Изобретение относится к области радиолокации и может быть использовано в радиолокационных системах для определения знака направления движения цели.
Наиболее близким по технической сущности к заявляемому устройству является устройство для определения знака направления движения цели (см. Бакулев П.А. Радиолокация движущихся целей. - М.: Сов. радио, 1964, стр.163), принятое за прототип. Известное устройство-прототип содержит последовательно соединенные приемно-передающую антенну, переключатель приемо-передачи, первый смеситель, усилитель промежуточной частоты и детектор, задающий генератор, первый выход которого соединен с первым входом усилителя мощности, второй вход которого соединен с выходом импульсного модулятора, а выход соединен со вторым входом переключателя приемо-передачи, второй выход задающего генератора через второй смеситель соединен со вторым входом первого смесителя, генератор промежуточной частоты, первый выход которого соединен со вторым входом второго смесителя, и индикатор.
Недостатками устройства-прототипа являются малое быстродействие и низкая точность определения знака направления движения цели, особенно если цель малоскоростная. Для определения знака направления движения цели отметка цели на экране индикатора должна переместиться на величину, сравнимую с диаметром отметки. При скоростях реальных целей интервал сравнения должен составлять несколько секунд или даже несколько десятков секунд, что снижает быстродействие устройства. Точность определения знака направления движения цели при этом также мала, так как зависит от субъективного восприятия оператора, что проявляется в виде неправильного определения знака направления движения.
Задачей настоящего изобретения является создание устройства для определения знака направления движения цели, обеспечивающего повышение быстродействия и точности определения знака направления движения цели за счет возможности определения знака направления движения цели путем проведения аппаратной оценки направления доплеровского смещения частоты сигнала цели с исключением оператора из процесса принятия решения.
Поставленная задача достигается тем, что в устройство для определения знака направления движения цели, содержащее так же, как и прототип, последовательно соединенные приемно-передающую антенну, переключатель приемо-передачи, первый смеситель, усилитель промежуточной частоты и детектор, задающий генератор, первый выход которого соединен с первым входом усилителя мощности, второй вход которого соединен с выходом импульсного модулятора, а выход соединен со вторым входом переключателя приемо-передачи, второй выход задающего генератора через второй смеситель соединен со вторым входом первого смесителя, генератор промежуточной частоты, первый выход которого соединен со вторым входом второго смесителя, и индикатор, в отличие от прототипа введены последовательно соединенные генератор модуляции промежуточной частоты и модулятор промежуточной частоты, второй вход которого подключен ко второму выходу генератора промежуточной частоты, а выход подключен ко второму входу детектора, последовательно соединенные фильтр доплеровских частот, вход которого соединен с выходом детектора, частотный демодулятор, определитель временного изменения частоты сигнала цели и коррелятор изменения частоты сигнала цели, второй вход которого подключен к выходу генератора модуляции промежуточной частоты, а выход подключен к индикатору.
