Изобретение относится к области авиационной техники и может быть применено в летательных аппаратах с вертикальным взлетом и посадкой, использующих аэродинамические подъемно-тянущие движители.
Известен аэродинамический подъемно-тянущий движитель, содержащий раму со средством движения рамы по окружности относительно оси движения и по крайней мере две аэродинамические поверхности, установленные на раме и имеющие средство для вращения каждой аэродинамической поверхности относительно оси вращения, параллельной оси движения, по окружности, и средство для колебаний каждой аэродинамической поверхности синхронно с вращением относительно двух взаимно перпендикулярных осей, находящихся соответственно в двух взаимно перпендикулярных плоскостях, пересекающихся по оси вращения аэродинамической поверхности, а одна из плоскостей проходит через ось движения по окружности и ось вращения аэродинамической поверхности (патент РФ №2227107, В 64 С 39/08, 2004, ближайший аналог).
Недостатком известного аэродинамического подъемно-тянущего движителя является его недостаточная эффективность при сохранении компактности.
Известны вертолеты двухвинтовой соосной схемы, например вертолет Ка-26, содержащий корпус с расположенными на нем двумя соосными несущими винтами (Изаксон А.М. "Советское вертолетостроение", Москва, "Машиностроение", с.242-245).
Однако в известных вертолетах используются несущие винты, имеющие недостаточную эффективность создания подъемной силы, вследствие чего для получения приемлемых величин подъемной силы к ним необходимо подводить значительную мощность, что приводит к снижению дальности полета и высоты подъема вертолета.
В предложенном изобретении использован новый двухступенчатый аэродинамический подъемно-тянущий движитель, которым обеспечивается высокая эффективность создания как подъемной силы, так и горизонтальной тяги.
В уровне техники не обнаружены аналоги - средства того же назначения, а именно летательные аппараты вертикального взлета и посадки с двухступенчатым аэродинамическим подъемно-тянущим движителем.
В основу изобретения поставлена задача создания двухступенчатого аэродинамического подъемно-тянущего движителя, в котором обеспечивается высокая эффективность при сохранении компактности за счет использования экранного эффекта, увеличивающего подъемную аэродинамическую силу и горизонтальную тягу движителя при взаимном поступательном движении аэродинамических поверхностей обеих ступеней.
Задача создания двухступенчатого аэродинамического подъемно-тянущего движителя решается тем, что двухступенчатый аэродинамический подъемно-тянущий движитель содержит две одинаковые соосные рамы со средством для движения рам по окружности относительно оси движения в противоположные стороны и по крайней мере две аэродинамические поверхности, установленные на каждой из рам и имеющие средства для вращения каждой аэродинамической поверхности относительно оси вращения, параллельной оси движения, синхронно с движением по окружности в сторону, противоположную движению соответствующей рамы, и средства для колебаний каждой аэродинамической поверхности синхронно с вращением относительно двух взаимно перпендикулярных осей, находящихся соответственно в двух взаимно перпендикулярных плоскостях, пересекающихся по оси вращения аэродинамической поверхности, а одна из плоскостей проходит через ось движения по окружности и ось вращения аэродинамической поверхности.
Выполнение двухступенчатого аэродинамического подъемно-тянущего движителя, содержащего две одинаковые соосные рамы со средством для движения рам по окружности относительно оси движения в противоположные стороны и по крайней мере две аэродинамические поверхности, установленные на каждой из рам и имеющие средства для вращения каждой аэродинамической поверхности относительно оси вращения, параллельной оси движения, синхронно с движением по окружности в сторону, противоположную движению соответствующей рамы, и средства для колебаний каждой аэродинамической поверхности синхронно с вращением относительно двух взаимно перпендикулярных осей, находящихся соответственно в двух взаимно перпендикулярных плоскостях, пересекающихся по оси вращения аэродинамической поверхности, а одна из плоскостей проходит через ось движения по окружности и ось вращения аэродинамической поверхности, обеспечивает поступательное (без вращения) движение аэродинамических поверхностей относительно воздуха на каждой из рам и равномерное распределение аэродинамических сил по аэродинамической поверхности, приводящее к высокой эффективности подъемной силы. Совершение колебаний каждой аэродинамической поверхности обеспечивает одновременно с созданием подъемной силы создание горизонтальной тяги. Соосное расположение двух рам с аэродинамическими поверхностями обеспечивает компактность движителя и позволяет использовать экранный эффект, возникающий при движении аэродинамических поверхностей друг над другом, увеличивающий подъемную силу и горизонтальную тягу.
