Техническое решение относится к подъемно-транспортной технике и предназначено для защиты стреловых грузоподъемных кранов от повреждений при работе в стесненных условиях (координатная защита) и защиты от опасного приближения к линии электропередачи.
Известен способ защиты грузоподъемного крана от недопустимого приближения его стрелы к линии электропередачи (ЛЭП) путем размещения на стреле чувствительного элемента (антенны), выявления переменного электрического напряжения на чувствительном элементе, а также последующего усиления, фильтрации и преобразования этого напряжения в сигналы аварийной сигнализации или блокировки движений крана в случае превышения этим напряжением установленного порогового уровня [1], [2].
Устройство для защиты грузоподъемного крана от недопустимого приближения к ЛЭП, реализующее данный способ, содержит размещенный на стреле чувствительный элемент (антенну) и электронный блок, вход которого подключен к чувствительному элементу, а выход соединен с входом устройства аварийной сигнализации или блокировки движений крана, причем электронный блок содержит последовательно соединенные блоки усиления, фильтрации и преобразования выходного сигнала чувствительного элемента (антенны) [1], [2].
Недостатком этого способа и реализующего его устройства является отсутствие защиты грузоподъемного крана от столкновений с препятствиями, не находящимися под напряжением, - отсутствие координатной защиты. Кроме того, в данном техническом решении контроль приближения к ЛЭП осуществляется по величине переменного напряжения, наводимого в чувствительном элементе (антенне). По этой причине не обеспечивается защита от приближения к ЛЭП постоянного тока.
Более совершенным и наиболее близким к предложенному является способ защиты грузоподъемного крана от недопустимых перемещений его стрелы путем размещения на стреле чувствительного элемента (антенны), выявления переменного электрического напряжения на чувствительном элементе, а также последующего усиления, фильтрации и преобразования этого напряжения в сигналы аварийной сигнализации или блокировки движений крана в случае превышения этим напряжением установленного порогового уровня, а также ручного задания зоны допустимых положений стрелы, измерения угла наклона, угла азимута и длины стрелы, вычисления на основании измеренных значений действительного положения стрелы, сравнения этого положения с зоной допустимых положений и, в случае перехода стрелы за пределы допустимых положений, дополнительного формирования сигналов аварийной сигнализации или блокировки движений крана [3], [4], [5].
Устройство для реализации известного способа и наиболее близкое к предложенному содержит размещенный на стреле чувствительный элемент (антенну) и электронный блок, вход которого подключен к чувствительному элементу, а выход соединен с входом устройства аварийной сигнализации или блокировки движений крана, причем электронный блок содержит блоки усиления и фильтрации сигналов чувствительного элемента и блок преобразования сигналов (цифровой вычислительный модуль), а также блок задания допустимых положений стрелы (блок задания ограничений координатной защиты), датчики угла наклона, угла азимута и длины стрелы грузоподъемного крана, подключенные к входам блока преобразования сигналов [3], [4], [5].
В данном техническом решении обеспечивается защита как от опасного приближения к ЛЭП, так и координатная защита.
Однако не обеспечивается защита от приближения к ЛЭП постоянного тока. Кроме того, отсутствует автоматический ввод задания ограничений по координатной защите. Поэтому в случае неправильного задания или отсутствия задания этих ограничений не обеспечивается защита от столкновения стрелы крана с препятствиями.
В известном техническом решении не обеспечивается также защита от столкновения с движущимися препятствиями, например со стрелой другого рядом работающего крана, поскольку оператор не имеет возможности изменять ограничения координатной защиты во время работы крана.
Кроме того, общеизвестным недостатком известного технического решения является зависимость чувствительности антенны от направления на ЛЭП (неравномерная чувствительность антенны по различным осям), а также отсутствие учета скорости движения стрелы. В частности, при высокой скорости движения стрелы, например в транспортном режиме крана (или крана-трубоукладчика), при фиксированной чувствительности устройства оператор или автоматическое устройство не успевают своевременно среагировать на опасное приближение к ЛЭП ввиду значительной инерционности крана. Дополнительно, в известном техническом решении не обеспечивается автоматическое уклонение стрелы крана от столкновения с движущимися препятствиями, например со стрелой другого крана, и не предусматривается предоставление оператору информации о расстоянии до ближайшего препятствия, а также о направлении на это препятствие.
Задачами, на решение которых направлено предложенное техническое решение, являются:
- обеспечение защиты от приближения к ЛЭП постоянного тока;
- осуществление автоматической (без участия оператора) координатной защиты крана;
- обеспечение защиты от столкновения стрелы крана с движущимися препятствиями;
- автоматическое уклонение стрелы крана от столкновения;
- обеспечение эффективной защиты грузоподъемного крана независимо от направления и скорости перемещения его стрелы;
- предоставление оператору информации о величине расстояния до ближайшего препятствия и о направлении, в котором находится это препятствие;
- обеспечение защиты грузоподъемного крана от опасного приближения стрелы к ЛЭП и к другим препятствиям в транспортном режиме.
