Изобретение относится к управлению движением судна при следовании по заданной траектории и касается автоматического управления рулем или другим рулевым средством управления, которым оборудовано судно.
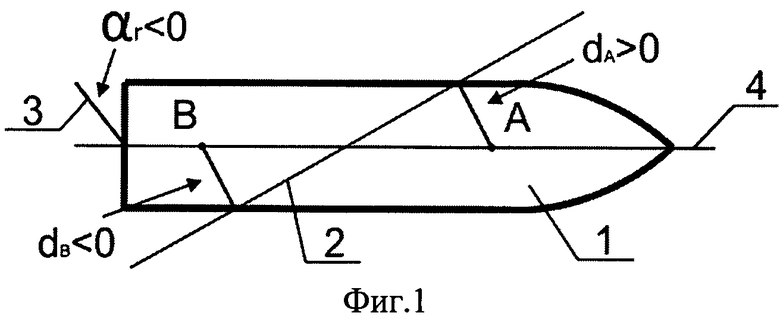
Известен способ управления движущимся объектом, например судном (Пат. РФ №22663606, опубл. 10.11.2005), по величине поперечных смещений двух точек, разнесенных по длине судна в его диаметральной плоскости (ДП) и называемых условно носовой (точка А на фиг.1-4) и кормовой (точка В на фиг.1-4).
Расстояние между точками А и В выбирают в зависимости от технической возможности размещения в этих точках приемных антенн спутниковой навигационной системы (СНС). Чем больше это расстояние, тем качественнее работа системы управления движением судна по заданной траектории.
Координаты этих точек определяют непрерывно с высокой точностью (±1,0 м), в связи с введением в СНС береговых станций, вычисляющих и передающих на судно дифференциальные поправки.
Значения координат позволяют непрерывно вычислять поперечные смещения точки А (dA) и точки В (dB) от заданной траектории. Причем поперечное смещение каждой точки от заданной траектории считается положительным, если она смещается вправо, и отрицательным, если она смещается влево (фиг.1-4).
Возникающие поперечные смещения вырабатывают сигнал на отклонение рулевого органа, например руля судна, по закону:


где kA, kB - коэффициенты усиления по поперечным смещениям носовой и кормовой точек судна от заданной траектории. Это положительные величины, причем dA больше kB. Угол α перекладки руля считается положительным при его перемещении в сторону правого борта.
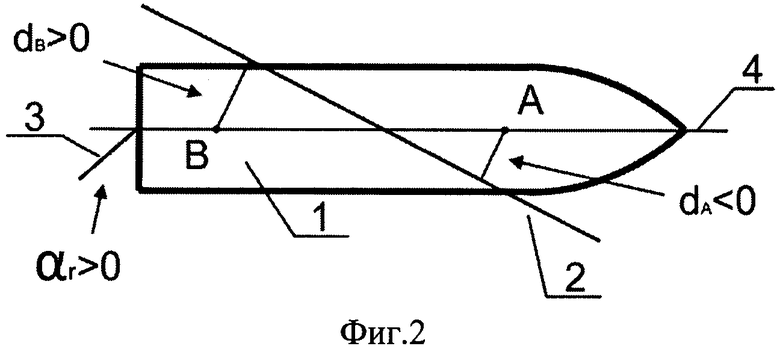
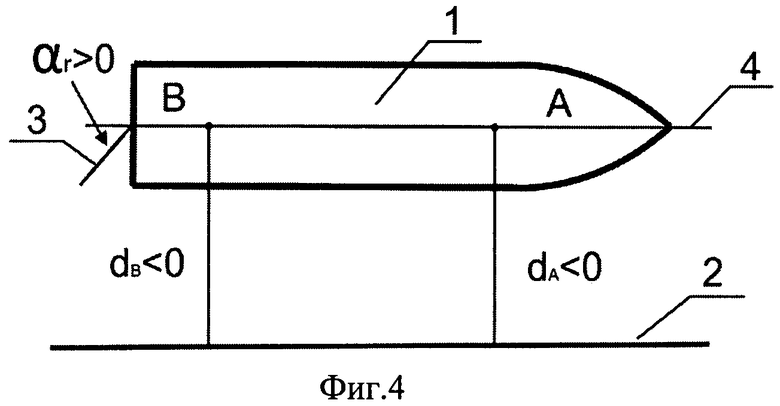
На фиг.1-4 изображены основные варианты возможных отклонений судна 1 от заданной траектории 2 и управление в каждом из них (угол α перекладки руля 3). Например, на фиг.1, 2 ДП 4 судна 1 пересекает заданную траекторию 2 под некоторым углом, величина которого характеризуется значениями поперечных смещений точки А (dA) и точки В (dB), причем dA больше 0, dB меньше 0 (фиг.1) и dA меньше 0, dB больше 0 (фиг.2). В первом случае (фиг.1.) согласно закону (1) угол α отклонения руля будет иметь отрицательное значение, т.е. руль будет переложен на левый борт и судно начнет поворот влево, что приведет к уменьшению dA и dB и в конечном итоге к выходу судна на заданную траекторию; во втором случае (фиг.2) согласно закону (1) угол α отклонения руля будет иметь положительное значение, т.е. руль будет переложен на правый борт и судно начнет поворот вправо, что приведет к уменьшению dA, dB и к выходу судна на заданную траекторию.
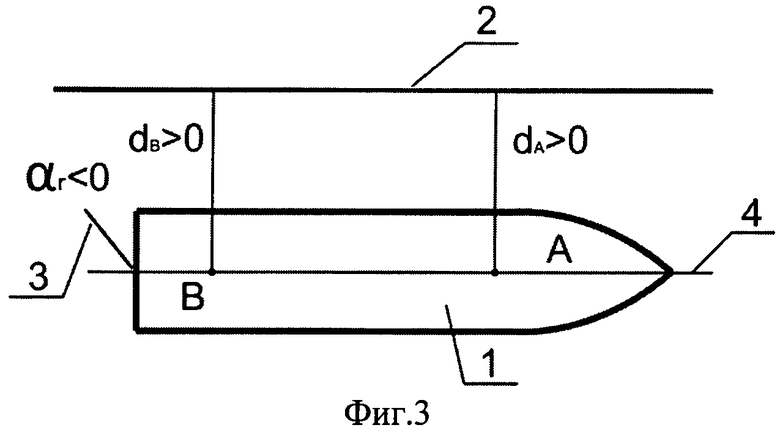
На фиг.3, 4 ДП 4 судна 1 не пересекает заданную траекторию 2, а поперечные смещения точек А, В имеют одинаковые знаки, положительные (фиг.3) и отрицательные (фиг.4). Знак и соответствующее направление угла α перекладки руля зависят от соотношения значений коэффициентов kA и kB (kA больше kB, если знаки поперечных смещений точек А и В одинаковы, фиг.3, 4; kA и kB будут равны по величине, если знаки поперечных смещений точек А и В противоположны, фиг.1, 2). Соотношение значений коэффициентов kA, kB может выбираться из различных соображений. Например, если считать, что отклонение направления движения судна от заданного будет находиться в пределах ±90°, то указанное соотношение определяется выражением:

где l - расстояние между точками А и В.
Однако предложенный закон управления рулевым устройством (1) не учитывает инерционных особенностей как рулевого устройства, так и самого объекта управления судна. Поэтому его применение не позволит качественно управлять судном, а в ряде случаев может привести к потере его управляемости из-за неконтролируемого изменения отклонений точек А и В от заданной траектории.
Цель изобретения - повышение точности удержания судна на заданной траектории и улучшение качества управления, в частности, исключение вероятности потери управляемости.
Для достижения поставленной цели предлагается способ, основанный на законе управления, который определяет скорость 