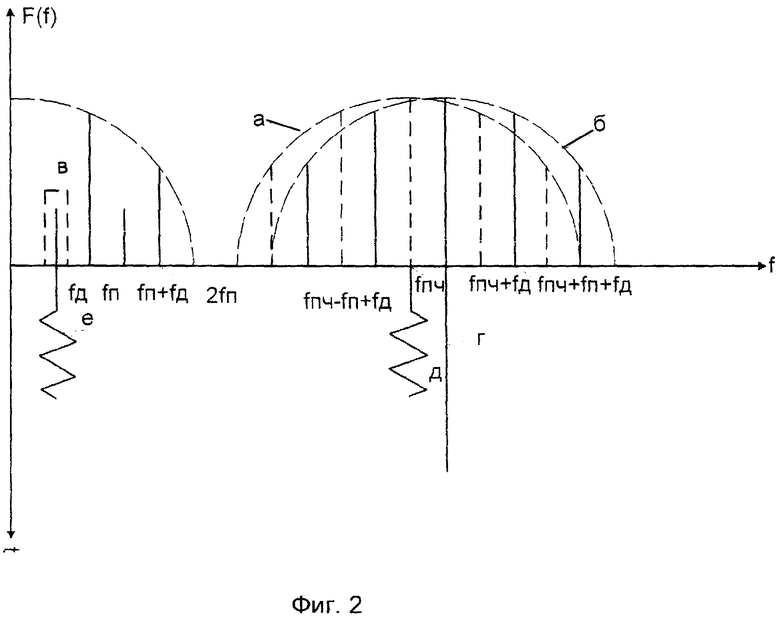
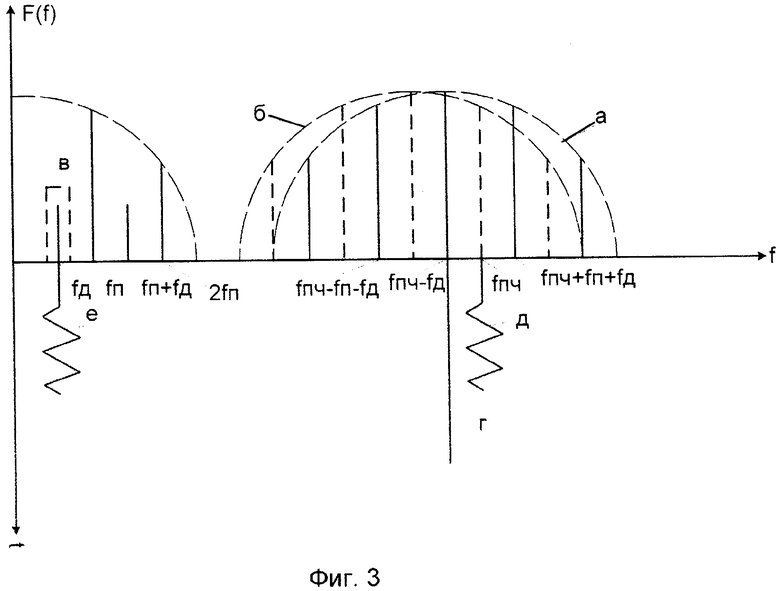
Сущность изобретения поясняется чертежами, где на фиг.1 представлена структурная схема предлагаемого устройства, на фиг.2 и фиг.3 представлены спектры сигналов, действующих в устройстве, поясняющие процесс определения знака направления движения для приближающейся цели и для удаляющейся цели соответственно.
Предлагаемое устройство для определения знака направления движения цели (фиг.1) содержит так же, как и прототип, последовательно соединенные приемно-передающую антенну 1, переключатель приемо-передачи 2, первый смеситель 3, усилитель промежуточной частоты 4 и детектор 5, задающий генератор 6, первый выход которого соединен с первым входом усилителя мощности 7, второй вход которого соединен с выходом импульсного модулятора 8, а выход соединен со вторым входом переключателя приемо-передачи 2. Второй выход задающего генератора 6 через второй смеситель 9 соединен со вторым входом первого смесителя 3, генератор промежуточной частоты 10, первый выход которого соединен со вторым входом второго смесителя 9, и индикатор 11.
В отличие от прототипа устройство содержит последовательно соединенные генератор модуляции промежуточной частоты 12 и модулятор промежуточной частоты 13, второй вход которого подключен ко второму выходу генератора промежуточной частоты 10, а выход подключен ко второму входу детектора 5, последовательно соединенные фильтр доплеровских частот 14, вход которого соединен с выходом детектора 5, частотный демодулятор 15, определитель временного изменения частоты сигнала цели 16 и коррелятор изменения частоты сигнала цели 17, второй вход которого подключен к выходу генератора модуляции промежуточной частоты 12, а выход подключен к индикатору 11.
На фиг.2 представлены спектры сигналов, действующих в устройстве, поясняющие процесс определения знака направления движения для приближающейся цели, где:
а - огибающая спектра излученного сигнала на промежуточной частоте,
б - огибающая спектра сигнала, принятого от приближающейся цели, на промежуточной частоте,
в - амплитудно-частотная характеристика фильтра доплеровских частот 14,
г - временная зависимость частоты первой гармоники сигнала равномерно приближающейся цели,
д - временная зависимость частоты опорного сигнала на втором входе детектора 5, поступающего с выхода модулятора промежуточной частоты 13,
е - временная зависимость разностной частоты первой гармоники сигнала равномерно приближающейся цели и промодулированной промежуточной частоты на выходе фильтра доплеровских частот 14.
На фиг.3 представлены спектры сигналов, действующих в устройстве, поясняющие процесс определения знака направления движения для удаляющейся цели, где:
а - огибающая спектра излученного сигнала на промежуточной частоте,
б - огибающая спектра сигнала, принятого от удаляющейся цели, на промежуточной частоте,
в - амплитудно-частотная характеристика фильтра доплеровских частот 14,
г - временная зависимость частоты первой гармоники сигнала равномерно удаляющейся цели,
д - временная зависимость частоты опорного сигнала на втором входе детектора 5, поступающего с выхода модулятора промежуточной частоты 13,
е - временная зависимость разностной частоты первой гармоники сигнала равномерно удаляющейся цели и промодулированной промежуточной частоты на выходе фильтра доплеровских частот 14.
