Изобретение относится к способам и устройствам для полунатурного моделирования систем управления (СУ) с головками самонаведения (ГСН) воздушных и космических летательных аппаратов (ЛА), проведения испытаний и проверки работоспособности и управляемости головок самонаведения ЛА, а также для отладки программно-алгоритмического обеспечения бортовых цифровых вычислительных машин (БЦВМ), входящих в состав СУ ЛА и ГСН ЛА.
Способ полунатурного моделирования системы самонаведения ЛА и устройство для его реализации позволяют проводить отработку взаимодействия всех бортовых систем ЛА, участвующих в работе систем управления и самонаведения ЛА, отладку программно-алгоритмического обеспечения БЦВМ ГСН в реальном масштабе времени во всем диапазоне угловых скоростей линии визирования «ЛА-цель» и углов поворота ГСН без искажения динамики контура системы самонаведения ЛА, с имитацией радиошумовой обстановки.
Известен способ полунатурного моделирования систем самонаведения ЛА (Петров Г.М., Луканин Н.Б., Бартольд Э.Е. Методы моделирования систем управления на аналоговых и аналого-цифровых вычислительных машинах. М.: Машиностроение, 1975, стр. 189-194, рис. 4.9), заключающийся в механическом перемещении узла цели, который воспроизводит перемещение цели в пространстве относительно ЛА, а также излучение, исходящее от цели.
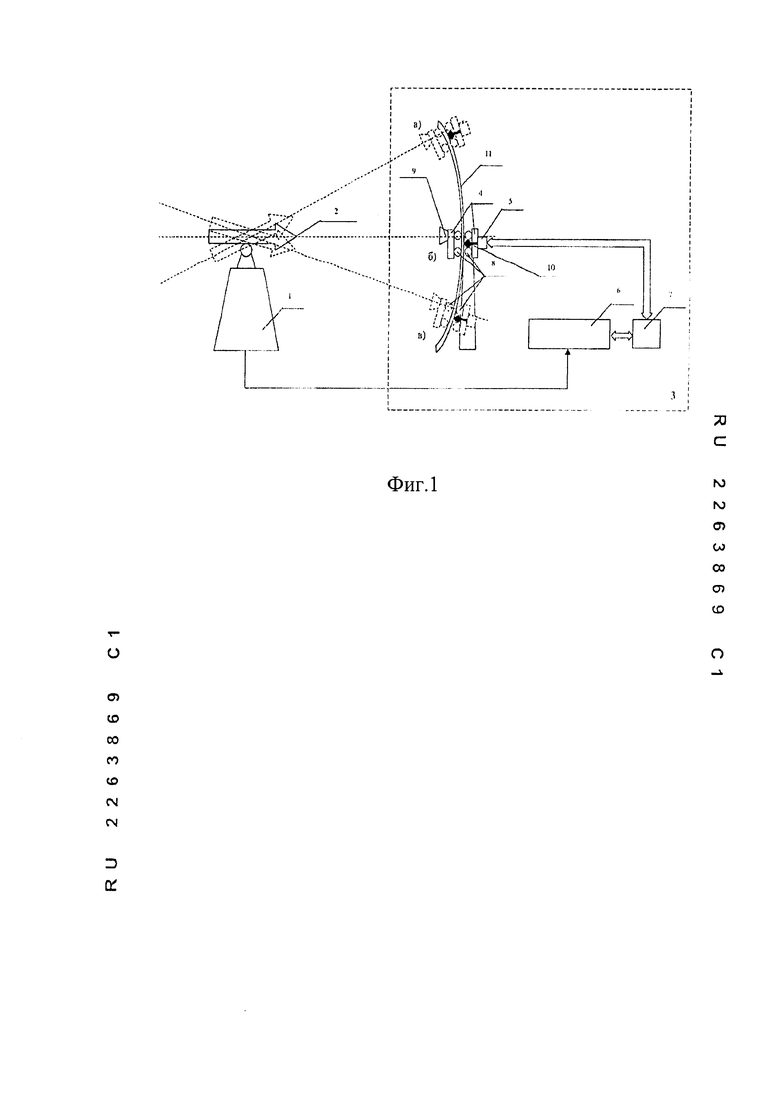
Известено устройство (RU (11) 119087 (13)U1, F41G 3/32, G09B 9/08, G06B 7/48 2012) для реализации способа (фиг. 1), содержащее головку наведения 2, динамический стенд воспроизведения углового движения головки наведения 1, радиоимитатор цели 3, включающий излучатель сигналов 9, последовательно соединенные блок управления полунатурного моделирования функционирования головки наведения 6, вход которого подключен к выходу динамического стенда воспроизведения углового движения головки наведения, две платформы 4, колеса платформ с приводом 8, блок передачи сигналов управления платформой и определения ее местоположения 7, блок приема сигналов управления платформой и определения ее местоположения 5, электропривод платформы 10 и полусферы 11, при этом колеса платформ с приводом выполнены из магнитного материала, полусфера из магнитопроницаемого материала, а платформы расположены по обе стороны полусферы с зеркальной симметрией относительно друг друга и прижаты магнитным притяжением друг к другу. Узел цели воспроизводит перемещение цели в пространстве и излучение, приходящее от нее на ГСН.