где где kA, kB - коэффициенты усиления по поперечным смещениям носовой и кормовой точек судна от заданной траектории, kα -коэффициент усиления.
При этом действует ограничение на величину угла αr перекладки руля, который не должен превосходить максимального значения, характерного для конкретного рулевого устройства рассматриваемого судна, т.е. αr<αrmax.
Предлагаемый способ управления состоит в выработке управляющего сигнала sign, величина которого определяет скорость перекладки руля (или любого другого рулевого органа), то есть

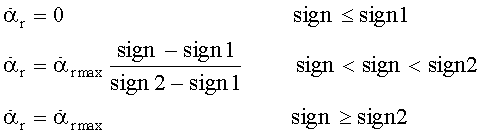
Зависимость скорости
Этот закон управления достаточно универсален и содержит зону нечувствительности (sign<sign), зону насыщения (sign>sign2) и переходную между ними зону (sign1<sign<sign2) линейного изменения скорости
Как видно из выражения (4), инерция самого судна учитывается явным образом добавлением в закон управления члена, который зависит от текущего положения αr пера руля.
Изобретение относится к управлению судном при следовании по заданной траектории и касается автоматического управления рулём или другим рулевым средством управления, которым оборудовано судно. Управление осуществляют по величинам поперечных смещений носовой А и кормовой В точек. Точки А и В разнесены по длине судна в его диаметральной плоскости (ДП). Производят выработку управляющего сигнала и в зависимости от его величины определяют скорость перекладки руля. При этом необходимо соблюдать ограничение - угол перекладки руля не должен превышать его максимальное значение, характерное для конкретного рулевого устройства. Повышена точность удержания судна на заданной траектории, улучшено качество управления и исключена вероятность потери управляемости. 1 з.п. ф-лы, 5 ил.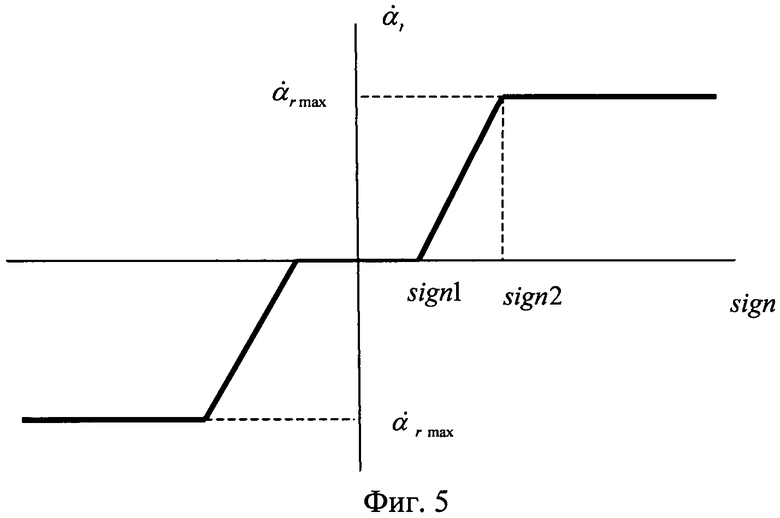
1. Способ управления движением судна по заданной траектории по величинам поперечных смещений двух точек, разнесенных по длине судна в его диаметральной плоскости и условно называемых носовой А и кормовой В, характеризующийся тем, что производят выработку управляющего сигнала sign:

kA, kB - коэффициенты усиления по поперечным смещениям носовой А и кормовой В точек судна от заданной траектории;
dA, dB - значения поперечных смещений соответственно точек А и В;
kα - коэффициент усиления,
αr - угол перекладки руля,
в зависимости от величины управляющего сигнала sign определяют скорость перекладки руля, в частности для sign>0:
2. Способ по п.1, отличающийся тем, что необходимо соблюдать ограничение - угол перекладки руля не должен превышать его максимальное значение, характерное для конкретного рулевого устройства.
| Способ управления траекторией движения судна | 1980 |
|
SU908656A1 |
| Способ управления траекторией движения судна | 1983 |
|
SU1102714A1 |
| US 7438013 B2, 21.10.2008. | |||