Заявляемое устройство работает следующим образом.
Приемно-передающая антенна 1 излучает зондирующие импульсы, поступающие через переключатель приемо-передачи 2 от передатчика, построенного по многокаскадному принципу, в котором колебания задающего генератора 6 усиливаются в усилителе мощности 7, в котором одновременно происходит импульсная модуляция сигнала с частотой повторения Fп, задаваемой импульсным модулятором 8. Отраженные от цели импульсы принимаются антенной 1 и через переключатель приемо-передачи 2 поступают на первый вход первого смесителя 3. На второй вход первого смесителя 3 с выхода второго смесителя 9 поступает гетеродинный сигнал, сформированный из колебаний задающего генератора 6 и колебаний генератора промежуточной частоты 10. Преобразованные в первом смесителе 3 в колебания на промежуточной частоте fпч сигналы цели усиливаются до необходимого уровня в усилителе промежуточной частоты 4 и поступают на детектор 5. На второй вход детектора 5 с модулятора промежуточной частоты 13 поступает опорное колебание, частота которого отличается от частоты генератора промежуточной частоты 10 на величину, определяемую величиной управляющего напряжения, поступающего с выхода генератора модуляции промежуточной частоты 12, который вырабатывает периодически изменяющийся сигнал с частотой Fм, например, по пилообразному закону (или меандр, или синусоидальный). При изменении управляющего напряжения линейно-связанно изменяется и частота опорного колебания детектора 5 относительно fпч (фиг.2,д и фиг.3,д). На выходе детектора 5 образуются биения между сигналом цели и опорным колебанием детектора 5, которые с учетом импульсного характера зондирования образуют последовательность видеоимпульсов, модулированных по амплитуде доплеровской частотой fд в соответствии со скоростью движения цели.
Предлагаемое устройство осуществляет однозначное определение знака направления движения цели при скоростях цели, когда доплеровская поправка частоты |fд|≤Fп/2, что выполняется, в том числе для целей, перемещающихся с малыми радиальными скоростями. Максимальная частота Fм спектра модулирующего напряжения генератора модуляции промежуточной частоты 12 выбирается меньше минимальной доплеровской поправки частоты сигнала цели fд min, соответствующей минимально заданной радиальной скорости движения цели, но больше максимальной частоты ширины (Δfц) спектра сигнала цели, т.е. Δfц<Fм<fgmin. В связи с этим частота первой гармоники биений (фиг.2,е и фиг.3,е) изменяется во времени в незначительных пределах в соответствии с изменением модулирующего напряжения генератора модуляции промежуточной частоты 12. Первая гармоника биений фильтруется фильтром доплеровских частот 14, частотная характеристика которого (фиг.2,в и фиг.3,в) равномерна в полосе частот fд min<f≤Fп/2. При этом центральная частота сигнала цели изменяется периодически в соответствии с законом, определяемым генератором модуляции промежуточной частоты 12. Отфильтрованная первая гармоника биений поступает на частотный демодулятор 15, имеющий линейный диапазон демодуляции в полосе частот соответствующих полосе пропускания фильтра доплеровских частот 14. Выходное напряжение частотного демодулятора 15 содержит постоянную составляющую, определяемую доплеровской поправкой частоты относительно излученных колебаний, и переменную составляющую с частотой Fм, вызванную частотной модуляцией опорного напряжения детектора 5 (фиг.2,д и фиг.3,д), поступающих с модулятора промежуточной частоты 13, управляемого от генератора модуляции промежуточной частоты 12.
Для задачи, решаемой предлагаемым устройством, полезную информацию несет только переменная составляющая выходного напряжения частотного демодулятора 15 с частотой Fм, которая выделяется определителем временного изменения частоты сигнала 16. Выделенная переменная составляющая подается на сигнальный вход коррелятора изменения частоты сигнала цели 17, опорный (второй) вход которого подключен к выходу генератора модуляции промежуточной частоты 12.
В предлагаемом устройстве в модуляторе промежуточной частоты 13 с линейной характеристикой для конкретности принято, что осуществляется частотная модуляция прямо пропорционально с модулирующим напряжением генератора модуляции промежуточной частоты 12, хотя может быть выбрана и обратно пропорциональная зависимость.
Для приближающейся цели (фиг.2) характерна обратно пропорциональная зависимость между изменением опорной частоты детектора 5, поступающего с выхода модулятора промежуточной частоты 13 (фиг.2,д), и изменением частоты отфильтрованной в фильтре доплеровских частот 14 первой гармоники биений на выходе детектора 5 сигнала цели и модулированной опорной частоты детектора 5 (фиг.2,е). Коррелятор изменения частоты сигнала цели 17 определяет коэффициент корреляции между поданными на его входы напряжениями, равный минус 1, т.е. выдает, например, фиксированный отрицательный потенциал, который соответствует приближающейся цели.
