Изобретение относится к области радиолокации, в частности к радиолокационным системам для определения знака направления движения цели.
Известно устройство для определения знака направления движения цели, которое является наиболее близким по технической сущности к заявляемому устройству (см. Итоги науки и техники. Радиотехника, том 3, Радиолокация и радионавигация», ред. Р.Г.Мираманов, - М.: ВИНИТИ, 1972, стр.128, рис.24), принятое за прототип. Известное устройство-прототип содержит последовательно соединенные антенну, переключатель приемопередачи, первый смеситель, усилитель промежуточной частоты, строб-каскад, первый когерентный детектор, первый фильтр доплеровских частот, первый фазовращатель и фазовый детектор, последовательно соединенные задающий генератор и усилитель мощности, выход которого подключен к передающему входу переключателя приемопередачи, а модулирующий вход усилителя мощности подключен к выходу импульсного модулятора, генератор промежуточной частоты, выход которого подключен к опорному входу первого когерентного детектора, второй смеситель, первый вход которого подключен ко второму выходу задающего генератора, второй вход - к выходу генератора промежуточной частоты, а выход - к опорному входу первого смесителя, последовательно соединенные второй фазовращатель, вход которого соединен с выходом генератора промежуточной частоты, второй когерентный детектор, сигнальный вход которого подключен к выходу строб-каскада, и второй фильтр доплеровских частот, выход которого подключен ко второму входу фазового детектора, и индикатор.
Известное устройство-прототип, основанное на определении знака доплеровского смещения частоты сигнала цели позволяет определять знак направления движения цели только в узком диапазоне скоростей, когда доплеровское смещение частоты сигнала цели не превышает половины частоты повторения зондирующих импульсов. Особую трудность при этом представляет определение знака направления движения высокоскоростной цели при импульсном зондировании пространства.
Задачей настоящего изобретения является создание устройства для определения знака направления движения цели, обеспечивающего расширение диапазона скоростей целей однозначного определения знака направления движения цели, особенно высокоскоростной и высокоманевренной.
Поставленная задача достигается тем, что в устройство для определения знака направления движения цели, содержащее так же, как и прототип, последовательно соединенные антенну, переключатель приемопередачи, первый смеситель, усилитель промежуточной частоты, строб-каскад, первый когерентный детектор, первый фильтр доплеровских частот, первый фазовращатель и фазовый детектор, последовательно соединенные задающий генератор и усилитель мощности, выход которого подключен к передающему входу переключателя приемопередачи, а модулирующий вход подключен к выходу импульсного модулятора, генератор промежуточной частоты, выход которого подключен к опорному входу первого когерентного детектора, второй смеситель, первый вход которого подключен ко второму выходу задающего генератора, второй вход - к выходу генератора промежуточной частоты, а выход - к опорному входу первого смесителя, последовательно соединенные второй фазовращатель, вход которого соединен с выходом генератора промежуточной частоты, второй когерентный детектор, сигнальный вход которого подключен к выходу строб-каскада, и второй фильтр доплеровских частот, выход которого подключен ко второму входу фазового детектора, и индикатор, в отличие от прототипа, введены последовательно соединенные блок выделения постоянной составляющей, вход которого подключен к выходу фазового детектора, и блок сравнения полярностей, выход которого подключен к входу индикатора, последовательно соединенные блок вычитания постоянной составляющей, первый вход которого подключен к выходу фазового детектора, а второй вход подключен к выходу блока выделения постоянной составляющей, блок выделения модуляции периода повторения зондирующих импульсов и блок сравнения модуляционных параметров, выход которого подключен ко второму входу блока сравнения полярностей, последовательно соединенные блок измерения искажений модуляционных параметров, вход которого подключен к выходу блока выделения модуляции периода повторения зондирующих импульсов, генератор модуляции периода повторения зондирующих импульсов и блок компенсации временной задержки, выход которого подключен ко второму входу блока сравнения модуляционных параметров, блок частотной коррекции, вход которого подключен к выходу второго фильтра доплеровских частот, а выход подключен к управляющему входу блока компенсации временной задержки, причем выход генератора модуляции периода повторения зондирующих импульсов подключен также к управляющему входу импульсного модулятора.
На фиг.1 представлена структурная схема предлагаемого устройства, где
1 - антенна,
2 - переключатель приемопередачи,
3 - первый смеситель,
4 - усилитель промежуточной частоты (УПЧ),
5 - строб-каскад,
6 - первый когерентный детектор,
7 - первый фильтр доплеровских частот,
8 - первый фазовращатель,
9 - фазовый детектор,
10 - задающий генератор,
11 - усилитель мощности,
12 - импульсный модулятор,
13 - генератор промежуточной частоты,
14 - второй смеситель,
15 - второй фазовращатель,
16 - второй когерентный детектор,
17 - второй фильтр доплеровских частот,
18-индикатор,
19 - блок выделения постоянной составляющей,
20 - блок сравнения полярностей,
21 - блок вычитания постоянной составляющей,
22 - блок выделения модуляции периода повторения зондирующих импульсов,
23 - блок сравнения модуляционных параметров,
24 - блок измерения искажений модуляционных параметров,
25 - генератор модуляции периода повторения зондирующих импульсов,
26 - блок компенсации временной задержки,
27 - блок частотной коррекции.