В способе защиты грузоподъемного крана от недопустимых перемещений стрелы путем размещения на стреле чувствительного элемента, выполненного в виде электрической антенны, выявления электрического напряжения на чувствительном элементе, усиления, фильтрации и последующего преобразования этого напряжения в сигналы аварийной сигнализации или блокировки движений крана, поставленная цель достигается тем, что дополнительно осуществляют колебательные перемещения размещенного на стреле чувствительного элемента. При этом могут дополнительно осуществлять прием акустического сигнала, создаваемого колеблющимся чувствительным элементом и отраженного от окружающих грузоподъемный кран предметов, выявлять амплитуду принимаемого сигнала или сдвиг частоты принимаемого сигнала относительно частоты колебаний чувствительного элемента, определять по их величинам расстояние до окружающих грузоподъемный кран предметов или скорость их приближения к грузоподъемному крану и при уменьшении расстояния или увеличении скорости свыше допустимых значений осуществлять формирование сигнала аварийной сигнализации или блокировки движений крана.
Во втором варианте способа защиты грузоподъемного крана путем размещения на стреле чувствительного элемента, выявления электрического напряжения на чувствительном элементе, усиления, фильтрации и последующего преобразования этого напряжения в сигналы аварийной сигнализации или блокировки движений крана, поставленная цель может достигаться также путем дополнительного формирования ультразвукового излучения на стреле грузоподъемного крана в направлении окружающих грузоподъемный кран предметов, приема акустического сигнала, отраженного от окружающих грузоподъемный кран предметов при помощи размещенного на стреле чувствительного элемента, выполненного в виде акустического преобразователя, выявления амплитуды или сдвига частоты принимаемого сигнала относительно частоты сформированного ультразвукового излучения и последующего определения расстояния до окружающих грузоподъемный кран предметов или скорости их приближения к грузоподъемному крану по данной амплитуде или величине сдвига частоты, а также указанного формирования сигнала аварийной сигнализации или блокировки движений крана путем выявления уменьшения расстояния или увеличения скорости свыше допустимых значений.
Поставленная цель в предложенном способе может также достигаться за счет дополнительного формирования сигнала модуляции, воздействия этим сигналом на амплитуду или частоту колебаний чувствительного элемента и определения величины расстояния до окружающих грузоподъемный кран предметов путем измерения времени запаздывания принимаемого сигнала относительно сигнала модуляции.
Для достижения поставленной цели в части автоматического уклонения стрелы от столкновения с движущимся в ее направлении препятствием, прием акустических сигналов осуществляют с различных направлений и, соответственно, определяют расстояние до окружающих грузоподъемный кран предметов с различных направлений, выявляют минимальное расстояние до препятствия, а формирование сигналов аварийной сигнализации или блокировки движений крана осуществляют исходя из выявленного минимального расстояния. Кроме того, дополнительно выявляют движение стрелы грузоподъемного крана и скорость уменьшения выявленного минимального расстояния (скорость приближения препятствия) и в случае приближения препятствия при неподвижной стреле грузоподъемного крана осуществляют принудительное включение приводов механизмов крана, приводящих к перемещению стрелы крана в сторону, противоположную перемещению стрелы крана в сторону, противоположную приближающемуся препятствию.
В предложенном способе для достижения поставленной цели возможно также дополнительное формирование сигналов индикации, информирующих оператора грузоподъемного крана о расстоянии и направлении, в котором находится ближайшее к грузоподъемному крану препятствие.
В третьем варианте предложенного способа защиты грузоподъемного крана от недопустимых перемещений стрелы путем размещения на стреле чувствительного элемента, выявления электрического напряжения на чувствительном элементе, усиления, фильтрации и последующего преобразования этого напряжения в сигналы аварийной сигнализации или блокировки движений крана в случае превышения этим напряжением установленного порогового уровня, поставленная цель достигается тем, что дополнительно выявляют движение стрелы грузоподъемного крана и, в зависимости от параметров этого движения, устанавливают коэффициент усиления выходного напряжения чувствительного элемента или указанный пороговый уровень.
Для обеспечения эффективной защиты грузоподъемного крана независимо от направления движения стрелы выявляют направление этого движения и, в зависимости от этого направления, изменяют коэффициент усиления выходного напряжения чувствительного элемента или указанный пороговый уровень. Указанное выявление движения стрелы может заключаться в выявлении не ее направления, а скорости, после чего пропорционально этой скорости может осуществляться увеличение коэффициента усиления выходного напряжения чувствительного элемента или снижение установленного порогового уровня. При этом достижение поставленной цели в части обеспечения защиты грузоподъемного крана (крана-трубоукладчика) от опасного приближения стрелы к ЛЭП в транспортном режиме обеспечивается тем, что при выявлении скорости движения стрелы дополнительно учитывают скорость поступательного перемещения грузоподъемного крана.
В устройстве защиты грузоподъемного крана от недопустимых перемещений стрелы, содержащем размещенный на стреле чувствительный элемент и электронный блок, вход которого подключен к чувствительному элементу, а выход соединен с входом устройства аварийной сигнализации или блокировки движений крана, поставленная цель достигается за счет того, что оно дополнительно содержит электромеханический преобразователь, подключенный к электронному блоку, причем чувствительный элемент прикреплен к электромеханическому преобразователю, а электронный блок выполнен с возможностью генерации сигнала возбуждения электромеханического преобразователя. Для приема или излучения акустических сигналов устройство может содержать дополнительные акустические преобразователи, подключенные к дополнительным выводам электронного блока.
Реализация предложенных отличительных признаков заявленного технического решения позволяет обеспечить защиту грузоподъемного крана от опасного приближения к ЛЭП не только переменного, но и постоянного тока. Ранее задача защиты от ЛЭП постоянного тока на грузоподъемных кранах не решалась. Заявителю также неизвестны устройства из других областей техники, в которых была бы решена задача одновременной защиты от ЛЭП как переменного, так и постоянного тока.