В основу изобретения поставлена задача создания впервые летательного аппарата вертикального взлета и посадки с двухступенчатым аэродинамическим подъемно-тянущим движителем.
Задача создания летательного аппарата вертикального взлета и посадки с двухступенчатым аэродинамическим подъемно-тянущим движителем решается тем, что летательный аппарат вертикального взлета и посадки с двухступенчатым аэродинамическим подъемно-тянущим движителем содержит корпус с установленным на нем двухступенчатым движителем, установленный на хвостовой части корпуса винт, ось вращения которого проходит в продольной плоскости симметрии корпуса горизонтально и ниже центра масс летательного аппарата.
Выполнение летательного аппарата вертикального взлета и посадки с двухступенчатым аэродинамическим подъемно-тянущим движителем, содержащего корпус с установленным на нем двухступенчатым движителем, установленный на хвостовой части корпуса винт, ось вращения которого проходит в продольной плоскости симметрии корпуса горизонтально и ниже центра масс летательного аппарата, позволяет осуществлять полет летательного аппарата и при этом компенсировать момент на пикирование усилием, создаваемым винтом, проходящим ниже центра масс летательного аппарата.
Выбор расстояния от центра масс до линии, проходящей через ось вращения винта, определяется из условия обеспечения равновесия сил, действующих на летательный аппарат.
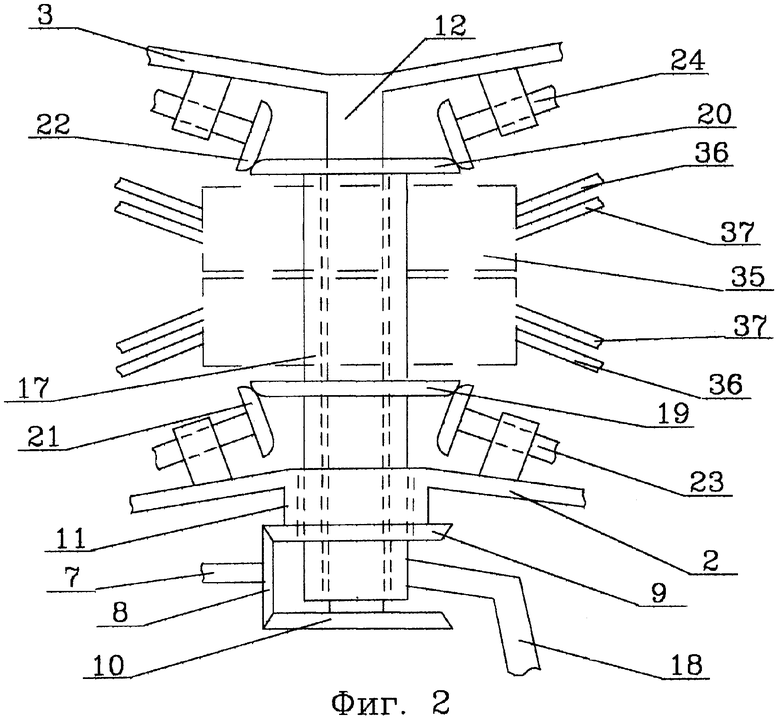
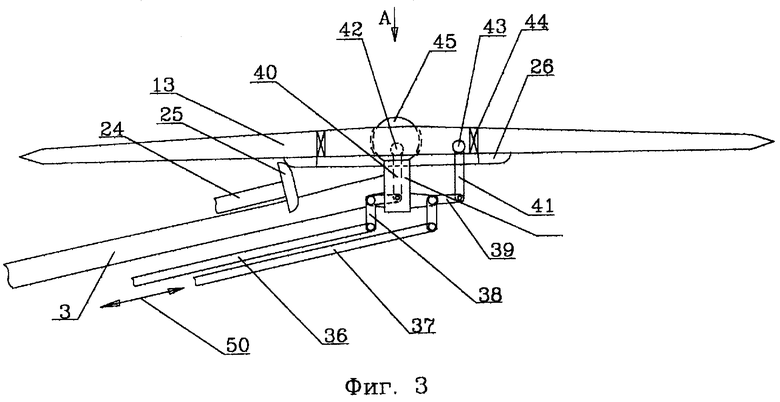
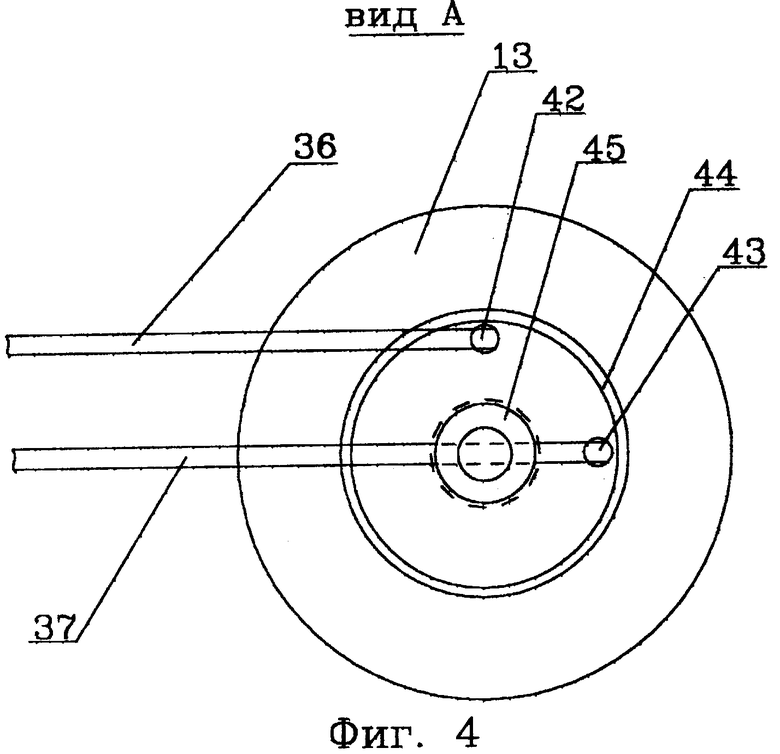