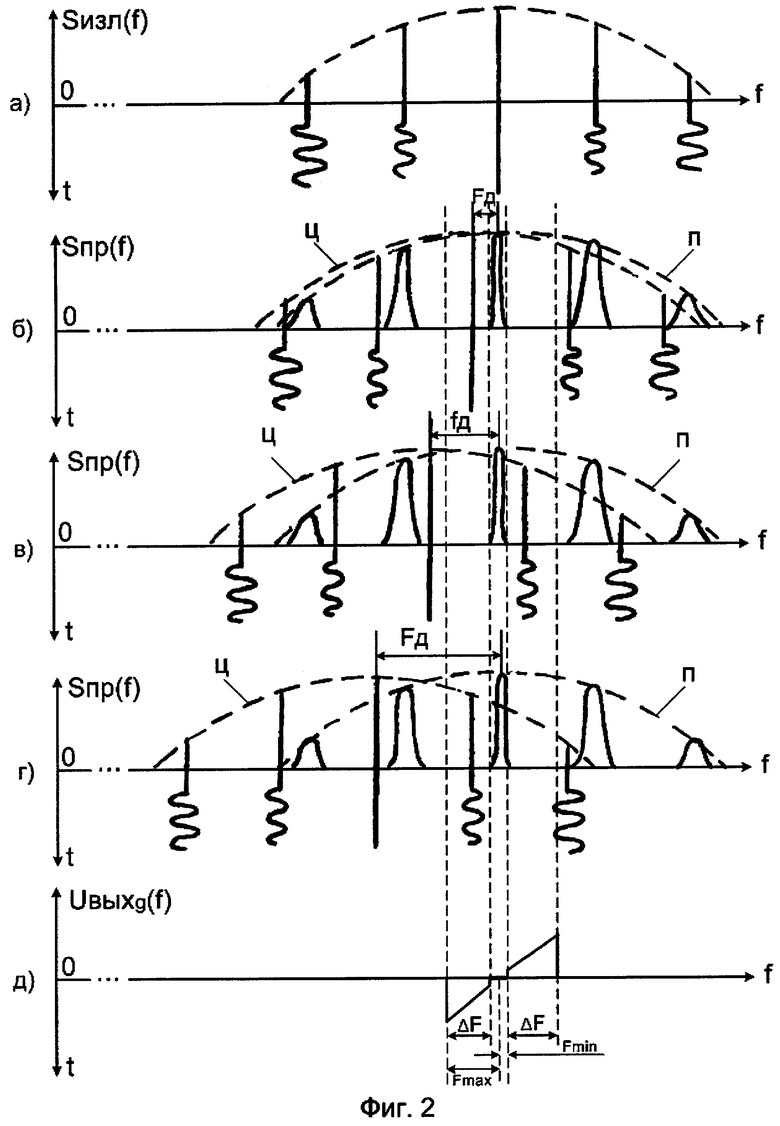
На фиг.2 представлены спектры сигналов, действующих в устройстве, поясняющие процесс определения знака направления движения для удаляющейся цели, где
а - спектр излученного сигнала, представленный на промежуточной частоте,
б - спектр сигнала, принятого от цели, на выходе УПЧ 4 при |FД|<0,5FП,
в - спектр сигнала, принятого от цели, на выходе УПЧ 4 при 0,5FП≤|FД|≤FП,
г - спектр сигнала, принятого от цели, на выходе УПЧ 4 при |FД|>FП,
д - амплитудно-частотная характеристика фазового детектора 9.
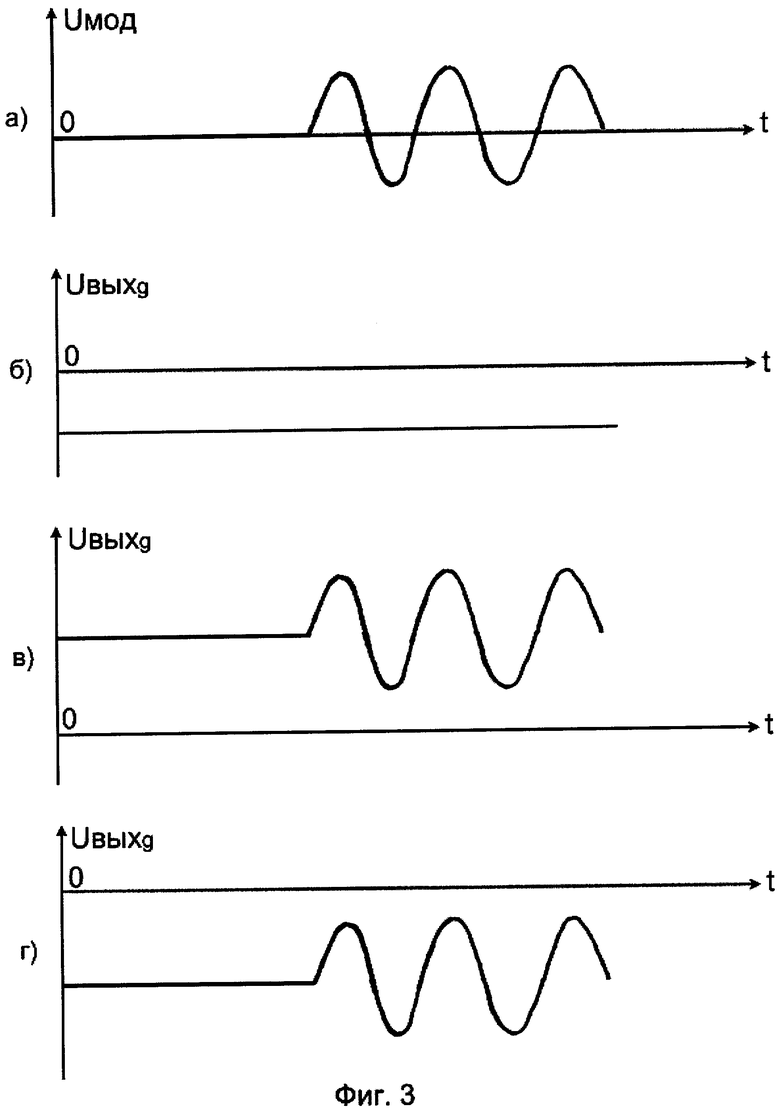
На фиг.3 представлены временные зависимости сигналов, действующих в устройстве, поясняющие процесс определения знака направления движения для удаляющейся цели, где
а - сигнал на выходе блока 25,
б - сигнал на выходе фазового детектора 9 при |FД|<0,5FП,
в - сигнал на выходе фазового детектора 9 при 0,5FП≤|FД|≤FП,
г - сигнал на выходе фазового детектора 9 при |FД|>FП.
