Изобретение относится к области авиационной техники и может быть применено в летательных аппаратах с вертикальным взлетом и посадкой, использующих аэродинамические подъемно-тянущие движители.
Известны опытные вертолеты и ряд проектов вертолетов многовинтовой схемы, в том числе и четырехвинтового вертолета, содержащего корпус, крылья и четыре винта, расположенные на крыльях (Изаксон А.М. "Советское вертолетостроение", Москва, Машиностроение 1981, с.9-10).
Однако в известных вертолетах используются несущие винты, имеющие недостаточную эффективность создания подъемной силы, вследствие чего для получения приемлемых величин подъемной силы к ним необходимо подводить значительную мощность, что приводит к снижению дальности полета и высоты подъема вертолета.
В предложенном изобретении использован новый аэродинамический подъемно-тянущий движитель, которым обеспечивается высокая эффективность создания как подъемной силы, так и горизонтальной тяги, приводящие к увеличению дальности полета и высоты подъема летательного аппарата (патент РФ №2227107, В 64 С 39/08, 2004; международная публикация WO 03/086857 от 23.10.2003, МПК В 64 С 11/46, 27/08; международная публикация WO 03/08858 от 23.10.2003, МПК В 64 С 11/46, 27/08).
В уровне техники не обнаружены аналоги - средства того же назначения.
В основу изобретения поставлена задача получения впервые летательного аппарата вертикального взлета и посадки с четырьмя аэродинамическими подъемно-тянущими движителями, каждый из которых выполнен по крайней мере двумя аэродинамическими поверхностями, имеющими возможность движения по окружности, синхронного вращения в противоположную сторону относительно оси вращения параллельной оси движения и колебания каждой аэродинамической поверхности синхронно с вращением относительно двух взаимно перпендикулярных осей, находящихся соответственно в двух взаимно перпендикулярных плоскостях, пересекающихся по оси вращения аэродинамической поверхности, причем одна из плоскостей проходит через ось движения по окружности и ось вращения аэродинамической поверхности.
Задача создания летательного аппарата вертикального взлета и посадки с четырьмя аэродинамическими подъемно-тянущими движителями решается тем, что в летательном аппарате вертикального взлета и посадки с четырьмя аэродинамическими подъемно-тянущими движителями, каждый из которых выполнен по крайней мере двумя аэродинамическими поверхностями, имеющими возможность движения по окружности, синхронного вращения в противоположную сторону относительно оси вращения параллельной оси движения и колебания каждой аэродинамической поверхности синхронно с вращением относительно двух взаимно перпендикулярных осей, находящихся соответственно в двух взаимно перпендикулярных плоскостях, пересекающихся по оси вращения аэродинамической поверхности, причем одна из плоскостей проходит через ось движения по окружности и ось вращения аэродинамической поверхности, содержащий корпус с хвостовой частью, на которой размещен пилон, установленные по бокам корпуса два крыла так, что фокусы профилей крыльев расположены впереди центра масс летательного аппарата, на передней части корпуса и на пилоне в продольной плоскости симметрии корпуса, а также на концах крыльев в поперечной плоскости корпуса установлены осями движения одинаковые движители с наклоном вперед от вертикали на угол менее 30°, аэродинамические поверхности движителей на концах крыльев установлены на одном уровне выше аэродинамических поверхностей движителя на передней части корпуса, а аэродинамические поверхности движителя на пилоне выше аэродинамических поверхностей движителей на концах крыльев, аэродинамические поверхности двух движителей имеют возможность двигаться по окружности в одну сторону, а аэродинамические поверхности двух других движителей - в противоположную сторону.
Выполнение летательного аппарата вертикального взлета и посадки с четырьмя аэродинамическими подъемно-тянущими движителями, в котором содержится корпус с хвостовой частью, на которой размещен пилон, установленные по бокам корпуса два крыла, установка на передней части корпуса и на пилоне в продольной плоскости симметрии корпуса, а также на концах крыльев в поперечной плоскости корпуса осями движения одинаковых движителей с наклоном вперед от вертикали на угол менее 30°, установка аэродинамических поверхностей движителей на концах крыльев на одном уровне выше аэродинамических поверхностей движителя на передней части корпуса, а аэродинамических поверхностей движителя на пилоне выше аэродинамических поверхностей на концах крыльев позволяет располагать четыре отдельных движителя на летательном аппарате, обеспечивая их совместную работу так, чтобы аэродинамические поверхности движителей не мешали работать друг другу (аэродинамические поверхности движителей установлены на крыльях на одном уровне выше аэродинамических поверхностей движителя на передней части корпуса, размещение пилона на хвостовой части и установка аэродинамических поверхностей движителей на пилоне выше аэродинамических поверхностей на концах крыльев).