Моделирующий комплекс позволяет исследовать динамическую точность системы самонаведения как при наличии, так и отсутствии обтекателя ГСН и выявлять вносимые обтекателем погрешности. Недостатком данного моделирующего комплекса является то, что вследствие инерционности электропривода платформы с излучателем сигналов полоса пропускания системы управления испытательного стенда узка по сравнению с полосой пропускания моделируемой системы самонаведения ЛА. Поэтому на малых дальностях между ЛА и целью, когда резко возрастает угловая скорость линии визирования «ЛА-цель», устойчивость системы управления стенда нарушается раньше, чем нарушается кинематическая устойчивость системы самонаведения ЛА. Кроме того, отсутствует имитация радиошумовой обстановки, а также комплекс отличается большой громоздкостью, энергоемкостью, сложностью наладки и эксплуатации.
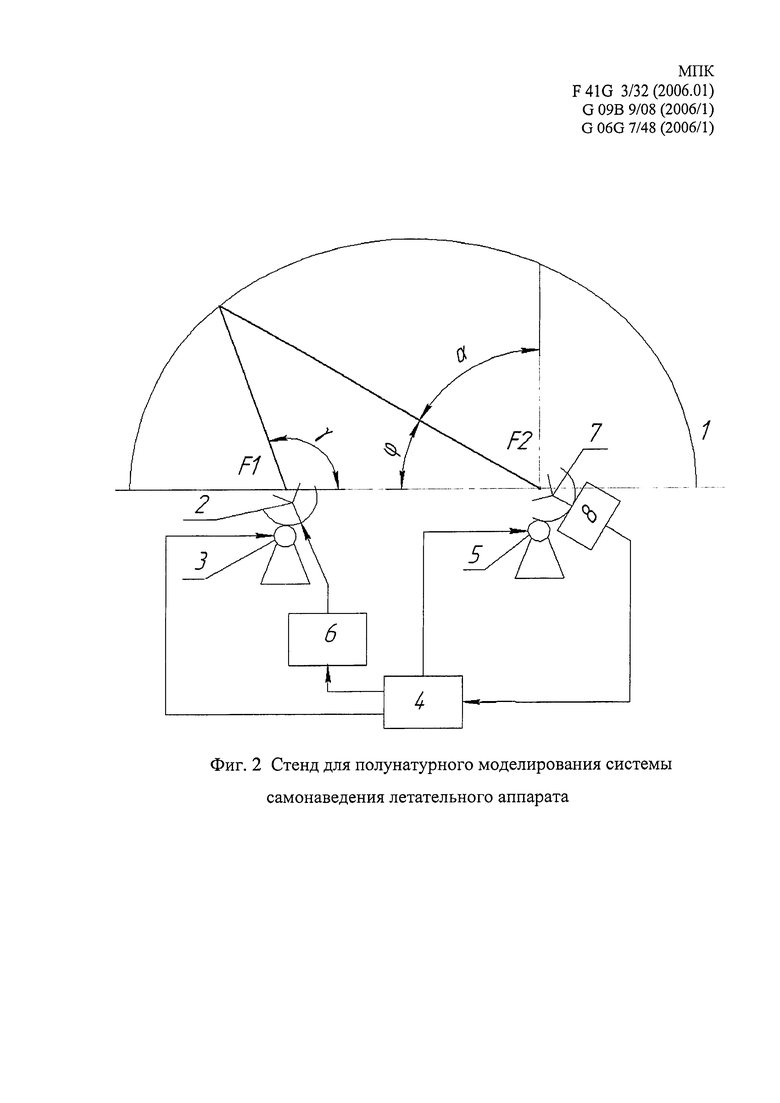
В качестве прототипа устройства рассмотрен моделирующий комплекс системы самонаведения летательного аппарата (RU 2263869, F41G 3/26, G09B 9/08. 2005), содержащий (фиг. 2) отражатель 1, выполненный в виде усеченного эллипсоида вращения, в фокусе F1 которого расположен источник сигналов 2, установленный на двухстепенном поворотном стенде 3, вход которого соединен с первым выходом вычислительно-моделирующего устройства 4, а в фокусе F2 расположен динамический поворотный стенд 5, вход которого соединен со вторым выходом вычислительно-моделирующего устройства 4. Источник сигналов 2 соединен с выходом перестраиваемого генератора электромагнитных волн 6, вход которого соединен с третьим выходом вычислительно-моделирующего устройства 4. В состав стенда входит вычислительно-моделирующее устройство 4, на вход которого поступают сигналы с установленного на динамическом поворотном стенде 5 автопилота 8 совместно с исследуемой ГСН 7 и которое предназначено для вычисления параметров движения ЛА, цели и их совместного движения, а также для управления процессом полунатурного моделирования ГСН.
В моделирующем комплексе прототипа система управления перемещением излучателя сигналов в процессе эксперимента задействована в замкнутом контуре системы самонаведения ЛА, что искажает динамику всего контура самонаведения ЛА и вносит ошибки в оценки собственно динамических параметров контура самонаведения ЛА.
