Изобретение относится к области авиационной техники и может быть применено в летательных аппаратах с вертикальным взлетом и посадкой, использующих аэродинамические подъемно-тянущие движители.
Известны вертолеты двухвинтовой продольной схемы, например вертолет ЯК-24, содержащий корпус, в хвостовой части которого размещен пилон, и размещенные на передней части корпуса и пилоне по продольной схеме два несущих винта (Изаксон А.М. "Советское вертолетостроение", Москва, "Маш", 1981, с.253-259).
Однако в известных вертолетах используются несущие винты, имеющие недостаточную эффективность создания подъемной силы, вследствие чего для получения приемлемых величин подъемной силы к ним необходимо подводить значительную мощность, что приводит к снижению дальности полета и высоты подъема вертолета.
В предложенном изобретении использован новый аэродинамический подъемно-тянущий движитель, которым обеспечивается высокая эффективность создания подъемной силы, так и горизонтальной тяги (патент РФ №2227107, В 64 С 39/08, 2004; международная публикация WO 03/086857 от 23.10.2003, МПК В 64 С 11/46, 27/08; международная публикация WO 03/086858 от 23.10.2003, МПК В 64 С 11/46, 27/08).
В уровне техники не обнаружены аналоги - средства того же назначения.
В основу изобретения поставлена задача создания впервые летательного аппарата вертикального взлета и посадки с двумя продольно расположенными аэродинамическими подъемно-тянущими движителями, каждый из которых выполнен с по крайней мере двумя аэродинамическими поверхностями, имеющими возможность движения по окружности, синхронного вращения в противоположную сторону относительно оси вращения параллельной оси движения и колебания каждой аэродинамической поверхности синхронно с вращением относительно двух взаимно перпендикулярных осей, находящихся соответственно в двух взаимно перпендикулярных плоскостях, пересекающихся по оси вращения аэродинамической поверхности, причем одна из плоскостей проходит через ось движения по окружности и ось вращения аэродинамической поверхности.
Задача создания летательного аппарат вертикального взлета и посадки с двумя продольно расположенными аэродинамическими подъемно-тянущими движителями решается тем, что в летательном аппарате вертикального взлета и посадки с двумя продольно расположенными аэродинамическими подъемно-тянущими движителями, каждый из которых выполнен с по крайней мере двумя аэродинамическими поверхностями, имеющими возможность движения по окружности, синхронного вращения в противоположную сторону относительно оси вращения параллельной оси движения и колебания каждой аэродинамической поверхности синхронно с вращением относительно двух взаимно перпендикулярных осей, находящихся соответственно в двух взаимно перпендикулярных плоскостях, пересекающихся по оси вращения аэродинамической поверхности, причем одна из плоскостей проходит через ось движения по окружности и ось вращения аэродинамической поверхности, содержащий корпус, в хвостовой части которого размещен пилон, на передней части корпуса и на пилоне в продольной плоскости симметрии корпуса установлены осями движения одинаковые движители с наклоном вперед от вертикали на угол менее 10°, аэродинамические поверхности движителей установлены с возможностью вращения в противоположные стороны, в хвостовой части корпуса за центром масс летательного аппарата установлены симметрично продольной плоскости симметрии корпуса два одинаковых винта с наклоном вперед так, что линии, проходящие через оси вращения винтов, расположены ниже центра масс летательного аппарата от горизонтали на угол менее 10°.
Выполнение летательного аппарата вертикального взлета и посадки с двумя продольно расположенными аэродинамическими подъемно-тянущими движителями, в котором содержится корпус, в хвостовой части которого размещен пилон, установка на передней части корпуса и на пилоне в продольной плоскости симметрии корпуса осями движения одинаковых движителей с наклоном вперед от вертикали на угол менее 10°, установка аэродинамических поверхностей движителей с возможностью вращения в противоположные стороны, установка в хвостовой части корпуса за центром масс летательного аппарата симметрично продольной плоскости симметрии корпуса двух винтов с наклоном вперед так, что линии, проходящие через оси вращения винтов, расположены ниже центра масс летательного аппарата от горизонтали на угол менее 10°, позволяет располагать два отдельных движителя на летательном аппарате, обеспечивая их совместную работу так, чтобы аэродинамические поверхности движителей не оказывали влияния на работу друг друга.
Установка на передней части корпуса и на пилоне в продольной плоскости симметрии корпуса осями движения одинаковых движителей с наклоном вперед от вертикали на угол менее 10° и установка в хвостовой части корпуса за центром масс летательного аппарата симметрично продольной плоскости симметрии корпуса двух винтов с наклоном вперед так, что линии, проходящие через оси вращения винтов, расположены ниже центра масс летательного аппарата от горизонталь на угол менее 10°, позволяет на режиме горизонтального полета при создании момента на пикирование от горизонтальных тяг, направленных под углом наклона движителей, уравновешивать летательный аппарат установкой с винтами на определенный угол атаки, создающий минимальные потери подъемной силы от движителей.
