Изобретение относится к аэродинамике летательных аппаратов и представляет собой аэродинамический подъемно-тянущий движитель, устанавливаемый на летательном аппарате для создания подъемной силы и тяги.
Известен вращающийся несущий винт вертолета, создающий подъемную силу и тягу (А.М.Володко “Вертолет - труженик и воин”, М.: изд. ДОСААФ, 1984, с.82).
Известны лопасти несущего винта вертолета, создающие при их вращении подъемную силу и силу тяги при полете вертолета (У.Джонсон “Теория вертолета”, кн. 1, М.: Мир, 1983, с.17).
Недостатком известных несущих винтов вертолета является низкая эффективность создания подъемной силы, вследствие чего для получения приемлемых величин подъемной силы к ним необходимо подводить значительную мощность. При вращении лопастей несущего винта сечения лопастей имеют различную скорость относительно воздуха тем меньшую, чем меньше радиусы окружностей, описываемых этими сечениями. В результате поверхностное распределение аэродинамической силы на лопастях оказывается неравномерным (близким к квадратичному), что существенно снижает эффективность создания подъемной силы.
В основу изобретения поставлена задача создания аэродинамического подъемно-тянущего движителя, в котором обеспечивается близкое к равномерному распределение аэродинамических сил по аэродинамическим поверхностям, приводящее к высокой эффективности создания как подъемной силы, так и горизонтальной тяги.
Задача создания аэродинамического подъемно-тянущего движителя решается тем, что аэродинамический подъемно-тянущий движитель состоит из рамы с осью, относительно которой рама установлена с возможностью вращения, по крайней мере двух аэродинамических поверхностей, каждая их которых закреплена на карданном шарнире с возможностью колебаний синхронно с вращением рамы, карданный шарнир прикреплен к стержню, установленному на раме, оси крестовины карданного шарнира взаимно перпендикулярны и находятся соответственно в двух взаимно перпендикулярных плоскостях, пересекающихся по оси стержня, причем одна из них проходит через ось вращения рамы и ось стержня, стержень установлен параллельно оси рамы, ось рамы соединена с каждой аэродинамической поверхностью механической передачей, обеспечивающей возможность вращения аэродинамической поверхности синхронно и обратно вращению рамы.
Наличие рамы с осью, относительно которой рама установлена с возможностью вращения по крайней мере двух аэродинамических поверхностей, каждая из которых закреплена на карданном шарнире с возможностью колебаний синхронно с вращением рамы, прикрепление карданного шарнира к стержню, установленному на раме, так что оси крестовины карданного шарнира взаимно перпендикулярны и находятся соответственно в двух взаимно перпендикулярных плоскостях, пересекающихся по оси стержня, причем одна из них проходит через ось вращения и ось стержня, установка стержня параллельно оси рамы, соединение оси рамы с каждой аэродинамической поверхностью механической передачей, обеспечивающей возможность вращения аэродинамической поверхности синхронно и обратно вращению рамы, обеспечивают вращение каждой аэродинамической поверхности синхронно с движением по окружности в противоположную ему сторону относительно стержня с угловой скоростью, равной угловой скорости движения по окружности, что создает поступательное (без вращения) движение аэродинамической поверхности относительно воздуха и обеспечивает равномерное распределения аэродинамических сил по аэродинамической поверхности, приводящее к высокой эффективности подъемной силы. Совершение колебаний каждой аэродинамической поверхностью синхронно с их вращением относительно осей крестовины карданного шарнира обеспечивает одновременно с созданием подъемной силы и создание горизонтальной тяги.