Техническая новизна предлагаемого способа полунатурного моделирования системы самонаведения ЛА и устройства для его реализации заключается в том, что вместо механически перемещающегося излучателя сигналов (фиг. 2) используется плоская активная фазированная антенная решетка (АФАР), сегмент которой, сформированный из излучающих элементов АФАР и имеющий размер n×m элементов, перемещается по плоскости решетки и излучает полезный сигнал, а перпендикуляр к фазовому фронту сегмента, вдоль которого производится излучение полезного сигнала, всегда направлен на ГСН, установленной на динамическом поворотном стенде. Это достигается путем задержки по фазе излучения каждого излучающего элемента сегмента в зависимости от положения сегмента на АФАР, которая рассчитывается в вычислительно-моделирующем устройстве таким образом, чтобы перпендикуляр к фазовому фронту сегмента АФАР, вдоль которого осуществляется излучение сигнала, всегда был направлен на ГСН. При этом перемещение сегмента вдоль плоскости АФАР воспроизводит взаимное угловое положение ЛА и цели. Дополнительно на плоскости АФАР могут быть созданы другие сегменты, перемещающиеся вдоль плоскости АФАР, излучающие сигналы в направлении ГСН и имитирующие: помехи прикрытия, самоприкрытия, уводящие помехи, доплеровский шум и др., что позволяет воспроизвести радиошумовую обстановку для ГСН, близкую к реальной практически во всем диапазоне углового перемещения антенны ГСН ЛА
Сущность изобретения заключается в следующем. Ее задачей является разработка и создание стенда, позволяющего существенно расширить полосу пропускания системы управления испытательного стенда, значительно минимизировать амплитудно - фазочастотные искажения, вносимые стендом в испытываемый контур системы самонаведения ЛА, обеспечить исследование в процессе полунатурного моделирования технических характеристик системы самонаведения ЛА во всем диапазоне имитируемых без искажений угловых скоростей линии визирования головки самонаведения ЛА с имитацией радиошумовой обстановки. Технический результат при использовании изобретения выражается в повышении достоверности полунатурного моделирования систем самонаведения ЛА, в расширении функциональных возможностей испытательного стенда за счет обеспечения имитации угловых скоростей линии визирования головки самонаведения ЛА без динамических искажений в пределах полосы пропускания исследуемой системы, расширении функциональных возможностей испытательного стенда в части возможности воспроизведения радиошумовой обстановки: флюктуации полезного сигнала, помех прикрытия, самоприкрытия, уводящих помех, доплеровского шума и др.