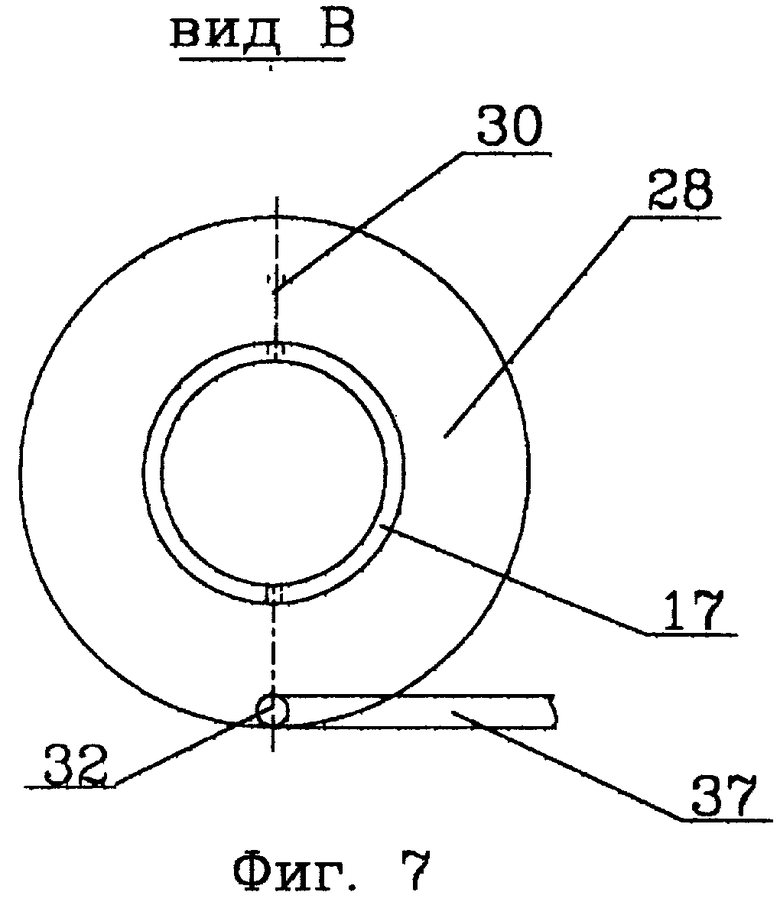
На фиг.1 изображен вид сверху на верхнюю раму двухступенчатого аэродинамического подъемно-тянущего движителя; на фиг.2 - вид сбоку на аэродинамический подъемно-тянущий движитель (без аэродинамических поверхностей); на фиг.3 - вид сбоку на часть двухступенчатого аэродинамического подъемно-тянущего движителя с аэродинамической поверхностью; на фиг.4 - вид А на фиг.3; на фиг.5 - вид сбоку на верхнюю половину центральной части двухступенчатого аэродинамического подъемно-тянущего движителя; на фиг.6 - вид Б на фиг.5; на фиг.7 - вид В на фиг.5; на фиг.8 - общий вид летательного аппарата вертикального взлета и посадки с двухступенчатым аэродинамическим подъемно-тянущим движителем; на фиг.9 - схема аэродинамических сил, действующих на летательный аппарат в горизонтальном полете.
Двухступенчатый аэродинамический подъемно-тянущий движитель 1 содержит одинаковые соосные рамы 2 и 3 (нижняя и верхняя) со средством для движения рам по окружности относительно оси движения 4 в противоположные стороны друг относительно друга, выполненном, например, в виде выходного вала 7 (Фиг.2), соединенного с ним двигателя (на чертеже не показан), приводящего выходной вал 7 во вращение, и редуктора, одна коническая шестерня 8 которого закреплена на выходном валу 7, а две другие кинематически связанные с ней конические шестерни 9 и 10, закрепленные соответственно на трубчатом стержне 11, прикрепленном на раме 2 и на стержне 12, закрепленном на раме 3.