Заявителю также неизвестны технические решения, в которых была бы реализована координатная защита без ручной выставки ограничений движений стрелы крана.
Реализация предложенных отличительных признаков позволяет также обеспечить защиту от столкновения стрелы крана с движущимися препятствиями, например со стрелой другого крана без применения внешних (по отношению к крану) устройств, что также неизвестно из существующего уровня техники. Ранее неизвестна также реализация автоматического уклонения стрелы крана с движущимися препятствиями.
Кроме того, реализация предложенных признаков приводит к обеспечению эффективной защиты грузоподъемного крана от опасного приближения к ЛЭП независимо от направления и скорости перемещения его стрелы, в том числе в транспортном режиме. Задача защиты от опасного приближения к ЛЭП в транспортном режиме ранее не ставилась и не решалась, а обеспечение независимости параметров защиты от направления перемещения стрелы ранее решалось только путем выбора оптимальной геометрической формы чувствительного элемента (антенны), но не путем изменения чувствительности устройства в зависимости от направления и скорости перемещения стрелы.
С учетом этого в заявленном техническом решении достигается новый технический результат, являющийся следствием реализации отличительных признаков предложенного способа (его вариантов) и реализующего его устройства.
На чертеже в качестве примера реализации предложенного способа защиты (его вариантов) приведена функциональная схема устройства.
Устройство содержит чувствительный элемент 1, расположенный на стреле грузоподъемного крана (например, на оголовке стрелы) и соединенный с входом блока усиления и фильтрации 2, выход которого подключен к входу блока преобразования 3, выход которого является выходом устройства и подключен к устройству аварийной сигнализации или блокировки движений крана (на чертеже условно не показано). Для осуществления колебательных перемещений размещенного на стреле чувствительного элемента 1 устройство содержит генератор 4, подключенный к электромеханическому преобразователю (пьезокерамическому акустическому преобразователю или актюатору продольного типа) 5. Между выходом генератора 4 и электромеханическим преобразователем 5 (чувствительным элементом 1) может быть включен модулятор 6, модуляционный вход которого соединен с выходом генератора модулирующего сигнала 7. При реализации частотной модуляции выход генератора модулирующего сигнала 7 соединяется с модуляционным входом генератора 4 (на чертеже условно не показано).
Электромеханический преобразователь 5 в силу своей обратимости может работать в режиме приема акустических сигналов, т.е. как чувствительный элемент. Для обеспечения такой возможности его выход подключен к входу приемника 8, выход которого соединен со вторым входом блока преобразования 3. Если при приеме дополнительно осуществляется определение сдвига частоты принимаемых электромеханическим преобразователем 5 сигналов (в частности, доплеровского сдвига частоты), то выход генератора 4 соединяется с дополнительным входом приемника 8. Для определения расстояния до окружающих грузоподъемный кран предметов по времени приема отраженных сигналов устройство может дополнительно содержать блок дальномера 9, входы которого соединяются с выходами приемника 8 и генератора модулирующих сигналов 7. Выход дальномера при этом соединяется с третьим входом блока преобразования 3.
Прием отраженных сигналов может осуществляться не электромеханическим преобразователем 5, а с помощью дополнительных акустических преобразователей 10. Их выходы подключаются к входам приемника 8 или блока преобразования 3. В этом случае соединение электромеханического преобразователя 5 с входом приемника 8 отсутствует. Все или часть установленных в устройстве дополнительных акустических преобразователей 10 могут также использоваться в режиме излучения ультразвука. С этой целью они соединяются с выходом генератора 4 (на чертеже условно не показано).
Функциональные блоки и узлы 2, 3, 4, 6-9 устройства могут быть выполнены в виде единого электронного блока 11.
Чувствительный элемент 1 с целью удобства его крепления на несущем основании (кронштейне, элементе стрелы крана и т.п.) 12 может быть выполнен в виде болта, на резьбовую часть которого навинчивается гайка 13. Для электрической изоляции чувствительного элемента 1 от электромеханического преобразователя 5 и несущего основания 12 устанавливаются изоляционная шайба 14 и изоляционная втулка 15.
Электромеханический преобразователь 5 может быть выполнен в виде кольца из пьезокерамического материала, например марки ЦТС-19, имеющего электризацию по толщине. На поверхность кольца обычно напыляются электроды для его подключения к электрической схеме при помощи тонких металлических колец-электродов 16, подкладываемых под электромеханический преобразователь 5 и гайку 13. В показанном на чертеже варианте конструкции в качестве второго вывода чувствительного элемента 1 и электромеханического преобразователя 5 может использоваться несущее основание 12 (масса крана).
Конструктивное исполнение отдельных функциональных узлов устройства 2, 3, 4, 6-9 широко известно из источников информации [1-5], использованных при составлении заявки, и из многочисленной литературы по ультразвуковым уровнемерам и дальномерам. Блок усиления и фильтрации 2, например, выполняется в виде последовательно соединенного усилителя и полосового фильтра. При необходимости изменения его коэффициента усиления усилитель выполняется с регулируемым коэффициентом усиления, причем вход регулировки соединяется, например, с дополнительным выходом блока преобразования 3, к которому при необходимости подключаются дополнительные датчики (датчик азимута, датчик угла наклона стрелы, датчик длины стрелы и т.д.).