Указанный технический результат достигается тем, что в известный испытательный стенд (RU 2263869, F41G 3/26, G09B 9/08. 2005), содержащий (фиг. 2) головку наведения, двухстепенной поворотный стенд, который по командам вычислительно-моделирующего устройства воспроизводит угловое движение корпуса ЛА, согласно изобретению вместо излучателя сигналов, установленного на двухстепенном поворотном стенде, и отражателя, представляющего собой половину эллипсоида вращения с двумя фокусами F1 и F2, усеченного плоскостью симметрии, использована плоская активная фазированная антенная решетка (АФАР). Излучатель сигналов вместо вращательного движения на двухстепенном поворотном стенде имитируется излучающим сегментом АФАР, перемещающимся по командам вычислительно-моделирующего устройства по плоскости решетки таким образом, что перпендикуляр к фазовому фронту сегмента АФАР, в направлении которого происходит излучение полезного сигнала, всегда направлен на ГСН, установленную на двухстепенном поворотном стенде, воспроизводящем угловое движение корпуса ЛА, а движение в пространстве перпендикуляра к фазовому фронту сегмента АФАР, перемещающегося по плоскости решетки, воспроизводит взаимное угловое положение ЛА и цели (фиг. 3).
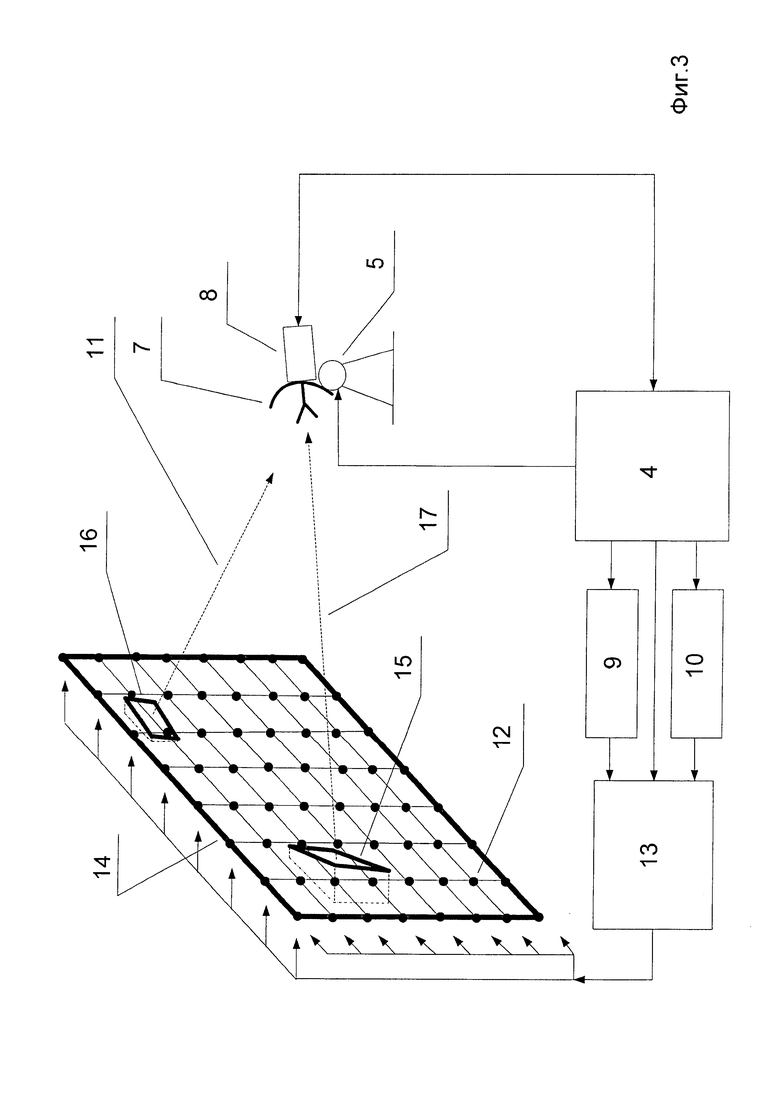
Изобретение поясняется чертежами, на которых представлена структурная схема стенда для полунатурного моделирования системы самонаведения ЛА (фиг. 3).