Установка движителей с наклоном вперед от вертикали на угол в 10° и более и установка двух винтов с наклоном вперед так, что линии, проходящие через оси вращения винтов, расположены ниже центра масс летательного аппарата от горизонтали на угол 10° и более может привести к срыву потока обтекающего воздуха.
В летательном аппарате вертикального взлета и посадки с двумя продольно расположенными аэродинамическими подъемно-тянущими движителями может быть на пилоне хвостовой части корпуса размещен вертикально стабилизатор и руль направления, установленный с возможностью поворота, что позволяет менять направление полета на режиме горизонтального полета без использования затрат энергии винтов.
На фиг.1 изображен общий вид летательного аппарата вертикального взлета и посадки с двумя продольно расположенными аэродинамическими подъемно-тянущими движителями; на фиг.2 - схема создания движений аэродинамическими поверхностями аэродинамического подъемно-тянущего движителя; на фиг.3 - пилон со стабилизатором и рулем направления; на фиг.4 - разрез по А-А на фиг.3; на фиг.5 - схема аэродинамических сил, действующих на летательный аппарат в горизонтальном полете.
Летательный аппарат вертикального взлета и посадки с двумя продольно расположенными аэродинамическими подъемно-тянущими движителями 1 и 2, каждый из которых выполнен с по крайней мере двумя аэродинамическими поверхностями 3, имеющими возможность движения по окружности, например, в направлении, указанном по стрелке 4, синхронного вращения в противоположную сторону по стрелке 5 относительно оси вращения 6 параллельной оси движения 7 и колебания каждой аэродинамической поверхности 3 синхронно с вращением относительно двух взаимно перпендикулярных осей 8 и 9, находящихся соответственно в двух взаимно перпендикулярных плоскостях, пересекающихся по оси вращения 6 аэродинамической поверхности 3, причем одна из плоскостей проходит через ось движения 7 по окружности и ось вращения 6 аэродинамической поверхности 3. Взаимно перпендикулярные плоскости проходят через две взаимно перпендикулярные оси 8 и 9 на фиг.2 перпендикулярно плоскости чертежа.
Летательный аппарат содержит корпус 10, в хвостовой части которого размещен пилон 11, на передней части корпуса 10 и на пилоне 11 в продольной плоскости симметрии корпуса 10 установлены осями движения 7 одинаковые аэродинамические подъемно-тянущие движители 1 и 2 с наклоном вперед от вертикали на угол менее 10°. Аэродинамические поверхности 3 аэродинамических подъемно-тянущих движителей 1 и 2 установлены с возможностью вращения в противоположные стороны.
В хвостовой части корпуса 10 за центром масс 12 летательного аппарата установлены симметрично продольной плоскости симметрии корпуса 10 два одинаковых винта 13 и 14 с наклоном вперед так, что линии, проходящие через оси вращения винтов 13 и 14, расположены ниже центра масс 12 летательного аппарата от горизонтали на угол менее 10°.
На пилоне 11 хвостовой части корпуса 10 могут быть размещены вертикально стабилизатор 15 и руль управления 16, установленный с возможностью поворота.
При горизонтальном полете летательного аппарата каждым из двух аэродинамических подъемно-тянущих движителей 1 и 2 создается общая аэродинамическая сила 17, раскладываемая на подъемную аэродинамическую силу 18 и горизонтальную тягу 19. Летательный аппарат располагается под углом атаки 20 к направлению полета, показанному стрелкой 21. Момент на пикирование 22 относительно оси Z создается от горизонтальных тяг 19, создаваемых всеми аэродинамическими подъемно-тянущими движителями 1 и 2, а компенсирующий момент 23 создается тягами 24 и 25 винтов 13 и 14, проходящих через оси вращения винтов 13 и 14.
Полет летательного аппарата осуществляется следующим образом.
Используются два аэродинамических подъемно-тянущих движителя 1 и 2 с аэродинамическими поверхностями 3. Каждая аэродинамическая поверхность 3 на любом из двух аэродинамических подъемно-тянущих движителей 1 и 2 движется по окружности в направлении, указанном стрелкой 4 относительно оси движения 7, и синхронно вращается в противоположную сторону по стрелке 5 относительно оси вращения 6 параллельной оси движения 7 с угловой скоростью, равной угловой скорости движения по окружности. Вследствие создания поступательного движения аэродинамических поверхностей 3 обеспечивается равномерное распределение аэродинамических сил по аэродинамическим поверхностям 3, приводящее к высокой эффективности создания подъемной силы. Каждая аэродинамическая поверхность 3 совершает колебания синхронно с вращением относительно двух взаимно перпендикулярных осей 8 и 9, находящихся соответственно в двух взаимно перпендикулярных плоскостях, пересекающихся по оси вращения 6 аэродинамических поверхностей 3, причем одна из плоскостей проходит через ось движения 7 по окружности и ось вращения 6, при этом вместе с подъемной силой 18 создается и горизонтальная тяга 19, а распределение аэродинамических сил на аэродинамических поверхностях 3 остается равномерным.