Блок преобразования 3 может быть выполнен на основе микроконтроллера со встроенным аналого-цифровым преобразователем, например типа AT90S8535. Функции, выполняемые этим блоком, реализуются программно. Основная функция этого блока - сравнение величин входных сигналов с пороговыми значениями, хранящимися в памяти микроконтроллера и изменяемыми при необходимости программным путем или при помощи органов управления (кнопок, тумблеров и т.д.), входящих в состав блока преобразования 3 и подключенных к входам его микроконтроллера. Блок управления 3 может содержать элементы индикации, например светодиодные индикаторы или жидкокристаллический дисплей, выполненные с возможностью отображения на них величины расстояния до препятствия, а также отображения направления, в котором находится препятствие, наиболее близкое к стреле грузоподъемного крана.
Модулятор 6 может быть выполнен, в частности, в виде электронного коммутатора. Генератор модулирующих сигналов 7 может иметь выходной сигнал прямоугольной (при использовании амплитудной манипуляции), синусоидальной или пилообразной формы. В двух последних случаях используется частотная модуляция, для чего генератор 4 выполняется в виде перестраиваемого по частоте генератора, управляемого напряжением (ГУН).
Приемник 8 может быть простроен на основе преобразователя частоты, т.е. устройства, выделяющего разность частот входных сигналов, и фильтра нижних частот. Реализация этой функции возможна программным путем. В этом случае приемник 8 реализуется на основе микроконтроллера, например типа AT90S4433. Алгоритмы цифрового преобразования частоты (определения разности частот) и фильтрации сигналов широко известны.
Дополнительные приемные акустические преобразователи 10 (при их наличии в устройстве) могут подключаться к входам аналого-цифрового преобразователя, входящего в состав микроконтроллера приемника 8. Возможно также подключение этих сигналов к аналогичным аналоговым входам блока преобразования 3. При необходимости выходные сигналы дополнительных приемных акустических преобразователей 10 могут усиливаться в тех блоках, к которым они подключены.
Приемные акустические преобразователи 10 ориентируются в различных направлениях - в тех направлениях, в которых осуществляется излучение ультразвукового сигнала и со стороны которых возможно появление препятствий. Например, возможна установка четырех преобразователей, ориентированных влево, вправо, вверх и вперед (вдоль стрелы крана).
Блок дальномера 9 представляет собой преобразователь временных интервалов в постоянное напряжение и также может быть выполнен на основе микроконтроллера.
При работе чувствительного элемента 1 совместно с элементами 5, 12-16 в режиме приема ультразвуковых колебаний металлическая накладка (антенна) 1 передает ультразвуковые колебания на электромеханический преобразователь 5, который воспринимает эти колебания и работает как чувствительный ультразвуковой элемент. Поэтому в формуле и описании предложенного технического решения под чувствительным элементом 1, в зависимости от режима работы устройства, подразумевается либо металлическая накладка (антенна) 1, либо весь узел чувствительного элемента в сборе, включающий в себя элементы 1, 5, 12-16.
Для реализации автоматического уклонения стрелы крана от столкновения с движущимися препятствиями блок преобразования 3 дополнительно соединен с электрогидравлическими приводами механизмов крана - с приводами поворота стрелы (крановой установки), подъема/опускания и телескопирования стрелы (на чертеже условно не показаны).
Рассмотрим суть предложенного способа на примере работы реализующего его устройства.
Чувствительный элемент 1, выполненный из металла (например, из дюралюминия) и расположенный на оголовке стрелы грузоподъемного крана, представляет собой электрическую антенну.
Предположим, что на некотором расстоянии L от стрелы грузоподъемного крана (от чувствительного элемента 1) расположена линия электропередачи (ЛЭП) 17, т.е. провод, находящийся по отношению к крану под некоторым напряжением U (см. чертеж).
Между проводом ЛЭП и металлической поверхностью чувствительного элемента 1 существует некоторая распределенная емкость С. Известно, что ее величину можно определить по зависимости

где К - постоянный коэффициент, зависящий от площади и геометрической конфигурации чувствительного элемента 1 и ЛЭП 17, а также от диэлектрической проницаемости окружающей среды (воздуха).
Электромеханический преобразователь 5 совместно с чувствительным элементом 1 образуют колебательную систему, имеющую собственную частоту резонанса f. Генератор 4, входящий в состав электронного блока 11, работает на частоте f и непосредственно или через модулятор 6 подает на электромеханический преобразователь 5 переменное напряжение - сигнал возбуждения. Это приводит к возникновению механических колебаний чувствительного элемента 1 на частоте f и, соответственно, к изменению расстояния до провода ЛЭП 17 на некоторую малую величину ΔL.
Соответственно изменяется и величина емкости, определяемая по формуле (1), т.е.

Известно, что энергия, накопленная в конденсаторе, пропорциональна величине этой емкости С и квадрату напряжения на ней, т.е. определяется по формуле

где U - напряжение на конденсаторе, т.е. напряжение ЛЭП 17.
Из закона сохранения энергии и формулы (3) следует, что изменение расстояния до ЛЭП на величину ΔL и соответствующее ему изменение емкости ΔС приводит к изменению напряжения на конденсаторе ΔU, т.е.

Из формулы (4), с учетом зависимостей (1) и (2) следует, что:


Данные формулы определяют суть предложенного технического решения в части обеспечения защиты от приближения к ЛЭП постоянного тока.
В формуле (5) величина изменения емкости ΔС зависит от геометрических параметров, диэлектрической проницаемости среды и амплитуды колебаний и не зависит от напряжения в линии электропередач U. Следовательно, величина изменения напряжения ΔU прямо пропорциональна напряжению ЛЭП.
Иными словами, путем измерения величины ΔU возможно измерение напряжения U в ЛЭП.