Техническая новизна предлагаемого изобретения заключается в том, что вместо излучателя сигналов, установленного на двухстепенном поворотном стенде, воспроизводящем взаимное угловое положение ЛА и цели, совместно с отражателем, имеющим форму усеченного эллипсоида вращения, введена плоская активная фазированная антенная решетка (АФАР), сегмент которой, сформированный из излучающих элементов АФАР и имеющий размер n×m излучающих элементов, перемещается по плоскости решетки и излучает полезный сигнал, причем фазовый фронт сегмента АФАР ориентируется таким образом, что перпендикуляр к фазовому фронту сегмента АФАР, вдоль которого производится излучение полезного сигнала (направление излучения), направлен всегда на ГСН, а фазовая задержка излучения каждого излучающего элемента сегмента определяет требуемое положение фазового фронта сегмента. При этом перемещение сегмента вдоль плоскости АФАР воспроизводит взаимное угловое положение ЛА и цели. Дополнительно на плоскости АФАР могут быть созданы другие сегменты, перемещающиеся вдоль плоскости АФАР, излучающие сигналы в направлении ГСН и имитирующие: помехи прикрытия, самоприкрытия, уводящие помехи, доплеровский шум и др., что позволяет воспроизвести радиошумовую обстановку для ГСН, близкую к реальной практически во всем диапазоне углового перемещения антенны ГСН ЛА. Данная конструкция стенда исключает механическое перемещение излучателя сигналов, что сводит практически к нулю любое запаздывание, в воспроизведении взаимного движения ЛА - цель. Запаздывание будет определяться практически временем расчета на вычислительно-моделирующем устройстве задержки по фазе излучения для каждого излучающего элемента сегмента АФАР и временем переключения излучающих элементов сегмента АФАР, что несоизмеримо мало по сравнению с запаздыванием, вызванным постоянной времени двигателя динамического стенда, осуществляющего перемещение излучателя сигналов.
Стенд для полунатурного моделирования ГСН (фиг. 3) содержит плоскую активную фазированную антенную решетку 14, представляющую набор излучающих элементов 12, имеющих квадратную или треугольную форму расположения на плоскости решетки, из которых формируются сегменты: один сегмент 15 - формирующий полезный сигнал и другие сегменты, формирующие сигналы радиошумовой обстановки. На фиг. 3 показан один из таких сегментов 16. Излучения 17 и 11 каждого из сегментов направлены всегда в сторону ГСН 7, которая совместно с инерциальной системой управления 8 установлена на динамическом поворотном стенде 5, вход которого соединен с первым выходом вычислительно-моделирующего устройства 4, на вход которого поступают сигналы с инерциальной системы управления 8. Второй и третий выходы вычислительно-моделирующего устройства 4 соединены со входами имитатора цели 9 и имитатора шумовых помех 10, с выходов которых сигналы передаются на первый и второй входы устройства переключения излучающих элементов 13, которое под управлением вычислительно-моделирующего устройства 4, четвертый выход которого подсоединен к третьему входу устройства переключения излучающих элементов 13, распределяет сигналы на излучающие элементы 12, что показано условно.
