Изобретение относится к области подъемно-транспортного машиностроения в части использования автоматических грузозахватных устройств при работе в опасных для человека условиях с объектами в виде плиты или подобных объектов с грузозахватными элементами в виде петель или проушин.
Известно автоматизированное грузозахватное устройство [Патент RU №2268229 C1, B66C 1/66 (2006.1) Авторы Кравченко П.Д. и др. Опубл. 20.01.2006. Бюл. №02] для работы с одним захватным элементом объекта - петлей или проушиной. Устройство отличается наличием сложной формы клиновых деталей и пружин. Для применения его в условиях работы с плитами при наличии 2 или 4 захватных петель или проушин потребуется усложнение конструкции, обусловленное применением отдельных устройств для каждой петли или проушины.
Технической задачей, поставленной в настоящем изобретении, является упрощение конструкции, достигаемое использованием только силы тяжести устройства и использованием особенностей геометрической формы грузозахватных элементов.
Устройство представлено на фиг.1 в положении, когда произошло зацепление объекта. Устройство состоит из корпуса 1, к которому присоединен узел 2 подвески на крюк грузоподъемного крюка. К корпусу 1 присоединен направляющий корпус 3, в котором по ходовой посадке перемещается толкатель 12 в виде обычного цилиндрического стержня и элемент фиксирующий 10 в виде цилиндра или четырехгранной призмы. Форма элемента фиксирующего принимается из условий обеспечения его контакта с концевыми элементами выступов 7 отклоняющих на крюках 8.
Процесс взаимодействия выступов 7 отклоняющих с элементом 10 фиксирующим представлен на фиг.2 и 3 в момент фиксирования крюков и освобождения элемента 10 и освобождения крюков от контакта с ними.
К корпусу 1 жестко присоединены упоры 5 для ориентированного положения крюков 8 в исходных положениях при контакте упорных выступов крюков с упорами 5.
Оси 9 устанавливаются каждая в двух проушинах 6, приваренных к корпусу 1. Крюки 8 фигурные могут свободно вращаться относительно осей 9. Конфигурация крюка 8 отличается наличием направляющих кромок 15, которые скользят по кромке грузовой петли или проушины 13 плиты 16 при начале операции зацепления и кромки отклоняющей 14, скользящей по нижней кромке и боковой поверхности грузовой петли или проушины 13 при отцеплении захвата. На крюке 8 имеется выступ 7 отклоняющий для взаимодействия с элементом фиксирующим 10 и выступ упорный для взаимодействия с упором 5. Корпус направляющий 3 имеет боковые прорези - пазы 4 для обеспечения контакта выступа 7 отклоняющего крюка 8 с фиксирующим элементом 10. Центр масс 11 крюка показан для объяснения условий работы захвата. Крюк 8 всегда стремится занять положение, в котором центр масс 11 будет располагаться на вертикали, проходящей через центр оси 9. Вращающий момент от равнодействующей сил тяжести крюка, приложенной в точке центра масс 11 относительно центра оси 9, всегда стремится повернуть крюк левый - по часовой стрелке, а крюк правый - против часовой стрелки.
При опускании захвата толкатель 12 касается поверхности плиты 16 и толкает элемент фиксирующий 10 вверх, как показано на фиг.2.
В этом положении элемент фиксирующий зажимается выступами отклоняющими 7 крюков 8 и фиксируется под воздействием указанных вращающих моментов.
Устройство работает следующим образом. Навешенное на крюк грузоподъемного крана устройство опускается по вертикали, крюки 8 при скольжении кромок направляющих 15 по боковым граням петель 13 отклоняются, вращаясь относительно осей 9, и при зацеплении объекта занимает положение, показанное на фиг.1. Объект зацеплен и готов к подъему и перемещению на заданную технологическую позицию.
Для освобождения объекта устройство опускается ниже, при этом толкатель 12 при контакте с поверхностью плиты поднимает элемент фиксирующий 10, который отводит отклоняющие выступы 7, поворачивая крюки 8 относительно осей 9 в крайнее положение, где крюки оказываются в зафиксированном положении: элемент фиксирующий 10 теперь зажат выступами отклоняющими под воздействием указанных вращающих моментов. Крюки 8 отведены и зафиксированы, как показано на фиг.2. Это положение, при котором кромки отклоняющие 14 крюков 8 не выходят за боковые кромки петель плиты.