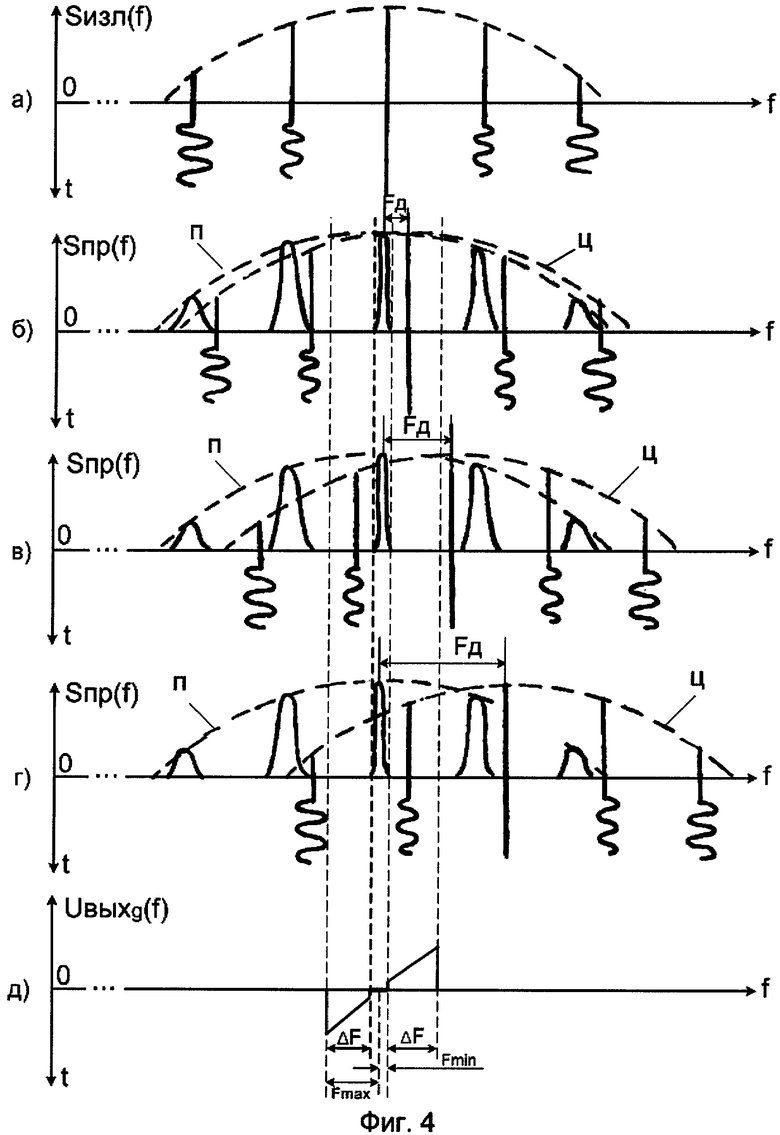
На фиг.4 представлены спектры сигналов, действующих в устройстве, поясняющие процесс определения знака направления движения для приближающейся цели, где
а - спектр излученного сигнала, представленный на промежуточной частоте,
б - спектр сигнала, принятого от цели, на выходе УПЧ 4 при |FД|<0,5FП,
в - спектр сигнала, принятого от цели, на выходе УПЧ 4 при 0,5FП≤|FД|≤FП,
г - спектр сигнала, принятого от цели, на выходе УПЧ 4 при |FД|>FП,
д - амплитудно-частотная характеристика фазового детектора 9.