Установка движителей на передней части корпуса и на пилоне, а также на концах крыльев позволяет симметрично расположить движители на летательном аппарате для создания равномерных усилий на летательный аппарат.
Установка осями движения одинаковых движителей с наклоном вперед от вертикали на угол менее 30° позволяет на режиме горизонтального полета при создании момента на пикирование от горизонтальных тяг, направленных под углом наклона движителей, уравновешивать его установкой летательного аппарата с крыльями на определенный угол атаки, создающий подъемные силы крыльями.
Расположение фокуса профиля крыльев впереди центра масс летательного аппарата позволяет создать уравновешивающий момент от подъемных сил крыльев.
В летательном аппарате вертикального взлета и посадки с четырьмя аэродинамическими подъемно-тянущими движителями могут быть два крыла, установленные по бокам корпуса, выполнены по схеме "прямое поперечное V", что позволяет более просто устанавливать движители на них на заданную высоту (без особой подставки), а также создать уравновешивающий момент относительно оси Х (угол крена) при боковом наклоне летательного аппарата за счет возникновения у накрененного крыла большей подъемной силы, действующей на крыло и возвращающей летательный аппарат в прежнее положение.
В летательном аппарате вертикального взлета и посадки с четырьмя аэродинамическими подъемно-тянущими движителями может быть на пилоне хвостовой части корпуса размещен вертикально стабилизатор и руль направления, установленный с возможностью поворота, что позволяет менять направление полета без изменения силы тяги аэродинамических подъемно-тянущих движителей, то есть без снижения их эффективности, приводящей к увеличению дальности полета и высоты подъема летательного аппарата.
В летательном аппарате вертикального взлета и посадки с четырьмя аэродинамическими подъемно-тянущими движителями каждая аэродинамическая поверхность может быть выполнена из по крайней мере двух отдельных аэродинамических поверхностей, имеющих суммарную проективную площадь, равную проективной площади каждой аэродинамической поверхности, что позволяет для тяжелых летательных аппаратов с массой более 100 т уменьшить их размеры и толщину при обеспечении требуемой жесткости и прочности, что увеличивает эффективность аэродинамических подъемно-тянущих движителей и приводит к увеличению дальности полета и высоты подъема летательного аппарата.