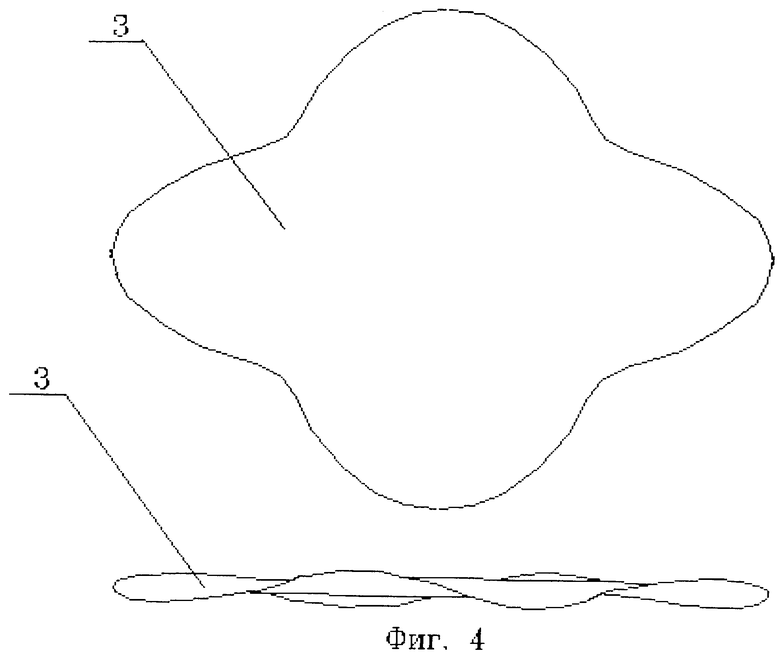
В аэродинамическом подъемно-тянущем движителе каждая аэродинамическая поверхность может быть закручена относительно осей, параллельных осям крестовины карданного шарнира и проходящих через аэродинамическую поверхность, что приводит к созданию момента, способствующего колебаниям аэродинамической поверхности, и обеспечивает уменьшение усилий, затрачиваемых на ее колебания, и тем самым снижает мощность, прилагаемую для колебаний, и увеличивает эффективность создания подъемной силы и тяги.
Количество аэродинамических поверхностей выбирается экспериментально-расчетным методом из условия создания требуемой подъемной силы.
На фиг.1 изображен вид сверху аэродинамического подъемно-тянущего движителя; на фиг.2 - вид снизу аэродинамического подъемно-тянущего движителя; на фиг.3 - схема механической передачи, обеспечивающей вращение аэродинамической поверхности; на фиг.4 - закрученная аэродинамическая поверхность.
Аэродинамический подъемно-тянущий движитель содержит раму 1 с осью 2, относительно которой рама 1 установлена с возможностью вращения. Привод вращения рамы 1 относительно оси 2 (на чертеже не показан) может быть выполнен в виде двигателя, установленного на оси 2, на валу которого закреплена звездочка, а на раме 1 на другой прикрепленной к ней оси закреплена вторая звездочка, обе звездочки соединены приводной цепью. Имеются по крайней мере две аэродинамические поверхности 3, каждая из которых закреплена на карданном шарнире 4 (фиг.3) с возможностью колебаний синхронно с вращением рамы 1. Карданный шарнир 4 прикреплен к стержню 5, установленному на раме 1, стержень 5 установлен параллельно оси 2. Оси 6 и 7 крестовины карданного шарнира 4 взаимно перпендикулярны и находятся соответственно в двух взаимно перпендикулярных плоскостях, пересекающихся по оси стержня 5, причем одна из них проходит через ось 2 вращения и ось стержня 5.
Ось 2 соединена с каждой аэродинамической поверхностью 3 механической передачей, установленной на раме 1 и обеспечивающей возможность вращения аэродинамической поверхности 3 вместе со стержнем 5 синхронно и обратно вращению рамы 1.
На оси 2 закреплено коническое зубчатое колесо 8, с которым находится в зацеплении второе коническое зубчатое колесо 9, закрепленное на конце радиального вала 10, установленного на раме 1. На другом конце радиального вала 10 закреплено коническое зубчатое колесо 11, находящееся в зацеплении с коническим зубчатым колесом 12, закрепленным на конце стержня 5. Конические зубчатые колеса 8, 9, а также 11, 12 одинаковы.
Колебания аэродинамических поверхностей 3 осуществляются механическим копировальным механизмом, состоящим из профилированного диска 13, закрепленного на стержне 5, на котором установлена аэродинамическая поверхность 3 на карданном шарнире 4. По профилированному диску 13 скользят вертикальные штоки-толкатели 14, взаимодействующие с аэродинамической поверхностью 3.