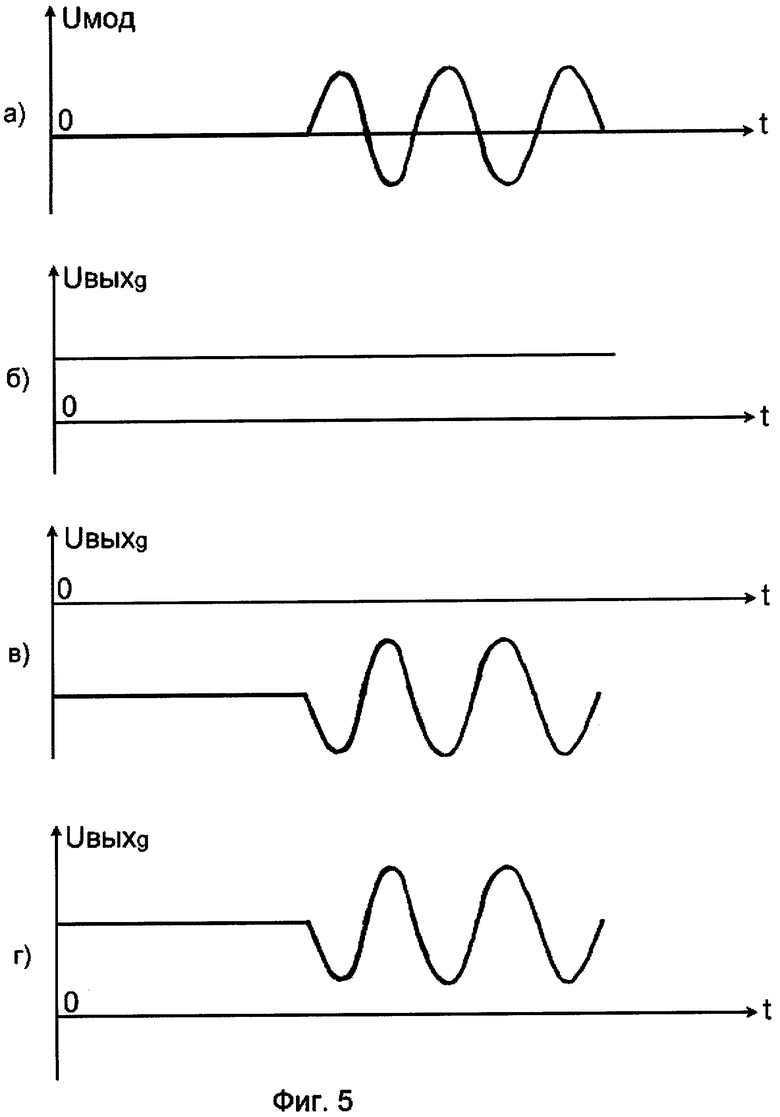
На фиг.5 представлены временные зависимости сигналов, действующих в устройстве, поясняющие процесс определения знака направления движения для приближающейся цели, где
а - сигнал на выходе блока 25,
б - сигнал на выходе фазового детектора 9 при |FД|<0,5FП,
в - сигнал на выходе фазового детектора 9 при 0,5FП≤|FД|≤FП,
г - сигнал на выходе фазового детектора 9 при |FД|>FП.
Предлагаемое устройство для определения знака направления движения цели (фиг.1) содержит так же, как и прототип, последовательно соединенные антенну 1, переключатель приемопередачи 2, первый смеситель 3, усилитель промежуточной частоты (УПЧ) 4, строб-каскад 5, первый когерентный детектор 6, первый фильтр доплеровских частот 7, первый фазовращатель 8 и фазовый детектор 9, последовательно соединенные задающий генератор 10 и усилитель мощности 11, выход которого подключен к передающему входу переключателя приемопередачи 2, а модулирующий вход подключен к выходу импульсного модулятора 12, генератор промежуточной частоты 13, выход которого подключен к опорному входу первого когерентного детектора 6, второй смеситель 14, первый вход которого подключен ко второму выходу задающего генератора 10, второй вход - к выходу генератора промежуточной частоты 13, а выход - к опорному входу первого смесителя 3, последовательно соединенные второй фазовращатель 15, вход которого соединен с выходом генератора промежуточной частоты 13, второй когерентный детектор 16, сигнальный вход которого подключен к выходу строб-каскада 5, и второй фильтр доплеровских частот 17, выход которого подключен ко второму входу фазового детектора 9, и индикатор 18.
В отличие от прототипа, в него введены последовательно соединенные блок выделения постоянной составляющей 19, вход которого подключен к выходу фазового детектора 9, и блок сравнения полярностей 20, выход которого подключен к входу индикатора 18, последовательно соединенные блок вычитания постоянной составляющей 21, первый вход которого подключен к выходу фазового детектора 9, а второй вход подключен к выходу блока выделения постоянной составляющей 19, блок выделения модуляции периода повторения зондирующих импульсов 22 и блок сравнения модуляционных параметров 23, выход которого подключен ко второму входу блока сравнения полярностей 20, последовательно соединенные блок измерения искажений модуляционных параметров 24, вход которого подключен к выходу блока выделения модуляции периода повторения зондирующих импульсов 22, генератор модуляции периода повторения зондирующих импульсов 25 и блок компенсации временной задержки 26, выход которого подключен ко второму входу блока сравнения модуляционных параметров 23, блок частотной коррекции 27, вход которого подключен к выходу второго фильтра доплеровских частот 17, а выход подключен к управляющему входу блока компенсации временной задержки 26. Выход генератора модуляции периода повторения зондирующих импульсов 25 подключен также к управляющему входу импульсного модулятора 12.