Стенд для полунатурного моделирования ГСН работает следующим образом.
Вычислительно-моделирующее устройство 4 в общем виде решает уравнения динамики ЛА и пространственного движения ЛА, движения цели и их взаимного движения и, как следствие, формирует сигналы, пропорциональные угловым скоростям движения ЛА вокруг центра масс ЛА  и углам ориентации ЛА в пространстве ϕiЛА, которые поступают на динамический поворотный стенд 5, на котором установлена исследуемая ГСН 7 совместно с инерциальной системой управления 8. Одновременно вычислительно-моделирующее устройство 4, решая уравнения движения цели относительно ЛА, определяет данные:
и углам ориентации ЛА в пространстве ϕiЛА, которые поступают на динамический поворотный стенд 5, на котором установлена исследуемая ГСН 7 совместно с инерциальной системой управления 8. Одновременно вычислительно-моделирующее устройство 4, решая уравнения движения цели относительно ЛА, определяет данные:
- положение цели в пространстве относительно ЛА и соответствующее положение излучающего полезный сигнал сегмента 15 на плоскости АФАР, который формируется из излучающих элементов АФАР 12 и имеет размер n×m элементов,
- задержку по фазе излучения каждого излучающего элемента сегмента АФАР 12, которая определяет положение фазового фронта сегмента таким образом, чтобы перпендикуляр к фазовому фронту сегмента 17 был направлен на ГСН,
- изменение частоты полезного сигнала в функции вычисленной взаимной скорости ЛА и цели, что необходимо для имитации эффекта Допплера,
- мощность полезного сигнала в функции вычисленного расстояния между ЛА и целью,
- флюктуации полезного сигнала.
Эти данные (фиг. 3) поступают на устройство переключения излучающих элементов АФАР 13, а также на имитатор цели 9, сигналы которого через устройство переключения излучающих элементов АФАР 13 подаются на излучающие элементы 12 АФАР, совокупность которых, рассчитанная в вычислительно-моделирующем устройстве 4, составляет сегмент 15, расположение которого на решетке АФАР определяет пространственное положение цели относительно ЛА, а положение фазового фронта сегмента, обусловленное задержкой по фазе излучения каждого излучающего элемента сегмента, обеспечивает направление распространения излучения по перпендикуляру к фазовому фронту сегмента в сторону ГСН.
Дополнительно вычислительно-моделирующее устройство 4 вычисляет параметры заранее установленного типа радиошумовой обстановки, подает вычисленные параметры на перестраиваемый имитатор шумовых помех 10, управляет теми же переключателями элементов АФАР 12, которые формируют дополнительные сегменты (показан один из них 16), излучающие сигналы радиошумовой обстановки, направление излучения которых 11 также всегда направлено в сторону ГСН.
Использование способа полунатурного моделирования системы самонаведения ЛА и устройства для его реализации позволяют проводить отработку взаимодействия всех бортовых систем ЛА, участвующих в работе систем управления и самонаведения ЛА, отладку программно-алгоритмического обеспечения БЦВМ ГСН в реальном масштабе времени во всем диапазоне угловых скоростей линии визирования «ЛА-цель» без искажения динамики контура системы самонаведения ЛА, с имитацией радиошумовой обстановки. Предложенные способ полунатурного моделирования системы самонаведения ЛА и устройство для его реализации позволяют в отдельных случаях осуществлять замену натурных испытаний полунатурным моделированием, что обеспечивает значительный экономический эффект.
Источники информации
1. Петров Г.М., Луканин Н.Б., Бартольд Э.Е. Методы моделирования систем управления на аналоговых и аналого-цифровых вычислительных машинах. М.: Машиностроение, 1975, стр. 189-194, рис. 4.9.