Для удаляющейся цели (фиг.3) характерна прямо пропорциональная зависимость между изменением опорной частоты детектора 5 и изменением частоты отфильтрованной в фильтре доплеровских частот 14 первой гармоники биений на выходе детектора 5 сигнала цели и модулированной опорной частоты детектора 5 (фиг.3,е). Коррелятор 17 определяет коэффициент корреляции плюс 1, т.е. выдает, например, фиксированный положительный потенциал, который соответствует удаляющейся цели.
Выходное напряжение коррелятора изменения частоты сигнала цели 17 используется для формирования соответствующей метки знака направления движения цели на экране индикатора 11 или для других целей.
Так как значение коэффициента корреляции (знак) определяется аппаратно автоматически и за малое время, равное долям секунд, то обеспечивается повышение быстродействия и точности устройства для определения знака направления движения цели за счет исключения из процесса принятия решения оператора.
Предлагаемое устройство определения знака направления движения цели обладает преимуществами по сравнению с устройством-прототипом по быстродействию и точности определения знака направления движения цели, что особенно проявляется при определении знака направления движения целей, обладающих малой радиальной скоростью перемещения.
Технический результат от использования предлагаемого устройства для определения знака направления движения цели заключается в повышении быстродействия и точности определения знака направления движения цели за счет возможности определения знака направления движения цели путем проведения аппаратной оценки направления доплеровского смещения частоты сигнала цели с исключением оператора из процесса принятия решения.
Реализация устройства не вызывает практических трудностей, так как вновь вводимые блоки представляют собой завершенные функциональные узлы, выполняемые на основе известных и широко распространенных радиотехнических элементов, выпускаемых отечественной промышленностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА НАВЕДЕНИЯ УПРАВЛЯЕМЫХ РАКЕТ | 2013 |
|
RU2539842C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ЗНАКА НАПРАВЛЕНИЯ ДВИЖЕНИЯ ЦЕЛИ | 2004 |
|
RU2267799C1 |
| Радиолокационная станция | 2021 |
|
RU2755518C1 |
| СПОСОБ И СИСТЕМА ДЛЯ РАДИОЛОКАЦИОННОГО ИЗМЕРЕНИЯ СКОРОСТЕЙ И КООРДИНАТ ОБЪЕКТОВ (ВАРИАНТЫ) | 2003 |
|
RU2255352C2 |
| РАДИОДАТЧИК | 1994 |
|
RU2087922C1 |
| ПРИЕМНО-ПЕРЕДАЮЩЕЕ УСТРОЙСТВО ГОМОДИННОГО РАДИОЛОКАТОРА | 2000 |
|
RU2189055C2 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ | 1994 |
|
RU2080620C1 |
| КОГЕРЕНТНО-ИМПУЛЬСНЫЙ РАДИОЛОКАТОР | 2012 |
|
RU2503972C1 |
| ИМИТАТОР РАДИОЛОКАЦИОННОЙ ЦЕЛИ | 2018 |
|
RU2676469C1 |
| ИЗМЕРИТЕЛЬ СКОРОСТИ | 2011 |
|
RU2492505C1 |