Заявляемое устройство работает следующим образом.
Стабильные колебания задающего генератора 10 частоты F0 усиливаются в усилителе мощности 11 и после импульсной модуляции, осуществляемой импульсным модулятором 12, пройдя переключатель приемопередачи 2, излучаются антенной 1 в пространство с изменяющимся периодом повторения зондирующих импульсов. Частота повторения зондирующих импульсов периодически меняется, например, по гармоническому закону около некоторой средней величины Fповт.ср. с частотой модуляции Fмод, задаваемой генератором модуляции периода повторения зондирующих импульсов 25 (фиг.3, а и фиг.5, а). Спектр излученного сигнала (фиг.2, а и фиг.6, а) является линейчатым и содержит основную (нулевую) гармонику, которая не изменяет своего положения на оси частот при модуляции периода повторения зондирующих импульсов, и боковые гармоники как слева, так и справа от основной частоты, отстоящие друг от друга в среднем на величину Fповт.ср. Модуляция периода повторения зондирующих импульсов по гармоническому закону приводит к тому, что гармонические составляющие изменяют свое положение на оси частот во времени, причем гармонические составляющие изменяют свое положение на оси частот относительно основной (нулевой) гармоники в противоположные направления. С увеличением номера гармоники частотные девиации гармоники на оси частот увеличиваются пропорционально номеру гармоники.
Зондирующие импульсы, отраженные от цели, принимаются антенной 1 и через переключатель приемопередачи 2 поступают на сигнальный вход первого смесителя 3. Все гармонические составляющие зондирующего сигнала, отраженного от движущейся цели, получают доплеровское смещение ±FД того или иного знака, в зависимости от направления движения цели (фиг.2, б, в, г и фиг.4, б, в, г). С помощью второго смесителя 14, на первый вход которого подаются колебания с частотой F0 со второго выхода задающего генератора 10, а на второй вход которого подаются колебания с частотой FПР от генератора промежуточной частоты 13, формируется гетеродинный сигнал, подаваемый на опорный вход первого смесителя 3. Далее сигнал поступает на УПЧ 4, где усиливается до необходимого уровня. Выходной сигнал УПЧ 4 далее стробируется на определенной дальности в строб-каскаде 5. Сигнал с выхода строб-каскада 5 поступает на сигнальные входы первого 6 и второго 16 когерентных детекторов и содержит гармонические составляющие, кратные частоте повторения зондирующих импульсов FП, как сигналов движущихся целей (фиг.2, ц и фиг.4, ц), так и пассивных помех (фиг.2, п и фиг.4, п), причем сигналы движущихся целей имеют доплеровскую поправку FД.
На опорный вход первого когерентного детектора 6 подаются стабильные колебания с выхода генератора промежуточной частоты 13. Сигнал с выхода первого когерентного детектора 6 поступает на вход первого фильтра доплеровских частот 7 с полосой пропускания ΔF=Fmax-Fmin (фиг.2, д и фиг.4, д). Нижняя граничная частота Fmin пропускания устанавливается равной ширине спектра основной гармоники пассивной помехи, а в случае отсутствия пассивных помех Fmin=0. Верхняя граничная частота Fmax пропускания устанавливается равной Fmax=Fповт.ср/2. Этим достигается подавление сигналов пассивных помех и устранение влияния всех гармоник спектра сигнала цели, кроме ближайшей к промежуточной частоте FПР на результат определения знака направления движения цели. С выхода первого фильтра доплеровских частот 7 сигнал поступает на вход первого фазовращателя 8, который сдвигает фазу сигнала на плюс 90 град. и далее на первый вход фазового детектора 9.
На опорный вход второго когерентного детектора 16 сигнал с выхода генератора промежуточной частоты 13 поступает через второй фазовращатель 15, который осуществляет сдвиг фазы сигналов на минус 90 град. Сигнал с выхода второго когерентного детектора 16 поступает на вход второго фильтра доплеровских частот 17 с полосой пропускания ΔF=Fmax-Fmin (фиг.2, д и фиг.4, д), равной полосе пропускания первого фильтра доплеровских частот 7, и далее на второй вход фазового детектора 9.
Ближайшая к частоте колебаний Fпр генератора промежуточной частоты 13 гармоника сигнала цели, прошедшая через первый 7 и второй 17 фильтры доплеровских частот, в результате приведенных выше преобразований, на входах фазового детектора 9, окажется либо в фазе, если она имеет частоту большую, чем Fпр, либо в противофазе, если она имеет частоту меньшую, чем Fпр. Коэффициент передачи входных и выходных цепей фазового детектора 9 зависит от величины частоты входного сигнала.
В результате работы фазового детектора 9 на его выходе формируется постоянное напряжение, полярность которого зависит от соотношения фаз сигналов на его входах, а величина зависит от величины частоты на выходах первого 7 и второго 17 фильтров доплеровских частот. Зависимость выходного напряжения фазового детектора 9 от частоты входного сигнала представлена на фиг.2, д и фиг.4, д.