А из формулы (6) следует, что при известной амплитуде колебаний чувствительного элемента ΔL, при известной величине напряжения в ЛЭП U можно определить максимально допустимую величину ΔU, соответствующую безопасному расстоянию L до линии электропередач.
Оператор при работе на грузоподъемном кране в ручном режиме, например при помощи органов управления, расположенных на блоке преобразования 3, задает тип ЛЭП (220 В, 6 кВ, 10 кВ и т.д.), вблизи которой осуществляется работа грузоподъемного крана, т.е. задает величину напряжения U. Блок преобразования 3, используя заложенную в его памяти таблицу или зависимость безопасного расстояния L от напряжения U ЛЭП, по формуле (6) определяет пороговое значение, т.е. максимально допустимую величину напряжения ΔUmax.
Далее блок преобразования 3 в процессе работы крана осуществляет сравнение текущего значения напряжения ΔU с предельно-допустимой величиной ΔUmax и в случае превышения формирует сигнал аварийной сигнализации, предупреждающий оператора крана о недопустимом приближении к ЛЭП, или сигнал блокировки движений (остановки) крана. Благодаря этому и осуществляется защита грузоподъемного крана от опасного приближения (от недопустимых перемещений) его стрелы к ЛЭП.
Очевидно, что напряжение ΔU изменяется с частотой механических колебаний f чувствительного элемента 1. Это переменное напряжение, усиленное и отфильтрованное блоком 2, имеет амплитуду, пропорциональную текущему значению напряжения U. Причем если вблизи крана находится ЛЭП постоянного тока, то величина этой амплитуды также является постоянной величиной, а если ЛЭП переменного тока, то эта амплитуда изменяется по синусоидальному закону. Поэтому после измерения блоком преобразования 3 этой амплитуды, сравнения ее с предельно-допустимой величиной ΔUmax и последующего формирования сигналов аварийной сигнализации или блокировки движений крана осуществляется защита от опасного приближения стрелы крана к ЛЭП как постоянного, так и переменного тока. Благодаря этому и обеспечивается достижение поставленной цели в части защиты от приближения к ЛЭП постоянного тока.
Одновременно чувствительный элемент 1, колеблющийся под воздействием электромеханического преобразователя 5, создает акустическое ультразвуковое излучение (ультразвук). Форма чувствительного элемента 1 выбирается таким образом, чтобы это ультразвуковое излучение распространялось максимально равномерно во все стороны, т.е. чтобы чувствительный элемент 1, работающий в качестве излучателя ультразвука, имел максимально равномерную диаграмму направленности.
Ультразвуковое излучение может создаваться также отдельным передающим акустическим преобразователем 10, подключенным к выходу генератора 4 (на чертеже условно не показано).
Ультразвук достигает поверхности любого препятствия, находящегося вблизи стрелы грузоподъемного крана, отражается от этого препятствия и, распространяясь в обратном направлении, вновь достигает поверхности чувствительного элемента 1. В силу обратимости электромеханического преобразователя 5 воздействие отраженного ультразвукового сигнала приводит к появлению на выходе электромеханического преобразователя 5 электрического напряжения, т.е. электромеханический преобразователь 5 работает в качестве приемника отраженного ультразвукового сигнала.
Очевидно, что амплитуда этого сигнала возрастает при уменьшении расстояния до препятствия. Поэтому в предложенном устройстве путем контроля амплитуды выходного сигнала электромеханического преобразователя 5, работающего в режиме приема ультразвука, приемник 8 осуществляет измерение расстояния до препятствия. Далее блок преобразования 3 сравнивает измеренное расстояние с минимально допустимым, предварительно записанным в память микроконтроллера этого блока и в случае опасного приближения стрелы крана к препятствию формирует сигнал аварийной сигнализации или блокирует движения крана без предварительного ввода оператором параметров ограничения движений стрелы крана.
Прием отраженных сигналов может осуществляться также с помощью отдельных акустических преобразователей 10.
Таким образом, реализация отличительного признака заявленного технического решения - осуществление колебательных перемещений размещенного на стреле чувствительного элемента, приводит к достижению поставленной цели не только в части обеспечения защиты от приближения к ЛЭП постоянного тока, но и благодаря использованию создаваемых колеблющимся чувствительным элементом ультразвуковых колебаний позволяет получить новый технический результат - обеспечить автоматическую (без участия оператора) координатную защиту крана.
Очевидно, что отражение ультразвука происходит как от неподвижных, так и от движущихся предметов. Поэтому в предложенном техническом решении ввиду отсутствия жесткого задания оператором предельных положений стрелы по координатной защите указанные отличительные признаки позволяют также обеспечить защиту от столкновения стрелы крана с движущимися препятствиями.
Для повышения точности определения расстояния до препятствия и, соответственно, эффективности защиты в устройстве может осуществляться модуляция излучаемого чувствительным элементом 1 (или акустическими преобразователями 10) ультразвукового сигнала. В этом случае блок дальномера 9 определяет величину временного запаздывания принимаемого приемником 8 сигнала относительно изменения выходного сигнала генератора модулирующих сигналов 7. Далее с учетом известной величины скорости распространения ультразвука в воздухе блок дальномера 8 или блок преобразования 3 преобразует указанный временной интервал в величину расстояния до препятствия. Далее обработка этого сигнала и формирование сигналов защиты крана осуществляются блоком преобразования 3 аналогичным образом.