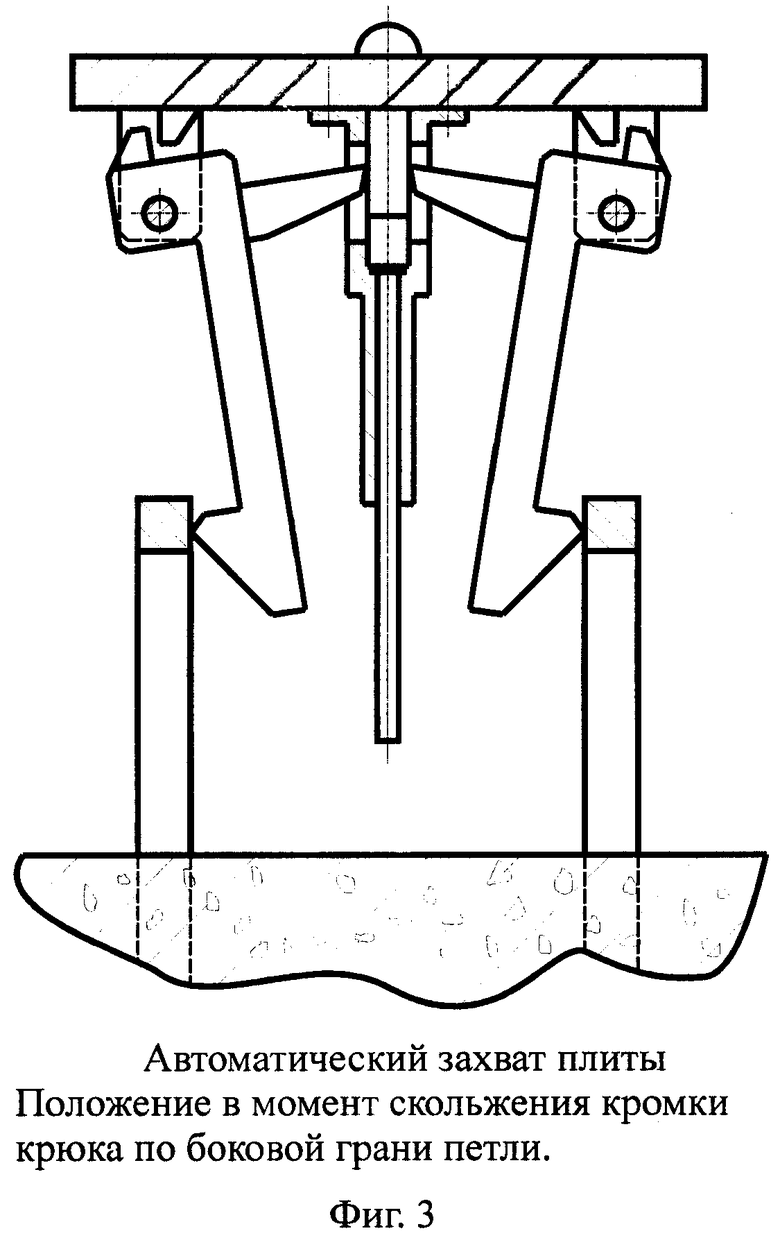
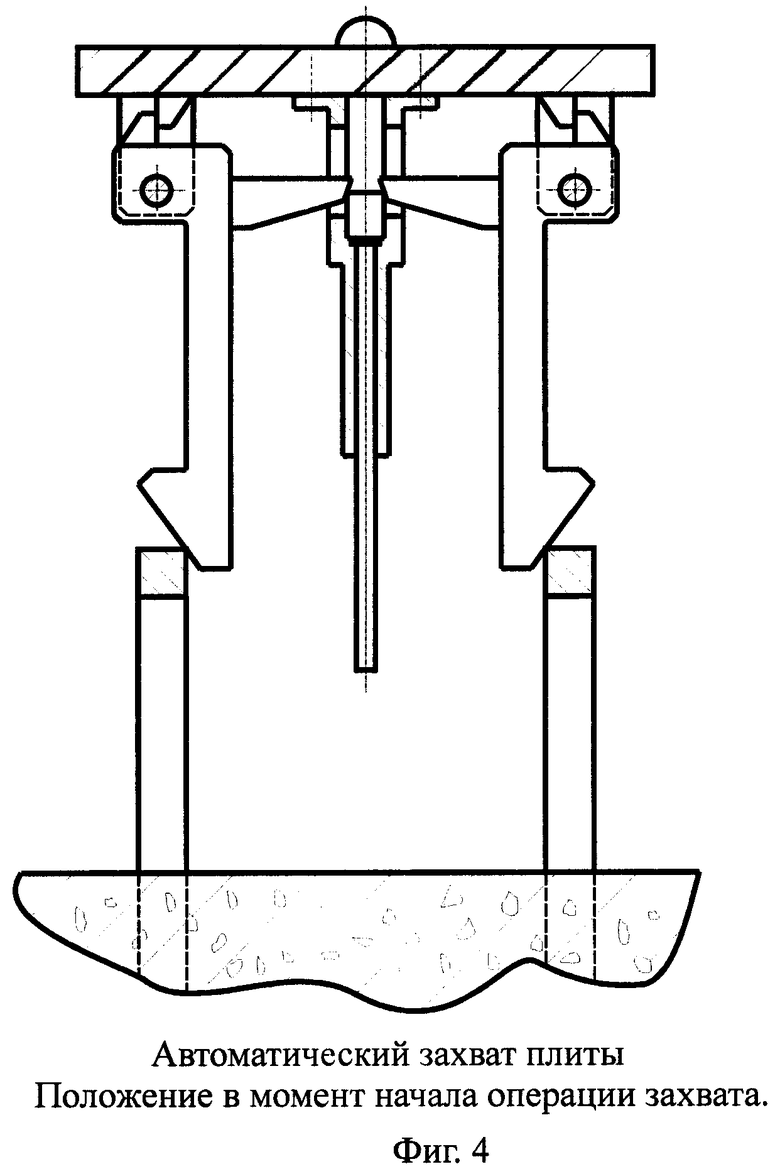
При дальнейшем подъеме устройства кромки отклоняющие 14 скользят по боковым поверхностям петель 13, поворачивая крюки 8 относительно оси 9, как показано на фиг.3, элемент фиксирующий 10 при этом освобождается и под действием сил собственной тяжести опускается вниз. Крюки 8 расфиксированы и при дальнейшем подъеме устройства и выходе кромок отклоняющих из контакта с боковыми гранями петли 13 стремится занять вертикальное положение под действием указанных вращающих моментов. Для обеспечения исходного положения крюки устанавливается в позицию, при которой упоры 5 и упорные выступы крюков создают условия для обеспечения скользящего контакта кромок направляющих 15 с боковыми гранями петель 13 плиты, как показано на фиг.4.
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1983 |
|
SU1122603A1 |
| ЗАХВАТ-КАНТОВАТЕЛЬ ДЛЯ ГРУЗОВ ЦИЛИНДРИЧЕСКОЙ ФОРМЫ С ЦЕНТРАЛЬНЫМ ОТВЕРСТИЕМ | 1994 |
|
RU2116239C1 |
| Устройство для установки анкерной крепи | 1990 |
|
SU1789722A1 |
| Захват-кантователь | 1987 |
|
SU1512914A1 |
| СПОСОБ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА И КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2312038C1 |
| Устройство для испытания прочности монтажных петель | 1991 |
|
SU1795051A1 |
| Грузозахватная траверса | 1978 |
|
SU765186A1 |
| АВТОМОБИЛЬ-САМОСВАЛ | 2009 |
|
RU2415044C1 |
| ПОДВЕСНОЙ АВТОМАТИЧЕСКИЙ ЗАХВАТ-ЛОВИТЕЛЬ | 2011 |
|
RU2474528C2 |
| Грузозахватное устройство | 1978 |
|
SU880944A1 |