Если в полосу пропускания фильтров доплеровских частот 7 и 17 попадают биения основной гармоники сигнала цели, частотный сдвиг FД<FП/2 которой обусловлен движением цели, и напряжения промежуточной частоты с выхода генератора промежуточной частоты 13 (фиг.2, б и фиг.4, б), то на выходе фазового детектора 9 будет постоянное напряжение, полярность которого зависит от смещения и величина которого не изменяется при модуляции периода повторения зондирующих импульсов (фиг.3, б и фиг.5, б), так как основная гармоника зондирующего сигнала также не изменяется по частоте (фиг.2, а и фиг.4, а) при модуляции периода повторения зондирующих импульсов.
Если в полосу пропускания фильтров доплеровских частот 7 и 17 попадают биения любой другой гармоники сигнала цели, частотный сдвиг которой обусловлен доплеровским смещением, и напряжения промежуточной частоты с выхода генератора промежуточной частоты 13 (фиг.2, в, г и фиг.4, в, г), то на выходе фазового детектора 9 будет напряжение, величина которого периодически изменяется по гармоническому закону около некоторой средней величины постоянной составляющей той или иной полярности (соответственно фиг.3, в, г и фиг.5, в, г). Закон этого изменения определяется напряжением (фиг.3, а и фиг.5, а) генератора модуляции периода повторения зондирующих импульсов 25.
Напряжение с выхода фазового детектора 9 одновременно подается на блок выделения постоянной составляющей 19 и на блок вычитания постоянной составляющей 21. Напряжение с выхода блока выделения постоянной составляющей 19 подается на первый вход блока сравнения полярностей 20 и на второй вход блока вычитания постоянной составляющей 21, который вычитает среднюю величину постоянной составляющей входного напряжения, относительно которой выходное напряжение фазового детектора 9 изменяется, например, по гармоническому закону.
Сигнал с выхода блока вычитания постоянной составляющей 21 подается на вход блока выделения модуляции периода повторения зондирующих импульсов 22, выходной сигнал которого соответствует изменению во времени частоты биений гармоники сигнала цели, попадающей в полосы пропускания первого 7 и второго 17 фильтров доплеровских частот, и напряжения промежуточной частоты с выхода генератора промежуточной частоты 13, происходящих при модуляции периода повторения зондирующих импульсов. Далее выделенное из сигнала цели напряжение модуляции периода повторения зондирующих импульсов поступает на первый вход блока сравнения модуляционных параметров 23, на второй вход которого поступает напряжение модуляции (фиг.3, а и фиг.5, а) от генератора модуляции периода повторения зондирующих импульсов 25, прошедшее через блок компенсации временной задержки 26.
Блок компенсации временной задержки 26 осуществляет задержку на некоторое время напряжения модуляции с выхода генератора модуляции периода повторения зондирующих импульсов 25, чтобы скомпенсировать временную задержку модуляционных параметров выделяемых из сигнала цели, обусловленную задержкой сигналов цели в цепях устройства, особенно в фильтрах доплеровских частот 7 и 17, не учет которой может привести к неправильному определению знака направления движения цели. Величина временной задержки в фильтрах доплеровских частот 7 и 17 зависит от величины частоты биений гармоники сигнала цели и сигнала промежуточной частоты и изменяется в широких пределах. Поэтому сигнал с выхода второго фильтра доплеровских частот 17 поступает также на вход блока частотной коррекции 27, который вырабатывает напряжение, пропорциональное величине временной задержки в фильтрах доплеровских частот 7 и 17 в зависимости от величины частоты биений, и которое подается на второй вход блока компенсации временной задержки 26 и управляет величиной временной задержки напряжения модуляции в блоке компенсации временной задержки 26.
В том случае, когда доплеровское смещение сигнала цели велико FП>FП/2, в полосы пропускания фильтров доплеровских частот 7 и 17 попадает такая гармоника сигнала цели, которая имеет большую девиацию частоты, вызванную модуляцией частоты повторения зондирующих импульсов. В результате закон изменения напряжения на первом входе блока сравнения модуляционных параметров 23 отличается от гармонического и имеет большие искажения, которые могут привести к неправильному определению знака направления движения цели. Чтобы этого избежать, напряжение с выхода блока выделения модуляции периода повторения зондирующих импульсов 22 подается на вход блока измерения искажений модуляционных параметров 24, который вырабатывает напряжение, изменяющее в импульсном модуляторе 12 глубину (амплитуду) модуляции (вобуляции) периода повторения зондирующих импульсов до тех пор, пока напряжение на выходе блока выделения модуляции периода повторения зондирующих импульсов 22, вызванное девиацией частоты гармоники под действием модуляции периода повторения зондирующих импульсов, не станет изменяться по гармоническому закону.
В результате на оба входа блока сравнения модуляционных параметров 23 подаются гармонические колебания. Этот блок осуществляет сравнение фаз параметров модуляции и подает сигнал на второй вход блока сравнения полярностей 20.
Если цель удаляется (фиг.2, в, г), то напряжение на первом входе блока сравнения модуляционных параметров 23 (фиг.3, в, г) окажется в фазе с напряжением модуляции (фиг.3, а), подаваемым на его второй вход, и блок сравнения модуляционных параметров 23 вырабатывает напряжение одной, например, отрицательной полярности.