Приемник 8 может дополнительно измерять сдвиг частоты отраженного от препятствия и принимаемого ультразвукового сигнала относительно частоты сигнала возбуждения (частоты выходного сигнала генератора 4). Это осуществляется, во-первых, для определения скорости движущегося препятствия (по доплеровскому сдвигу частоты) и автоматической защиты крана в случае превышения этой скорости установленного максимально-допустимого значения и, во-вторых, для точного определения расстояния до препятствия в случае применения частотной модуляции выходного сигнала генератора 4. Во втором случае принцип измерения расстояния базируется на том, что отраженный от препятствия принимаемый сигнал поступает на приемник 8 с задержкой, равной двойному времени распространения ультразвука до препятствия и обратно. И если в это время частота выходного сигнала генератора 4 изменяется, то между частотой принимаемого сигнала и частотой выходного сигнала генератора 4 возникает разность частот, пропорциональная расстоянию до препятствия и скорости изменения частоты.
Для повышения точности измерения расстояния до препятствий и выравнивания чувствительности по различным направлениям прием отраженных от препятствий ультразвуковых сигналов может осуществляться не электромеханическим преобразователем 5, а с помощью дополнительных приемных акустических преобразователей 10, выходные сигналы которых, в частности, могут суммироваться или обрабатываться отдельно (для определения расстояния до препятствий в различных направлениях). Дополнительно это упрощает электрическую развязку выходного сигнала генератора 4 и принимаемого ультразвукового сигнала. Но техническая сущность предложенного технического решения и особенности работы устройства при этом не меняются.
Стрела грузоподъемного крана в месте установки чувствительного элемента обычно имеет сложную конфигурацию. По этой причине чувствительность устройства в различных направлениях оказывается различной. Для устранения этого недостатка блок преобразования 3, используя выходные сигналы подключенных к нему датчиков положения стрелы крана (датчика угла азимута, датчика угла наклона и длины стрелы), путем дифференцирования этих сигналов определяет направление движения стрелы крана (чувствительного элемента 1). Далее блок преобразования 3, используя априорно известные и записанные в памяти его микроконтроллера значения чувствительности чувствительного элемента 1 по различным осям, изменяет коэффициент усиления выходного напряжения чувствительного элемента 1 в блоке усиления и фильтрации 2 или значение максимально допустимого порогового уровня ΔUmax. Если, например, чувствительность слева ниже, чем чувствительность справа, например в N раз, при вращении стрелы влево блок преобразования 3 увеличивает коэффициент усиления в блоке усиления и фильтрации 2 в N раз или уменьшает пороговый уровень ΔUmax в N раз.
В итоге реализация данных отличительных признаков приводит к обеспечению эффективной защиты грузоподъемного крана независимо от направления перемещения его стрелы.
Очевидно, что приближение к препятствию на высокой скорости более опасно, чем на низкой. В предложенном техническом решении блок преобразования 3, осуществляя измерение скорости движения стрелы известными способами на основании значений выходных сигналов датчика угла азимута, датчика угла наклона и датчика длины стрелы, аналогичным образом осуществляет пропорциональное увеличение коэффициента усиления в блоке усиления и фильтрации 2 или пропорционально уменьшает пороговый уровень ΔUmax. Благодаря этому также обеспечивается получение нового технического результата - обеспечивается эффективная защита грузоподъемного крана независимо от направления перемещения его стрелы.
Причем в транспортном режиме дополнительно учитывается скорость поступательного перемещения крана (например, путем суммирования скорости стрелы относительно базового шасси крана с выходным сигналом спидометра, подключенного к блоку преобразования 3). Благодаря этому обеспечивается эффективная защита грузоподъемного крана (крана-трубоукладчика) от опасного приближения стрелы к ЛЭП и к другим препятствиям не только в рабочем, но и в транспортном режиме.
В предложенном техническом решении обеспечивается также автоматическое уклонение от столкновений стрелы крана с движущимися препятствиями. Предположим, что в непосредственной близости друг от друга работают два стреловых крана, например башенных.
Если стрела первого крана приближается к стреле второго крана, то она воспринимается предложенным устройством как препятствие, и при ее приближении на минимально допустимое расстояние включается блокировка движения стрелы того крана, например первого, на котором расположено предложенное устройство. Работа устройства в этом случае осуществляется так, как это описано выше.
Однако если второй кран не оборудован системой безопасности, то остановка стрелы первого крана не гарантирует предотвращение столкновения, поскольку стрела второго крана может продолжать движение в сторону первого крана. В этом случае, в предложенном техническом решении осуществляется принудительный увод стрелы первого крана из-под удара.
Для этого прием акустических сигналов при помощи акустических преобразователей 10 осуществляется с различных направлений. Соответственно, приемник 8 (или блок преобразования 3) определяет расстояние до окружающих грузоподъемный кран предметов (в данном случае до стрелы второго крана) с различных направлений, выявляет минимальное расстояние до препятствия и, соответственно, направление, с которого это препятствие приближается. При этом по отсутствию изменений выходных сигналов датчиков угла азимута, угла наклона и длины стрелы блок преобразования выявляет отсутствие движений стрелы. Одновременно этот блок определяет скорость уменьшения выявленного минимального расстояния (скорость приближения препятствия), например, путем дифференцирования этого расстояния. Далее, если препятствие продолжает приближаться при неподвижной стреле первого крана, то блок преобразования 3 осуществляет принудительное включение приводов механизмов крана, приводящих к перемещению стрелы крана в сторону, противоположную приближающемуся препятствию.