Изобретение относится к радиолокационной технике, в частности, к радиолокационным системам для определения знака направления движения цели. Сущность изобретения заключается в том, что устройство для определения знака направления движения цели, содержащее приемно-передающую антенну, переключатель приемо-передачи, первый смеситель, усилитель промежуточной частоты, детектор, задающий генератор, усилитель мощности, импульсный модулятор, второй смеситель, генератор промежуточной частоты и индикатор, дополнительно содержит последовательно соединенные генератор модуляции промежуточной частоты и модулятор промежуточной частоты, второй вход которого подключен ко второму выходу генератора промежуточной частоты, а выход подключен ко второму входу детектора, последовательно соединенные фильтр доплеровских частот, вход которого соединен с выходом детектора, частотный демодулятор, определитель временного изменения частоты сигнала цели и коррелятор изменения частоты сигнала цели, второй вход которого подключен к выходу генератора модуляции промежуточной частоты, а выход подключен к индикатору. Реализация изобретения позволяет обеспечить повышение быстродействия и точности определения знака направления движения цели. 3 ил.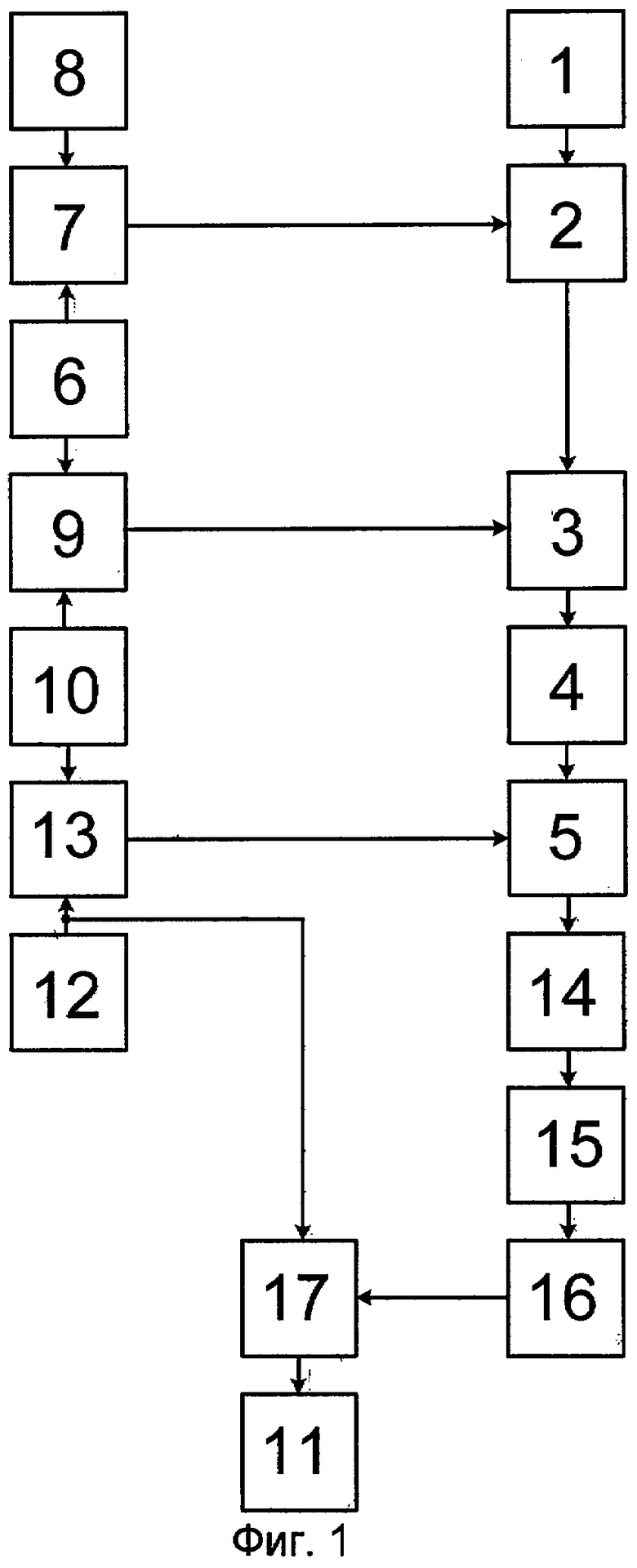
Устройство для определения знака направления движения цели, содержащее последовательно соединенные приемно-передающую антенну, переключатель приема-передачи, первый смеситель, усилитель промежуточной частоты и детектор, задающий генератор, первый выход которого соединен с первым входом усилителя мощности, второй вход которого соединен с выходом импульсного модулятора, а выход соединен со вторым входом переключателя приема-передачи, второй выход задающего генератора через второй смеситель соединен с вторым входом первого смесителя, генератор промежуточной частоты, первый выход которого соединен со вторым входом второго смесителя, и индикатор, отличающееся тем, что в него введены последовательно соединенные генератор модуляции промежуточной частоты и модулятор промежуточной частоты, второй вход которого подключен ко второму выходу генератора промежуточной частоты, а выход подключен ко второму входу детектора, последовательно соединенные фильтр доплеровских частот, вход которого соединен с выходом детектора, частотный демодулятор, определитель временного изменения частоты сигнала цели и коррелятор изменения частоты сигнала цели, второй вход которого подключен к выходу генератора модуляции промежуточной частоты, а выход подключен к индикатору.
| БАКУЛЕВ П.А | |||
| Радиолокация движущихся целей | |||
| - М.: Сов | |||
| радио, 1964, с.163 | |||
| СПОСОБ ИЗМЕРЕНИЯ СКОРОСТИ ДВИЖЕНИЯ ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1994 |
|
RU2100810C1 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА | 1998 |
|
RU2133480C1 |
| US 5432515 А, 11.07.1995 | |||
| Многокамерный гидравлический классификатор | 1981 |
|
SU963562A1 |