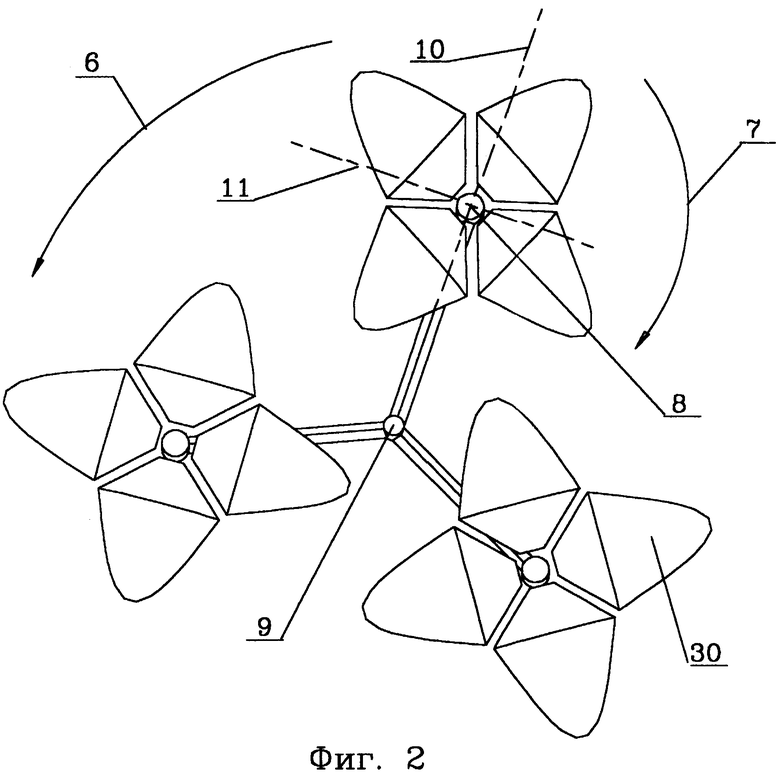
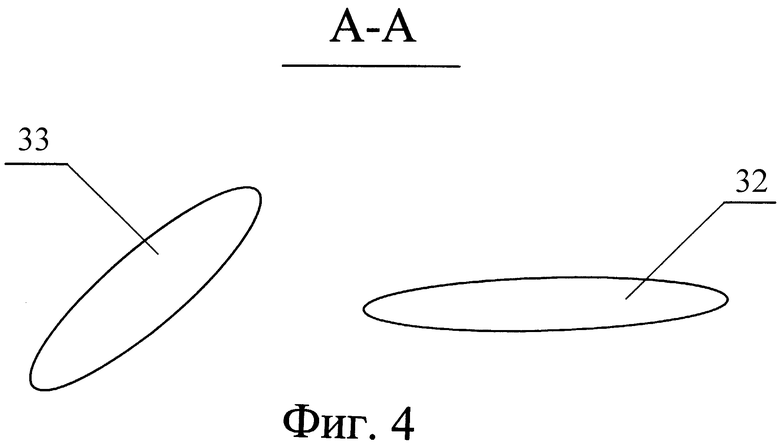
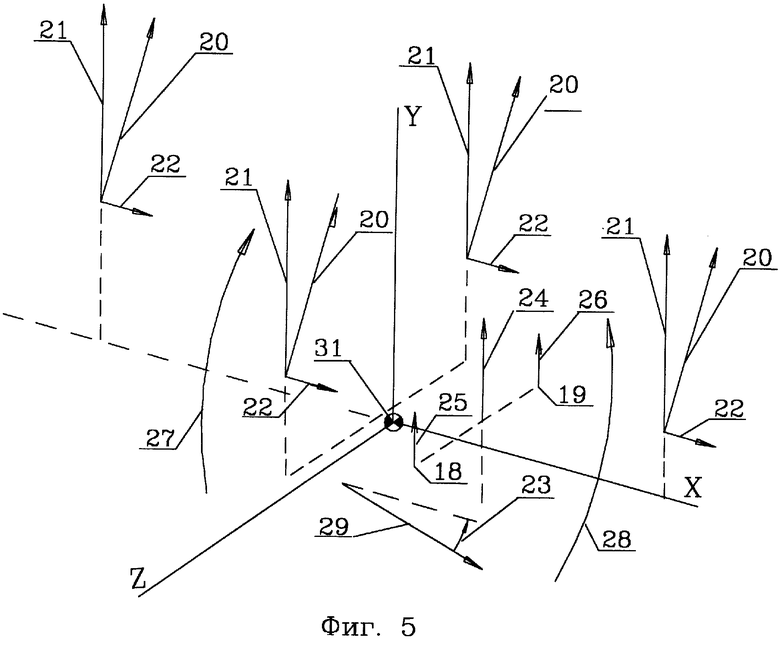
На фиг.1 изображен общий вид летательного аппарата вертикального взлета и посадки с четырьмя аэродинамическими подъемно-тянущими движителями; на фиг.2 - вид сверху на аэродинамический подъемно-тянущий движитель, в котором каждая аэродинамическая поверхность выполнена из четырех отдельных аэродинамических поверхностей; на фиг.3 - пилон со стабилизатором и рулем направления; на фиг.4 - разрез по А-А на фиг.3; на фиг.5 - схема аэродинамических сил, действующих на летательный аппарат в горизонтальном полете.
Летательный аппарат вертикального взлета и посадки с четырьмя аэродинамическими подъемно-тянущими движителями 1, 2, 3 и 4, каждый из которых выполнен с по крайней мере двумя аэродинамическими поверхностями 5, имеющими возможность движения по окружности, например, в направлении, указанном по стрелке 6, синхронного вращения в противоположную сторону по стрелке 7 относительно оси вращения 8 параллельной оси движения 9 и колебания каждой аэродинамической поверхности 5 синхронно с вращением относительно двух взаимно перпендикулярных осей 10 и 11, находящихся соответственно в двух взаимно перпендикулярных плоскостях, пересекающихся по оси вращения 8 аэродинамической поверхности 5, причем одна из плоскостей проходит через ось движения 9 по окружности и ось вращения 8 аэродинамической поверхности. Взаимно перпендикулярные плоскости проходят через две взаимно перпендикулярные оси 10 и 11 на фиг.2 перпендикулярно плоскости чертежа.
Летательный аппарат вертикального взлета и посадки с четырьмя аэродинамическими подъемно-тянущими движителями содержит корпус 12 с хвостовой частью 13, на которой размещен пилон 14, по бокам корпуса 12 установлены два крыла 15 и 16 так, что фокусы профилей 18 и 19 крыльев 15 и 16 расположены впереди центра масс 31 летательного аппарата. Крылья 15 и 16 могут иметь различную форму, например стреловидную, трапециевидную, прямоугольную.
