которого характеризуется значениями поперечных смещений точки А2 (dA2) и точки В2 (dB2), причем dA2 больше 0, dB2 меньше 0 и dA2 меньше 0, dB2 больше 0 на фиг.5. В первом случае (фиг.4) согласно закону (1) угол отклонения руля буксируемого судна 2 будет иметь отрицательное значение, т.е. руль будет переложен на левый борт и судно начнет поворот влево, что приведет к уменьшению dA2 и dB2 и в конечном итоге к выходу буксируемого судна 2 на линию ДП буксирующего судна 1. Во втором случае (фиг.5) согласно закону (1) угол отклонения руля буксирующего судна 1 будет иметь положительное значение, т.е. руль будет переложен на правый борт и буксируемое судно 2 начнет поворот вправо, что приведет к уменьшению dA2, dB2 и к выходу судна 2 на линию ДП буксирующего судна 1.
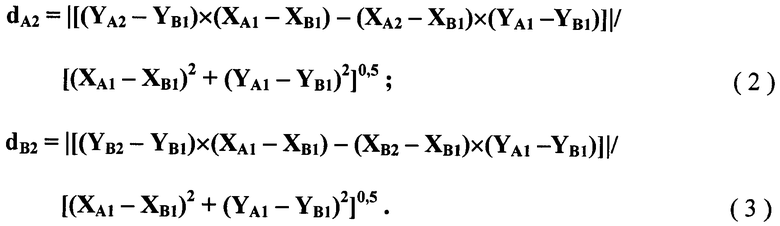
Значения отклонений точек А2 и В2 от линии ДП буксирующего судна 1 определяются по формулам:
Предлагаемый способ позволяет значительно повысить устойчивость и точность удержания буксируемого судна относительно траектории движения буксирующего судна, что способствует существенному повышению безопасности выполнения буксирной операции, особенно в стесненных с навигационной точки зрения условиях плавания и при плохой видимости.
Литература
1. Алексеев Л.Л. Практическое пособие по управлению морским судном / Л.Л.Алексеев; ЦНИИМФ. - СПб.: ЦНИИМФ, 2003. - 188 с. - (Судовладельцам и капитанам. Вып.№5). - ISBN 5-93188-056-09: 220-00; 177-00.
2. Инструкция по безопасности морских буксировок: утв. Федер. службой мор. флота России: 08.06.96 МФ 35/1921. - СПб.: ЗАО ЦНИИМФ, 2001. - 22 с.
3. Липкин И.А. Спутниковые навигационные системы. - М.: Вузовская книга, 2001. - 215 с.
4. Снопков В.И. Управление судном: учебник [для вузов] / В.И.Снопков. - [3-е изд., перераб. и доп.]. - СПб.: Профессионал, 2004. - 535 с. +1 электрон. опт.диск (CD-ROM): ил. - ISBN 5-98371-015-X:600-00; 1170-00.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления движением буксирной системы | 2015 |
|
RU2615846C1 |
| Способ управления координированной групповой деятельностью буксиров-автоматов | 2023 |
|
RU2823051C1 |
| Способ управления судном при выполнении движения по заданной траектории | 2023 |
|
RU2827122C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ ОБЪЕКТА ПРИ ВЫПОЛНЕНИИ ИМ СБЛИЖЕНИЯ С ДРУГИМ ПОДВИЖНЫМ ОБЪЕКТОМ | 2006 |
|
RU2356784C2 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖУЩИМСЯ ОБЪЕКТОМ | 2004 |
|
RU2263606C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ СУДНА ПО ЗАДАННОЙ ТРАЕКТОРИИ | 2012 |
|
RU2509679C1 |
| Способ управления судном при выполнении движения по заданной траектории | 2019 |
|
RU2713434C1 |
| Буксировочное судно | 1986 |
|
SU1662895A1 |
| СПОСОБ КООРДИНИРОВАННОГО МАНЕВРИРОВАНИЯ СУДНА | 2010 |
|
RU2429161C1 |
| СПОСОБ УПРАВЛЕНИЯ СУДНОМ ПРИ ВЫПОЛНЕНИИ ИМ ШВАРТОВНОЙ ОПЕРАЦИИ К БОРТУ СУДНА ПАРТНЕРА | 2008 |
|
RU2375249C1 |
Изобретение относится к водному транспорту и может быть использовано для управления траекторией движения буксируемого судна при выполнении буксирной операции. В способе управления траекторией движения буксируемого судна определяют координаты носовой и кормовой точек, расположенных в его диаметральной плоскости. Также вычисляют отклонения данных точек буксируемого судна от линии диаметральной плоскости буксирующего судна и по результатам вычислений определяют величину сигнала управления. На основе величины сигнала производят перекладку руля на буксируемом судне. Решение направлено на повышение безопасности при выполнении буксирной операции. 5 ил.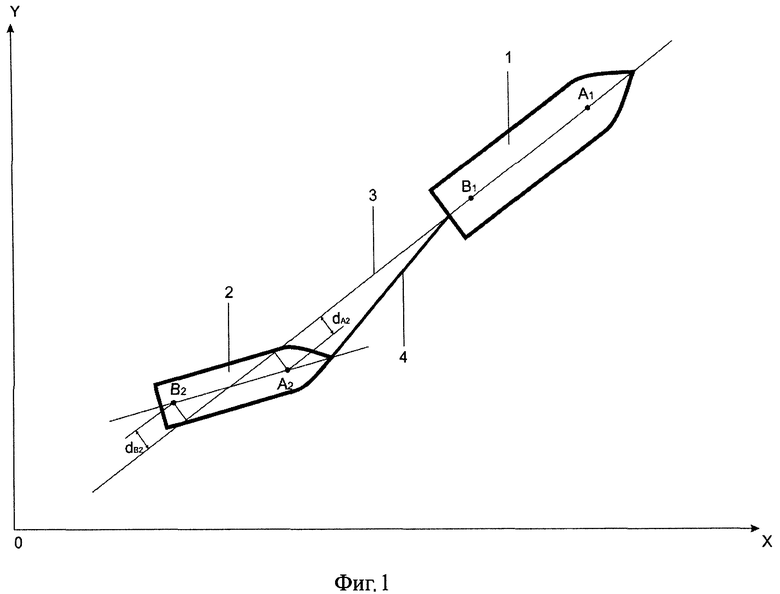
Способ управления траекторией движения буксируемого судна, основанный на определении координат расположенных в его диаметральной плоскости носовой и кормовой точек, заключающийся в том, что вычисляют отклонения носовой и кормовой точек буксируемого судна от линии диаметральной плоскости (ДП) буксирующего судна, при этом линия ДП проведена через носовую и кормовую точки буксирующего судна, по результатам вычислений определяют величину сигнала управления, в соответствии с его значением производят перекладку руля на буксируемом судне.
| СПОСОБ УПРАВЛЕНИЯ ДВИЖУЩИМСЯ ОБЪЕКТОМ | 2004 |
|
RU2263606C1 |
| Холодильная установка | 1985 |
|
SU1262215A1 |
| CA 1274298 A1, 18.09.1990 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ХОДА ТРАЛА И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ХОДА ТРАЛА | 2004 |
|
RU2281649C2 |
| US 4532617 A, 30.07.1985 | |||
| СПОСОБ ПРОИЗВОДСТВА НЕКУРИТЕЛЬНОГО ИЗДЕЛИЯ ИЗ МАХОРКИ | 2011 |
|
RU2441411C1 |