На режимах вертикального полета (подъем, висение, снижение) летательного аппарата действуют подъемные силы 18 и горизонтальные составляющие, образуемые от наклона вперед обоих аэродинамических подъемно-тянущих движителей 1 и 2. Для продольного уравновешивания летательного аппарата подъемная сила 18, создаваемая аэродинамическим подъемно-тянущим движителем 1, превосходит подъемную силу 17, создаваемую аэродинамическим подъемно-тянущим движителем 2.
При вертикальном полете летательного аппарата направление полета может быть изменено созданием каждым из аэродинамических подъемно-тянущих движителей 1 и 2 боковых тяг противоположного направления за счет создания колебаний каждой аэродинамической поверхности 3 относительно двух взаимно перпендикулярных осей 8 и 9, но со сдвигом по фазе.
На режиме горизонтального полета летательного аппарата действуют подъемные силы 18 и горизонтальные тяги 19 обоих аэродинамических подъемно-тянущих движителей 1 и 2, создаваемые при их работе. От горизонтальных тяг 19 создается момент на пикирование 22. Для уравновешивания момента на пикирование 22 летательный аппарат устанавливается под углом атаки 20 к направлению полета 21, создавая компенсирующий момент 23 от тяг 24 и 25 работающих винтов 13 и 14, проходящих ниже центра масс 12 летательного аппарата.
При горизонтальном полете летательного аппарата направление полета может быть изменено за счет создания разности тяг 24 и 25 работающих винтов 13 и 14.
Предложенный летательный аппарат вертикального взлета и посадки с двумя аэродинамическими подъемно-тянущими движителями позволяет осуществлять полет летательного аппарата с высокой энергетической эффективностью.




Изобретение относится к области авиационной техники. Летательный аппарат (ЛА) содержит корпус 10 с пилоном 11. На передней части корпуса 10 и на пилоне 11 в продольной плоскости симметрии корпуса 10 установлены осями движения одинаковые движители 1 и 2 с наклоном вперед от вертикали на угол менее 10°. Аэродинамические поверхности 3 движителей установлены с возможностью вращения в противоположные стороны. За центром масс ЛА установлены симметрично продольной плоскости симметрии корпуса 10 два одинаковых винта 13 и 14 с наклоном вперед так, что линии, проходящие через оси вращения винтов 13 и 14, расположены ниже центра масс ЛА от горизонтали на угол менее 10°. На пилоне 11 размещены вертикально стабилизатор и руль направления. При полете ЛА действуют подъемные силы и горизонтальные тяги обоих движителей 1 и 2. От горизонтальных тяг создается момент на пикирование, а для уравновешивания его ЛА устанавливается под углом атаки к направлению полета, создавая компенсирующий момент от тяг работающих винтов, проходящих ниже центра масс. Технический результат - расширение арсенала технических средств. 1 з.п.ф-лы, 5 ил.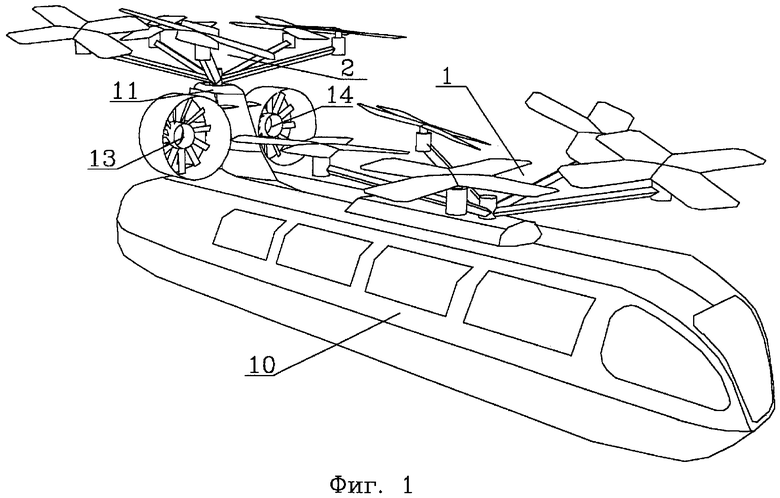
| СПОСОБ СОЗДАНИЯ ПОДЪЕМНОЙ СИЛЫ И ГОРИЗОНТАЛЬНОЙ ТЯГИ АЭРОДИНАМИЧЕСКИМИ ПОВЕРХНОСТЯМИ | 2002 |
|
RU2227107C2 |