На передней части корпуса 12 и на пилоне 14 на продольной плоскости симметрии корпуса 12, а также на концах крыльев 15 и 16 по поперечной плоскости корпуса 12 установлены осями движения одинаковые аэродинамические подъемно-тянущие движители 1, 2, 3, и 4 с наклоном вперед от вертикали на угол менее 30°.
Аэродинамические поверхности 5 аэродинамических подъемно-тянущих движителей 2 и 4 на концах крыльев 15 и 16 установлены на одном уровне выше аэродинамических поверхностей 5 аэродинамического подъемно-тянущего движителя 1 на передней части корпуса 12, а аэродинамические поверхности 5 аэродинамического подъемно-тянущего движителя 3 - на пилоне 14 выше аэродинамических поверхностей 5 аэродинамических подъемно-тянущих движителей 2 и 4 на концах крыльев 15 и 16. Аэродинамические поверхности 5 двух любых аэродинамических подъемно-тянущих движителей имеют возможность двигаться по окружности в одну сторону, а аэродинамические поверхности двух других аэродинамических подъемно-тянущих движителей имеют возможность двигаться по окружности в противоположную сторону.
Летательный аппарат может быть выполнен так, что два крыла 15 и 16, установленные по бокам корпуса 12, выполнены по схеме "прямое поперечное V".
Летательный аппарат может быть выполнен так, что на пилоне 14 хвостовой части 13 корпуса 12 размещен вертикально стабилизатор 32 и руль направления 33, установленный с возможностью поворота (фиг.3).
Летательный аппарат может быть выполнен так, что каждая аэродинамическая поверхность 5 выполнена из по крайней мере двух отдельных аэродинамических поверхностей 30, имеющих суммарную проективную площадь, равную проективной площади каждой аэродинамической поверхности (фиг.2).
При горизонтальном полете летательного аппарата каждым из четырех аэродинамических подъемно-тянущих движителей 1, 2, 3 и 4 создается общая аэродинамическая сила 20, раскладываемая на подъемную аэродинамическую силу 21 и горизонтальную тягу 22. Летательный аппарат располагается под оптимальным углом атаки 23 к направлению полета, показанному стрелкой 29, а двумя крыльями 15 и 16 создается суммарная подъемная сила 24 от подъемных сил 25 и 26 крыльев 15 и 16. Момент на пикирование 27 создается от горизонтальных тяг 22, создаваемых всеми аэродинамическими подъемно-тянущими движителями 1, 2, 3 и 4, а компенсирующий момент 28 создается подъемными силами 25 и 26 крыльев 15 и 16.
Полет летательного аппарата осуществляется следующим образом.
Используют четыре аэродинамических подъемно-тянущих движителя 1, 2, 3 и 4 с тремя аэродинамическими поверхностями 5 на каждом из них. Каждая аэродинамическая поверхность 5 на любом из четырех аэродинамических подъемно-тянущих движителей 1, 2, 3 и 4 движется по окружности в направлении, указанном стрелкой 6, относительно оси движения 9 и синхронно вращается в противоположную сторону по стрелке 7 относительно оси вращения 8, параллельной оси движения 9, с угловой скоростью, равной угловой скорости движения по окружности. Вследствие создания поступательного движения аэродинамических поверхностей 5 обеспечивается равномерное распределение аэродинамических сил по аэродинамическим поверхностям 5, приводящее к высокой эффективности создания подъемной силы. Каждая аэродинамическая поверхность 5 совершает колебания синхронно с вращением относительно двух взаимно перпендикулярных осей 10 и 11, находящихся соответственно в двух взаимно перпендикулярных плоскостях, пересекающихся по оси вращения 8 аэродинамических поверхностей 5, причем одна из плоскостей проходит через ось движения 9 по окружности и ось вращения 8, при этом вместе с подъемной силой 21 создается и горизонтальная тяга 22, причем распределение аэродинамических сил на аэродинамических поверхностях 5 остается равномерным.
На режимах вертикального полета (подъем, висение, снижение) летательного аппарата действуют подъемные силы 21 и горизонтальные составляющие, образуемые от наклона вперед всех четырех аэродинамических подъемно-тянущих движителей 1, 2, 3 и 4. Для продольного уравновешивания летательного аппарата подъемная сила 21, создаваемая аэродинамическим подъемно-тянущим движителем 1, превосходит подъемную силу 21, создаваемую аэродинамическим подъемно-тянущим движителем 3.