Изобретение предназначено для использования в подъемно-транспортных операциях при работе с плитами перекрытий, имеющими грузовые петли или проушины. Захват содержит корпус, узел подсоединения к крюку грузоподъемного крана, два упора, четыре проушины, два фигурных крюка, корпусы направляющего фиксатора и толкателя. Фигурные крюки выполнены с отклоняющими к направляющими кромками и фиксирующими и упорными выступами. Фиксирующий элемент выполнен в виде цилиндра или четырехгранной призмы, а толкатель выполнен в виде цилиндрического стержня с возможностью свободного перемещения по вертикали в корпусе направляющем. Отклоняющие и направляющие кромки фигурных крюков выполнены прямолинейными и наклонными с возможностью скольжения по поверхностям петель плиты. Достигается упрощение конструкции. 4 ил.
Автоматический захват плиты, содержащий корпус с узлом подвески к крюку грузоподъемного крана, два упора, четыре проушины, две оси, два крюка, корпуса направляющего толкателя и фиксирующего элемента, отличающийся тем, что подвешенные на осях с возможностью свободного вращения относительно горизонтальной оси крюки выполнены фигурными с направляющими и отклоняющими кромками и отклоняющими и упорными выступами, фиксирующий элемент выполнен в виде цилиндра или четырехгранной призмы с возможностью перемещения по вертикали в корпусе направляющем и возможностью его фиксации упорными выступами крюков, толкатель выполнен в виде цилиндрического стержня с возможностью свободного перемещения по вертикали в корпусе направляющем, кромки отклоняющие и направляющие крюков фигурных выполнены прямолинейными и наклонными с возможностью скольжения по поверхностям петель плиты.
| АВТОМАТИЗИРОВАННОЕ ГРУЗОЗАХВАТНОЕ УСТРОЙСТВО | 2004 |
|
RU2268229C1 |
| US 2007262599 A1, 15.11.2007 | |||
| Захват для изделий со сквозным отверстием | 1984 |
|
SU1224241A1 |