2. RU (11) 119087 (13)U1, F41G 3/32, G09B 9/08, G06B 7/48 2012.
3. RU 2263869, F41G 3/26, G09B 9/08. 2005.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ полунатурного моделирования системы управления летательного аппарата с пассивной или полуактивной или активной головкой самонаведения и устройство для его реализации | 2020 |
|
RU2767956C2 |
| УСТРОЙСТВО ДЛЯ ПОЛУНАТУРНОГО МОДЕЛИРОВАНИЯ СИСТЕМЫ УПРАВЛЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА С АКТИВНЫМИ ГОЛОВКАМИ САМОНАВЕДЕНИЯ | 2018 |
|
RU2692456C1 |
| СТЕНД ДЛЯ ПОЛУНАТУРНОГО МОДЕЛИРОВАНИЯ СИСТЕМЫ САМОНАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2015 |
|
RU2637096C2 |
| СТЕНД ДЛЯ ПОЛУНАТУРНОГО МОДЕЛИРОВАНИЯ СИСТЕМЫ САМОНАВЕДЕНИЯ ЛЕТАТЕЛЬНОГО АППАРАТА | 2007 |
|
RU2338992C1 |
| Устройство полунатурного моделирования системы управления беспилотным летательным аппаратом с радиолокационным визиром | 2015 |
|
RU2629709C2 |
| Стенд полунатурного моделирования движения летательного аппарата с цифровой системой управления | 2022 |
|
RU2786280C1 |
| СПОСОБ И КОМПЛЕКС ОЦЕНКИ ПОМЕХОУСТОЙЧИВОСТИ ТЕЛЕВИЗИОННОЙ ГОЛОВКИ САМОНАВЕДЕНИЯ УПРАВЛЯЕМОГО БОЕПРИПАСА | 2020 |
|
RU2751144C1 |
| СПОСОБ И КОМПЛЕКС ОЦЕНКИ НА ПОЛУНАТУРНОЙ МОДЕЛИ ЭФФЕКТИВНОСТИ РАДИОПОДАВЛЕНИЯ РАДИОЛОКАЦИОННОЙ ГОЛОВКИ САМОНАВЕДЕНИЯ УПРАВЛЯЕМОЙ РАКЕТЫ | 2018 |
|
RU2695496C1 |
| Активная головка самонаведения | 2018 |
|
RU2689276C1 |
| ДВУХСТЕПЕННОЙ ДИНАМИЧЕСКИЙ ИМИТАТОР ЦЕЛЕЙ | 2005 |
|
RU2273890C1 |
Изобретение относится к моделированию систем управления (СУ) с головками самонаведения (ГСН) воздушных и космических летательных аппаратов (ЛА). Используется плоская активная фазированная антенная решетка (АФАР), сегмент которой, сформированный из излучающих элементов АФАР и имеющий размер n×m элементов, перемещается по плоскости решетки, воспроизводя тем самым взаимное перемещение летательного аппарата и цели, и излучает полезный сигнал, имитирующий отраженный сигнал от цели. Причем фазовый фронт сегмента АФАР ориентируется таким образом, что перпендикуляр к фазовому фронту сегмента АФАР, вдоль которого производится излучение полезного сигнала, направлен всегда на головку самонаведения (ГСН), установленную на динамическом поворотном стенде, а также, кроме того, позволяет сформировать дополнительные сегменты, излучающие сигналы, также направленные всегда на ГСН и имитирующие радиошумовую обстановку для ГСН, близкую к реальной практически во всем диапазоне углового перемещения антенны ГСН ЛА. Технический результат заключается в расширении полосы пропускания и минимизации амплитудно-фазовых искажений. 2 н.п. ф-лы, 3 ил.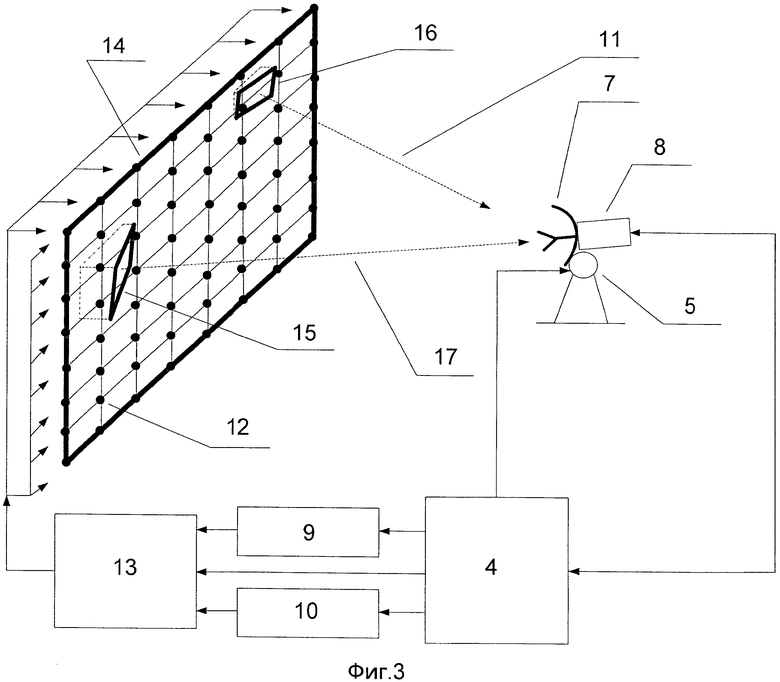