На режиме горизонтального полета летательного аппарата действуют подъемные силы 21 и горизонтальные тяги 22 всех четырех аэродинамических подъемно-тянущих движителей 1, 2, 3 и 4, создаваемые при их работе. От горизонтальных тяг 22 создается момент на пикирование 27 относительно оси Z. Для уравновешивания момента на пикирование 27 летательный аппарат с крыльями 15 и 16 устанавливается под углом атаки 23, создавая компенсирующий момент 28 подъемными силами 25 и 26 от крыльев 15 и 16, фокус профиля которых расположен впереди центра масс 31 летательного аппарата.
Аэродинамические поверхности 5 двух любых из аэродинамических подъемно-тянущих движителей 1, 2, 3 и 4, вращающихся в одну сторону, взаимно уравновешивают вращающиеся в другую сторону аэродинамические поверхности 5 из двух других аэродинамических подъемно-тянущих движителей 1, 2, 3 и 4.
При горизонтальном полете летательного аппарата направление полета может быть изменено изменением величины силы тяги 22 аэродинамических подъемно-тянущих движителей 2 и 4, установленных на концах крыльев 15 и 16.
Изменение направления полета может быть также осуществлено поворотом руля направления 18.
При выполнении аэродинамических поверхностей из по крайней мере двух отдельных аэродинамических поверхностей 30 отдельные аэродинамические поверхности 30 вращаются как единое целое и синхронно осуществляют колебания, создавая также подъемную силу 21 и горизонтальную тягу 22, и летательный аппарат осуществляет как режим вертикального полета, так и режим горизонтального полета. Наиболее оптимальным является выполнение из четырех отдельных аэродинамических поверхностей 30.
Установка аэродинамических подъемно-тянущих движителей 1, 2, 3 и 4 осями движения с наклоном вперед от вертикали на угол менее 30° обусловлена возможностью срыва потока и как следствие падением подъемной силы и потерей устойчивости движения летательного аппарата.
Предложенный летательный аппарат вертикального взлета и посадки с четырьмя аэродинамическими подъемно-тянущими движителями позволяет осуществить полет летательного аппарата с высокой энергетической эффективностью.

Изобретение относится к области авиационной техники. Летательный аппарат содержит корпус 12, два крыла 15 и 16, установленные так, что фокусы профилей крыльев 15 и 16 расположены впереди центра масс летательного аппарата. На передней части корпуса 12 и на пилоне 14 на продольной оси корпуса 12, а также на концах крыльев 15 и 16 установлены аэродинамические движители 1-4 с наклоном вперед от горизонтали на угол менее 30°. Аэродинамические поверхности движителей 2 и 4 на концах крыльев 15 и 16 установлены на одном уровне выше аэродинамических поверхностей движителя 1 на передней части корпуса 12, а аэродинамические поверхности движителя 3 на пилоне 14 - выше аэродинамических поверхностей движителей 2 и 4. Аэродинамические поверхности двух любых движителей имеют возможность двигаться по окружности в одну сторону, а аэродинамические поверхности двух других движителей имеют возможность двигаться по окружности в противоположную сторону. На пилоне 14 размещены стабилизатор и руль направления. Технический результат - расширение арсенала технических средств. 3 з.п. ф-лы, 5 ил.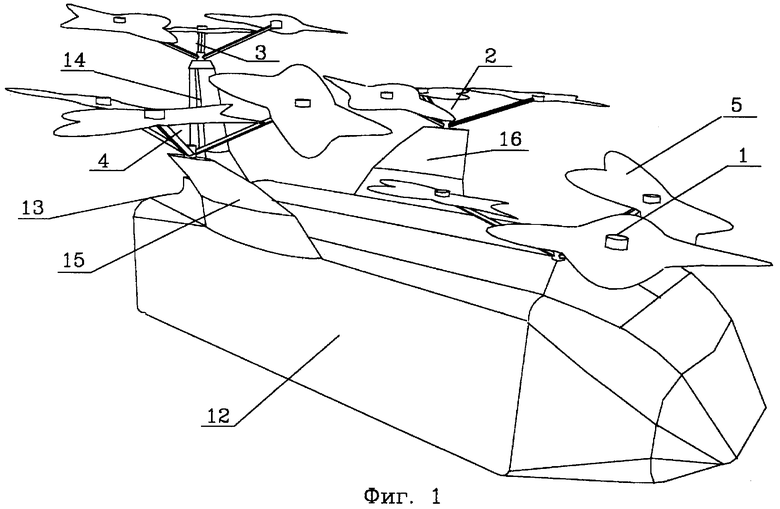
| RU 2001836 C1, 30.10.1993.US 3873049 A, 25.03.1975.GB 191100097 A, 28.09.1911. |