Рамы 2 и 3 располагаются на минимальном расстоянии друг от друга, обеспечивающем свободное движение аэродинамических поверхностей 13 на каждой из ступеней движителя.
По крайней мере две аэродинамические поверхности 13 установлены на каждой из рам 2 и 3 и имеют средства для вращения каждой аэродинамической поверхности 13 относительно оси вращения 14 параллельной оси движения 4 синхронно с движением по окружности и средства для колебаний каждой аэродинамической поверхности 13 синхронно с вращением относительно двух взаимно перпендикулярных осей 15 и 16, находящихся соответственно в двух взаимно перпендикулярных плоскостях, пересекающихся по оси вращения 14 аэродинамической поверхности 13, а одна из плоскостей проходит через ось движения 4 по окружности и ось вращения 14 аэродинамической поверхности 13.
Средство для вращения каждой аэродинамической поверхности 13 может быть выполнено, например, в виде трубчатого стержня 17 (Фиг.2 и 3), закрепленного на корпусе 18 летательного аппарата, прикрепленных к трубчатому стержню 17 задающих шестерен 19 и 20, кинематически связанных с ними соответственно шестерен 21 и 22 закрепленных к соответствующим качающимся раздвижным валам 23 и 24, на концах которых закреплены конические ведущие шестерни 25. На каждой аэродинамической поверхности 13 на ее центральной части закреплена коническая ведомая шестерня 26, кинематически связанная с конической ведущей шестерней 25. Каждый качающийся раздвижной вал 23 и 24 прикреплен к соответствующей раме 2 и 3. Качающиеся раздвижные валы 23 и 24 могут быть выполнены с карданным шарниром.