Если цель приближается (фиг.4, в, г), то напряжение на первом входе блока сравнения модуляционных параметров 23 (фиг.5, в, г) окажется в противофазе с напряжением модуляции (фиг.5, а), подаваемым на его второй вход, и блок сравнения модуляционных параметров 23 вырабатывает напряжение другой, например, положительной полярности.
Если скорость движения цели невелика (фиг.2, б и фиг.4, б), то напряжение на выходе фазового детектора 9 не будет изменяться вследствие модуляции (фиг.5, б), и на выходе блока выделения модуляции периода повторения зондирующих импульсов 22 напряжение будет отсутствовать. В этом случае блок сравнения модуляционных параметров 23 не вырабатывает никакого напряжения и на второй вход блока сравнения полярностей 20 поступает нулевой сигнал.
Блок сравнения полярностей 20 сравнивает полярности напряжений, поступающих от блока выделения постоянной составляющей 19 и от блока сравнения модуляционных параметров 23. Блок 20 вырабатывает отрицательное напряжение, соответствующее удаляющейся цели, если полярность напряжения с выхода блока сравнения модуляционных параметров 23 отрицательная, при любой полярности напряжения с выхода блока выделения постоянной составляющей 19, и если полярность напряжения с выхода блока выделения постоянной составляющей 19 отрицательная, а с выхода блока сравнения модуляционных параметров 23 поступает нулевой сигнал.
Блок 20 вырабатывает положительное напряжение, соответствующее приближающейся цели, если полярность напряжения с выхода блока сравнения модуляционных параметров 23 положительная, при любой полярности напряжения с выхода блока выделения постоянной составляющей 19, и если полярность напряжения с выхода блока выделения 19 положительна, а с выхода блока сравнения 23 поступает нулевой сигнал. Напряжение той или иной полярности в соответствии со знаком направления движения цели с выхода блока сравнения полярностей 20 подается на индикатор 18, где осуществляется индикация знака направления движения цели.
Такая оценка пропорциональности между изменением закона модуляции периода повторения зондирующих импульсов и изменением частоты гармоники сигнала цели после доплеровской фильтрации возможна с высокой точностью практически при любом знаке и величине доплеровского сдвига частоты сигнала цели, что обеспечивает повышение диапазона оценки знака направления движения цели.
Устройство-прототип, основанное на определении знака доплеровского смещения сигналов целей, позволяет определять знак направления движения цели только в узком диапазоне скоростей, когда доплеровское смещение не превышает половины частоты повторения зондирующих импульсов. При этом особую трудность представляет определение знака направления движения высокоскоростной цели при импульсном зондировании пространства.
Предлагаемое устройство для определения знака направления движения цели обладает существенным преимуществом по сравнению с устройством-прототипом и обеспечивает расширение диапазона скоростей целей однозначного определения знака направления движения.
Технический результат от использования предлагаемого устройства для определения знака направления движения цели заключается в расширении диапазона скоростей цели однозначного определения знака направления движения цели за счет расширения диапазона частот, в котором определяется знак доплеровского смещения частоты сигнала цели, что особенно важно для анализа сигнала высокоскоростной и высокоманевренной цели.
Реализация устройства не вызывает практических трудностей, так как вновь вводимые блоки представляют собой завершенные функциональные узлы, выполняемые на основе известных и широко распространенных радиотехнических элементов, выпускаемых отечественной промышленностью.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОБНАРУЖЕНИЯ И КЛАССИФИКАЦИИ НАДВОДНЫХ ЦЕЛЕЙ | 2005 |
|
RU2287840C1 |
| СПОСОБ ОДНОЗНАЧНОГО ИЗМЕРЕНИЯ РАДИАЛЬНОЙ СКОРОСТИ ЦЕЛИ В КОГЕРЕНТНО-ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ | 2014 |
|
RU2574079C1 |
| ПРИЕМНО-ПЕРЕДАЮЩЕЕ УСТРОЙСТВО | 1993 |
|
RU2037840C1 |
| СПОСОБ КОГЕРЕНТНОГО ПРИЕМА ОТРАЖЕННОГО СИГНАЛА ПРИ НЕКОГЕРЕНТНОМ ИЗЛУЧЕНИИ ЗОНДИРУЮЩЕГО СИГНАЛА И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2315331C1 |
| УСТРОЙСТВО СЕЛЕКЦИИ ДВИЖУЩИХСЯ ЦЕЛЕЙ | 1994 |
|
RU2091809C1 |
| СПОСОБ СНИЖЕНИЯ НИЖНЕЙ ГРАНИЦЫ ИЗМЕРЕНИЯ МАЛЫХ ВЫСОТ ДО НУЛЯ И УСТРОЙСТВО КОГЕРЕНТНОГО ИМПУЛЬСНО-ДОПЛЕРОВСКОГО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2008 |
|
RU2412450C2 |
| СПОСОБ ОБНАРУЖЕНИЯ ЦЕЛЕЙ ИМПУЛЬСНОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИЕЙ И РАДИОЛОКАЦИОННАЯ СТАНЦИЯ ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2270461C2 |