1. Способ, предназначенный для полунатурного моделирования системы самонаведения летательного аппарата (ЛА), отличающийся тем, что вместо механически перемещающегося излучателя сигналов используется плоская активная фазированная антенная решетка (АФАР), сегмент которой, сформированный из излучающих элементов АФАР и имеющий размер n×m элементов, перемещается по плоскости решетки, воспроизводя тем самым взаимное перемещение летательного аппарата и цели, и излучает полезный сигнал, имитирующий отраженный сигнал от цели, причем фазовый фронт сегмента АФАР ориентируется таким образом, что перпендикуляр к фазовому фронту сегмента АФАР, вдоль которого производится излучение полезного сигнала, направлен всегда на головку самонаведения (ГСН), установленную на динамическом поворотном стенде, а также позволяет сформировать дополнительные сегменты, излучающие сигналы, также направленные всегда на ГСН и имитирующие радиошумовую обстановку для ГСН, близкую к реальной практически во всем диапазоне углового перемещения антенны ГСН ЛА.
2. Стенд для полунатурного моделирования системы самонаведения летательного аппарата, отличающийся тем, что вместо механически перемещающегося излучателя сигналов введена плоская активная фазированная антенная решетка (АФАР), представляющая набор излучающих элементов, из которых формируются сегменты, излучающие полезный сигнал, имитирующий сигнал цели и другие сегменты, излучающие сигналы радиошумовой обстановки, причем излучения каждого из сегментов направлены всегда в сторону головки самонаведения (ГСН), которая совместно с инерциальной системой управления установлена на динамическом поворотном стенде, вход которого соединен с первым выходом вычислительно-моделирующего устройства, на вход которого поступают сигналы с инерциальной системы управления, второй и третий выходы вычислительно-моделирующего устройства соединены со входами имитатора цели и имитатора шумовых помех, с выходов которых сигналы передаются на первый и второй входы устройства переключения излучающих элементов, которое под управлением вычислительно-моделирующего устройства, четвертый выход которого подсоединен к третьему входу устройства переключения излучающих элементов, распределяет сигналы на излучающие элементы АФАР.
| ИСПЫТАТЕЛЬНЫЙ СТЕНД | 2004 |
|
RU2263869C1 |
| ИСПЫТАТЕЛЬНЫЙ СТЕНД | 2002 |
|
RU2207485C1 |
| US 5215465 A, 01.06.1993 | |||
| US 4349337 А, 14.09.1982. | |||