Средство для колебаний аэродинамической поверхности может быть выполнено, например в виде копира 27 (Фиг.3, 4, 5 и 6) отклонений в касательной плоскости и копира 28 отклонений в радиальной плоскости, выполненных в виде плоских колец и установленных соответственно на осях 29 и 30 отклонений копиров 27 и 28 с возможностью качения. Ось 29 отклонений копира 27 установлена на муфте 5, которая в свою очередь установлена на трубчатом стержне 17 с возможностью перемещения вдоль трубчатого стержня 17. Ось 30 отклонений копира 28 установлена на трубчатом стержне 17. По краю каждого из копиров 27 и 28 установлены соответственно толкатели 31 и 32 со смещением друг от друга на 90°. Толкатели 31 и 32 с помощью соответствующих рычажных передач соединены с аэродинамической поверхностью 13. Рычажные передачи могут быть выполнены в виде переводчиков направления 33 и 34, закрепленных на кожухе 35 прикрепленном к раме 3 и соответствующих наклонных тяг 36 и 37 и вторых переводчиков направления 38 и 39 в вертикальное направление, соединенных со вторыми толкателями 40 и 41, заканчивающихся шарнирами 42 и 43, размещенными в центральной части аэродинамической поверхности по ее краям со смещением друг от друга на 90°.
В центральной части аэродинамической поверхности 13 установлен шаровой подшипник 45, который с помощью опоры 46 прикреплен к раме 3.
Аэродинамическая поверхность 13 состоит из двух частей - центральной (неподвижной относительно рамы 3) и периферийной с закрепленной на ней конической ведомой шестерней 26, соединенных между собой подшипником 44 и установленной с возможностью вращения.
На копирах 27 и 28, а также муфте 5 установлены соответственно штоки 47, 48 49 приводов управления (на чертеже не показаны) или рычаги рычажного механизма управления, которые обеспечивают требуемые отклонения и колебания аэродинамической поверхности 13.
Стрелками 50 на фиг.3, 5 показаны направления продольного перемещения наклонных тяг 36 и 37, стрелками 51 (на фиг.5) направления перемещения толкателей 31 и 32, а стрелками 52 направления поворотов копиров 27 и 28.
Аналогично выполняется средство для колебания аэродинамической поверхности 13 на раме 2.
Средства для движения по окружности каждой из рам 2 и 3, средства для вращения аэродинамической поверхности и средства для колебаний аэродинамической поверхности могут быть выполнены по другому, например так, как описано в патенте РФ №2227107, В 64 С 39/08, 2004 г.; в патенте РФ №2232105, В 64 С 39/08, 2004 г.; международной публикации WO 03/086857 от 23.10.2003, В 64 С 11/46, 27/08; международной публикации WO 03/086858 от 23.10.2003, В 64 С 11/46, 27/08. Возможны и другие варианты выполнения вышеназванных средств по широко известным схемам.
Летательный аппарат вертикального взлета и посадки с двухступенчатым аэродинамическим подъемно-тянущим движителем 1 содержит корпус 53 (Фиг.8) с установленным на нем двухступенчатым аэродинамическим подъемно-тянущим движителем 1, установленный на хвостовой части корпуса винт 54, ось вращения которого проходит в продольной плоскости симметрии корпуса 53 горизонтально и ниже центра масс 55 летательного аппарата.
На режиме горизонтального полета летательного аппарата (Фиг.9) двухступенчатым аэродинамическим подъемно-тянущим движителем 1 создается подъемная аэродинамическая сила 56 и горизонтальная тяга 57. Момент на пикирование 58 относительно оси Z создается от горизонтальной тяги 57, а компенсирующий момент 59 создается тягой 60 винта 54, расположенного ниже центра масс 55 летательного аппарата. Направление полета показано стрелкой 61.
Двухступенчатый аэродинамический подъемно-тянущий движитель работает следующим образом.
Рамы 2 и 3 вместе с аэродинамическими поверхностями 13 движутся относительно оси движения 4 по окружности в противоположные стороны друг относительно друга с помощью средства для движения рам по окружности, например так, как описано в материалах настоящего изобретения, где движение от выходного вала 7 через коническую шестерню 9, трубчатый стержень 11 передается на раму 2 и через коническую шестерню 10, стержень 12 передается на раму 3.