| КОГЕРЕНТНО-ИМПУЛЬСНЫЙ РАДИОЛОКАТОР | 2012 |
|
RU2503972C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ ЗНАКА НАПРАВЛЕНИЯ ДВИЖЕНИЯ ЦЕЛИ | 2004 |
|
RU2267138C1 |
| СПОСОБ СОПРОВОЖДЕНИЯ ЦЕЛИ И УСТРОЙСТВО МОНОИМПУЛЬСНОЙ РЛС, РЕАЛИЗУЮЩЕЙ СПОСОБ | 2007 |
|
RU2338219C1 |
Изобретение относится к радиолокационной технике, в частности к радиолокационным системам для определения знака направления движения цели. Сущность изобретения заключается в том, что в устройство для определения знака направления движения цели, содержащее антенну, переключатель приемо-передачи, первый смеситель, усилитель промежуточной частоты, строб-каскад, первый когерентный детектор, первый фильтр доплеровских частот, первый фазовращатель, фазовый детектор, задающий генератор, усилитель мощности, импульсный модулятор, генератор промежуточной частоты, второй смеситель, второй фазовращатель, второй когерентный детектор, второй фильтр доплеровских частот и индикатор, введены блок выделения постоянной составляющей, блок сравнения полярностей, блок вычитания постоянной составляющей, блок выделения модуляции периода повторения зондирующих импульсов, блок сравнения модуляционных параметров, блок измерения искажений модуляционных параметров, генератор модуляции периода повторения зондирующих импульсов и блок компенсации временной задержки, блок частотной коррекции. Достигаемый технический результат - расширение диапазона скоростей целей однозначного определения знака направления движения цели. 5 ил.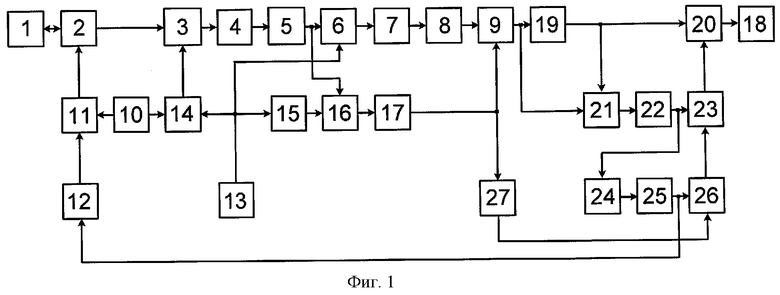
Устройство для определения знака направления движения цели, содержащее последовательно соединенные антенну, переключатель приемопередачи, первый смеситель, усилитель промежуточной частоты, строб-каскад, первый когерентный детектор, первый фильтр доплеровских частот, первый фазовращатель и фазовый детектор, последовательно соединенные задающий генератор и усилитель мощности, выход которого подключен к передающему входу переключателя приемопередачи, а модулирующий вход усилителя мощности подключен к выходу импульсного модулятора, генератор промежуточной частоты, выход которого подключен к опорному входу первого когерентного детектора, второй смеситель, первый вход которого подключен ко второму выходу задающего генератора, второй вход - к выходу генератора промежуточной частоты, а выход - к опорному входу первого смесителя, последовательно соединенные второй фазовращатель, вход которого соединен с выходом генератора промежуточной частоты, второй когерентный детектор, сигнальный вход которого подключен к выходу строб-каскада, и второй фильтр доплеровских частот, выход которого подключен ко второму входу фазового детектора, и индикатор, отличающееся тем, что в него введены последовательно соединенные блок выделения постоянной составляющей, вход которого подключен к выходу фазового детектора, и блок сравнения полярностей, выход которого подключен к входу индикатора, последовательно соединенные блок вычитания постоянной составляющей, первый вход которого подключен к выходу фазового детектора, а второй вход подключен к выходу блока выделения постоянной составляющей, блок выделения модуляции периода повторения зондирующих импульсов и блок сравнения модуляционных параметров, выход которого подключен ко второму входу блока сравнения полярностей, последовательно соединенные блок измерения искажений модуляционных параметров, вход которого подключен к выходу блока выделения модуляции периода повторения зондирующих импульсов, генератор модуляции периода повторения зондирующих импульсов и блок компенсации временной задержки, выход которого подключен ко второму входу блока сравнения модуляционных параметров, блок частотной коррекции, вход которого подключен к выходу второго фильтра доплеровских частот, а выход подключен к управляющему входу блока компенсации временной задержки, причем выход генератора модуляции периода повторения зондирующих импульсов подключен также к управляющему входу импульсного модулятора.
| Итоги науки и техники | |||
| Радиотехника, т.3, Радиолокация и радионавигация, Ред | |||
| МИРАМАНОВ Р.Г., Москва, ВИНИТИ, 1972, стр.128, рис.24 | |||
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЛИНЕЙНОЙ И УГЛОВОЙ СКОРОСТЕЙ И УГЛОВ ПОВОРОТА ДВИЖУЩЕГОСЯ ОБЪЕКТА | 1994 |
|
RU2097700C1 |
| РАДИОЛОКАЦИОННЫЙ СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ ДВИЖЕНИЯ ОБЪЕКТА | 1998 |
|
RU2133480C1 |
| US 2002060639 A1, 23.05.2002 | |||
| Многокамерный гидравлический классификатор | 1981 |
|
SU963562A1 |