Например, если препятствие приближается справа, то блок преобразования 3 включает привод поворота стрелы крана влево, а если препятствие приближается сверху, то блок преобразования 3 одновременно включает приводы механизмов опускания и втягивания стрелы. Конкретный алгоритм управления механизмами реализуется блоком преобразования 3 программным способом, определяется конструкцией конкретного крана и электрогидравлических исполнительных механизмов и с точки зрения предложенного способа защиты не имеет принципиального значения.
В случае, если в процессе автоматического уклонения стрелы крана от столкновения с движущимся препятствием произойдет опасное сближение с другим препятствием, расположенным с той стороны стрелы, куда она движется в процессе уклонения от столкновения с первым препятствием, то в предложенном устройстве, как уже указывалось, осуществляется контроль расстояние до препятствия с различных направлений и последующее принятие решения об отключении или включении приводов крана исходя из минимального расстояния до препятствия, с какой бы стороны оно не находилось. Поэтому в предложенном техническом решении не существует опасности того, что в процессе принудительного уклонения от столкновений стрелы грузоподъемного крана с одной стороны произойдет столкновение этой стрелы с препятствием, расположенным с другой стороны крана.
Для обеспечения удобства работы оператора блок преобразования 3 после определения направления на наиболее близкое к крану препятствие, а также расстояния до этого препятствия, работая по программе, записанной в памяти его микроконтроллера, преобразует эти параметры в цифровую форму и отображает на своих индикаторах. При этом расстояние может отображаться, например, при помощи трехразрядного цифрового индикатора (например, от 00,0 до 99, 9 метров), а направление - в виде четырех светодиодов (лево, право, перед, верх) или в виде стрелки - направления на жидкокристаллическом дисплее.
С учетом изложенного, отличительные признаки заявленного технического решения являются новыми и обеспечивают достижение нового технического результата, а именно защиту от приближения к ЛЭП постоянного тока, автоматическую (без участия оператора) координатную защиту крана, защиту от столкновения стрелы крана с движущимися препятствиями, в том числе автоматическое уклонение от столкновения с движущимися в направлении крана предметами (препятствиями), эффективную защиту грузоподъемного крана независимо от направления и скорости перемещения его стрелы, в том числе в транспортном режиме, а также предоставление оператору информации о расстоянии до ближайшего препятствия и о направлении на это препятствие.
Источники информации, использованные при составлении заявки:
1. Патент RU 2097895 C1, МПК 6 Н 02 Н 5/15, G 01 R 29/08, 27.11.1997.
2. Патент RU 2104245 C1, МПК 6 B 66 C 23/88, 10.02.1998.
3. Патент RU 2070162 C1, МПК 6 B 66 C 23/90, 10.12.1996.
4. Патент RU 2149821 C1, МПК 7 B 66 C 23/88, 27.05.2000.
5. Патент RU 2151732 C1, МПК 7 B 66 C 15/00, 27.06.2000.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОВЫШЕНИЯ БЕЗОПАСНОСТИ РАБОТЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2270162C2 |
| СПОСОБ БЕСПРОВОДНОЙ ПЕРЕДАЧИ ИНФОРМАЦИИ В СИСТЕМЕ БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2282576C2 |
| СПОСОБ УПРАВЛЕНИЯ ГРУЗОПОДЪЕМНЫМ КРАНОМ | 2005 |
|
RU2305063C2 |
| СПОСОБ ЗАДАНИЯ КРАНОВЩИКОМ РАБОЧЕЙ ЗОНЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2004 |
|
RU2280610C2 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ АВАРИЙ ПРИ РАБОТЕ ГРУЗОПОДЪЕМНОГО КРАНА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2006 |
|
RU2306255C1 |
| СИСТЕМА ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА (ВАРИАНТЫ) | 2006 |
|
RU2335451C1 |
| СИСТЕМА БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОЙ МАШИНЫ С ЭЛЕКТРОПРИВОДОМ | 2008 |
|
RU2381171C1 |
| ОГРАНИЧИТЕЛЬ НАГРУЗКИ СТРЕЛОВОГО КРАНА | 2009 |
|
RU2391285C1 |
| УСТРОЙСТВО ГОРИЗОНТИРОВАНИЯ ЛЮЛЬКИ АВТОПОДЪЕМНИКА | 2011 |
|
RU2488545C2 |
| Способ обмена информацией между модулями системы безопасности грузоподъемной машины и устройство для его осуществления | 2022 |
|
RU2778173C1 |