Одновременно каждая аэродинамическая поверхность 13 вместе с движениями рам 2 и 3 по окружности относительно оси движения 4 синхронно с движением по окружности вращается в сторону, противоположную движению соответствующих рам 2 и 3 с помощью средства для вращения аэродинамической поверхности, например так, как описано в материалах настоящего изобретения, где движение по окружности рамы 3 и рамы 2 передается на шестерни 22 и 21 перекатывающиеся по закрепленным задающим шестерням 20 и 19 и через качающиеся раздвижные валы 24 и 23 на ведущие шестерни 25 передающие вращение на ведомые шестерни 26, закрепленные на аэродинамических поверхностях 13, и приводящие во вращение аэродинамические поверхности 13. Таким образом, создается поступательное движение аэродинамических поверхностей 13 относительно воздуха.
Каждая аэродинамическая поверхность 13 совершает синхронно с вращением колебания относительно двух взаимно перпендикулярных осей 15 и 16 с помощью средства для колебаний аэродинамической поверхности, например так, как описано в материалах настоящего изобретения, где при неподвижных копирах 27 и 28 соответственно толкатели 31 и 32, закрепленные через рычажную передачу на раме 3 и 2, скользят по краю копиров 27 и 28 вместе с движением по окружности рам 3 и 2. При отклонении копиров 27 и 28 от горизонтального положения толкатели 31 и 32 совершают синусоидальные перемещения вверх-вниз синхронно со скольжением толкателей 31 и 32 и, следовательно, с вращением рам 3 и 2. Через переводчики направления 33 и 34, тяги 36 и 37, вторые переводчики направления 38 и 39, вторые толкатели 40 и 41 с шарнирами 42 и 43 синусоидальные перемещения толкателей 31 и 32 переводятся в синусоидальное перемещение аэродинамической поверхности 13, то есть в ее колебания в двух взаимно перпендикулярных плоскостях - соответственно в касательной плоскости и в радиальной плоскости к аэродинамической поверхности 13, обеспечивая создание горизонтальной тяги с созданием подъемной силы. При перемещении муфты 5 вместе с копиром 27 в направлении перемещения толкателя 31 от штока 47 под действием приводов управления обеспечивается новое положение аэродинамической поверхности 13 относительно которого будут совершаться колебания, что расширяет возможные режимы работы движителя. Подъемные аэродинамические силы и горизонтальные тяги создаются на обеих ступенях движителя от обеих рам 2 и 3 с аэродинамическими поверхностями 13, где вследствие создания поступательного движения аэродинамических поверхностей 13 рам 2 и 3 и взаимного расположения аэродинамических поверхностей друг над другом возникает экранный эффект, увеличивающий подъемную силу и горизонтальную тягу.
Полет летательного аппарата вертикального взлета и посадки с двухступенчатым аэродинамическим подъемно-тянущим движителем осуществляется следующим образом.
Используется двухступенчатый аэродинамический подъемно-тянущий движитель 1 с тремя аэродинамическими поверхностями 13 на каждой из ступеней. Каждая аэродинамическая поверхность 13 на раме 3 движется по окружности вместе с рамой 3 в одну сторону, а на раме 2 движется по окружности вместе с рамой 2 в противоположную сторону и соответственно синхронно вращается в противоположную сторону движения по окружности относительно оси вращения 14 параллельной оси движения 4 с угловой скоростью равной угловой скорости движения по окружности. Создается поступательное движение аэродинамических поверхностей 13, обеспечивающее равномерное распределение аэродинамических сил по аэродинамическим поверхностям 13, приводящее к высокой эффективности создания подъемной силы. Каждая аэродинамическая поверхность 13 совершает колебания синхронно с вращением относительно двух взаимно перпендикулярных осей 15 и 16, находящихся соответственно в двух взаимно перпендикулярных плоскостях, пересекающихся по оси вращения 14 аэродинамической поверхности 13, причем одна из плоскостей проходит через ось движения 4 по окружности и ось вращения 14, при этом от каждой рамы 2 и 3 с аэродинамическими поверхностями 13 вместе с подъемной аэродинамической силой 56 создается и горизонтальная тяга 57, а распределение аэродинамических сил на аэродинамических поверхностях остается равномерным. При создании взаимно поступательного движения аэродинамических поверхностей 13 рам 2 и 3 возникает экранный эффект, увеличивающий подъемную аэродинамическую силу 56 и горизонтальную тягу 57.