Каждая аэродинамическая поверхность 3 может быть закручена относительно осей, параллельных осям 6 и 7 крестовины карданного шарнира 4 и проходящих через аэродинамическую поверхность 3, что приводит к созданию момента, способствующего колебаниям аэродинамической поверхности 3, и обеспечивает уменьшение усилий, затрачиваемых на ее колебания, и тем самым снижает мощность, прилагаемую для колебаний.
Движитель работает следующим образом.
Рама 1 вместе с аэродинамическими поверхностями 3 вращается относительно оси 2 с помощью привода вращения рамы 1 со звездочками и приводной цепью. Одновременно каждая аэродинамическая поверхность 3 вместе с вращением рамы 1 движется по окружности вокруг оси 2 и синхронно с движением по окружности вращается вместе со стержнем 5 в сторону, противоположную вращению рамы 1, с угловой скоростью, равной угловой скорости движения по окружности с помощью механической передачи. Поскольку аэродинамические поверхности 3 движутся поступательно, создаваемая подъемная сила распределена на них равномерно, что и обеспечивает высокую энергетическую эффективность движителя.
При вращении рамы 1 вал 10 вместе с рамой 1 движется по окружности, при этом коническое зубчатое колесо 9 перекатывается по коническому зубчатому колесу 8 и вращение передается через конические зубчатые колеса 11 и 12 на стержень 5, вращающий аэродинамическую поверхность 3 синхронно вращению рамы 1 в противоположную сторону. Этим достигается поступательное без вращения движение аэродинамических поверхностей 3 вокруг оси 2.
Каждая аэродинамическая поверхность 3 совершает синхронно с вращением колебания относительно двух взаимно перпендикулярных осей 6 и 7 крестовины карданного шарнира 4 перпендикулярно оси 2 вращения рамы 1 за счет вращения стержня 5 и профилированного диска 13, по которому скользят вертикальные штоки-толкатели 14 и колеблют аэродинамические поверхности 3 на определенные углы, обеспечивая создание горизонтальной тяги одновременно с созданием подъемной силы, причем распределение аэродинамической силы на аэродинамических поверхностях 3 остается равномерным.
Предложенный аэродинамический подъемно-тянущий движитель позволяет осуществить полет летательного аппарата с высокой энергетической эффективностью.


Изобретение относится к аэродинамике летательных аппаратов (ЛА) и представляет собой аэродинамический движитель, устанавливаемый на ЛА для создания подъемной силы и силы тяги. Движитель содержит раму 1 с осью 2, относительно которой рама 1 установлена с возможностью вращения с помощью привода вращения. По крайней мере две аэродинамические поверхности 3 закреплены на карданных шарнирах с возможностью колебаний синхронно с вращением рамы 1, а карданный шарнир прикреплен к стержню 5, установленному на раме 1. Ось 2 соединена с поверхностями 3 механической передачей, обеспечивающей возможность их вращения синхронно и обратно вращению рамы вместе со стержнем 5. Колебания поверхностей 3 осуществляется механическим копировальным механизмом. Каждая поверхность 3 может быть закручена относительно осей, параллельных осям крестовины карданного шарнира и проходящих через аэродинамическую поверхность 3. Рама 1 вместе с поверхностями 3 вращается относительно оси 2 с помощью привода вращения. Каждая аэродинамическая поверхность 3 синхронно с движением по окружности вращается в противоположную ему сторону с угловой скоростью, равной угловой скорости движения поверхностей 3. Каждая поверхность 3 совершает синхронно с вращением колебания за счет механического копировального механизма. Изобретение позволяет обеспечить более равномерное распределение аэродинамических сил по аэродинамическим поверхностям, приводящее к высокой эффективности создания как подъемной силы, так и горизонтальной тяги. 1 з. п. ф-лы, 4 ил.

| ЛЕТАТЕЛЬНЫЙ АППАРАТ | 1999 |
|
RU2159726C1 |
| ГИБРИДНОЕ ВОЗДУШНОЕ СУДНО | 1996 |
|
RU2160689C2 |
| US 3630470 А, 29.12.1971 | |||
| US 3568953 А, 09.03.1971. | |||