Группа изобретений относится к подъемно-транспортной технике и предназначена для защиты стреловых грузоподъемных кранов от повреждений при работе в стесненных условиях и при работе вблизи линии электропередачи. Сущность первого варианта предложенного способа заключается в том, что при размещении на стреле чувствительного элемента, выполненного в виде электрической антенны, выявлении электрического напряжения на чувствительном элементе, усилении, фильтрации и преобразовании этого напряжения в сигналы аварийной сигнализации или блокировки движений крана дополнительно осуществляют колебательные перемещения размещенного на стреле чувствительного элемента. При этом могут дополнительно осуществлять прием акустического сигнала, создаваемого колеблющимся чувствительным элементом и отраженного от окружающих кран предметов, выявлять амплитуду и/или доплеровский сдвиг частоты, определять по их величинам расстояние до окружающих кран предметов или скорость их приближения к крану и при уменьшении расстояния или увеличении скорости свыше допустимых значений осуществлять дополнительное формирование сигнала аварийной сигнализации или блокировки движений крана. Формирование ультразвукового сигнала может осуществляться не за счет механических колебаний антенны, а при помощи отдельного акустического преобразователя. Возможно также дополнительное формирование сигнала модуляции, воздействие этим сигналом на амплитуду или частоту колебаний чувствительного элемента и определение величины расстояния до окружающих кран предметов путем измерения времени запаздывания принимаемого сигнала относительно сигнала модуляции. Сущность другого варианта предложенного способа заключается в том, что дополнительно выявляют движение стрелы крана и размещенного на стреле чувствительного элемента и в зависимости от параметров этого движения устанавливают коэффициент усиления напряжения на чувствительном элементе или указанный пороговый уровень. При этом могут дополнительно выявлять направление этого движения и в зависимости от этого направления изменять коэффициент усиления выходного напряжения чувствительного элемента или указанный пороговый уровень. Выявление движения стрелы может заключаться в выявлении не ее направления, а скорости, после чего пропорционально от этой скорости может осуществляться увеличение коэффициента усиления выходного напряжения чувствительного элемента или снижение установленного порогового уровня. При этом защита крана от опасного приближения стрелы к ЛЭП в транспортном режиме обеспечивается благодаря тому, что при выявлении скорости движения стрелы дополнительно учитывают скорость поступательного перемещения крана. Дополнительно в предложенном техническом решении выявляют направление, на котором находится препятствие и в случае приближения этого препятствия к крану при неподвижной стреле осуществляют принудительное включение привода стрелы крана в противоположном направлении, осуществляя автоматическое уклонение от столкновения стрелы с данным препятствием. Устройство для реализации предложенного способа содержит размещенный на стреле чувствительный элемент и электронный блок, вход которого подключен к чувствительному элементу, а выход соединен с входом устройства аварийной сигнализации или блокировки движений крана, а также электромеханический преобразователь, подключенный к электронному блоку. Чувствительный элемент прикреплен к электромеханическому преобразователю, а электронный блок выполнен с возможностью генерации сигнала возбуждения электромеханического преобразователя. Прием акустических сигналов может осуществляться при помощи дополнительных акустических преобразователей, подключенных к дополнительным выводам электронного блока. Группа изобретений позволяет реализовать защиту крана от опасного приближения к линии электропередачи не только переменного, но и постоянного тока. 4 н. и 11 з.п. ф-лы, 1 ил.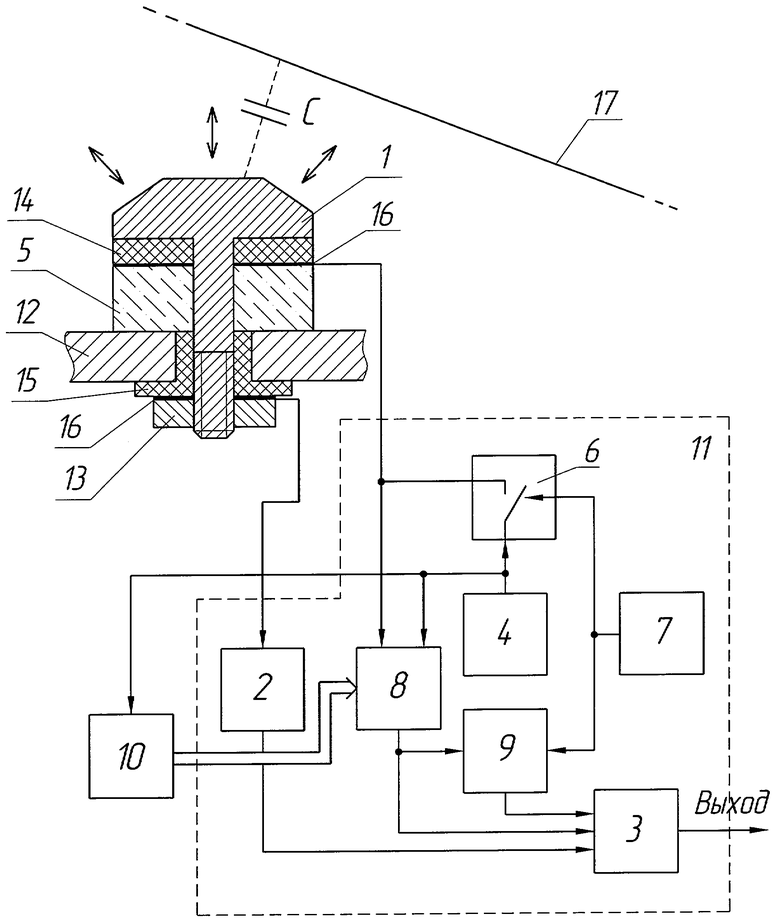
| УСТРОЙСТВО ЗАЩИТЫ СТРОИТЕЛЬНОГО КРАНА | 1993 |
|
RU2070162C1 |
| СПОСОБ ЗАЩИТЫ САМОХОДНОГО КРАНА ОТ ОПАСНОГО НАПРЯЖЕНИЯ ПРИ РАБОТЕ ВБЛИЗИ ВОЗДУШНЫХ ЛИНИЙ ЭЛЕКТРОПЕРЕДАЧ | 1999 |
|
RU2149821C1 |
| УСТРОЙСТВО БЕЗОПАСНОСТИ ГРУЗОПОДЪЕМНОГО КРАНА | 1999 |
|
RU2151732C1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ПОДЪЕМНОГО КРАНА ОТ ОПАСНОГО НАПРЯЖЕНИЯ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ | 1997 |
|
RU2104245C1 |