При горизонтальном полете летательного аппарат действуют подъемная аэродинамическая сила 56 и горизонтальная тяга 57 двухступенчатого аэродинамического подъемно-тянущего движителя 1, создаваемые при его работе. От горизонтальной тяги 57 создается момент на пикирование 58, который уравновешивается компенсирующим моментом 59 создаваемым тягой 60 винта 54 расположенного ниже центра масс 55 аппарата.
Предложенный летательный аппарат вертикального взлета и посадки с двухступенчатым аэродинамическим подъемно-тянущим движителем позволяет осуществить полет летательного аппарата с высокой энергетической эффективностью.




Изобретение относится к области авиационной техники. Движитель 1 содержит две одинаковые соосные рамы со средством для движения рам по окружности относительно оси движения в противоположные стороны и две аэродинамические поверхности, установленные на каждой из рам и имеющие средства для вращения каждой аэродинамической поверхности относительно оси вращения, параллельной оси движения, синхронно с движением по окружности в сторону, противоположную движению соответствующей рамы, и средства для колебаний каждой аэродинамической поверхности синхронно с вращением относительно двух взаимно перпендикулярных осей, находящихся соответственно в двух взаимно перпендикулярных плоскостях, пересекающихся по оси вращения аэродинамической поверхности. Одна из плоскостей проходит через ось движения по окружности и ось вращения аэродинамической поверхности. Летательный аппарат содержит корпус 53 с установленным на нем двухступенчатым движителем 1, установленный на хвостовой части корпуса 53 винт 54, ось вращения которого проходит в продольной плоскости симметрии корпуса 53 горизонтально и ниже центра масс летательного аппарата. Технический результат - увеличение подъемной аэродинамической силы и горизонтальной тяги за счет использования экранного эффекта. 2 н.п. ф-лы, 9 ил.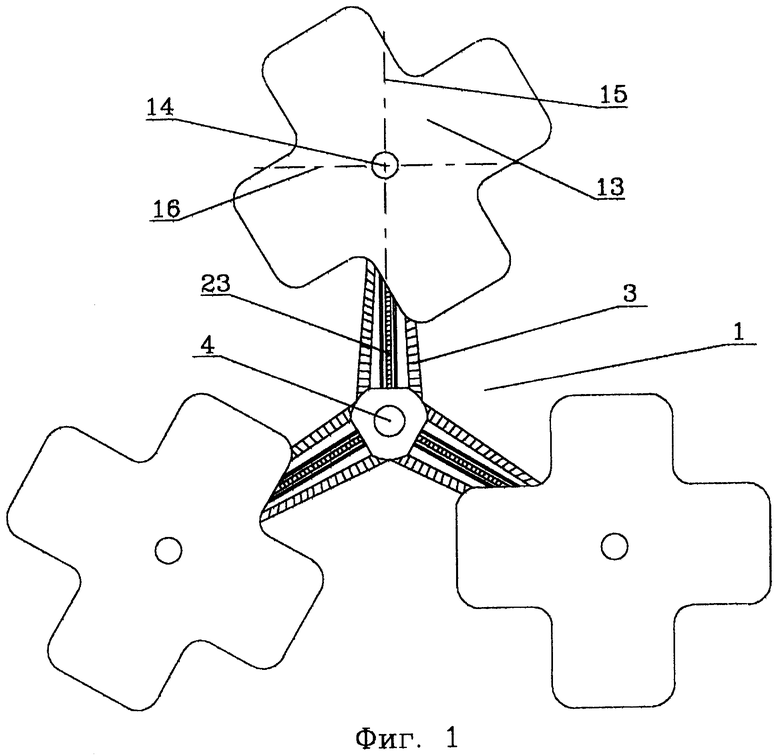
| СПОСОБ СОЗДАНИЯ ПОДЪЕМНОЙ СИЛЫ И ГОРИЗОНТАЛЬНОЙ ТЯГИ АЭРОДИНАМИЧЕСКИМИ ПОВЕРХНОСТЯМИ | 2002 |
|
RU2227107C2 |

